

Design and Performance Study of a Biomimetic Soft Crawling Robot With Multiple Motion Modes
-
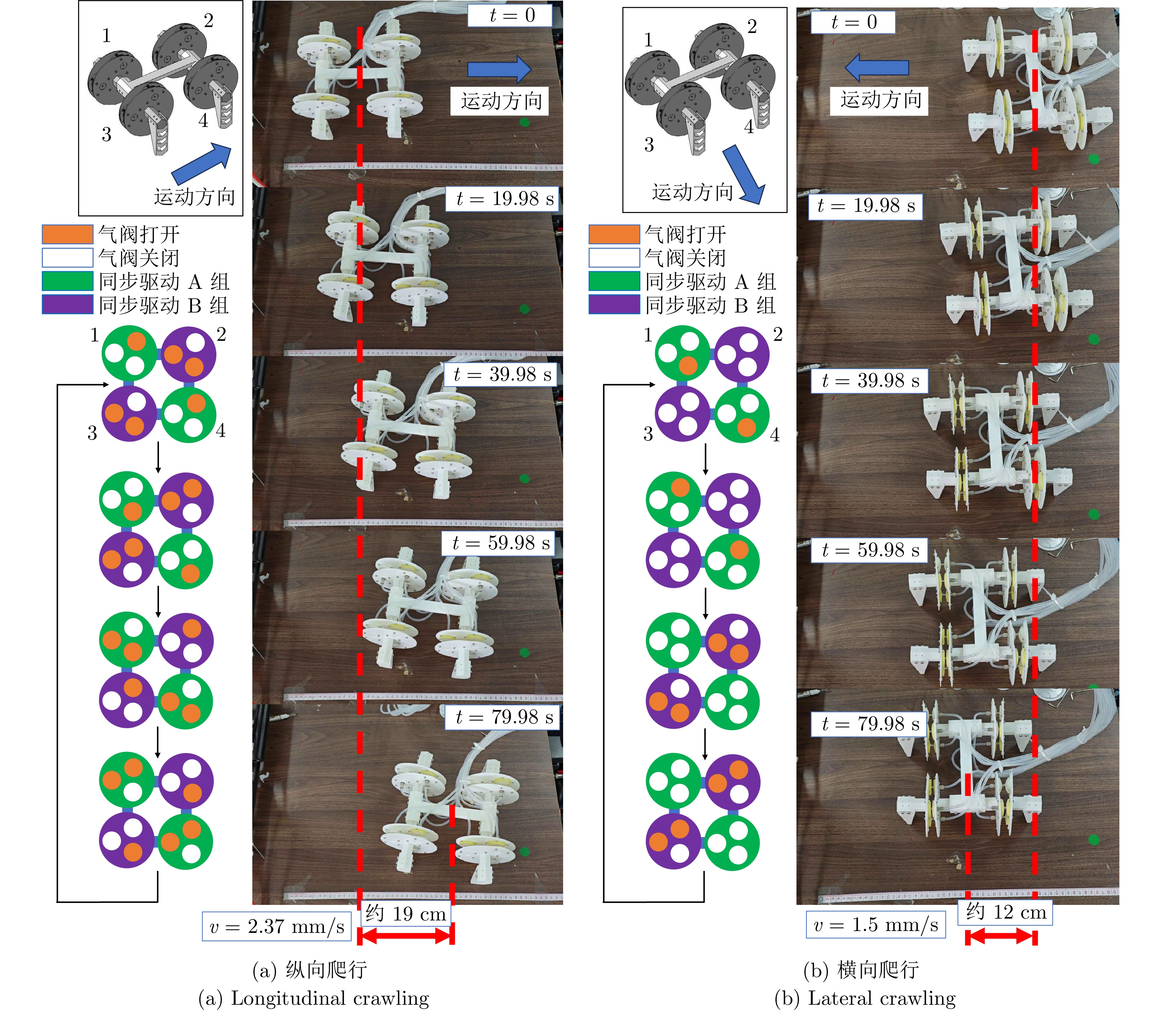
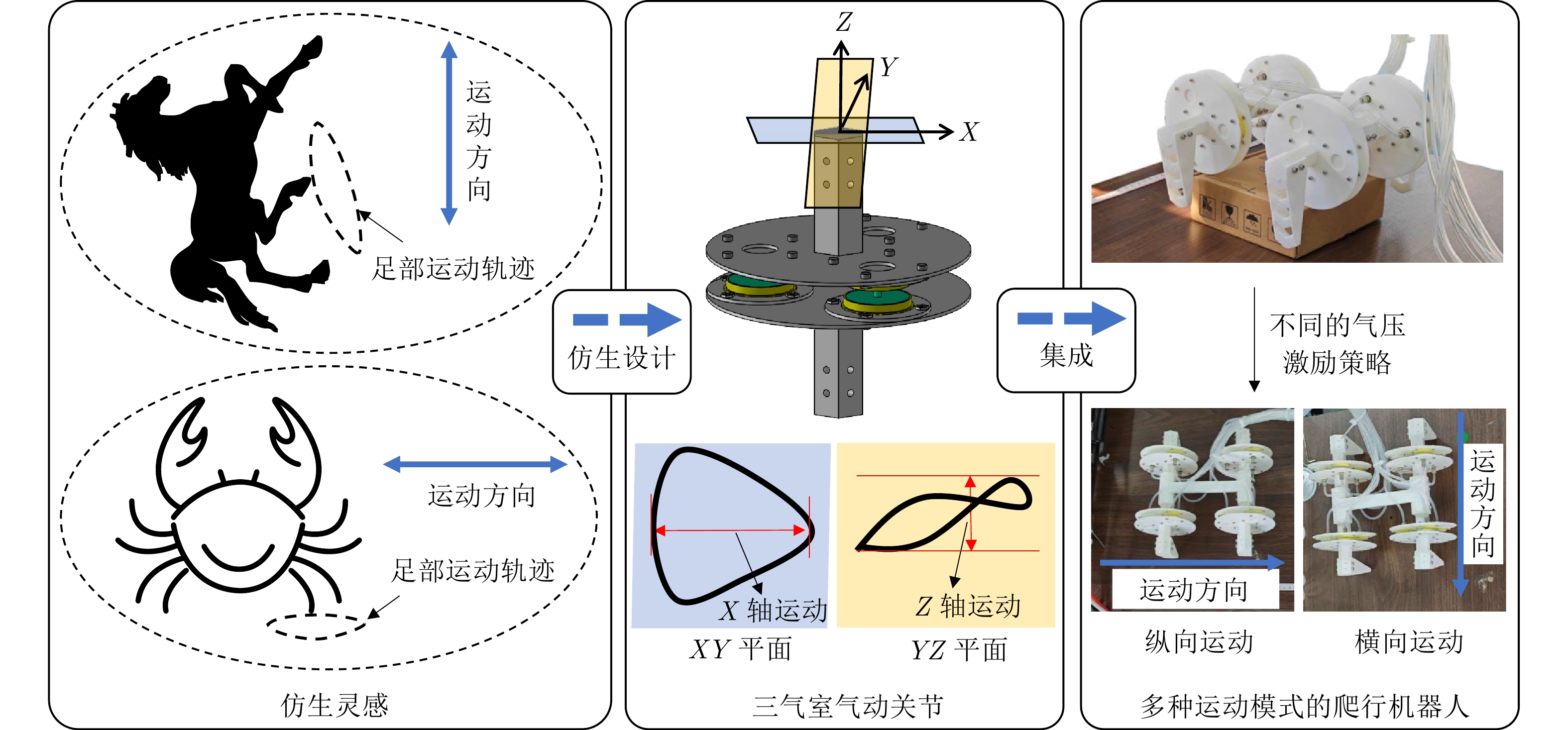
摘要: 仿生关节结构和多模式爬行机器人对复杂环境下的柔顺运动具有重要意义. 针对现有爬行机器人运动模式单一的问题, 首先设计一种受章鱼触腕肌肉结构启发的三腔气动关节. 该关节实现模块化设计和三维空间的差异化轨迹运动. 基于该关节提出并研制一种兼具多种运动模式的仿生爬行机器人. 通过选择不同的气压激励方式, 机器人在同一平台上实现类似蜥蜴的纵向爬行和类似螃蟹的横向爬行, 分别实现142.54 mm/min和90.02 mm/min的移动速度. 本文围绕关节设计原理、结构实现、制造工艺及机器人集成与运动验证进行系统研究, 为气动关节设计和多模式仿生爬行机器人的开发提供新的技术途径.Abstract: Biomimetic joint structures and crawling robots with multiple motion modes play an important role in achieving compliant locomotion in complex environments. To address the limitation of single-mode locomotion in existing crawling robots, this study first designs a three-chamber pneumatic joint inspired by the muscular structure of octopus arms. The joint features a modular design and enables differential trajectory motion in three-dimensional space. Based on this joint, a biomimetic crawling robot with multiple locomotion modes has been designed and developed. By selecting different pneumatic excitation patterns, the robot can perform lizard-like longitudinal crawling and crab-like lateral crawling on the same platform, achieving locomotion speeds of 142.54 mm/min and 90.02 mm/min, respectively. The study systematically investigates the joint design principles, structural implementation, fabrication process, robot integration, and motion validation, providing a new technical pathway for the design of pneumatic joints and the development of crawling robots with multiple motion modes.
