

High-reliability Automatic Collision Avoidance Strategy for Unmanned Aerial Vehicles Based on Sensing Reconstruction
-
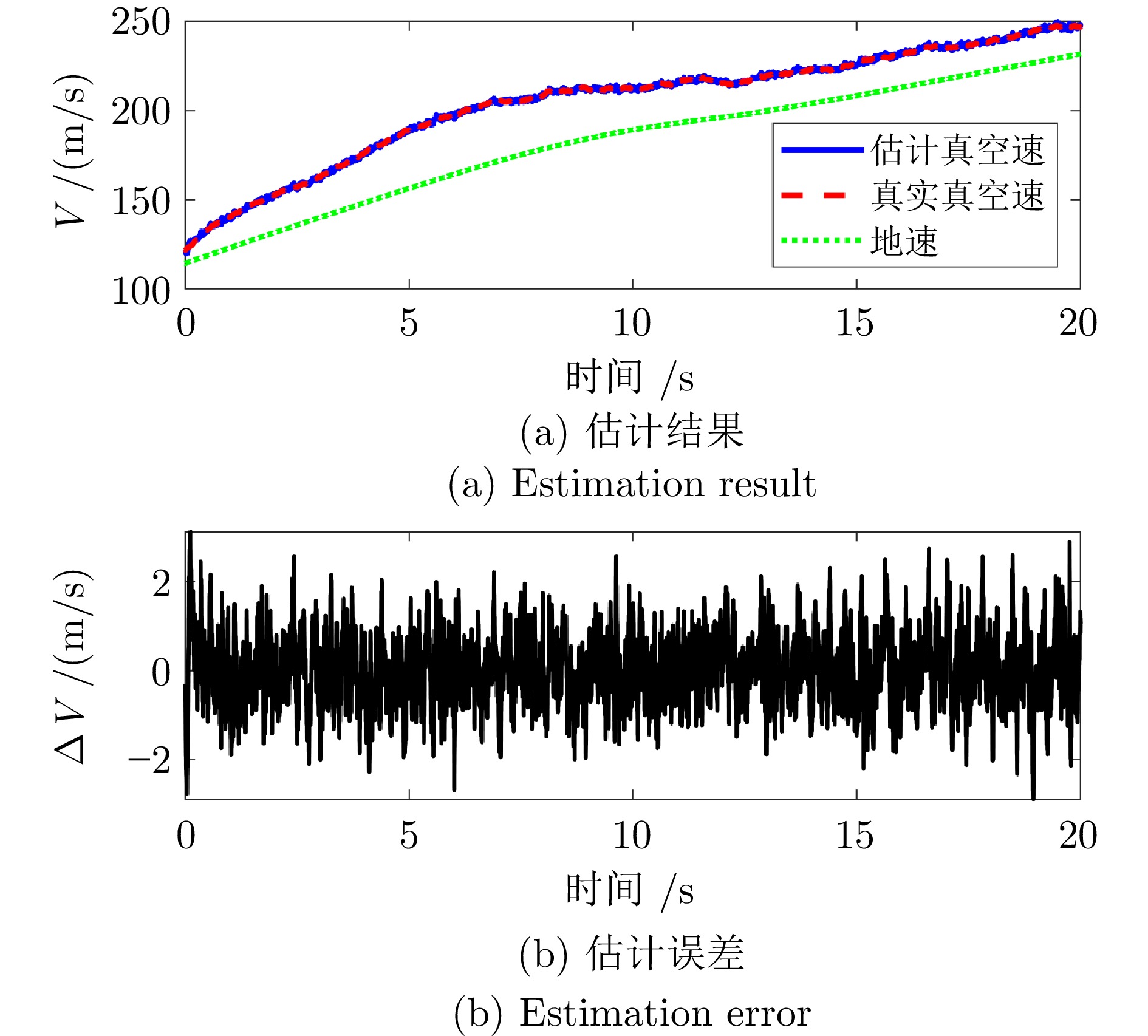
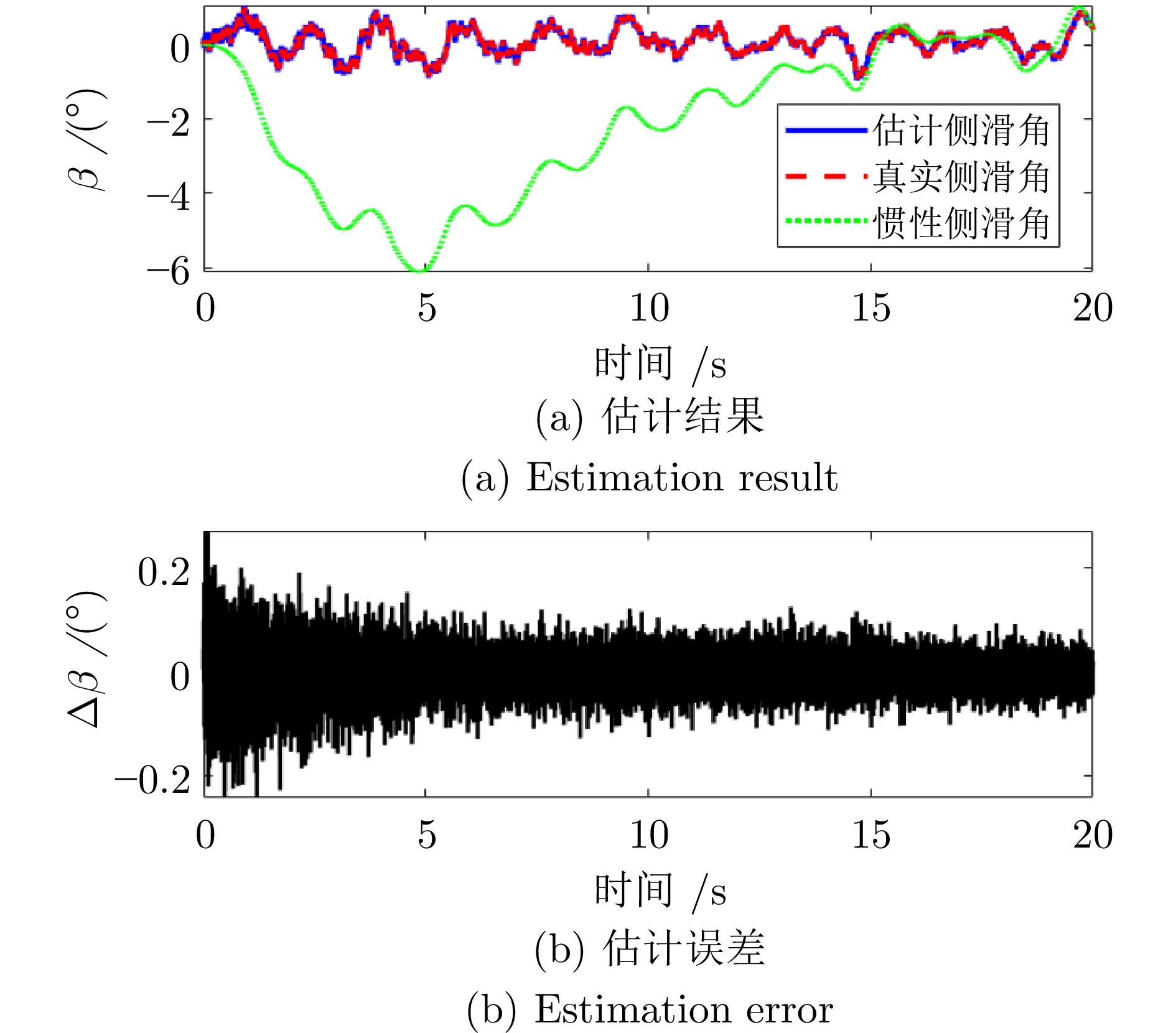
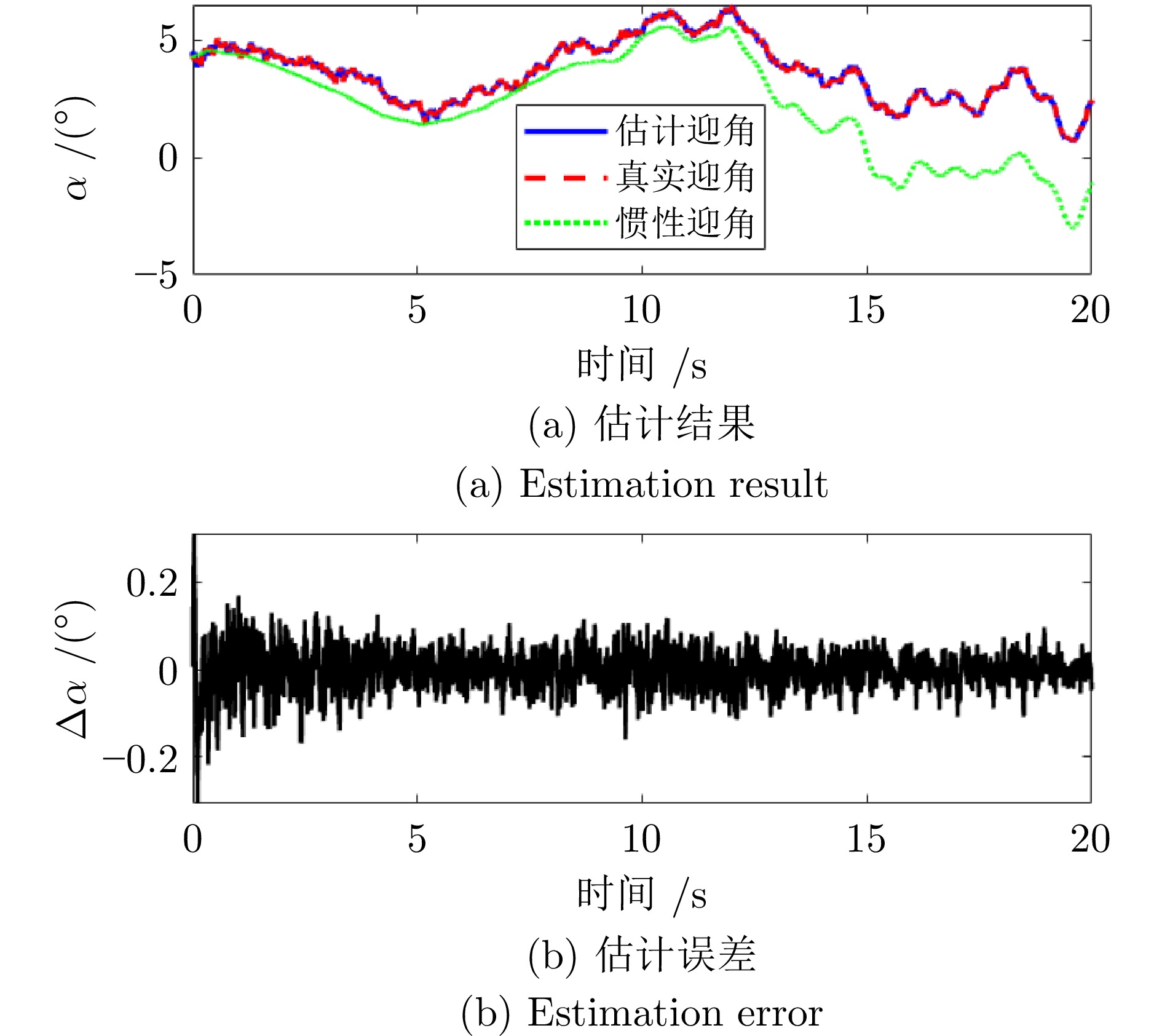
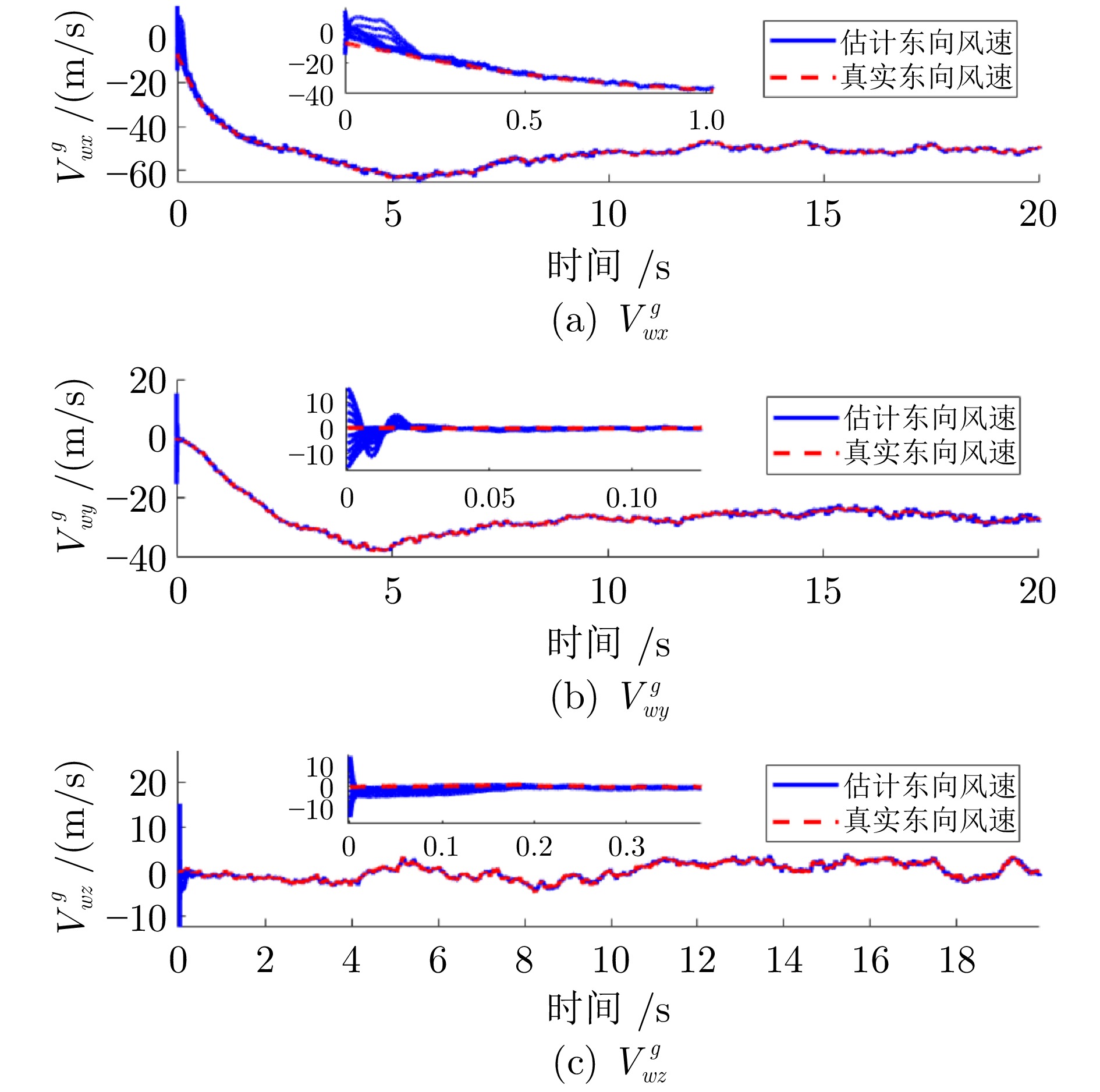
摘要: 面向低空经济发展中无人飞行器对复杂空域安全飞行的需求, 系统考虑大气传感器在强风干扰下的失效问题, 并提出一种基于传感重构的高可靠自动防撞策略. 首先, 建立含湍流扰动的飞行器动力学模型, 采用自适应容积卡尔曼滤波融合导航量测与控制信号, 实现真空速与气流角等状态的鲁棒在线重构; 其次, 针对逃逸阶段的模型失配与噪声扰动, 设计智能学习自适应控制律补偿状态估计误差, 实现逃逸姿态指令稳定跟踪; 最后, 构建滤波协方差驱动的动态防撞包络, 结合控制系统模型量化轨迹预测不确定度, 完成地形碰撞检测, 并生成多逃逸轨迹择优避障指令. 