

-
摘要: 陆空多模态机器人在灾害救援、特种巡检、外星探索等方面展现出重要的应用潜力, 具有环境适应性强、续航时间长、任务连续性好等优势, 其运动过程涵盖地面移动、起飞、飞行与着陆等多个运动环节. 各模态下的精准运动控制及不同模态间的稳定转换, 是保障陆空多模态机器人高效、可靠执行探测与救援等任务的关键. 本文系统总结国内外陆空多模态机器人的近期研究, 阐述不同类型机器人的构型特点、驱动方式及运动机理. 在此基础上, 重点分析其在复杂地形下的障碍感知与稳定移动、非结构化环境中的自主稳定起飞、气流扰动下的稳定飞行与轨迹保持以及地面效应与触地冲击下的缓冲着陆等关键技术. 最后, 阐述陆空多模态机器人自主化与智能化运动面临的挑战及发展趋势.Abstract: Terrestrial-aerial multimodal robots demonstrate significant application potential in disaster rescue, special-purpose inspection, and extraterrestrial exploration, with the advantages of strong environmental adaptability, long operational endurance, and high task continuity. Their motion process can be divided into multiple phases, such as ground locomotion, takeoff, flight, and landing. Precise motion control under each modality and stable transitions between different modalities are key to ensuring that terrestrial-aerial multimodal robots can efficiently and reliably perform tasks such as exploration and rescue. This paper systematically reviews recent research on terrestrial-aerial multimodal robots at home and abroad, focusing on their configuration characteristics, actuation modes, and motion principles. On this basis, key technologies are analyzed in depth, including obstacle perception and stable locomotion over complex terrains, autonomous and stable takeoff in unstructured environments, stable flight and trajectory maintenance under airflow disturbances, and buffered landing under ground effect and touchdown impact. Finally, the challenges and emerging trends toward autonomous and intelligent motion for terrestrial-aerial multimodal robots are elaborated.
-
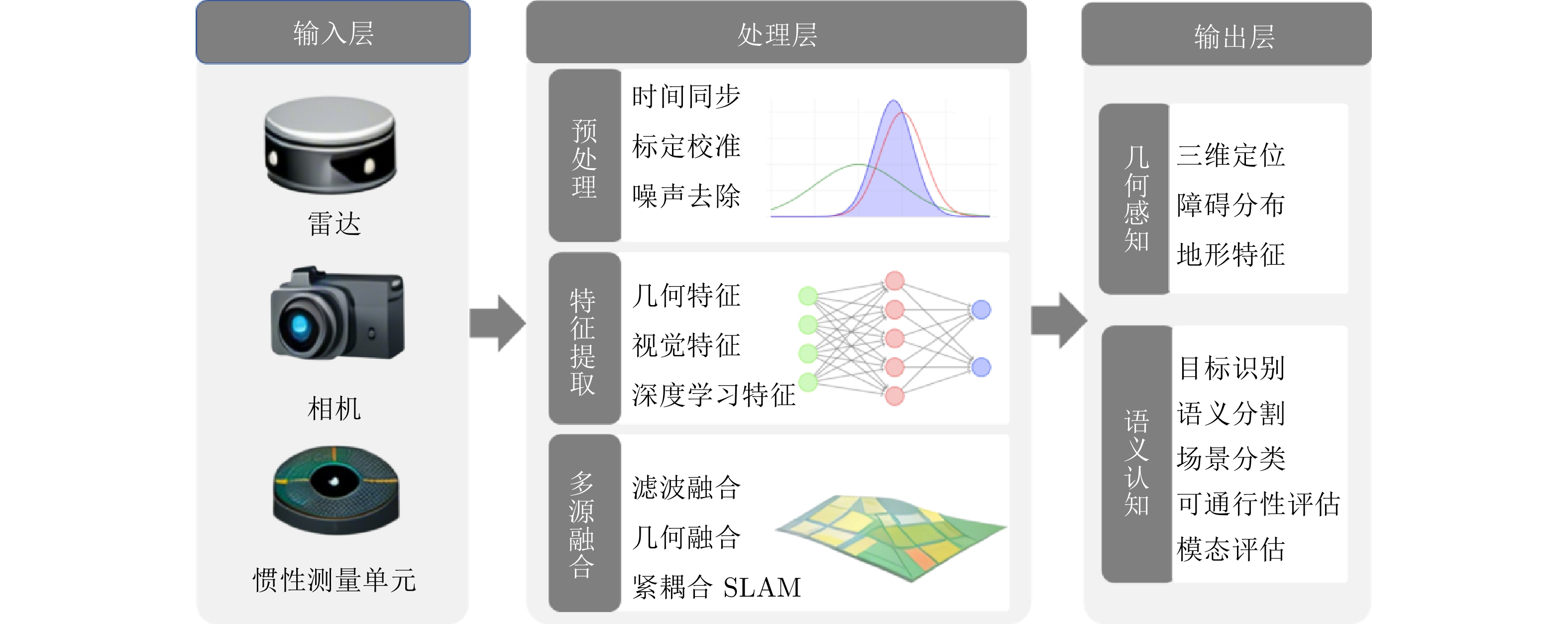
图 9 非结构化环境下的障碍感知与场景理解
Fig. 9 Obstacle perception and scene understanding in unstructured environments
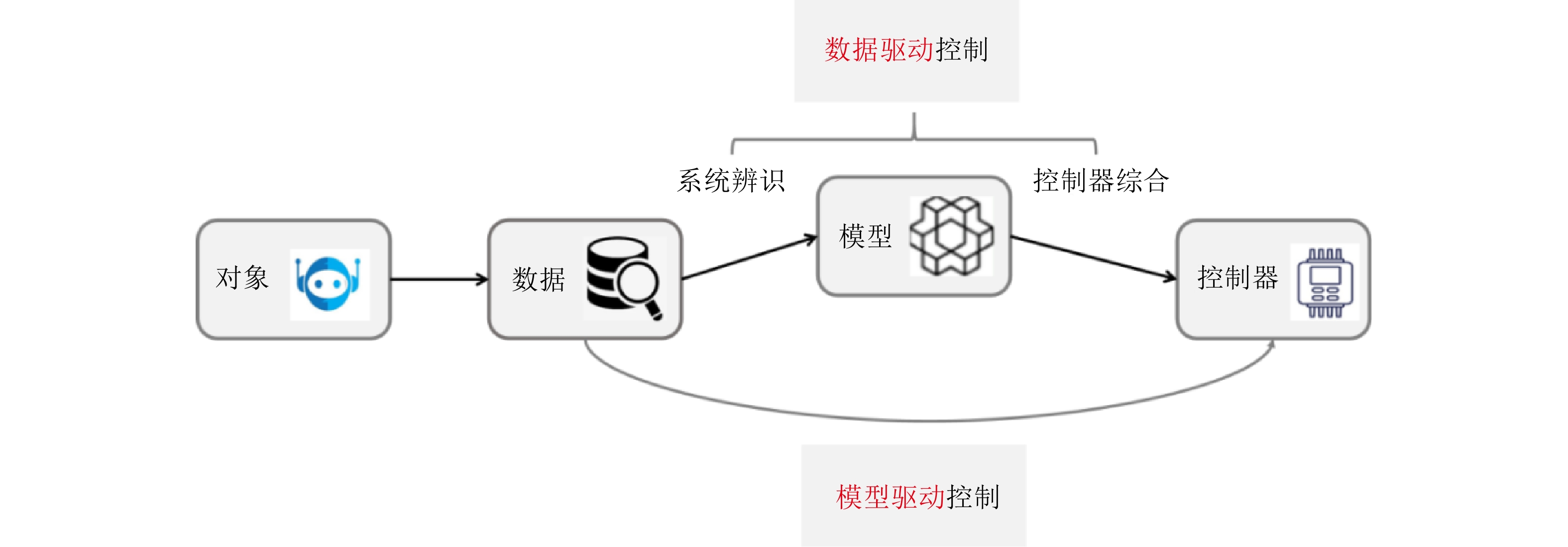
图 10 陆空多模态机器人陆地移动控制
Fig. 10 Land locomotion control of terrestrial-aerial multimodal robots
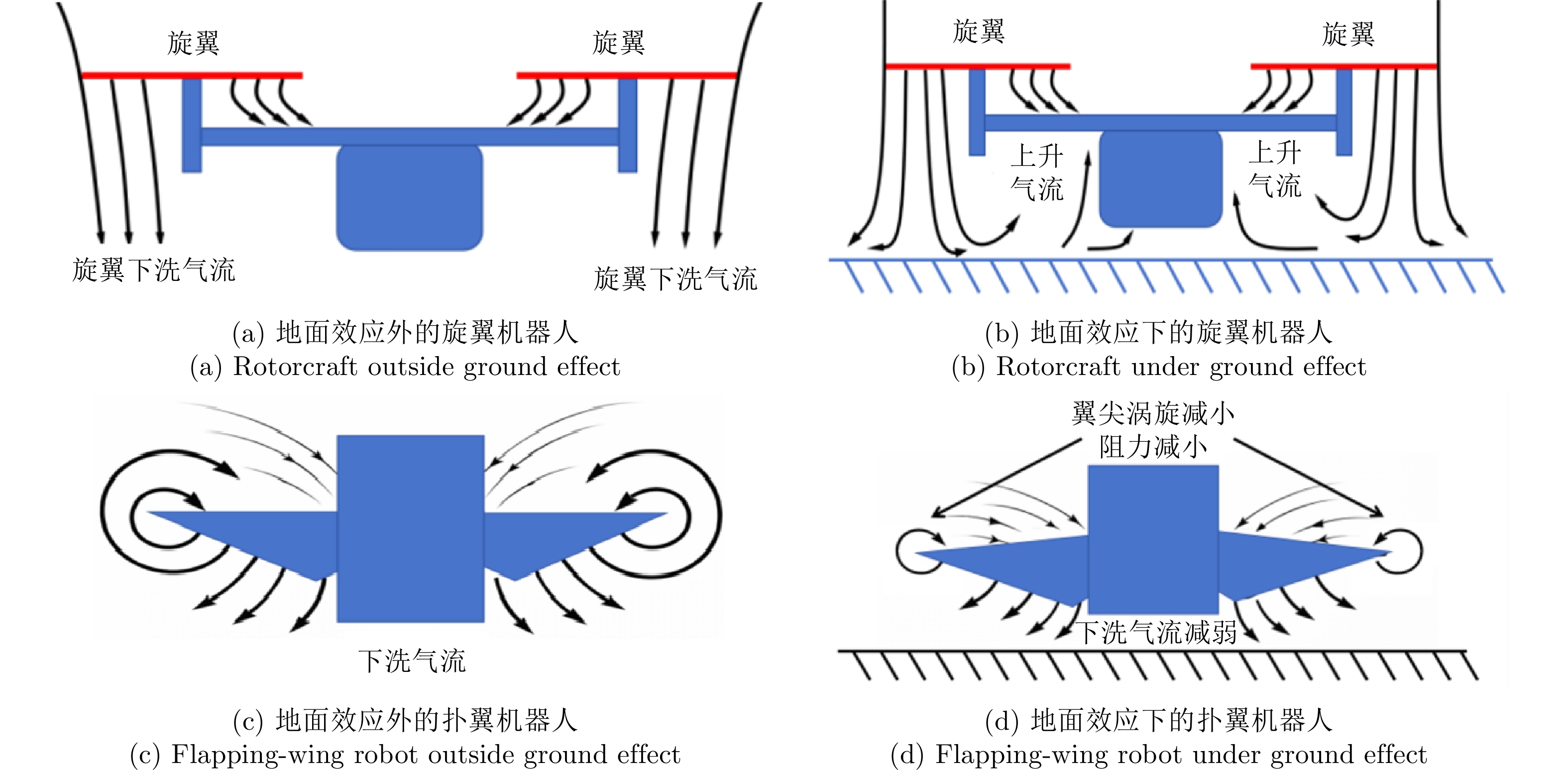
图 13 地面效应对陆空多模态机器人的影响
Fig. 13 Impact of ground effect on terrestrial-aerial multimodal robots

图 14 陆空多模态机器人着陆阶段缓冲设计
Fig. 14 Buffer design for landing stage of terrestrial-aerial multimodal robots
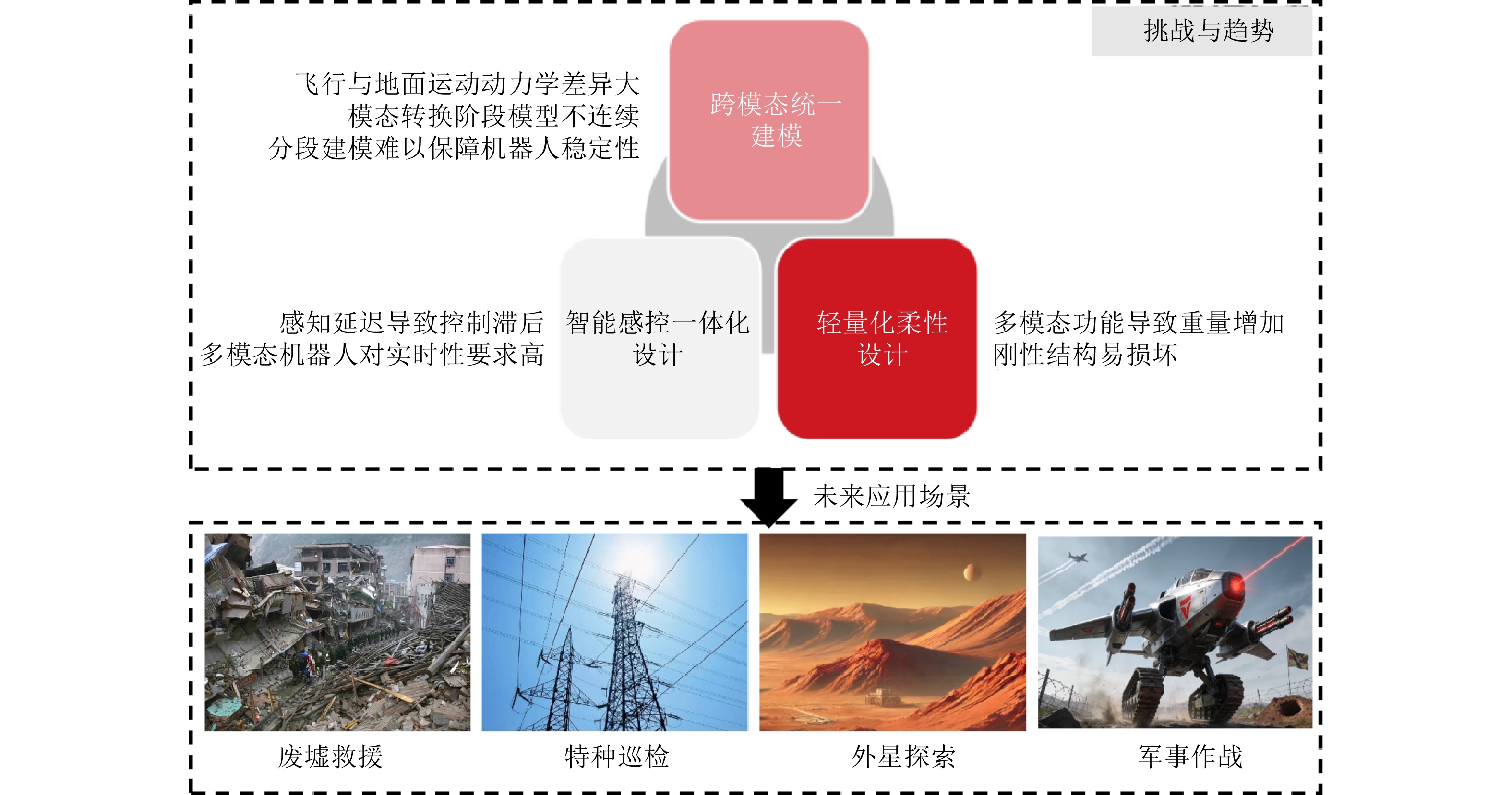
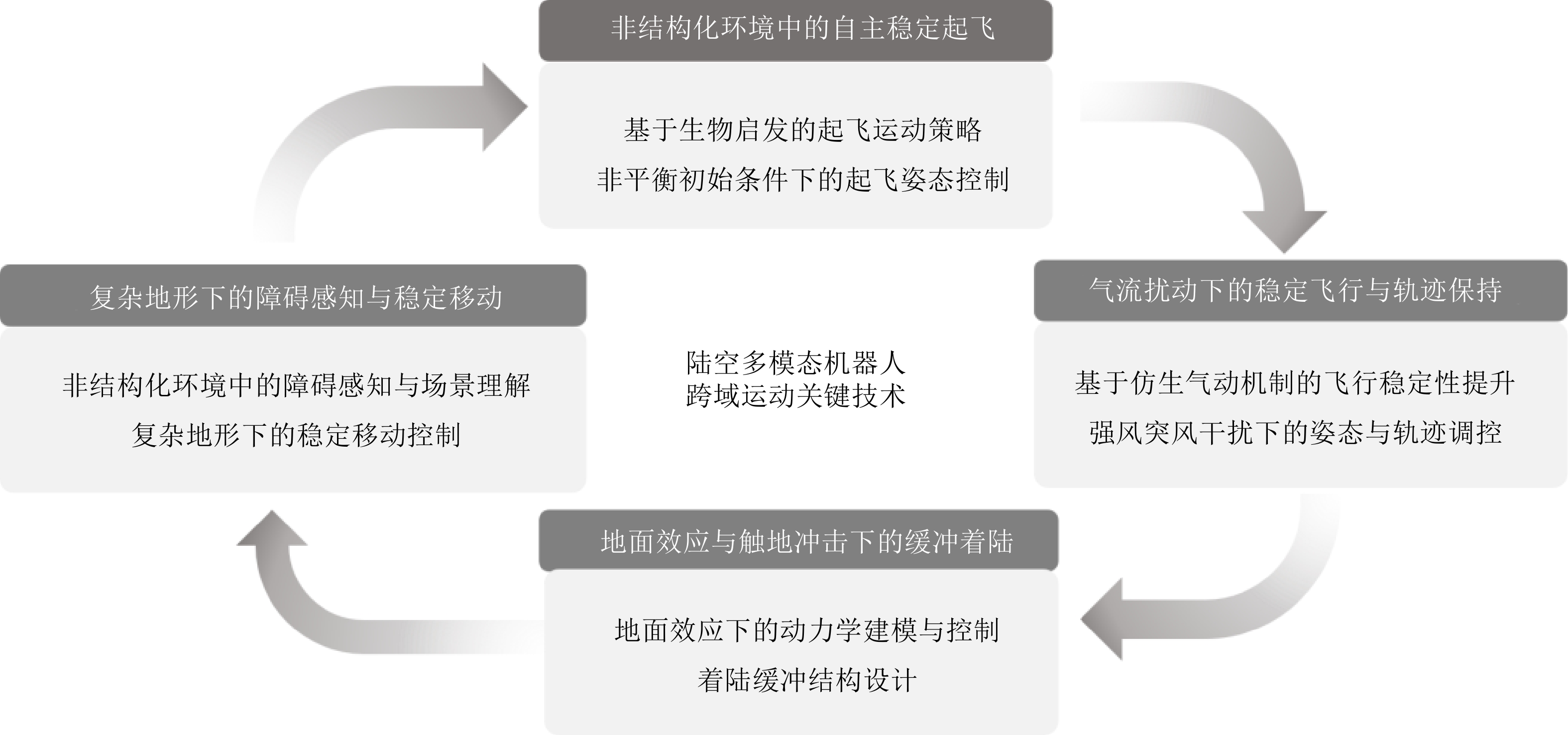
图 15 陆空多模态机器人挑战及发展方向
Fig. 15 Challenges and development direction of terrestrial-aerial multimodal robots
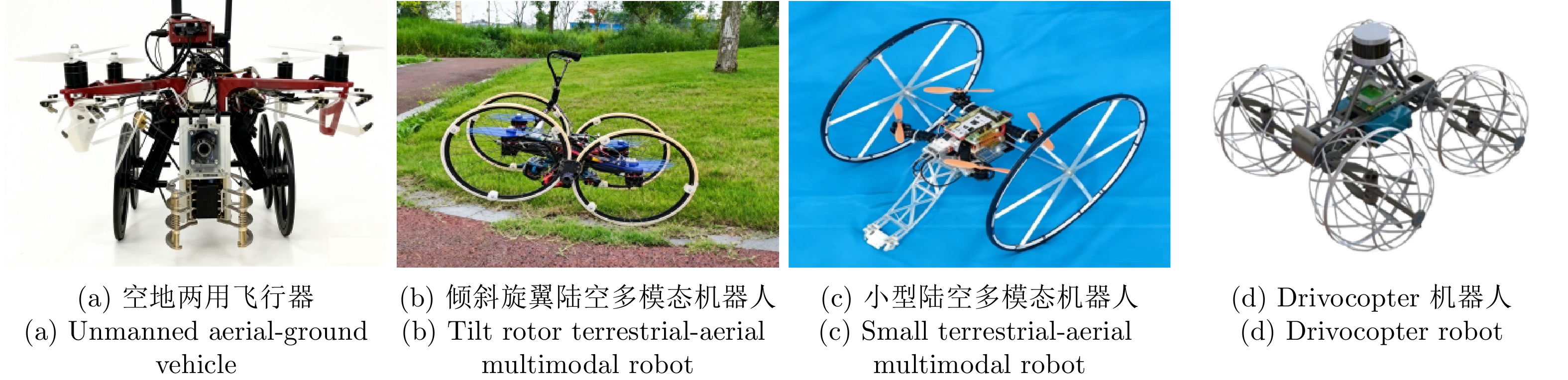
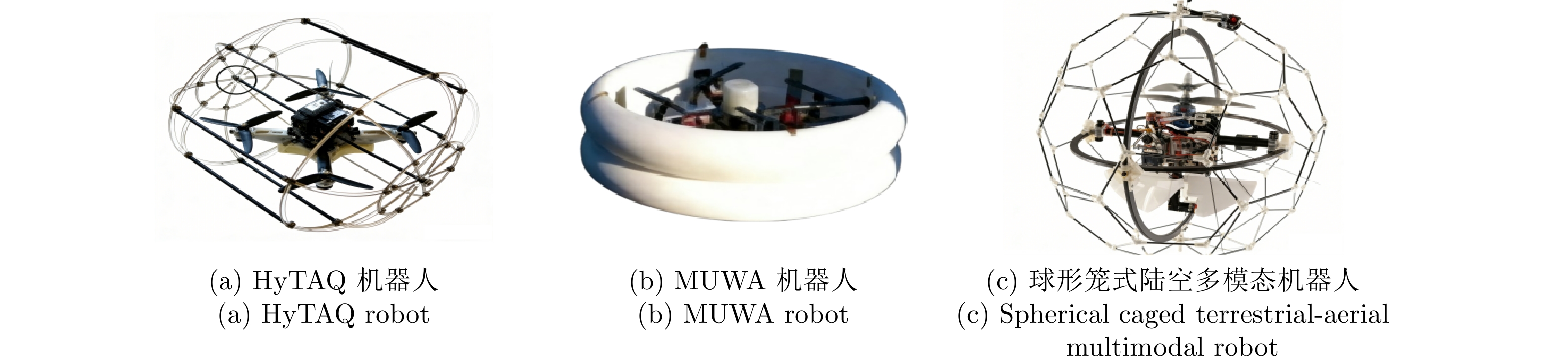
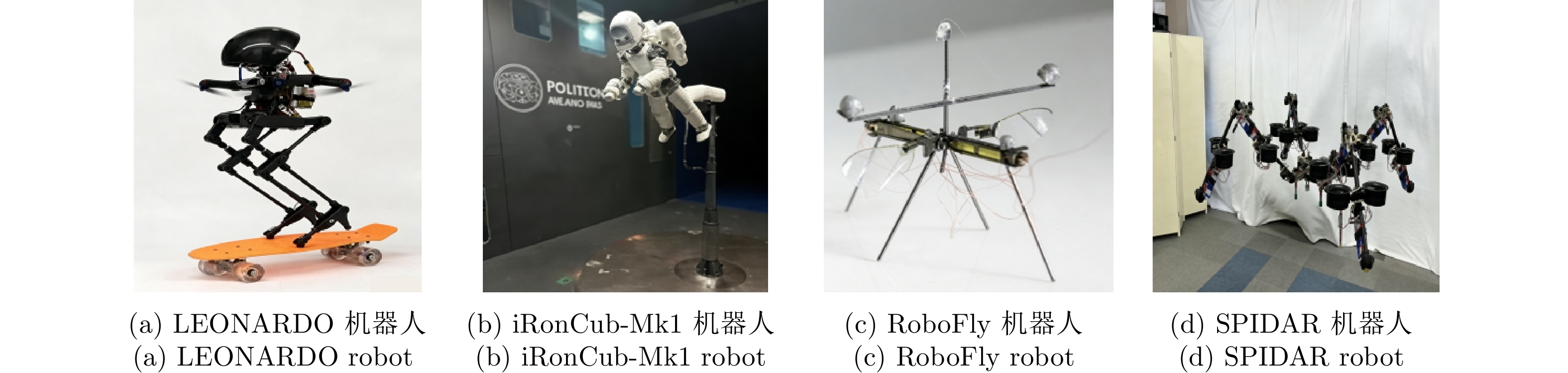
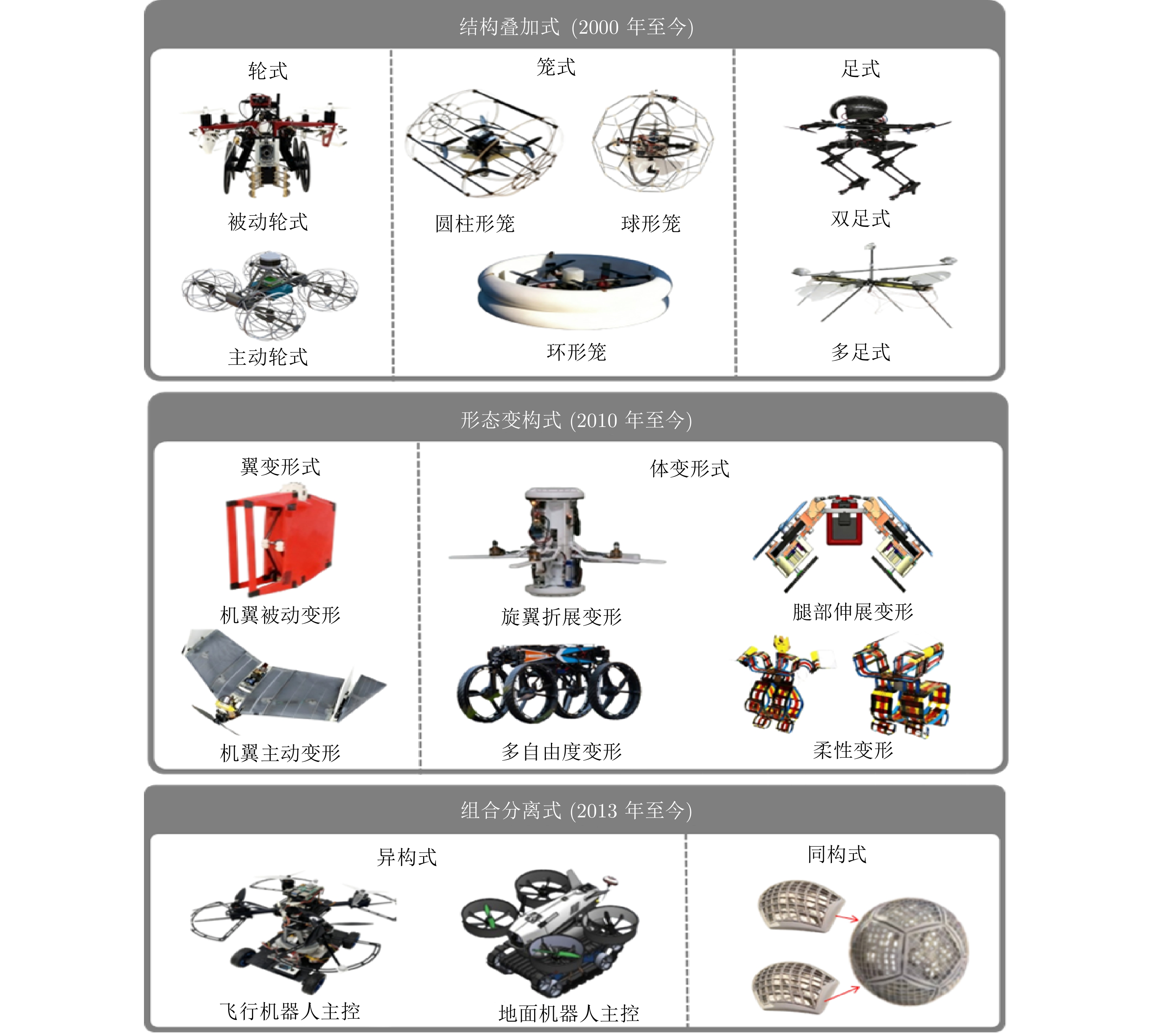
表 1 结构叠加式陆空多模态机器人分类及研究现状
Table 1 Classification and research status of superimposed-structure terrestrial-aerial multimodal robots
类别 优势 限制 运动特点 轮式 被动轮式 结构简单、轻量化、能耗低 控制精度低、机动性差 依赖旋翼推力分量驱动轮体滚动 主动轮式 机动性强、控制精度高 结构复杂、质量增加 轮组独立驱动, 可实现精确地面运动 笼式 圆柱形笼式 抗碰撞能力强 感知遮挡 旋翼推力驱动圆柱形笼实现地面滚动 环形笼式 结构轻质、可穿越狭窄环境 刚度有限、承载能力低 旋翼推力驱动环形笼实现地面滚动 球形笼式 运动解耦、抗冲击能力强 机构复杂、感知受限 外球壳滚动、内部飞行器姿态独立, 陆空运动解耦 足式 双足式 灵活性高、可执行精细操作 能耗高 可模拟人类步态, 完成攀爬、跨越等复杂动作 多足式 稳定性高、越障能力强 控制复杂 具备多点支撑结构, 可适应复杂地形  下载: 导出CSV
下载: 导出CSV
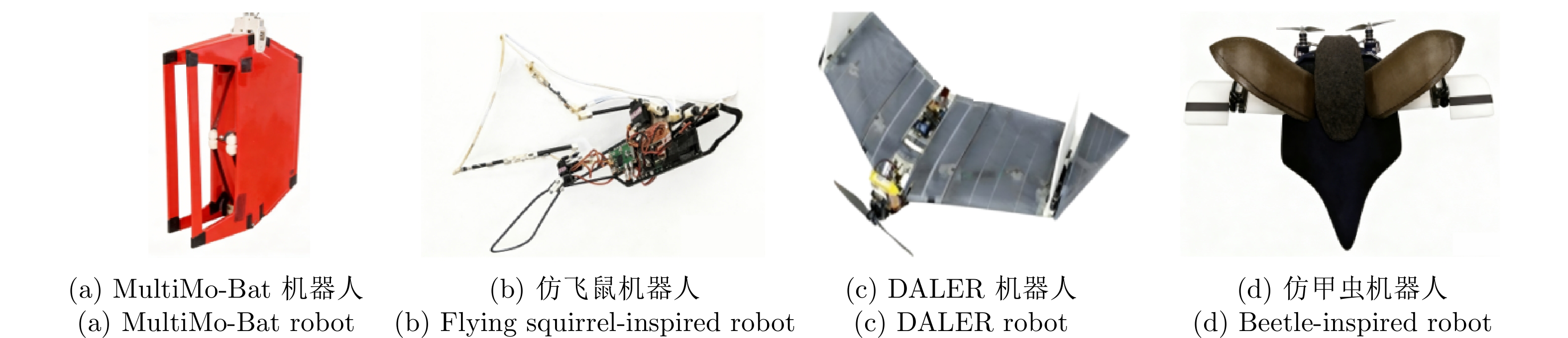
表 2 形态变构式陆空多模态机器人分类及研究现状
Table 2 Classification and research status of morphing reconfigurable terrestrial-aerial multimodal robots
类别 变形方式 优势 限制 翼变形式 机翼被动变形 模态转换连续性好、结构轻量化、气动稳定性较高 变形可控性有限、环境适应性受限 机翼主动变形 功能复用度高、结构集成度高、变形可控性好 机翼易受环境损伤、结构耐久性不足 体变形式 旋翼折展 结构紧凑、模态转换效率高 折展机构易疲劳、长期可靠性不足 腿部伸展 空间适应性强、具备壁面运动能力 机构复杂、控制耦合度高 多自由度变形 形态灵活、运动模态丰富、环境适应性强 控制复杂、系统能耗较高 柔性变形 柔顺性好、可穿越狭窄空间 控制精度有限、承载能力有限
下载: 导出CSV
表 3 组合分离式陆空多模态机器人分类及研究现状
Table 3 Classification and research status of composite separated terrestrial-aerial multimodal robots
分类 组合方式 组合体控制 优势 限制 对接方式 异构组合分离式 飞行机器人与地面机器人组合而成 飞行机器人主导, 地面机器人
被动的主从控制快速部署、
作业范围大载荷有限、
续航时间短被动磁对接、
螺旋自旋对接机构对接地面机器人主导, 飞行机器人
被动的主从控制强承载力 地面机动性限制 固定收纳结构与伸缩连接机构 同构组合分离式 多个相同的机器人组成 群体协同控制 形态灵活、
适应性强成本高、
能源管理复杂永久电磁铁对接
下载: 导出CSV
表 4 复杂地形下的障碍感知与稳定移动相关研究
Table 4 Research on obstacle perception and stable locomotion over complex terrains
运动环节 关键问题 技术内容 主要方法 陆地移动 非结构化环境中的障碍感知与场景理解 在地形多变、遮挡严重、噪声干扰强的条件下, 通过多传感器融合与深度学习, 实现对环境的全面感知、语义理解与精确建模 多源异构传感器轻量级融合[67]
多传感器SLAM与紧耦合滤波[68]
基于CNN的特征提取与可通行性评估[69]
双分支神经网络结构[70]
