

Interception Mission Planning of USV Swarms for Normally Distributed Targets: Deployment Design, Scheme Implementation and Probability Calculation
-
摘要: 移动目标出现的时空信息不确定性为水面无人艇(USV)集群拦截带来巨大挑战. 针对出现位置服从正态分布、出现时间服从均匀分布的水面移动目标, 开展USV集群对这类移动目标的拦截任务筹划研究. 首先, 在USV集群的布阵设计阶段, 结合目标出现位置的正态分布特性, 提出USV集群“非均匀”布阵设计方案, 生成与目标出现位置的正态分布特性相匹配的优化拦截线; 其次, 分别通过预设时间控制、主从一致性等关键技术, 实现USV集群入阵、定速跟踪以及协同撤收, 三者共同完成USV集群对移动目标的拦截控制; 最后, 根据正态分布概率密度函数特性, 给出该拦截方案下USV集群对该类移动目标拦截概率的解析表达式. 研究表明, 该方案能显著应对目标出现的时空不确定性, 显著提升了对该类移动目标的拦截效能.Abstract: The spatiotemporal information uncertainty associated with emerging mobile targets presents a significant challenge for interception by unmanned surface vessel (USV) swarms. This paper addresses the problem of intercepting a surface mobile target whose emerging location follows a normal distribution and emergence time follows a uniform distribution. During the deployment design phase, a novel “non-uniform” deployment design scheme of the USV swarms is first introduced, generating an optimized interception line that matches the normal distribution characteristic of the target's location. The scheme then integrates prescribed-time control and leader-following consensus laws to manage the entire interception cycle: Swarm deployment into formation, constant-speed tracking, and coordinated withdrawal. Finally, leveraging the properties of the normal distribution probability density function, an analytical expression for the interception probability under the proposed scheme is derived. Simulation studies demonstrate that the proposed scheme effectively counters the spatiotemporal uncertainty of target emergence and markedly enhances interception performance.
-