仿真结果表明, 在突风与强湍流条件下, 可实现气流角精确重构及鲁棒防撞告警与改出控制, 相关技术可为低空无人飞行器防撞系统设计提供可靠的解决方案.Abstract: Addressing the safety flight requirements of complex airspace by unmanned aerial vehicles in the context of low-altitude economy development, this paper systematically considers the failure issue of atmospheric sensors under strong wind interference and proposes a high-reliability automatic collision avoidance strategy based on sensing reconstruction. Firstly, an aircraft dynamics model incorporating turbulence disturbances is established, and an adaptive cubature Kalman filter is employed to fuse navigation measurements and control signals, achieving robust online reconstruction of states such as true airspeed and airflow angles. Secondly, to address model mismatch and noise disturbances during the escape phase, an intelligent learning-based adaptive control law is designed to compensate for state estimation errors, enabling stable tracking of escape maneuver commands. Finally, a dynamic collision envelope driven by the filter covariance is constructed, and trajectory prediction uncertainty is quantified by integrating the control system model to complete terrain collision detection. This facilitates the generation of optimal obstacle avoidance commands by evaluating multiple escape trajectories. Simulation results show that accurate airflow angle reconstruction and robust collision warning and recovery control are achieved under gust and severe turbulence conditions. The related techniques can provide a reliable solution for the design of collision avoidance systems in low-altitude unmanned aerial vehicles.