基于YOLOv4的语义感知与三维目标定位[71]复杂地形下的稳定移动控制 针对复杂地形下支撑面刚度、摩擦等参数时变且难以精确建模的问题, 融合模型驱动与数据驱动方法提高控制系统的稳定性、自适应性与鲁棒性 比例−积分−微分控制 + 线性化动态反馈[73]
接触隐式模型预测控制结合在线残差学习[74]
结合神经网络的数据驱动控制[76−77]
下载: 导出CSV
表 5 非结构化环境中的自主稳定起飞相关研究
Table 5 Research on autonomous and stable takeoff in unstructured environments
下载: 导出CSV
表 6 气流扰动下的稳定飞行与轨迹保持相关研究
Table 6 Research on stable flight and trajectory maintenance under airflow disturbances
下载: 导出CSV
表 7 地面效应与触地冲击下的缓冲着陆相关研究
Table 7 Research on buffered landing under ground effect and touchdown impact
下载: 导出CSV
-
[1] Wang Y T, Chen W W, Luan T H, Su Z, Xu Q C, Li R D, et al. Task offloading for post-disaster rescue in unmanned aerial vehicles networks. IEEE/ACM Transactions on Networking, 2022, 30(4): 1525−1539 doi: 10.1109/TNET.2022.3140796 [2] Tang C, Du B Y, Jiang S W, Dong X G, Liu X J, Zhao H C. A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale. Science Robotics, 2022, 7(66): Article No. eabm8597 doi: 10.1126/scirobotics.abm8597 [3] Chien S A, Visentin G, Basich C. Exploring beyond Earth using space robotics. Science Robotics, 2024, 9(91): Article No. eadi6424 doi: 10.1126/scirobotics.adi6424 [4] Zhou X, Wen X Y, Wang Z P, Gao Y M, Li H J, Wang Q H, et al. Swarm of micro flying robots in the wild. Science Robotics, 2022, 7(66): Article No. eabm5954 doi: 10.1126/scirobotics.abm5954 [5] Zhang E Z, Sun R Y, Pang Z X, Liu S. Obstacle capability of an air-ground amphibious reconnaissance robot with a planetary wheel-leg type structure. Applied Bionics and Biomechanics, 2021, 2021: Article No. 7925707 doi: 10.1155/2021/7925707 [6] Feng W W, Sun L, Jin Z K, Chen L L, Liu Y C, Xu H, et al. A large-strain and ultrahigh energy density dielectric elastomer for fast moving soft robot. Nature Communications, 2024, 15(1): Article No. 4222 doi: 10.1038/s41467-024-48243-y [7] Haarnoja T, Moran B, Lever G, Huang S H, Tirumala D, Humplik J, et al. Learning agile soccer skills for a bipedal robot with deep reinforcement learning. Science Robotics, 2024, 9(89): Article No. eadi8022 doi: 10.1126/scirobotics.adi8022 [8] Liu H R, Tian H M, Wang D R, Yuan T F, Zhang J Y, Liu G F, et al. Electrically active smart adhesive for a perching-and-takeoff robot. Science Advances, 2023, 9(43): Article No. eadj3133 doi: 10.1126/sciadv.adj3133 [9] 高良, 高靖松, 许威, 赵杰. 两栖类仿生机器人研究现状及发展前景. 机器人产业, 2023(4): 51−59 doi: 10.3969/j.issn.2096-0182.2023.04.009Gao Liang, Gao Jing-Song, Xu Wei, Zhao Jie. Research status and development prospects of amphibious bionic robots. Robot Industry, 2023(4): 51−59 doi: 10.3969/j.issn.2096-0182.2023.04.009 [10] Liu C, Zhao J, Sun N Y. A review of collaborative air-ground robots research. Journal of Intelligent & Robotic Systems, 2022, 106(3): Article No. 60 doi: 10.1007/s10846-022-01756-4 [11] Ramirez J P, Hamaza S. Multimodal locomotion: Next generation aerial-terrestrial mobile robotics. Advanced Intelligent Systems, 2025, 7(7): Article No. 2300327 doi: 10.1002/aisy.202300327 [12] Michelson R C. Entomopter and Method for Using Same, U.S. Patent 6082671A, July 2000 [13] Kossett A, D'Sa R, Purvey J, Papanikolopoulos N. Design of an improved land/air miniature robot. In: Proceedings of the IEEE International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. 632−637 [14] Nagatani K, Akiyama K, Yamauchi G, Otsuka H, Nakamura T, Kiribayashi S, et al. Volcanic ash observation in active volcano areas using teleoperated mobile robots-introduction to our robotic-volcano-observation project and field experiments. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Linköping, Sweden: IEEE, 2013. 1−46 [15] 黄强, 孟非, 余张国, 林德福, 徐彬, 朵英贤. 陆空协同多模态智能机器人系统发展战略研究. 中国工程科学, 2021, 23(5): 116−121 doi: 10.15302/J-SSCAE-2021.05.015Huang Qiang, Meng Fei, Yu Zhang-Guo, Lin De-Fu, Xu Bin, Duo Ying-Xian. Development strategy for air-ground collaborative multi-modal intelligent robot system. Strategic Study of CAE, 2021, 23(5): 116−121 doi: 10.15302/J-SSCAE-2021.05.015 [16] Tagliavini L, Colucci G, Botta A, Cavallone P, Baglieri L, Quaglia G. Wheeled mobile robots: State of the art overview and kinematic comparison among three omnidirectional locomotion strategies. Journal of Intelligent & Robotic Systems, 2022, 106(3): Article No. 57 doi: 10.1007/s10846-022-01745-7 [17] Amertet S, Gebresenbet G, Alwan H M. Optimizing the performance of a wheeled mobile robots for use in agriculture using a linear-quadratic regulator. Robotics and Autonomous Systems, 2024, 174: Article No. 104642 doi: 10.1016/j.robot.2024.104642 [18] Page J R, Pounds P E I. The quadroller: Modeling of a UAV/UGV hybrid quadrotor. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 4834−4841 [19] Ootsuka M, Premachandra C, Kato K. Development of an air-ground operational robot and its fundamental controlling approach. In: Proceedings of the Joint 7th International Conference on Soft Computing and Intelligent Systems (SCIS) and 15th International Symposium on Advanced Intelligent Systems (ISIS). Kitakyushu, Japan: IEEE, 2014. 1470−1474 [20] Mishra S, Patnaik K, Garrard Y, Chase Z, Ploughe M, Zhang W L. Ground trajectory control of an unmanned aerial-ground vehicle using thrust vectoring for precise grasping. In: Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Boston, USA: IEEE, 2020. 1270−1275 [21] Li B B, Ma L, Wang D, Sun Y K. Driving and tilt-hovering-an agile and manoeuvrable aerial vehicle with tiltable rotors. IET Cyber-Systems and Robotics, 2021, 3(2): 103−115 doi: 10.1049/csy2.12014 [22] Zhang D X, Guo C, Ren H R, Zhu P M, Xu M, Lu H M. The design of an aerial/ground dual-modal mobile robot for exploring complex environments. In: Proceedings of the IEEE International Conference on Real-Time Computing and Robotics (RCAR). Xining, China: IEEE, 2021. 393−398 [23] Tanaka K, Zhang D, Inoue S, Kasai R, Yokoyama H, Shindo K, et al. A design of a small mobile robot with a hybrid locomotion mechanism of wheels and multi-rotors. In: Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA). Takamatsu, Japan: IEEE, 2017. 1503−1508 [24] Kalantari A, Touma T, Kim L, Jitosho R, Strickland K, Lopez B T, et al. Drivocopter: A concept hybrid aerial/ground vehicle for long-endurance mobility. In: Proceedings of the IEEE Aerospace Conference. Big Sky, USA: IEEE, 2020. 1−10 [25] Lee J, Bjelonic M, Reske A, Wellhausen L, Miki T, Hutter M. Learning robust autonomous navigation and locomotion for wheeled-legged robots. Science Robotics, 2024, 9(89): Article No. eadi9641 doi: 10.1126/scirobotics.adi9641 [26] Mizutani S, Okada Y, Salaan C J, Ishii T, Ohno K, Tadokoro S. Proposal and experimental validation of a design strategy for a UAV with a passive rotating spherical shell. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hamburg, Germany: IEEE, 2015. 1271−1278 [27] Kalantari A, Spenko M. Design and experimental validation of HyTAQ, a hybrid terrestrial and aerial quadrotor. In: Proceedings of the IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013. 4445−4450 [28] Kawasaki K, Zhao M J, Okada K, Inaba M. MUWA: Multi-field universal wheel for air-land vehicle with quad variable-pitch propellers. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 1880−1885 [29] Briod A, Kornatowski P, Zufferey J C, Floreano D. A collision-resilient flying robot. Journal of Field Robotics, 2014, 31(4): 496−509 [30] Guo Z Y, Zhu Y D, Li T, Wang M L, Xu L S, Wang Y C. Design and control research of a triphibious robot based on rotors. In: Proceedings of the IEEE 9th International Conference on Software Engineering and Service Science (ICSESS). Bei-jing, China: IEEE, 2018. 454−459 [31] Arm P, Waibel G, Preisig J, Tuna T, Zhou R Y, Bickel V, et al. Scientific exploration of challenging planetary analog environments with a team of legged robots. Science Robotics, 2023, 8(80): Article No. eade9548 doi: 10.1126/scirobotics.ade9548 [32] Mikolajczyk T, Mikołajewska E, Al-Shuka H F N, Malinowski T, Kłodowski A, Pimenov D Y, et al. Recent advances in bipedal walking robots: Review of gait, drive, sensors and control systems. Sensors, 2022, 22(12): Article No. 4440 doi: 10.3390/s22124440 [33] Kim K, Spieler P, Lupu E S, Ramezani A, Chung S J. A bipedal walking robot that can fly, slackline, and skateboard. Science