Key words:
- normally distributed targets /
- USV swarms /
- target interception /
- swarm deployment /
- USV control
-
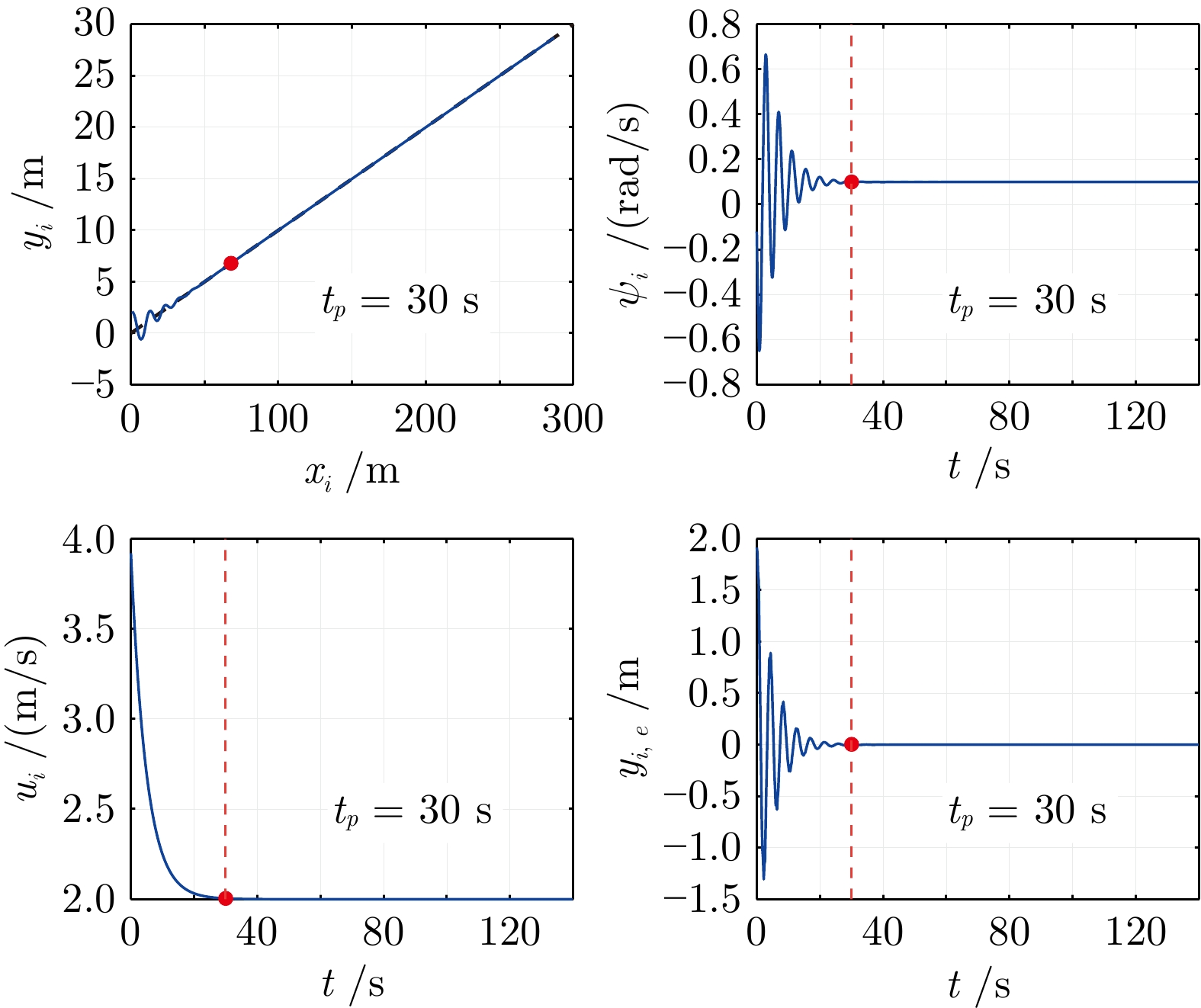
图 4 第$ i $艘USV在$ t_p=30 $s时各个变量的收敛轨迹示意图
Fig. 4 Schematic diagram of the convergence trajectories of the state variables for the $ i \text-\rm th$ USV at the prescribed time $ t_p=30 $s

图 5 在控制算法(11)和(14)作用下, USV集群位置的连续仿真时间快照
Fig. 5 The successive simulation time snapshots of the positions of the USV swarm under control algorithms (11) and (14)
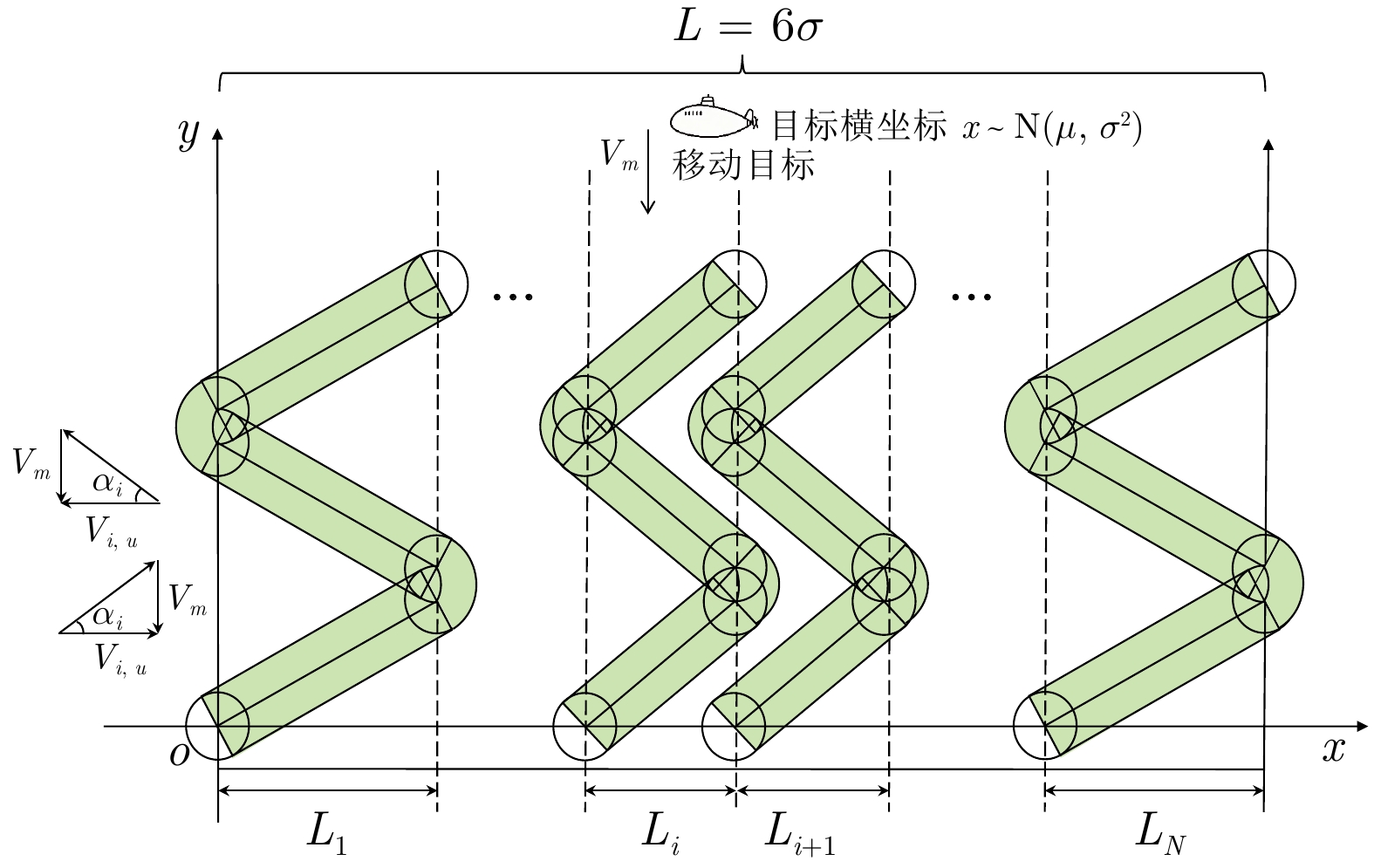
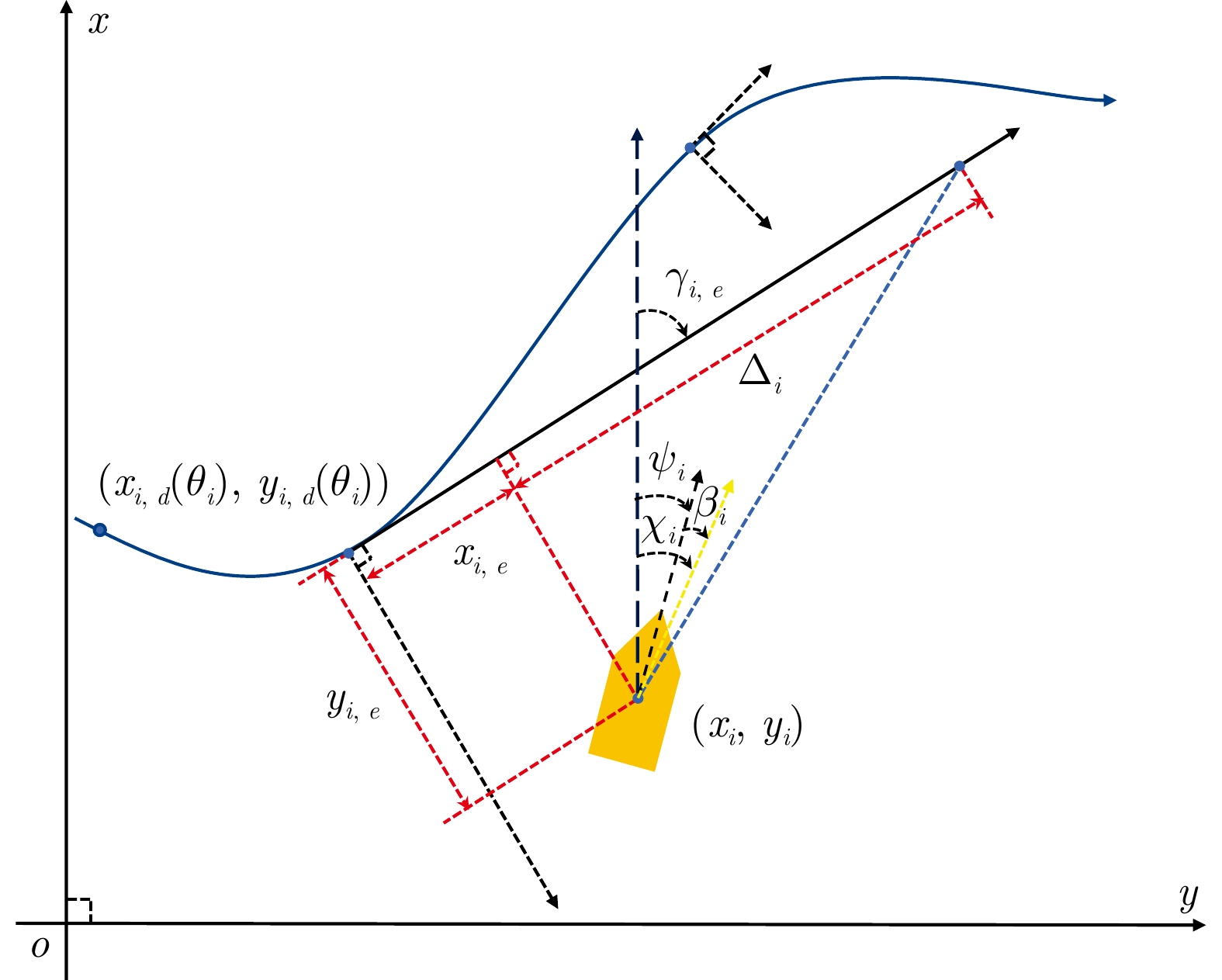
图 9 USV集群与移动目标的相对运动示意图
Fig. 9 Schematic diagram of the relative motion between the USV swarm and the moving target
图 10 第$ i $艘USV完成一次完整往返巡逻的相对探测区域
Fig. 10 The relative detection area of the $ i \text-\rm th$ USV completing one full round-trip patrol
图 11 拦截概率(31)的仿真验证
Fig. 11 Simulation verification on the interception probability given in (31)
图 12 非均匀布阵、均匀布阵和随机布阵下的拦截概率
Fig. 12 Interception probability under non-uniform, uniform and random deployment
表 1 USV动力学参数
Table 1 Dynamic parameters of USV
参数 符号 数值 单位 纵荡一阶阻尼 $ X_u $ −0.72 kg/s 纵荡二阶阻尼 $ X_{u|u|} $ −1.62 kg/m 横漂一阶阻尼 $ Y_v $ −0.86 kg/s 横漂二阶阻尼 $ Y_{v\left|v\right|} $ −56.30 kg/m 艏摇角一阶阻尼 $ N_r $ −1.90 kg·m2/s 艏摇角二阶阻尼 $ N_{r|r|} $ −6.40 kg·m2  下载: 导出CSV
下载: 导出CSV
表 2 各USV巡逻一周到达起始点位的时刻(s)
Table 2 The time when each USV returns to its starting point after one patrol cycle (s)
第1次 第2次 第3次 USV1 $ t_0 = 30.0$ $ t_1 = 101.4 $ $ t_2 = 172.8 $ USV2 $ t_0 = 30.0 $ $ t_1 = 101.4 $ $ t_2 = 172.8 $ USV3 $ t_0 = 30.0 $ $ t_1 = 101.4 $ $ t_2 = 172.8 $ USV4 $ t_0 = 30.0 $ $ t_1 = 101.4 $ $ t_2 = 172.8 $
下载: 导出CSV
-