-
Key words:
- soft robots /
- biomimetic design /
- crawling robots /
- pneumatic joints
-
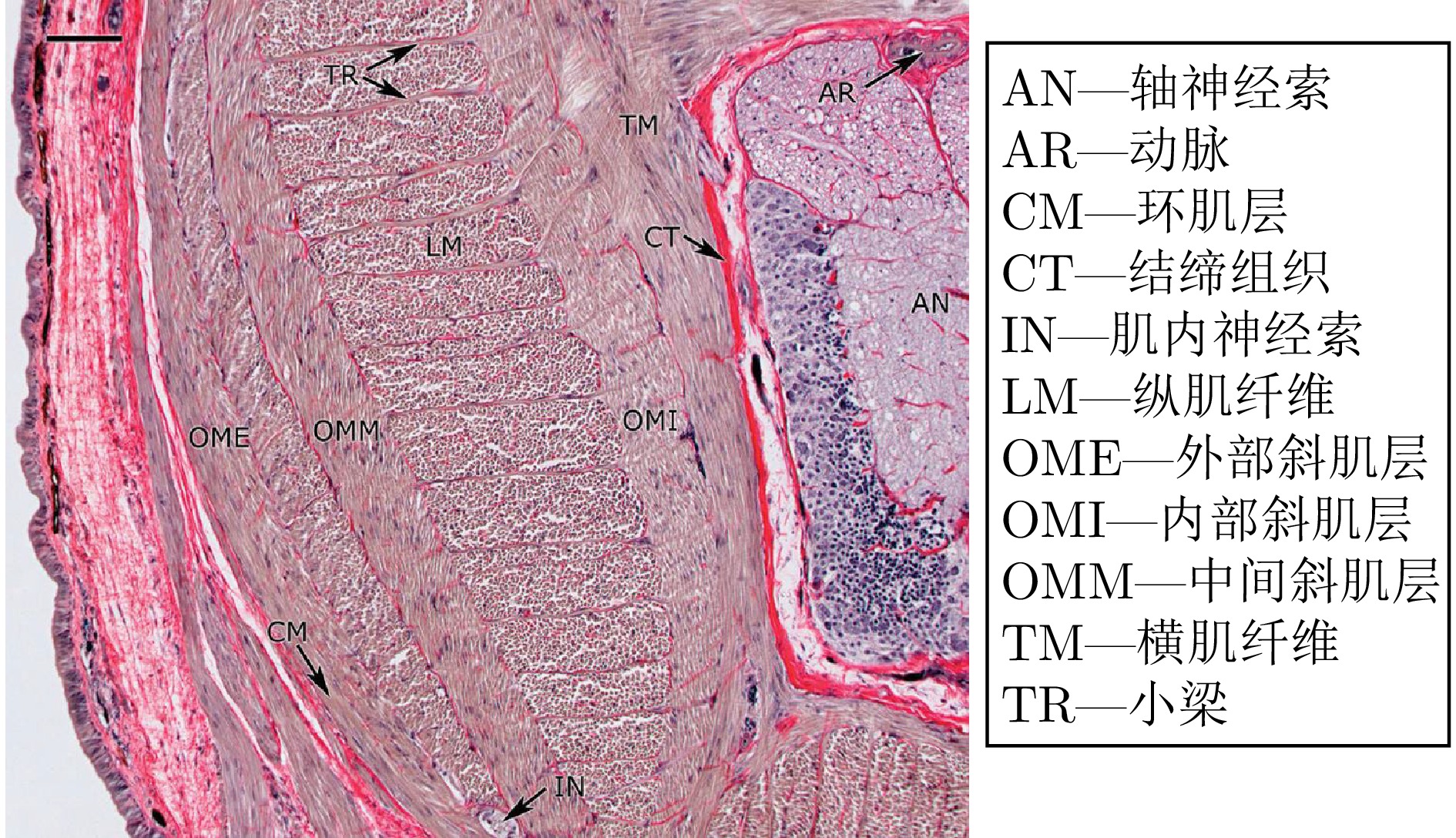
图 3 章鱼触腕的横截面(在该切片中, 红色为结缔组织, 棕色为肌肉. 比例尺: 100 μm)
Fig. 3 The cross-section of an octopus's tentacle (In this slice, red represents connective tissue and brown represents muscle. Scale: 100 µm)
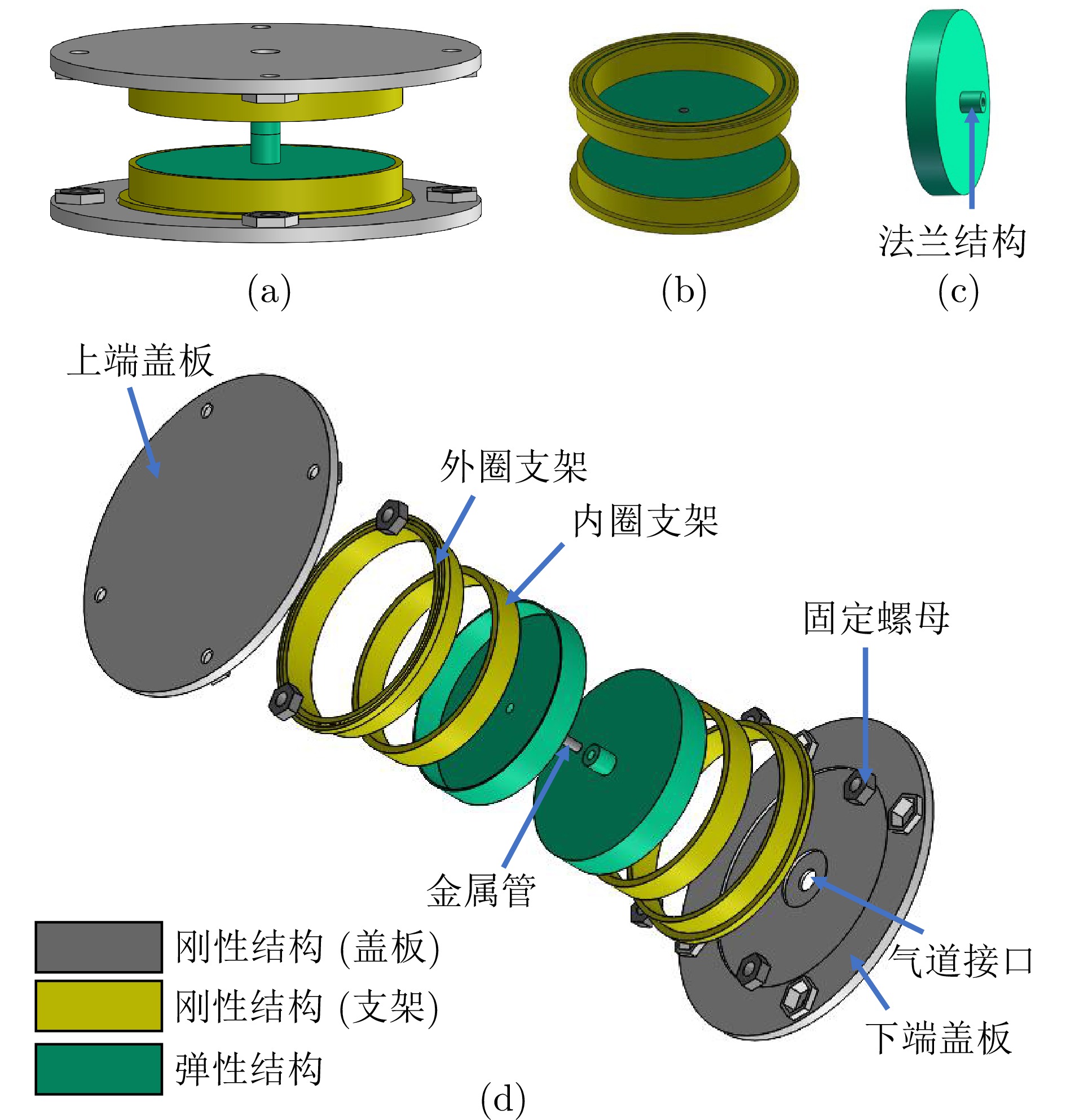
图 4 气动伸长单元((a) 气动伸长单元结构图; (b) 单元的气室结构; (c) 弹性膜结构; (d) 伸长单元的爆炸视图)
Fig. 4 Pneumatic extension unit ((a) Structure diagram of the pneumatic extension unit; (b) Structure of the air chamber of the unit; (c) Elastic membrane structure; (d) Explosion view of the extension unit)
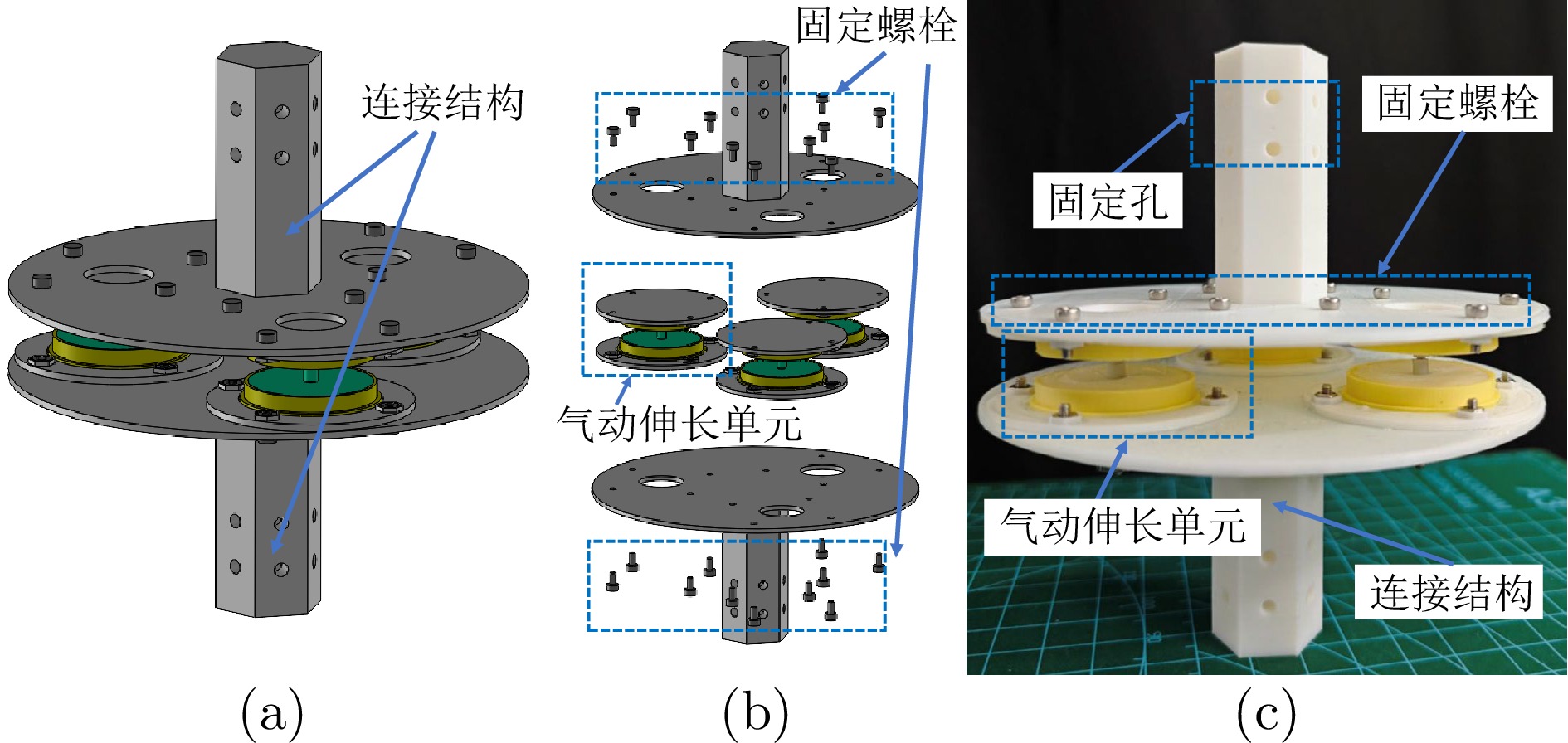
图 5 仿生气动关节((a) 气动关节结构图; (b) 气动关节的爆炸视图; (c)气动关节实物图)
Fig. 5 Biomimetic pneumatic joint ((a) Structural diagram of the pneumatic joint; (b) Exploded view of the pneumatic joint; (c) Physical image of the pneumatic joint)
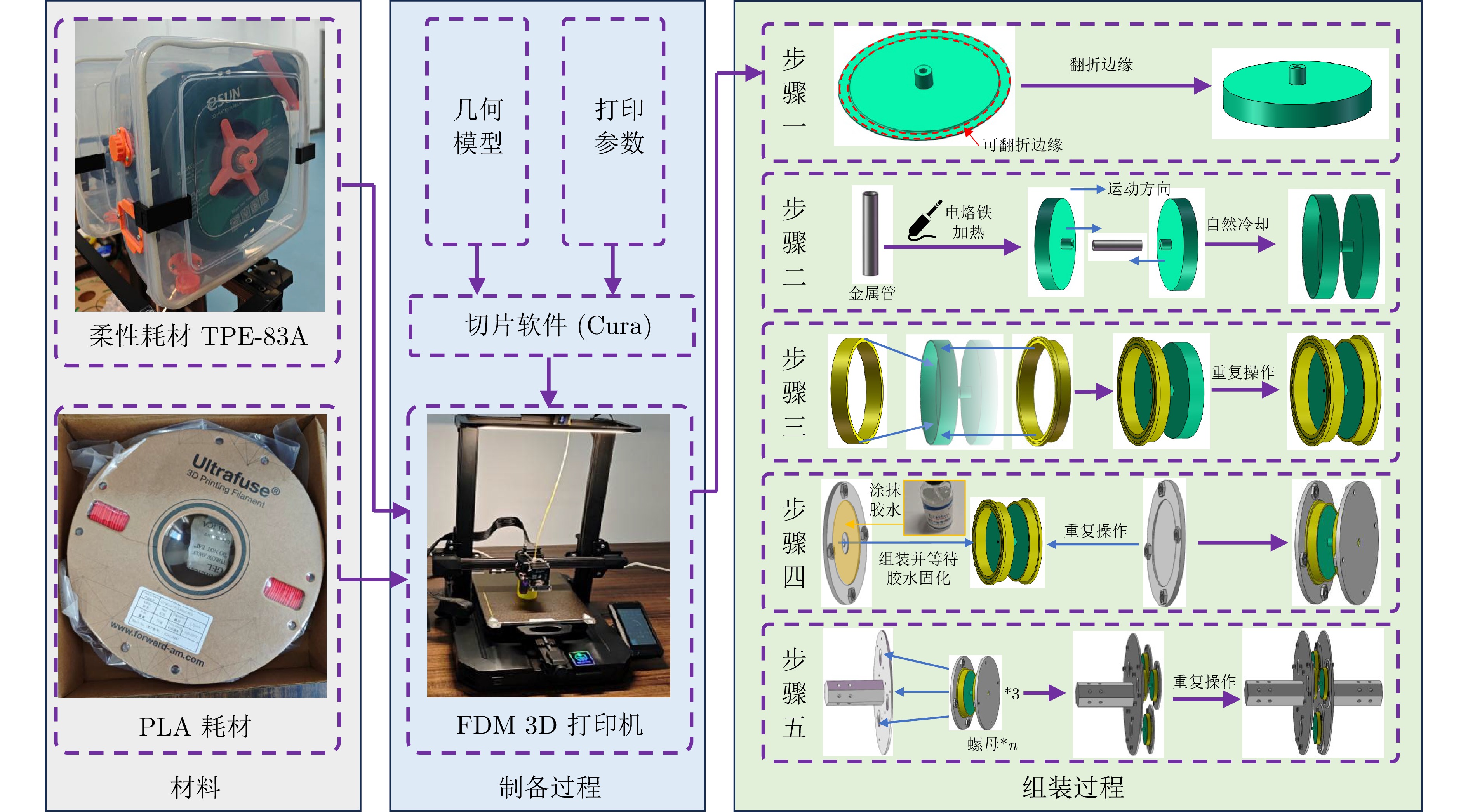
图 7 仿生气动关节的制备与组装流程
Fig. 7 Preparation and assembly process of biomimetic pneumatic joints
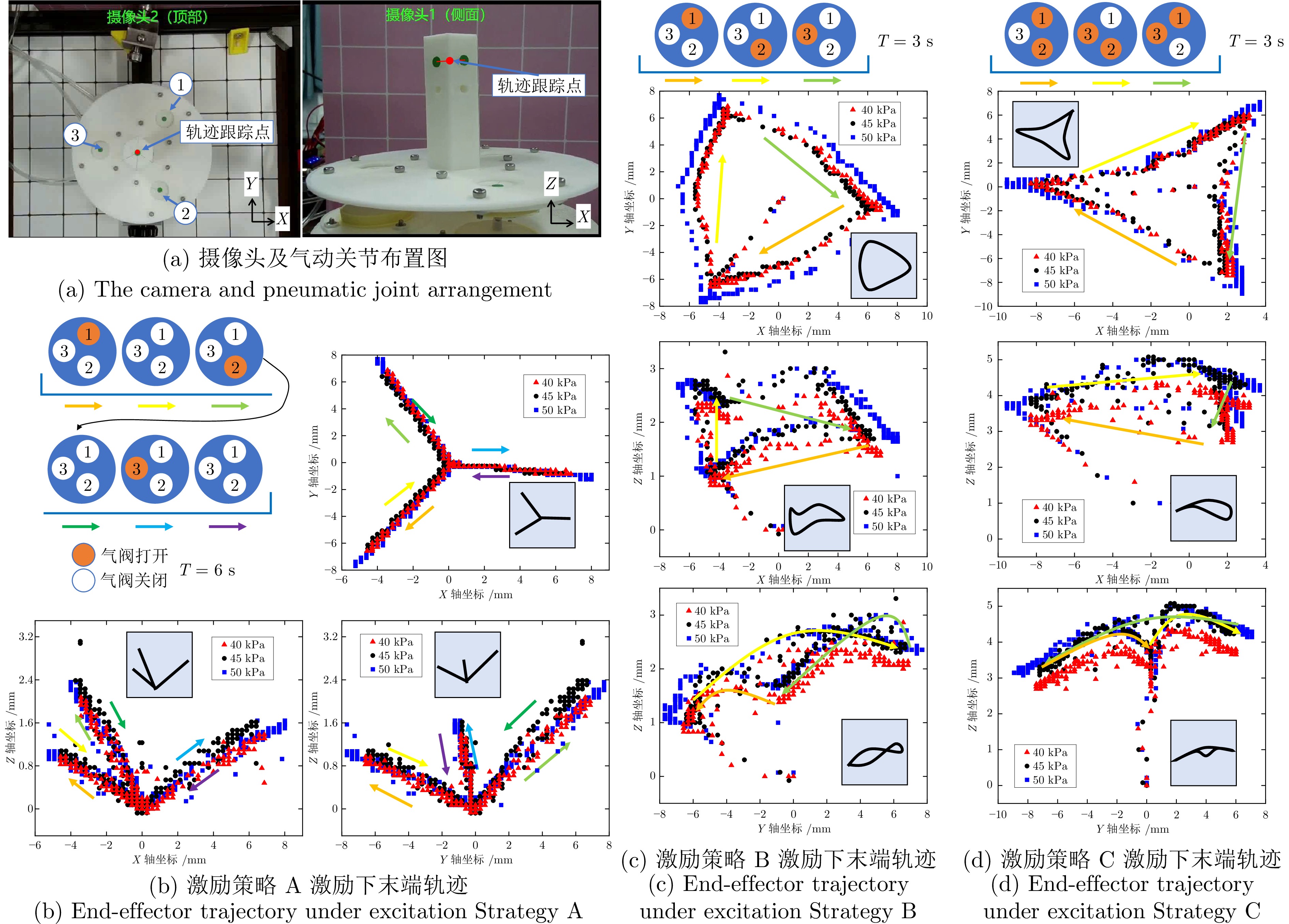
图 9 气动关节轨迹生成实验I (图中数字为气室的编号, 每个实验持续5个周期, 彩色箭头表示运动顺序)