Robotics, 2021, 6(59): Article No. eabf8136 doi: 10.1126/scirobotics.abf8136 [34] Paolino A, Nava G, di Natale F, Bergonti F, Vanteddu P R, Grassi D, et al. Learning aerodynamics for the control of flying humanoid robots. Communications Engineering, 2025, 4(1): Art-icle No. 111 doi: 10.1038/s44172-025-00447-w [35] Coelho J, Ribeiro F, Dias B, Lopes G, Flores P. Trends in the control of hexapod robots: A survey. Robotics, 2021, 10(3): Article No. 100 doi: 10.3390/robotics10030100 [36] Chen Y F, Wang H Q, Helbling E F, Jafferis N T, Zufferey R, Ong A, et al. A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot. Science Robotics, 2017, 2(11): Article No. eaao5619 doi: 10.1126/scirobotics.aao5619 [37] Chukewad Y M, James J, Singh A, Fuller S. RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion. IEEE Transactions on Robotics, 2021, 37(6): 2025−2040 doi: 10.1109/TRO.2021.3075374 [38] Zhao M J. Aerial grasping by multi-limbed flying robot SPIDAR based on vectored thrust control. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Atlanta, USA: IEEE, 2025. 5202−5208 [39] Sui T T, Zou T. A review of bat-inspired shape morphing robotic design. Journal of Mechanisms and Robotics, 2022, 14(5): Article No. 050801 doi: 10.1115/1.4053686 [40] Yeh S I, Chiang C H. The influence of wing membrane elasticity on aerodynamics in a bat-inspired flapping robot. Biomimetics, 2025, 10(3): Article No. 161 doi: 10.3390/biomimetics10030161 [41] Kang J G, Lee D, Han S. A highly maneuverable flying squirrel drone with controllable foldable wings. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. 6652−6659 [42] Woodward M A, Sitti M. MultiMo-Bat: A biologically inspired integrated jumping-gliding robot. The International Journal of Robotics Research, 2014, 33(12): 1511−1529 doi: 10.1177/0278364914541301 [43] 王涵斌, 贺曦, 王晋军. 柔性翼气动力和变形特性的实验研究. 北京航空航天大学学报, 2022, 48(4): 665−673Wang Han-Bin, He Xi, Wang Jin-Jun. Experimental study on aerodynamic and deformation characteristics of flexible membrane wing. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(4): 665−673 [44] Shin W D, Park J J, Park H W. Bio-inspired design of a gliding-walking multi-modal robot. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018. 8158−8164 [45] Daler L, Lecoeur J, Hählen P B, Floreano D. A flying robot with adaptive morphology for multi-modal locomotion. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 1361−1366 [46] Daler L, Mintchev S, Stefanini C, Floreano D. A bioinspired multi-modal flying and walking robot. Bioinspiration & Biomimetics, 2015, 10(1): Article No. 016005 doi: 10.1088/1748-3190/10/1/016005 [47] Daler L. Adaptive Morphology for Multi-modal Locomotion [Ph.D. dissertation], École Polytechnique Fédérale de Lausanne, Switzerland, 2015. [48] Vourtsis C, Stewart W, Floreano D. Robotic elytra: Insect-inspired protective wings for resilient and multi-modal drones. IEEE Robotics and Automation Letters, 2022, 7(1): 223−230 doi: 10.1109/LRA.2021.3123378 [49] Morton S, Papanikolopoulos N. A small hybrid ground-air vehicle concept. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 5149−5154 [50] Kossett A, Papanikolopoulos N. A robust miniature robot design for land/air hybrid locomotion. In: Proceedings of the IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011. 4595−4600 [51] Meiri N, Zarrouk D. Flying STAR, a hybrid crawling and flying sprawl tuned robot. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 5302−5308 [52] Zarrouk D, Yehezkel L. Rising STAR: A highly reconfigurable sprawl tuned robot. IEEE Robotics and Automation Letters, 2018, 3(3): 1888−1895 doi: 10.1109/LRA.2018.2805165 [53] David N B, Zarrouk D. Design and analysis of FCSTAR, a hybrid flying and climbing sprawl tuned robot. IEEE Robotics and Automation Letters, 2021, 6(4): 6188−6195 doi: 10.1109/LRA.2021.3077851 [54] Sihite E, Kalantari A, Nemovi R, Ramezani A, Gharib M. Multi-modal mobility morphobot (M4) with appendage repurposing for locomotion plasticity enhancement. Nature Communications, 2023, 14(1): 3323 doi: 10.1038/s41467-023-39018-y [55] Fabris A, Aucone E, Mintchev S. Crash 2 squash: An autonomous drone for the traversal of narrow passageways. Advanced Intelligent Systems, 2022, 4(11): Article No. 2200113 doi: 10.1002/aisy.202200113 [56] 陶子辰, 刘松源, 桂昀, 郝思远, 方浩, 杨庆凯. 