[1] 闫敬, 关新平. 海上无人系统跨域集群发展现状及其关键技术. 自动化学报, 2025, 51(4): 744−761 doi: 10.16383/j.aas.c240334Yan Jing, Guan Xin-Ping. Development status and key techniques for cross-domain swarm of maritime unmanned systems. Acta Automatica Sinica, 2025, 51(4): 744−761 doi: 10.16383/j.aas.c240334 [2] 王端松, 李东禹, 梁晓玲. 干扰条件下无人艇编队有限时间同步控制. 自动化学报, 2024, 50(5): 1047−1058 doi: 10.16383/j.aas.c230550Wang Duan-Song, Li Dong-Yu, Liang Xiao-Ling. Finite time synchronized formation control of unmanned surface vehicles with external disturbances. Acta Automatica Sinica, 2024, 50(5): 1047−1058 doi: 10.16383/j.aas.c230550 [3] 任璐, 柯亚男, 柳文章, 穆朝絮, 孙长银. 基于优势函数输入扰动的多无人艇协同策略优化方法. 自动化学报, 2025, 51(4): 824−834 doi: 10.16383/j.aas.c240453Ren Lu, Ke Ya-Nan, Liu Wen-Zhang, Mu Chao-Xu, Sun Chang-Yin. Multi-USVs cooperative policy optimization method based on disturbed input of advantage function. Acta Automatica Sinica, 2025, 51(4): 824−834 doi: 10.16383/j.aas.c240453 [4] 袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制. 自动化学报, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141Yuan Yang, Duan Hai-Bin, Wei Chen. Heterogeneous cooperative fixed-time prescribed performance evolution control for unmanned aerial/surface vehicle. Acta Automatica Sinica, 2025, 51(5): 1052−1066 doi: 10.16383/j.aas.c240141 [5] 温广辉, 余星火, 黄廷文, 周艳. 模型参数不确定下多无人艇系统固定时间二分编队跟踪控制. 自动化学报, 2025, 51(3): 669−677 doi: 10.16383/j.aas.c240473Wen Guang-Hui, Yu Xing-Huo, Huang Ting-Wen, Zhou Yan. Fixed-time bipartite formation tracking control for multi-USV systems with uncertain model parameters. Acta Automatica Sinica, 2025, 51(3): 669−677 doi: 10.16383/j.aas.c240473 [6] 谢少荣, 刘坚坚, 张丹. 复杂海况无人艇集群控制技术研究现状与发展. 