

-
摘要: 针对现有迭代学习控制方法中迭代次数依赖初始跟踪误差及系统不确定性影响控制精度等问题, 提出一种数据驱动鲁棒固定次迭代学习控制方法. 首先, 通过构造沿迭代轴的双曲正切型趋近律, 设计固定次迭代学习控制器, 推导出跟踪误差的稳态误差带并移除迭代次数上界依赖初始误差这一限制, 保证系统跟踪误差在固定迭代次数内收敛. 在此基础上, 基于系统输入输出数据设计沿迭代轴更新的参数自适应律与扩张状态观测器, 估计未知参数并补偿系统中未知干扰, 进而提高系统的鲁棒性与跟踪精度. 理论分析和仿真结果验证了所提方法的有效性.Abstract: A data-driven robust fixed-iteration learning control method is proposed to overcome the limitations in existing iterative learning control methods, such as the dependence of iteration number on initial tracking errors and reduced control accuracy due to system uncertainties. First, a fixed-iteration learning controller is designed using a hyperbolic tangent reaching law constructed along the iteration axis. The steady-state error band of the tracking error is derived and the restriction on the upper bound for the iteration number, dependent on the initial error, is removed to ensure the system tracking error converges within a fixed number of iterations. Furthermore, parameter adaptive laws and an extended state observer, updated iteratively using system input-output data, are developed to estimate unknown parameters and compensate for unknown disturbances in the system. This ensures the robustness and tracking accuracy of the system. Theoretical analysis and simulation results validate the effectiveness of the proposed method.