张拉整体跨域机器人的设计与控制. 机器人, 2025, 47(3): 338−347Tao Zi-Chen, Liu Song-Yuan, Gui Yun, Hao Si-Yuan, Fang Hao, Yang Qing-Kai. Design and control of tensegrity based cross-domain robot. Robot, 2025, 47(3): 338−347 [57] Xu S W, Hu X N, Yang R X, Zang C Q, Li L, Xiao Y, et al. Transforming machines capable of continuous 3D shape morphing and locking. Nature Machine Intelligence, 2025, 7(5): 703−715 doi: 10.1038/s42256-025-01028-4 [58] Latscha S, Kofron M, Stroffolino M, Davis L, Merritt G, Piccoli M, et al. Design of a hybrid exploration robot for air and land deployment (H.E.R.A.L.D) for urban search and rescue applications. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 1868−1873 [59] Deng L X, Yang B Q, Dong X, Cui Y J, Gao Y Z, Li D C, et al. Self-spin enabled docking and detaching of a UAV-UGV system for aerial-terrestrial amphibious and independent locomotion. IEEE Robotics and Automation Letters, 2023, 8(5): 2454−2461 doi: 10.1109/LRA.2023.3254445 [60] Miao J, Zhao M H. System design and research of land air amphibious robots. In: Proceedings of the 7th International Conference on Electronics Technology (ICET). Chengdu, China: IEEE, 2024. 613−617 [61] Agha-Mohammadi A, Tagliabue A, Schneider S, Morrell B, Lunine J. The shapeshifter: A morphing, multi-agent, multi-modal robotic platform for the exploration of Titan. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). 2021. 12087−12094 [62] Zhou F, Jiao Z K, Shen G Q, Xing M D, Gashinova M. A multiangle MIMO-SAR fusion imaging method based on improved range migration algorithm and improved geographic information scale invariant feature transform algorithm. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2025, 18: 13938−13949 doi: 10.1109/JSTARS.2025.3573950 [63] Liang X X, Lin Y Q, Fu H Z, Zhu L, Li X M. RSCFed: Random sampling consensus federated semi-supervised learning. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA: IEEE, 2022. 10144−10153 [64] Díez-González J, Álvarez R, Prieto-Fernández N, Perez H. Local wireless sensor networks positioning reliability under sensor failure. Sensors, 2020, 20(5): Article No. 1426 doi: 10.3390/s20051426 [65] Xu X B, Zhang L, Yang J, Cao C F, Wang W, Ran Y Y, et al. A review of multi-sensor fusion SLAM systems based on 3D LIDAR. Remote Sensing, 2022, 14(12): Article No. 2835 doi: 10.3390/rs14122835 [66] Wang X, Li K Q, Chehri A. Multi-sensor fusion technology for 3D object detection in autonomous driving: A review. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(2): 1148−1165 doi: 10.1109/TITS.2023.3317372 [67] 魏慧, 张斌, 黄伯超, 徐浩桐, 罗杨, 许诺, 等. 陆空两栖多模态可变形机器人. 机器人, 2025, 47(3): 328−337 doi: 10.13973/j.cnki.robot.240334Wei Hui, Zhang Bin, Huang Bo-Chao, Xu Hao-Tong, Luo Yang, Xu Nuo, et al. Multi-mode transformable land-air amphibious robot. Robot, 2025, 47(3): 328−337 doi: 10.13973/j.cnki.robot.240334 [68] 王超. 基于多传感器融合SLAM的陆空路径规划算法研究与实现 [硕士学位论文], 电子科技大学, 中国, 2023.Wang Chao. Research and Implementation of Land and Air Path Planning Algorithm Based on Multi-sensor Fusion SLAM [Master thesis], University of Electronic Science and Technology of China, China, 2023. [69] Käslin R, Fankhauser P, Stumm E, Taylor Z, Mueggler E, Delmerico J, et al. Collaborative localization of aerial and ground robots through elevation maps. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Lausanne, Switzerland: IEEE, 2016. 284−290 [70] 谢宇飞. 陆空机器人地面控制系统的设计与实现 [硕士学位论文], 哈尔滨工业大学, 中国, 2023.Xie Yu-Fei. Design and Implementation of Ground Control System for Land-aerial Robots [Master thesis], Harbin Institute of Technology, China, 2023. [71] 肖朕. 