水下无人系统学报, 2020, 28(6): 584−596 doi: 10.11993/j.issn.2096-3920.2020.06.001Xie Shao-Rong, Liu Jian-Jian, Zhang Dan. Current development of control technology for unmanned surface vessel clusters under complex sea conditions. Journal of Unmanned Undersea Systems, 2020, 28(6): 584−596 doi: 10.11993/j.issn.2096-3920.2020.06.001 [7] 梁巍, 杨日杰, 熊雄. 被动定向声纳浮标跟踪潜艇优化布放. 兵工自动化, 2017, 36(10): 42−45 doi: 10.7690/bgzdh.2017.10.010Liang Wei, Yang Ri-Jie, Xiong Xiong. Optimal deployment of passive directional sonobuoy in underwater target tracking. Ordnance Industry Automation, 2017, 36(10): 42−45 doi: 10.7690/bgzdh.2017.10.010 [8] 章尧卿, 胡柱喜. 反潜巡逻机布设声纳浮标拦截阵对潜搜索建模与仿真. 科学技术与工程, 2018, 18(21): 327−331 doi: 10.3969/j.issn.1671-1815.2018.21.051Zhang Yao-Qing, Hu Zhu-Xi. Model and simulation of antisubmarine patrol aircraft searching submarine by laying sonobuoy interception array. Science Technology and Engineering, 2018, 18(21): 327−331 doi: 10.3969/j.issn.1671-1815.2018.21.051 [9] 张会, 王安, 程健, 屈泽均. 舰船往返拦截搜索发现概率计算公式的推导、检验和修正. 陆军工程大学学报, 2022, 1(1): 54−59Zhang Hui, Wang An, Cheng Jian, Qu Ze-Jun. Derivation, examination and revision of calculation formula for detection probability of ship round-trip interception search. Journal of Army Engineering University of PLA, 2022, 1(1): 54−59 [10] 王晓玲, 张安康, 张会, 徐伟辰, 陈源宝, 黄双, 等. 一种多无人艇探测正态分布目标概率的计算方法, 中国CN116881625B, 2023-11Wang Xiao-Ling, Zhang An-Kang, Zhang Hui, Xu Wei-Chen, Chen Yuan-Bao, Huang Shuang, et al. Method for Calculating Probability of Detecting Normal Distribution Target by Multiple Unmanned Ships, China Patent CN116881625B, November 2023 [11] 陈源宝, 王晓玲, 张安康, 黎烽云, 曹旭, 黄双, 等. 