Fig. 9 Trajectory generation Experiment I of the pneumatic joint (The numbers in the figures denote the indices of the pneumatic chambers, each experiment lasted for five cycles, colored arrows indicate the motion sequence)
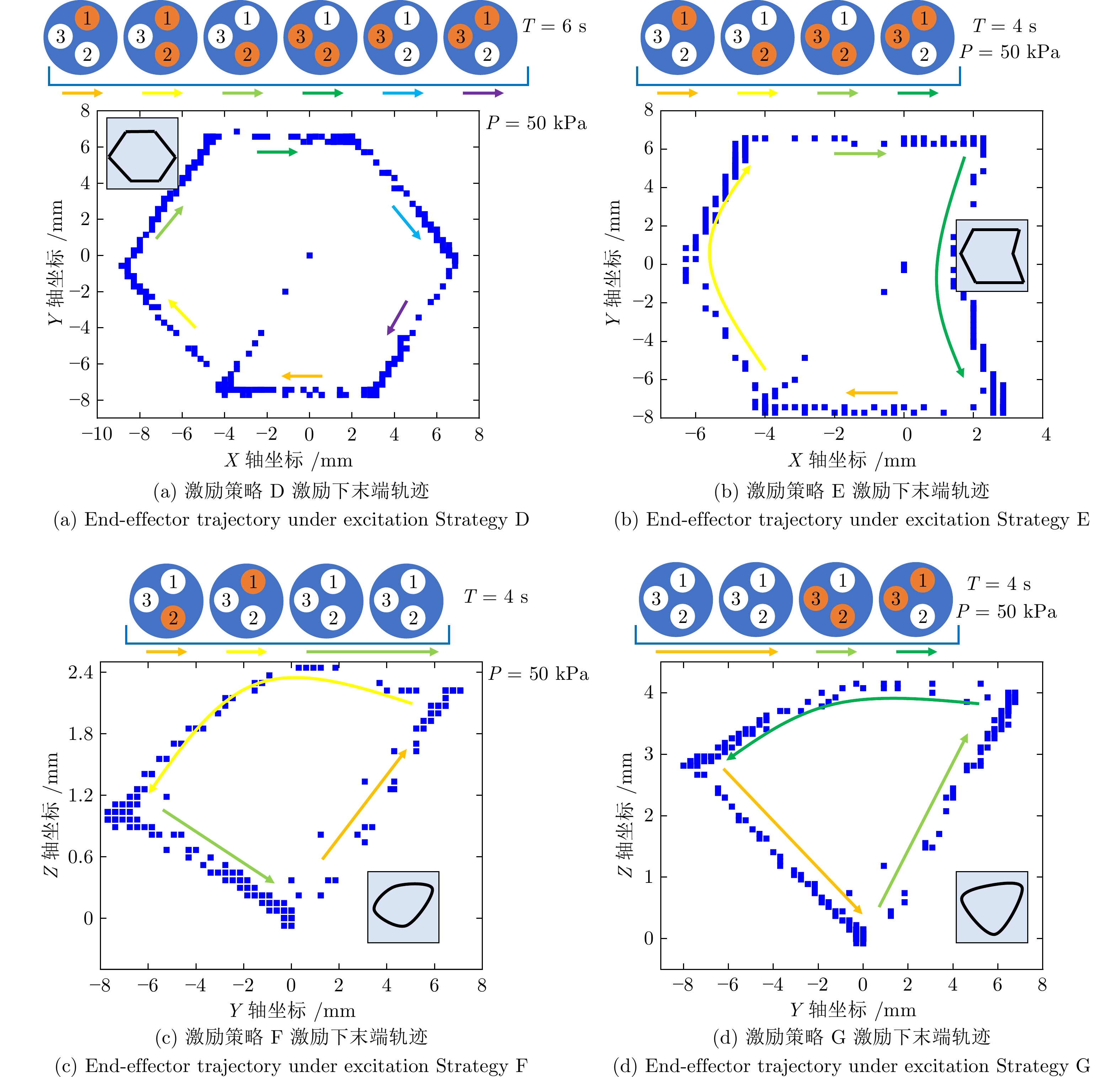
图 10 气动关节轨迹生成实验II (图中数字为气室的编号, 每个实验持续5个周期, 彩色箭头表示运动顺序)
Fig. 10 Trajectory generation Experiment II of the pneumatic joint (The numbers in the figures denote the indices of the pneumatic chambers, each experiment lasted for five cycles, colored arrows indicate the motion sequence)
-
[1] Mosadegh B, Polygerinos P, Keplinger C, Wennstedt S, Shepherd R F, Gupta U, et al. Pneumatic networks for soft robotics that actuate rapidly. Advanced Functional Materials, 2014, 24(15): 2163−2170 doi: 10.1002/adfm.201303288 [2] Liu X H, Chen N, Jiao J R, Liu J. Pneumatic soft phononic crystals with tunable band gap. International Journal of Mechanical Sciences, 2023, 240: Article No. 107906 doi: 10.1016/j.ijmecsci.2022.107906 [3] Polygerinos P, Wang Z, Galloway K C, Wood R J, Walsh C J. Soft robotic glove for combined assistance and at-home rehabilitation. Robotics and Autonomous Systems, 2015, 73: 135−143 doi: 10.1016/j.robot.2014.08.014 [4] Yi C, Liu X H, Xiao C, Liu J, Chen