-
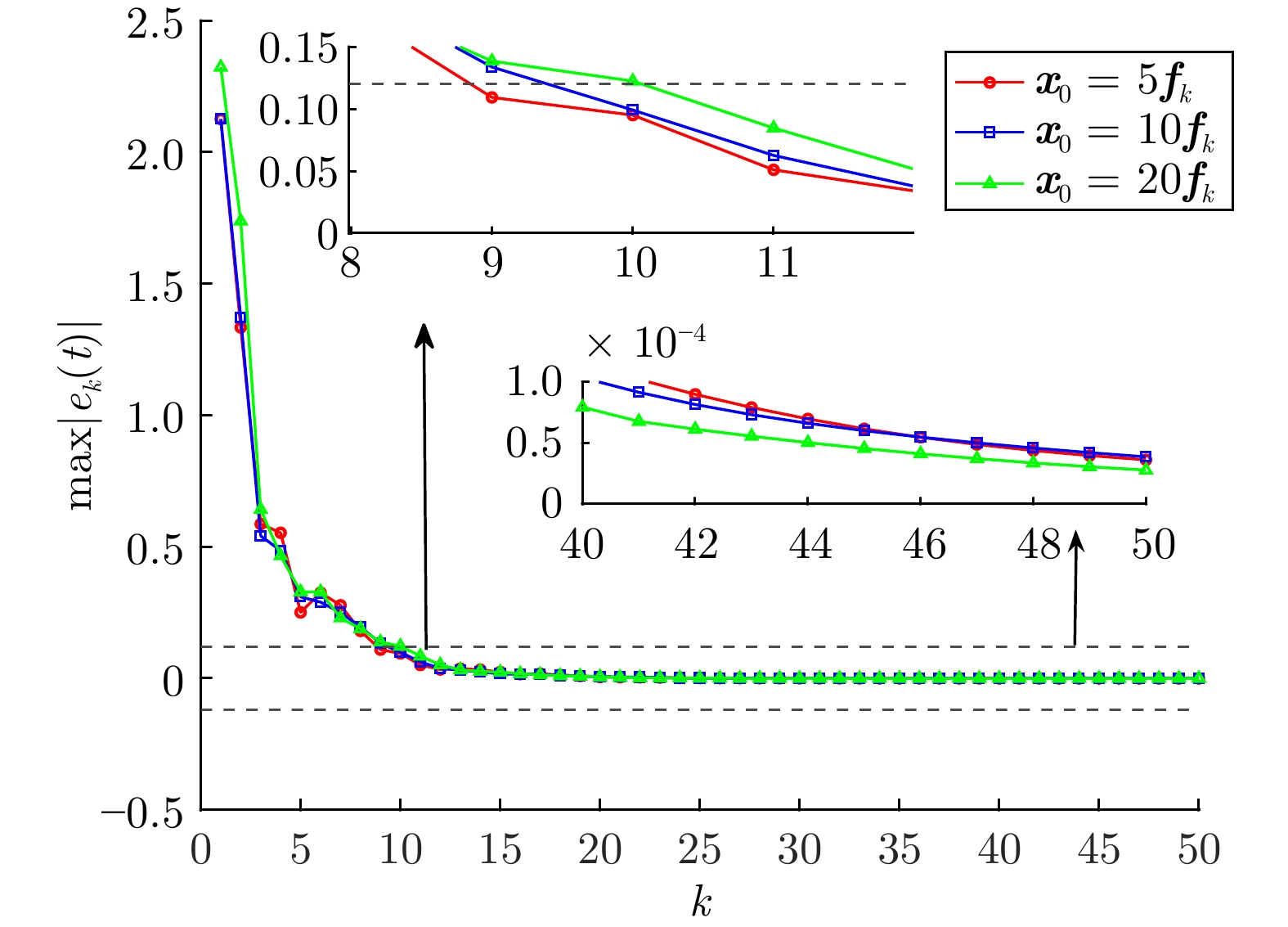
图 6 不同初始状态下$\max |e_k(t)|$的变化曲线
Fig. 6 Variation curve of $\max |e_k(t)|$ in different initial states
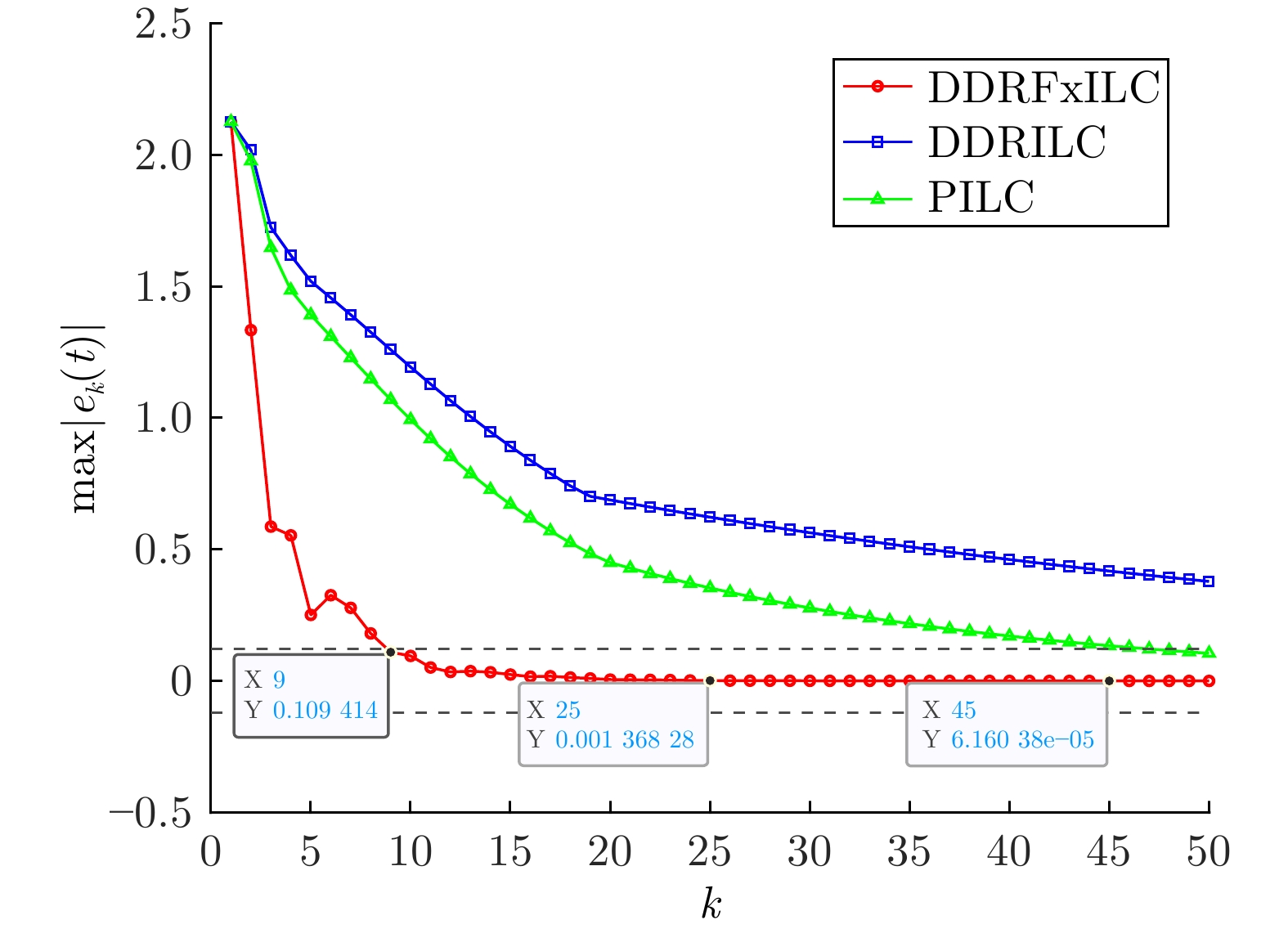
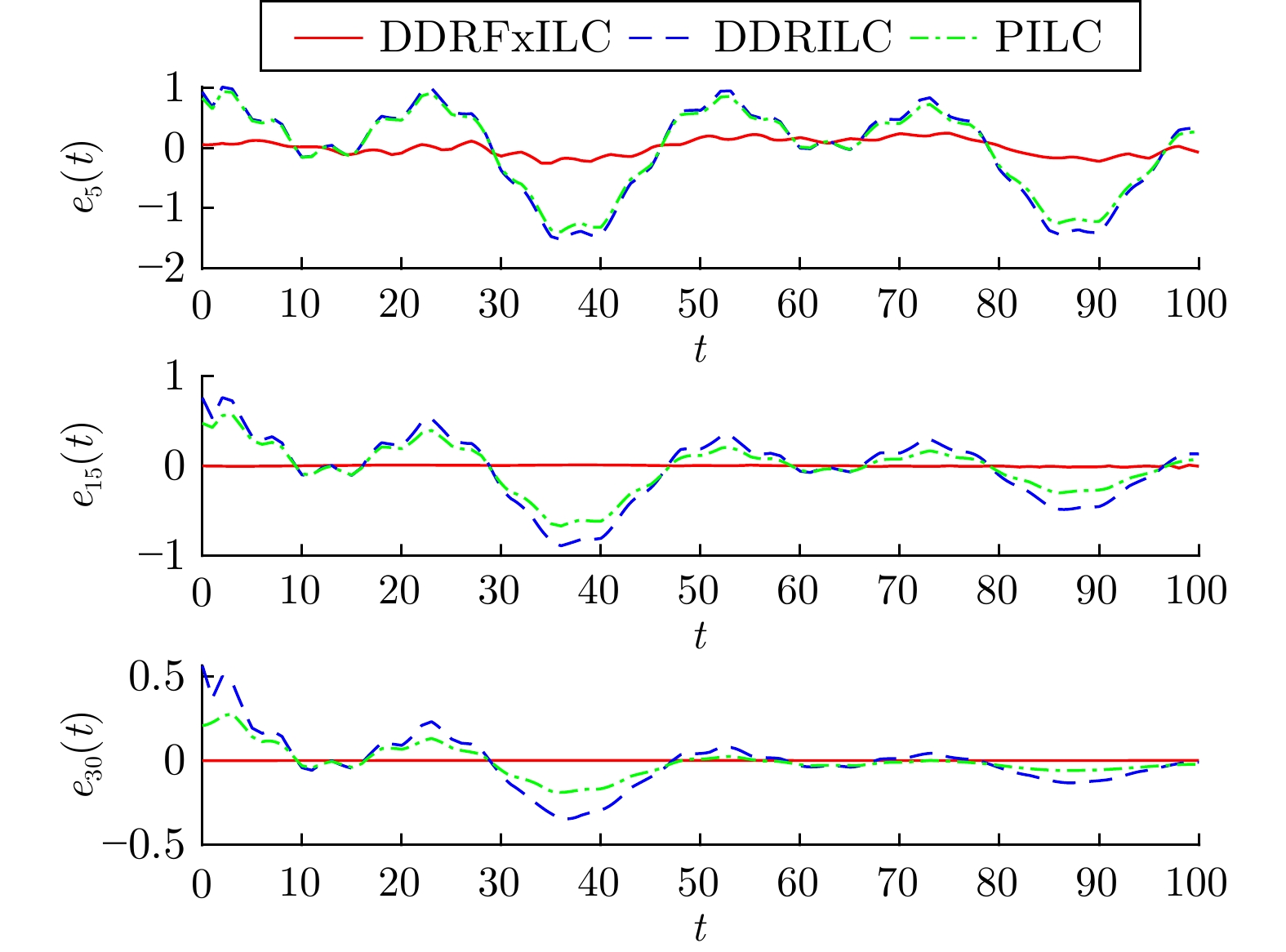
图 4 最大跟踪误差$\max |e_k(t)|$变化曲线
Fig. 4 Variation curve of the maximum tracking error $\max |e_k(t)|$
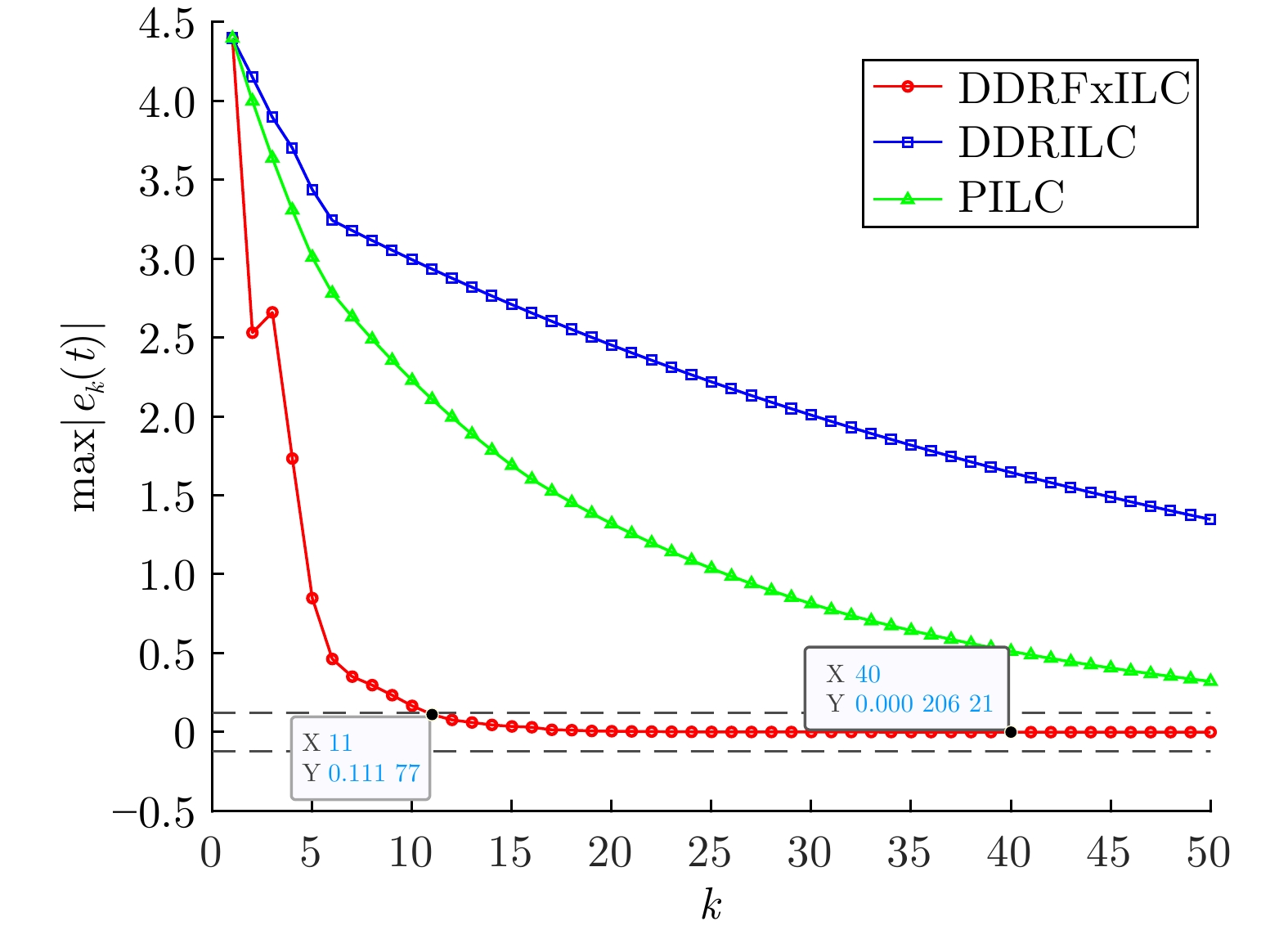
图 8 最大跟踪误差$\max |e_k(t)|$的变化曲线
Fig. 8 Variation curve of the maximum tracking error $\max |e_k(t)|$
表 1 不同初始条件下DDRFxILC方法的性能对比
Table 1 Performance comparison of the DDRFxILC method under different initial conditions
初始状态 进入稳态所需
迭代次数稳态误差均值 稳态误差
标准差第30次迭代
误差$ {\boldsymbol{x}}_0=5{\boldsymbol{f}}_k $ 9 $ 3.00\times 10^{-3} $ $ 5.80\times 10^{-3} $ $ 5.07\times 10^{-4} $ $ {\boldsymbol{x}}_0=10{\boldsymbol{f}}_k $ 10 $ 2.70\times 10^{-3} $ $ 4.90\times 10^{-3} $ $ 3.75\times 10^{-4} $ $ {\boldsymbol{x}}_0=20{\boldsymbol{f}}_k $ 11 $ 2.70\times 10^{-3} $ $ 5.50\times 10^{-3} $ $ 3.08\times 10^{-4} $  下载: 导出CSV
下载: 导出CSV
-