陆空两栖机器人未知环境下自主探索算法研究 [硕士学位论文], 南京理工大学, 中国, 2023.Xiao Zhen. Research on Autonomous Exploration Algorithm for Land-air Amphibious Robots in Unknown Environments [Master thesis], Nanjing University of Science and Technology, China, 2023. [72] le Cleac'h S, Howell T A, Yang S, Lee C Y, Zhang J, Bishop A, et al. Fast contact-implicit model predictive control. IEEE Transactions on Robotics, 2024, 40: 1617−1629 doi: 10.1109/TRO.2024.3351554 [73] Pimentel M, Basiri M. A bimodal rolling-flying robot for micro level inspection of flat and inclined surfaces. IEEE Robotics and Automation Letters, 2022, 7(2): 5135−5142 doi: 10.1109/LRA.2022.3154027 [74] Huang W C, Aydinoglu A, Jin W X, Posa M. Adaptive contact-implicit model predictive control with online residual learning. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. 5822−5828 [75] Cao M Q, Xu X H, Yuan S H, Cao K, Liu K C, Xie L H. DoubleBee: A hybrid aerial-ground robot with two active wheels. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. 6962−6969 [76] Baggio G, Bassett D S, Pasqualetti F. Data-driven control of complex networks. Nature Communications, 2021, 12(1): Article No. 1429 doi: 10.1038/s41467-021-21554-0 [77] Xu X H, Yang Y Z, Cao M Q, Nguyen T M, Cao K, Xie L H. A data-driven control method for ground locomotion on sloped terrain of a hybrid aerial-ground robot. Journal of Automation and Intelligence, 2024, 3(4): 219−229 doi: 10.1016/j.jai.2024.08.001 [78] Li Q, Tan T, Wang B L, Yan Z M. Avian-inspired embodied perception in biohybrid flapping-wing robotics. Nature Communications, 2024, 15(1): Article No. 9099 doi: 10.1038/s41467-024-53517-6 [79] Shin W D, Phan H V, Daley M A, Ijspeert A J, Floreano D. Fast ground-to-air transition with avian-inspired multifunctional legs. Nature, 2024, 636(8041): 86−91 doi: 10.1038/s41586-024-08228-9 [80] Hammad A, Armanini S F. Landing and take-off capabilities of bioinspired aerial vehicles: A review. Bioinspiration & Biomimetics, 2024, 19(3): Article No. 031001 doi: 10.1088/1748-3190/ad3263 [81] Boria F J, Bachmann R J, Ifju P G, Quinn R D, Vaidyanathan R, Perry C, et al. A sensor platform capable of aerial and terrestrial locomotion. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, Canada: IEEE, 2005. 3959−3964 [82] Coleman D, Gakhar K, Benedict M, Tran J, Siroh J. Aeromechanics analysis of a hummingbird-like flapping wing in hover. Journal of Aircraft, 2018, 55(6): 2282−2297 doi: 10.2514/1.C034726 [83] Tu Z, Hui C, Liu L M, Zhou Y M, Romano D R, Deng X Y, et al. Crawl and fly: A bio-inspired robot utilizing unified actuation for hybrid aerial-terrestrial locomotion. IEEE Robotics and Automation Letters, 2021, 6(4): 7549−7556 doi: 10.1109/LRA.2021.3099246 [84] Dhingra D, Kaheman K, Fuller S B. Modeling and LQR control of insect sized flapping wing robot. npj Robotics, 2025, 3(1): Article No. 6 doi: 10.1038/s44182-025-00022-7 [85] Zhao F Z, Wang X F, Zhu T H. Power dynamic decoupling control of grid-forming converter in stiff grid. IEEE Transactions on Power Electronics, 2022, 37(8): 9073−9088 doi: 10.1109/TPEL.2022.3156991 [86] Li Y H, Zhou Y H, Huang J B, Wang Z J, Zhu S J, Wu K R, et al. Jet-HR2: A flying bipedal robot based on thrust vector control. IEEE Robotics and Automation Letters, 2022, 7(2): 4590−4597 doi: 10.1109/LRA.2022.3152231 [87] Zhu H, Fan W, Xu B, Yang C, Bai W Q, Qin Y C, et al. Adaptive take-off controller of a land-air amphibious vehicle on unstructured terrain. IEEE Transactions on Vehicular Technology, 2024, 73(2): 1817−1828 doi: 10.1109/TVT.2023.3319971 [88] Thorington J R W, Darrow K, Anderson C G. Wing tip anatomy and aerodynamics in flying squirrels. Journal of Mammalogy, 1998, 79(1): 245−250 doi: 10.2307/1382860 [89] Beck A, Zaitsev V, Ben H U, Kosa G, Ayali A, Weiss A, et al. Jump stabilization and landing control by wing-spreading of a locust-inspired jumper. Bioinspiration & Biomimetics, 2017, 12(6): Article No. 066006 doi: 10.1088/1748-3190/aa8ceb [90] Le T Q, van Truong T, Park S H, Quang T T, Ko J H, Park H C, et al. Improvement of the aerodynamic performance by wing flexibility and elytra-hind wing interaction of a beetle during forward flight. Journal of the Royal Society Interface, 2013, 10(85): Article No. 20130312 doi: 10.1098/rsif.2013.0312 [91] Halefom M H, Hopwood J W, Woolsey C A. Unsteady