一种多UUV对均匀分布目标的布阵搜索方法, 中国CN117010153B, 2024-11Chen Yuan-Bao, Wang Xiao-Ling, Zhang An-Kang, Li Feng-Yun, Cao Xu, Huang Shuang, et al. Arrangement Searching Method for Uniformly Distributed Targets by Multiple UUVs (Unmanned Underwater Vehicle), China Patent CN117010153B, November 2024 [12] Amato F, Ambrosino R, Ariola M, Cosentino C, de Tommasi G. Finite-time Stability and Control. London: Springer, 2014. [13] Shan Q H, Wang X J, Li T S, Chen C L P. Finite-time control for USV path tracking under input saturation with random disturbances. Applied Ocean Research, 2023, 138: Article No. 103628 doi: 10.1016/j.apor.2023.103628 [14] Kim H J, Yoo S J. Adaptive fixed-time containment control of uncertain underactuated underwater vehicles under dynamic event-driven mechanism. Ocean Engineering, 2024, 291: Article No. 116488 doi: 10.1016/j.oceaneng.2023.116488 [15] Jia X C, Li H P, Chi X B. Prescribed-time consensus of integrator-type multi-agent systems via sampled-data control. IEEE Transactions on Circuits and Systems II: Express Briefs, 2024, 71(7): 3413−3417 doi: 10.1109/tcsii.2024.3361078 [16] Sui B W, Zhang J Q, Liu Z. Extended state observer based prescribed-time trajectory tracking control for USV with prescribed performance constraints and input saturation. Ocean Engineering, 2025, 316: Article No. 120005 doi: 10.1016/j.oceaneng.2024.120005 [17] Su Y B, Teng F, Li T S, Sun Q Y. Adaptive prescribed-time tracking control for an unmanned surface vehicle considering motor-driven propellers. IEEE Transactions on Industrial Informatics, 2025, 21(2): 1665−1673 doi: 10.1109/TII.2024.3485795 [18] Liu X X, Sun B, Su Z N. Adaptive sliding mode control for AUV based on backstepping and neural networks. Measurement Science and Technology, 2025, 36(1): Article No. 016215 [19] Jiang Y B, Guo C, Yu H M. Horizontal trajectory tracking control for an underactuated AUV adopted global integral sliding mode control. In: Proceedings of the Chinese Control and Decision Conference. Shenyang, China: IEEE, 2018. 