N. Soft phononic crystal with tunable bandgap through pneumatic actuation. Advanced Engineering Materials, 2024, 26(24): Article No. 2401913 doi: 10.1002/adem.202401913 [5] Polygerinos P, Lyne S, Wang Z, Nicolini L F, Mosadegh B, Whitesides G M, et al. Towards a soft pneumatic glove for hand rehabilitation. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 1512−1517 [6] Wakimoto S, Suzumori K. Fabrication and basic experiments of pneumatic multi-chamber rubber tube actuator for assisting colonoscope insertion. In: Proceedings of the IEEE International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. 3260−3265 [7] Connolly F, Walsh C J, Bertoldi K. Automatic design of fiber-reinforced soft actuators for trajectory matching. Proceedings of the National Academy of Sciences of the United States of America, 2017, 114(1): 51−56 doi: 10.1073/pnas.1615140114 [8] Giannaccini M E, Xiang C Q, Atyabi A, Theodoridis T, Nefti-Meziani S, Davis S. Novel design of a soft lightweight pneumatic continuum robot arm with decoupled variable stiffness and positioning. Soft Robotics, 2018, 5(1): 54−70 doi: 10.1089/soro.2016.0066 [9] 王久斌, 贺威, 孟亭亭, 邹尧, 付强. 基于高仿生形态布局的仿鸽扑翼飞行机器人系统设计. 