aerodynamics in model-based wind estimation from fixed-wing aircraft motion. Journal of Guidance, Control, and Dynamics, 2024, 47(8): 1556−1568 doi: 10.2514/1.G007836 [92] Qin G D, Xu Y Z, He W, Qi Q, Zheng L, Hu H M, et al. Design and development of an air-land amphibious inspection drone for fusion reactor. Drones, 2024, 8(5): Article No. 190 doi: 10.3390/drones8050190 [93] Fan W, Zhu H, Zhang Y B, Xu B, Xu T, Zhou X P, et al. Configuration optimization and adaptive controller design of a land-air amphibious vehicle for improved yaw capability. IEEE Transactions on Transportation Electrification, 2024, 10(4): 10006−10018 doi: 10.1109/TTE.2024.3381289 [94] Olivares D. Reinforcement Learning Based Control of a Fixed-wing UAV Under Wind Disturbances [Ph.D. dissertation], Université Paris-Saclay, France, 2025. [95] Chang Q, Yu B, Ji H W, Li H F, Yuan T T, Zhao X Y, et al. Design and control of a reconfigurable robot with rolling and flying locomotion. Actuators, 2024, 13(1): Article No. 27 doi: 10.3390/act13010027 [96] Tan Q F, Zhang X Y, Liu H P, Jiao S Y, Zhou M, Li J. Multimodal dynamics analysis and control for amphibious fly-drive vehicle. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 621−632 doi: 10.1109/TMECH.2021.3056095 [97] Matus-Vargas A, Rodriguez-Gomez G, Martinez-Carranza J. Ground effect on rotorcraft unmanned aerial vehicles: A review. Intelligent Service Robotics, 2021, 14(1): 99−118 doi: 10.1007/s11370-020-00344-5 [98] Boschetti P J, Neves C A, González P J. Nonlinear aerodynamic model in dynamic ground effect at high angles of attack. Journal of Aircraft, 2022, 59(6): 1500−1513 doi: 10.2514/1.C036721 [99] Wei H L, Lou B C, Zhang Z Z, Liang B H, Wang F Y, Lv C. Autonomous navigation for eVTOL: Review and future perspectives. IEEE Transactions on Intelligent Vehicles, 2024, 9(2): 4145−4171 doi: 10.1109/TIV.2024.3352613 [100] Mandralis I, Nemovi R, Ramezani A, Murray R M, Gharib M. ATMO: An aerially transforming morphobot for dynamic ground-aerial transition. Communications Engineering, 2025, 4(1): Article No. 74 doi: 10.1038/s44172-025-00413-6 [101] Hyun N S P, Chan C M, Hernandez A M, Wood R J. Sticking the landing: Insect-inspired strategies for safely landing flapping-wing aerial microrobots. Science Robotics, 2025, 10(101): Article No. eadq3059 doi: 10.1126/scirobotics.adq3059 [102] Choi H C, Wee I, Corah M, Sabet S, Kim T, Touma T, et al. BAXTER: Bi-modal aerial-terrestrial hybrid vehicle for long-endurance versatile mobility. Experimental Robotics. Cham, Switzerland: Springer, 2021. 60−72 [103] Yang B Q, Dong X, Li H Z, Zhang J H, Xiang J W, Li D C, et al. An ultralight air-ground vehicle capable of sustained amphibious maneuverability and bio-inspired modality transition. IEEE Robotics and Automation Letters, 2024, 9(11): 9351−9358 doi: 10.1109/LRA.2024.3460425 [104] Xu Y, Zhang W T, Peng L, Zhou Q J, Li Q, Shi Q. A locust-inspired robot capable of continuous crawl-jump-gliding locomotion with optimized transitional control. IEEE Transactions on Robotics, 2025, 41: 220−235 doi: 10.1109/TRO.2024.3502192 [105] Vidyasagar A, Zufferey J C, Floreano D, Kovač M. Performance analysis of jump-gliding locomotion for miniature robotics. Bioinspiration & Biomimetics, 2015, 10(2): Article No. 025006 doi: 10.1088/1748-3190/10/2/025006 [106] Siddall R, Byrnes G, Full R J, Jusufi A. Tails stabilize landing of gliding geckos crashing head-first into tree trunks. Communications Biology, 2021, 4: Article No. 1020 doi: 10.1038/s42003-021-02378-6 [107] van Truong T, Kim J, Kim M J, Park H C, Yoon K J, Byun D. Flow structures around a flapping wing considering ground effect. Experiments in Fluids, 2013, 54(7): Article No. 1575 doi: 10.1007/s00348-013-1575-6 [108] Zheng Z, Wang J, Wu Y Z, Cai Q F, Yu H, Zhang R B, et al . Roller-quadrotor: A novel hybrid terrestrial/aerial quadrotor with unicycle-driven and rotor-assisted turning. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. 