5786−5791 [20] Zhou Y, Li Y X, Ahn C K. Distributed prescribed-time reinforcement learning control for multiagent uncrewed surface vessels with collision avoidance. IEEE Transactions on Vehicular Technology, 2025, 74(12): 18472−18482 doi: 10.1109/TVT.2025.3585530 [21] Zhang Y, Yan X, Zou W C, Xiang Z R. Fuzzy optimal tracking control for autonomous surface vehicles with prescribed-time convergence analysis. IEEE Transactions on Fuzzy Systems, 2024, 32(11): 6523−6533 doi: 10.1109/TFUZZ.2024.3451493 [22] Fossen T I, Pettersen K Y, Galeazzi R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces. IEEE Transactions on Control Systems Technology, 2015, 23(2): 820−827 doi: 10.1109/TCST.2014.2338354 [23] Su H S, Liu Y F, Zeng Z G. Second-order consensus for multiagent systems via intermittent sampled position data control. IEEE Transactions on Cybernetics, 2020, 50(5): 2063−2072 doi: 10.1109/TCYB.2018.2879327 [24] Huang N, Duan Z S, Chen G R. Some necessary and sufficient conditions for consensus of second-order multi-agent systems with sampled position data. Automatica, 2016, 63: 148−155 doi: 10.1016/j.automatica.2015.10.020 [25] Du S L, Xia W G, Ren W, Sun X M, Wang W. Observer-based consensus for multiagent systems under stochastic sampling mechanism. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(12): 2328−2338 doi: 10.1109/TSMC.2017.2703137 [26] He W L, Zhang B, Han Q L, Qian F, Kurths J, Cao J D. Leader-following consensus of nonlinear multiagent systems with stochastic sampling. IEEE Transactions on Cybernetics, 2017, 47(2): 327−338 [27] Fossen T I. Handbook of Marine Craft Hydrodynamics and Motion Control. Chichester: Wiley, 2011. [28] Zhang X, Chen H J, Xing W, Feng Z G, Jiang H L. Collision-free trajectory tracking strategy of a UUV via finite-time extended state observer-based sliding mode predictive control. Journal of the Franklin Institute, 2024, 361(18): Article No. 107245 doi: 10.1016/j.jfranklin.2024.107245 [29] Ren W, Beard R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5): 655−661 doi: 10.1109/TAC.2005.846556 [30] Su H S, Chen M Z Q, Wang X F. Global coordinated tracking of multi-agent systems with disturbance uncertainties via bounded control inputs. Nonlinear Dynamics, 2015, 82(4): 2059−2068 doi: 10.1007/s11071-015-2299-3 [31] Su H S, Chen G R, Wang X F, Lin Z L. Adaptive second-order consensus of networked mobile agents with nonlinear dynamics. Automatica, 2011, 47(2): 368−375 doi: 10.1016/j.automatica.2010.10.050 [32] Wang Y J, Song Y D, Hill D J, Krstic M. Prescribed-time consensus and containment control of networked multiagent systems. IEEE Transactions on Cybernetics, 2019, 49(4): 1138−1147 doi: 10.1109/TCYB.2017.2788874 [33] Yan Z P, Yang Z W, Yue L D, Wang L, Jia H M, Zhou J J. Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays. Ocean Engineering, 2019, 172: 361−372 doi: 10.1016/j.oceaneng.2018.12.018 [34] Shen B, Wang Z D, Liu X H. Sampled-data synchronization control of dynamical networks with stochastic sampling. IEEE Transactions on Automatic Control, 2012, 57(10): 2644−2650 doi: 10.1109/TAC.2012.2190179 -

 下载:
下载:

计量
- 文章访问数: 295
- HTML全文浏览量: 154
- PDF下载量: 103
- 被引次数: 0