-
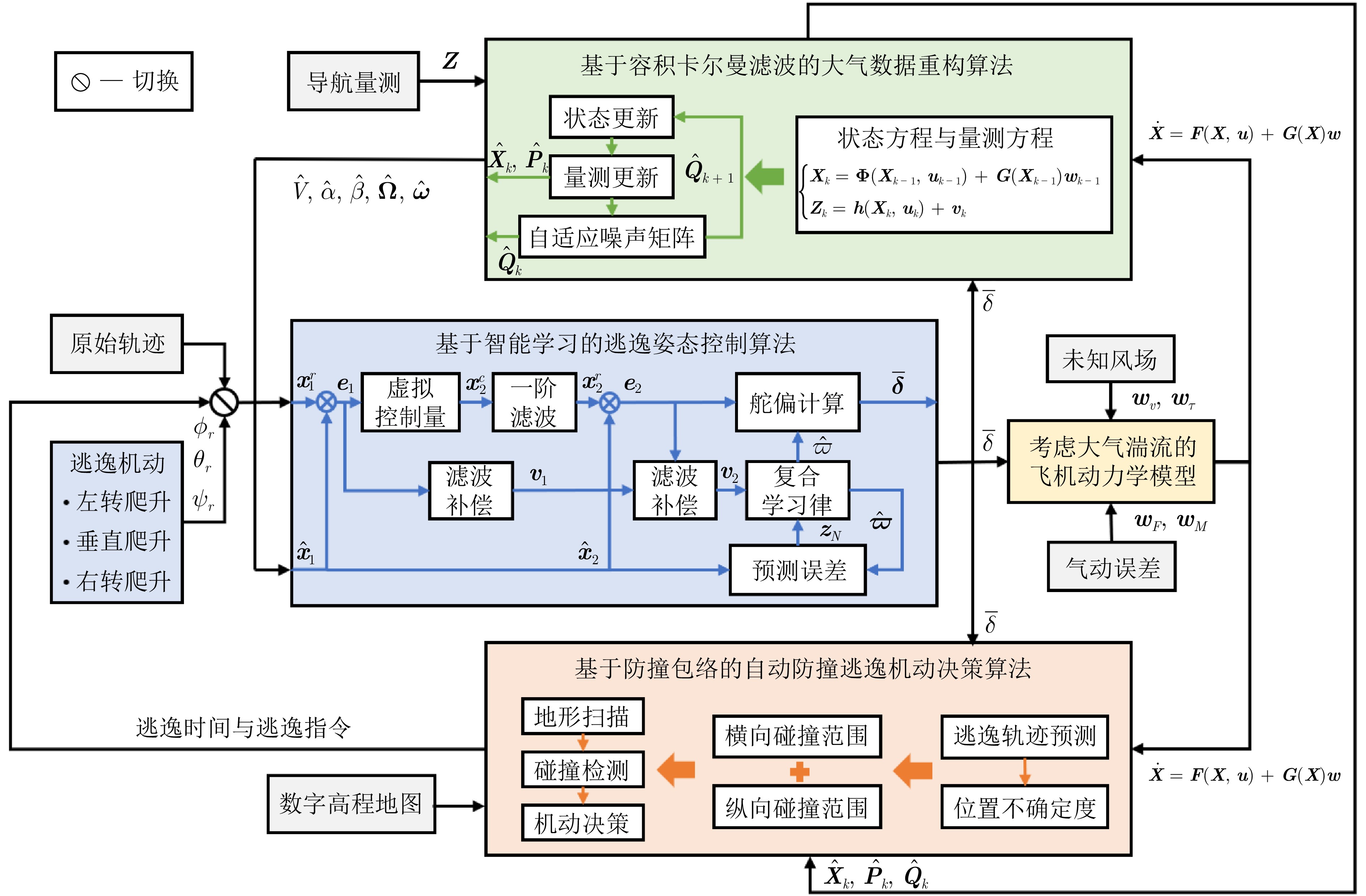
图 1 基于传感重构的高可靠无人飞行器自动防撞策略的系统框图
Fig. 1 System block diagram of the high-reliability automatic collision avoidance strategy for unmanned aerial