[1] Cheng Y, Chen Q, Hu S Y, Ren X M, Yang M Y, He X X. Error-based model-free adaptive performance tuning control with disturbance rejection for discrete-time nonlinear systems. IEEE Transactions on Industrial Electronics, 2025, 72(12): 14356−14365 doi: 10.1109/TIE.2025.3572983 [2] Meng D Y, Zhang J Y. Distributed learning control for heterogeneous linear multi-agent networks. Automatica, 2024, 169: Article No. 111838 doi: 10.1016/j.automatica.2024.111838 [3] Geng Y, Ruan X E, Yang X, Zhou Q H. Data-based iterative learning control for multiphase batch processes. Asian Journal of Control, 2023, 25(2): 1392−1406 doi: 10.1002/asjc.2936 [4] Shi H H, Chen Q, Hong Y H, Ou X H, He X X. Adaptive fuzzy iterative learning control of constrained systems with arbitrary initial state errors and unknown control gain. IEEE Transactions on Automation Science and Engineering, 2025, 22: 6439−6450 doi: 10.1109/TASE.2024.3445670 [5] 陈强, 陈凯杰, 施卉辉, 孙明轩. 机械臂变长度误差跟踪迭代学习控制. 自动化学报, 2023, 49(12): 2594−2604Chen Qiang, Chen Kai-Jie, Shi Hui-Hui, Sun Ming-Xuan. Error-tracking iterative learning control for robot manipulators with iteration varying lengths. Acta Automatica Sinica, 2023, 49(12): 2594−2604 [6] Liang M D, Li J M. Data-driven iterative learning security consensus for nonlinear multiagent systems with fading channels and deception attacks. IEEE Internet of Things Journal, 2025, 12(12): 19384−19396 doi: 