6927−6934 [109] Paskins K E. The Mechanics and Energy Economy of Animal Jumping and Landing Applied to Autonomous Robots [Ph.D. dissertation], University of Bath, UK, 2007. [110] Paskins K E, Bowyer A, Megill W M, Scheibe J S. Take-off and landing forces and the evolution of controlled gliding in northern flying squirrels glaucomys sabrinus. Journal of Experimental Biology, 2007, 210(8): 1413−1423 doi: 10.1242/jeb.02747 [111] Gorgulu Y F, Ozgur M A. Aerodynamic enhancement of wind turbine blades through peregrine falcon-inspired surface designs. Environmental Progress & Sustainable Energy, 2025, 44(6): Article No. e70060 doi: 10.1002/ep.70060 [112] Jusufi A, Goldman D I, Revzen S, Full R J. Active tails enhance arboreal acrobatics in geckos. Proceedings of the National Academy of Sciences of the United States of America, 2008, 105(11): 4215−4219 doi: 10.1073/pnas.0711944105 [113] Ai B, Tian S P, Shi H C, Wang Y X, Pfaff T, Tan C, et al. A review of learning-based dynamics models for robotic manipulation. Science Robotics, 2025, 10(106): Article No. eadt1497 doi: 10.1126/scirobotics.adt1497 [114] Li Y Y, Wang Y Q, Liu Y, He J W, Fan L, Zhang Z X. End-to-end driving with online trajectory evaluation via BEV world model. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Honolulu, USA: IEEE, 2025. 27137−27146 [115] Xu M K, Powers A S, Dror R O, Ermon S, Leskovec J. Geometric latent diffusion models for 3D molecule generation. In: Proceedings of the 40th International Conference on Machine Learning (ICML). Honolulu, USA: PMLR, 2023. 38592−38610 [116] Reiser P, Neubert M, Eberhard A, Torresi L, Zhou C, Shao C, et al. Graph neural networks for materials science and chemistry. Communications Materials, 2022, 3(1): Article No. 93 doi: 10.1038/s43246-022-00315-6 [117] Qi Z, Meng L, Li Z C, Hu H, Meng X X. Cross-silo feature space alignment for federated learning on clients with imbalanced data. In: Proceedings of the 39th AAAI Conference on Artificial Intelligence. Philadelphia, USA: AAAI, 2025. 19986−19994 [118] Chen S J, Zhang Y, Yang Q. Multi-task learning in natural language processing: An overview. ACM Computing Surveys, 2024, 56(12): Article No. 295 [119] Vettoruzzo A, Bouguelia M R, Vanschoren J, Rögnvaldsson T, Santosh K C. Advances and challenges in meta-learning: A technical review. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(7): 4763−4779 doi: 10.1109/TPAMI.2024.3357847 [120] Domínguez-Vidal J E, Rodríguez N, Sanfeliu A. Perception-intention-action cycle in human-robot collaborative tasks: The collaborative lightweight object transportation use-case. International Journal of Social Robotics, 2025, 17(10): 1927−1956 [121] Shi L, Li B C, Matusik W. End-to-end learning of 3D phase-only holograms for holographic display. Light: Science & Applications, 2022, 11(1): Article No. 247 doi: 10.1038/s41377-022-00894-6 [122] Janson G, Valdes-Garcia G, Heo L, Feig M. Direct generation of protein conformational ensembles via machine learning. Nature Communications, 2023, 14(1): Article No. 774 doi: 10.1038/s41467-023-36443-x [123] Rani V, Nabi S T, Kumar M, Mittal A, Kumar K. Self-supervised learning: A succinct review. Archives of Computational Methods in Engineering, 2023, 30(4): 2761−2775 doi: 10.1007/s11831-023-09884-2 [124] Welte E, Rayyes R. Interactive imitation learning for dexterous robotic manipulation: Challenges and perspectives——A survey. Frontiers in Robotics and AI, 2025, 12: Article No. 1682437 doi: 10.3389/frobt.2025.1682437 [125] Morilla-Cabello D, Westheider J, Popović M, Montijano E. Perceptual factors for environmental modeling in robotic active perception. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. 4605−4611 [126] Qian C, Kaminer I, Chen H S. A guidance to intelligent metamaterials and metamaterials intelligence. Nature Communications, 2025, 16(1): Article No. 1154 doi: 10.1038/s41467-025-56122-3 [127] Chen C, Shi P J, Liu Z X, Duan S D, Si M Q, Zhang C W, et al. Advancing physical intelligence for autonomous soft robots. Science Robotics, 2025, 10(102): Article No. eads1292 doi: 10.1126/scirobotics.ads1292 -

 下载:
下载:


计量
- 文章访问数: 495
- HTML全文浏览量: 273
- PDF下载量: 137
- 被引次数: 0