自动化学报, 2024, 50(2): 308−319Wang Jiu-Bin, He Wei, Meng Ting-Ting, Zou Yao, Fu Qiang. System design of dove-like flapping-wing flying robot based on highly bionic morphological layout. Acta Automatica Sinica, 2024, 50(2): 308−319 [10] 尹曌, 贺威, 邹尧, 穆新星, 孙长银. 基于“雁阵效应”的扑翼飞行机器人高效集群编队研究. 自动化学报, 2021, 47(6): 1355−1367Yin Zhao, He Wei, Zou Yao, Mu Xin-Xing, Sun Chang-Yin. Efficient formation of flapping-wing aerial vehicles based on wild geese queue effect. Acta Automatica Sinica, 2021, 47(6): 1355−1367 [11] 徐璠, 王贺升. 软体机械臂水下自适应鲁棒视觉伺服. 自动化学报, 2023, 49(4): 744−753 doi: 10.16383/j.aas.c200457Xu Fan, Wang He-Sheng. Adaptive robust visual servoing control of a soft manipulator in underwater environment. Acta Automatica Sinica, 2023, 49(4): 744−753 doi: 10.16383/j.aas.c200457 [12] 冯育凯, 吴正兴, 谭民. 基于MARL-MHSA架构的水下仿生机器人协同围捕策略: 数据驱动建模与分布式策略优化. 自动化学报, 2025, 51(10): 2269−2282 doi: 10.16383/j.aas.c250086Feng Yu-Kai, Wu Zheng-Xing, Tan Min. Cooperative pursuit policy for bionic underwater robot based on MARL-MHSA architecture: Data-driven modeling and distributed strategy optimization. Acta Automatica Sinica, 2025, 51(10): 2269−2282 doi: 10.16383/j.aas.c250086 [13] Xie Q, Wang T, Yao S D, Zhu