10.1109/JIOT.2025.3542448 [7] Wang S Q, Chen Q, Shi H H, Chen P, He X X. Event-triggered data-driven error-tracking learning control: Theory and experiments. International Journal of Robust and Nonlinear Control, 2026, 36(3): 1167−1180 [8] Zheng J M, Hou Z S. Data-driven spatial adaptive terminal iterative learning predictive control for automatic stop control of subway train with actuator saturation. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(10): 11453−11465 doi: 10.1109/TITS.2023.3275205 [9] Hui Y, Chi R H, Huang B, Hou Z S. Data-driven adaptive iterative learning bipartite consensus for heterogeneous nonlinear cooperation-antagonism networks. IEEE Transactions on Neural Networks and Learning Systems, 2022, 34(11): 8262−8270 [10] Li S Y, Yang G H. Robust data-driven compensation iterative learning consensus tracking control for MIMO multiagent systems with random packet dropouts. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(11): 6776−6788 doi: 10.1109/TSMC.2024.3444905 [11] Xiong W J, Xu L, Huang T W, Yu X H, Liu Y H. Finite-iteration tracking of singular coupled systems based on learning control with packet losses. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(1): 245−255 doi: 10.1109/TSMC.2017.2770160 [12] Yang R N, Gong Y J, Liu G P. Robust finite-iteration tracking of discrete-time systems in repetitive process setting via ILC scheme. International Journal of Robust and Nonlinear Control, 2022, 32(5): 2585−2602 [13] Bu X H, Yang C H, Lv L L, Liang J Q, Hou Z S. Data-driven point-to-point finite-iteration learning control for a class of nonlinear systems with output saturation. IEEE Transactions on Cybernetics, 2025, 55(11): 5492−5502 doi: 10.1109/TCYB.2025.3597743 [14] Chi R H, Liu Z Q, Lin N, Hou Z S, Huang B. Data-driven finite-iteration learning control. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(9): 5296−5306 doi: 10.1109/TSMC.2024.3405544 [15] 余琼霞, 候怡腾, 孙俊杰, 侯忠生. 高速列车受限自适应有限次迭代学习容错控制. 交通运输系统工程与信息, 2024, 24(3): 140−150Yu Qiong-Xia, Hou Yi-Teng, Sun Jun-Jie, Hou Zhong-Sheng. Constrained adaptive finite-iteration learning fault-tolerant control for high-speed train. Journal of Transportation Systems Engineering and Information Technology, 2024, 24(3): 140−150 [16] Liu Z Q, Chi R H, Liu Y, Huang B. Data-driven robust finite-iteration learning control for MIMO nonrepetitive uncertain systems. IEEE Transactions on Cybernetics, 2024, 54(11): 6307−6318 doi: 10.1109/TCYB.2024.3398717 [17] Li Z H, Shen D. Finite-iteration learning control for nonlinear systems with parameter uncertainties. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(9): 6409−6422 doi: 10.1109/TSMC.2025.3578604 [18] Zhu Z Y, Sun M X, He X X. A guaranteed fixed-step convergence approach to discrete sliding mode control of linear disturbed systems. Information Sciences, 2024, 678: Article No. 120978 doi: 10.1016/j.ins.2024.120978 [19] Hu S Y, Chen Q, Ren X M, Wang S B. Adaptive predefined-time synchronization and tracking control for multimotor driving servo systems. IEEE/ASME Transactions on Mechatronics, 2025, 30(1): 494−504 doi: 10.1109/TMECH.2024.3398695 [20] 袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制. 自动化学报, 2025, 51(5): 1052−1066Yuan Yang, Duan Hai-Bin, Wei Chen. Heterogeneous cooperative fixed-time prescribed performance evolution control for unmanned aerial/surface vehicle. Acta Automatica Sinica, 2025, 51(5): 1052−1066 [21] Liu Z, Zhao Y, Zhang O Y, Chen W L, Wang J H, Gao Y B, et al. A novel faster fixed-time adaptive control for robotic systems with input saturation. IEEE Transactions on Industrial Electronics, 2024, 71(5): 5215−5223 doi: 10.1109/TIE.2023.3281701 -

 下载:
下载:

计量
- 文章访问数: 274
- HTML全文浏览量: 151
- PDF下载量: 16
- 被引次数: 0