Z P, Tan N, Zhu S Q. Design and modeling of a hydraulic soft actuator with three degrees of freedom. Smart Materials and Structures, 2020, 29(12): Article No. 125017 doi: 10.1088/1361-665X/abc26e [14] Zhang B Y, Hu C Q, Yang P H, Liao Z X, Liao H G. Design and modularization of multi-DoF soft robotic actuators. IEEE Robotics and Automation Letters, 2019, 4(3): 2645−2652 doi: 10.1109/LRA.2019.2911823 [15] Kalisky T, Wang Y Q, Shih B, Drotman D, Jadhav S, Aronoff-Spencer E, et al. Differential pressure control of 3D printed soft fluidic actuators. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 6207−6213 [16] Chen S E, Cao Y T, Sarparast M, Yuan H Y, Dong L X, Tan X B, et al. Soft crawling robots: Design, actuation, and locomotion. Advanced Materials Technologies, 2020, 5(2): Article No. 1900837 doi: 10.1002/admt.201900837 [17] Aygül C, Güven C, Frunzi S A, Katz B J, Nemitz M P. A framework for soft mechanism driven robots. Nature Communications, 2025, 16(1): Article No. 1426 doi: 10.1038/s41467-025-56025-3 [18] Shepherd R F, Ilievski F, Choi W, Morin S A, Stokes A A, Mazzeo A D, et al. Multigait soft robot. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(51): 20400−20403 [19] Grossi B, Palza H, Zagal J C, Falcón C, During G. Metarpillar: Soft robotic locomotion based on buckling-driven elastomeric metamaterials. Materials and Design, 2021, 212: Article No. 110285 doi: 10.1016/j.matdes.2021.110285 [20] Tang Y C, Zhang Q T, Lin G J, Yin J. Switchable adhesion actuator for amphibious climbing soft robot. Soft Robotics, 2018, 5(5): 592−600 doi: 10.1089/soro.2017.0133 [21] Kier W M, Stella M P. The arrangement and function of octopus arm musculature and connective tissue. Journal of Morphology, 2007, 268(10): 831−843 doi: 10.1002/jmor.10548 [22] Ainla A, Verma M S, Yang D, Whitesides G M. Soft, rotating pneumatic actuator. Soft Robotics, 2017, 4(3): 297−304 doi: 10.1089/soro.2017.0017 [23] Branyan C, Menǧüç Y. Soft snake robots: Investigating the effects of gait parameters on locomotion in complex terrains. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018. 1−9 [24] Tolley M T, Shepherd R F, Mosadegh B, Galloway K C, Wehner M, Karpelson M, et al. A resilient, untethered soft robot. Soft Robotics, 2014, 1(3): 213−223 doi: 10.1089/soro.2014.0008 -

 下载:
下载:


计量
- 文章访问数: 136
- HTML全文浏览量: 89
- PDF下载量: 8
- 被引次数: 0