vehicles based on sensing reconstruction
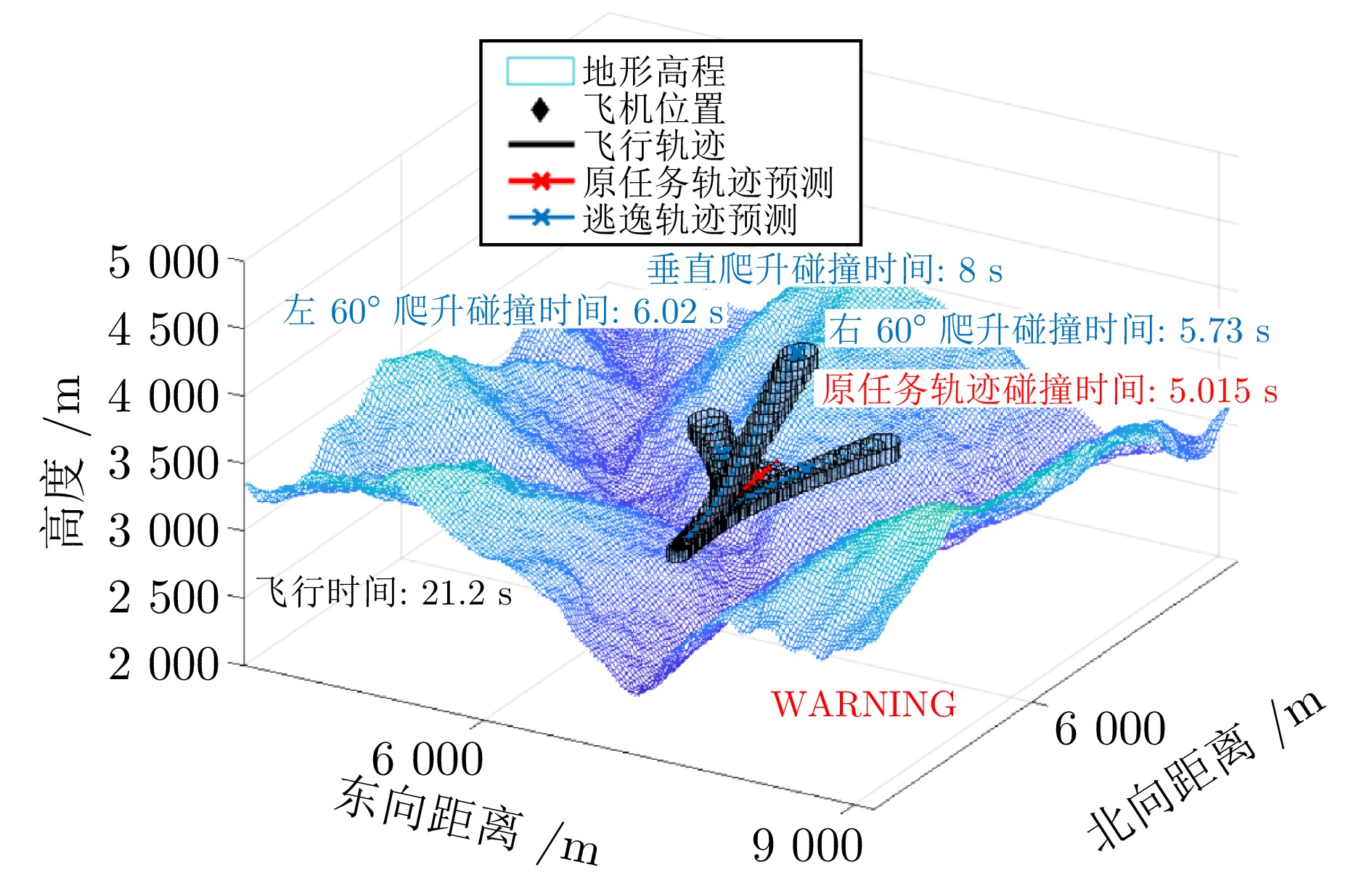
图 9 预测轨迹碰撞检测结果三维展示
Fig. 9 Results of 3D visualization of predicted trajectory collision detection
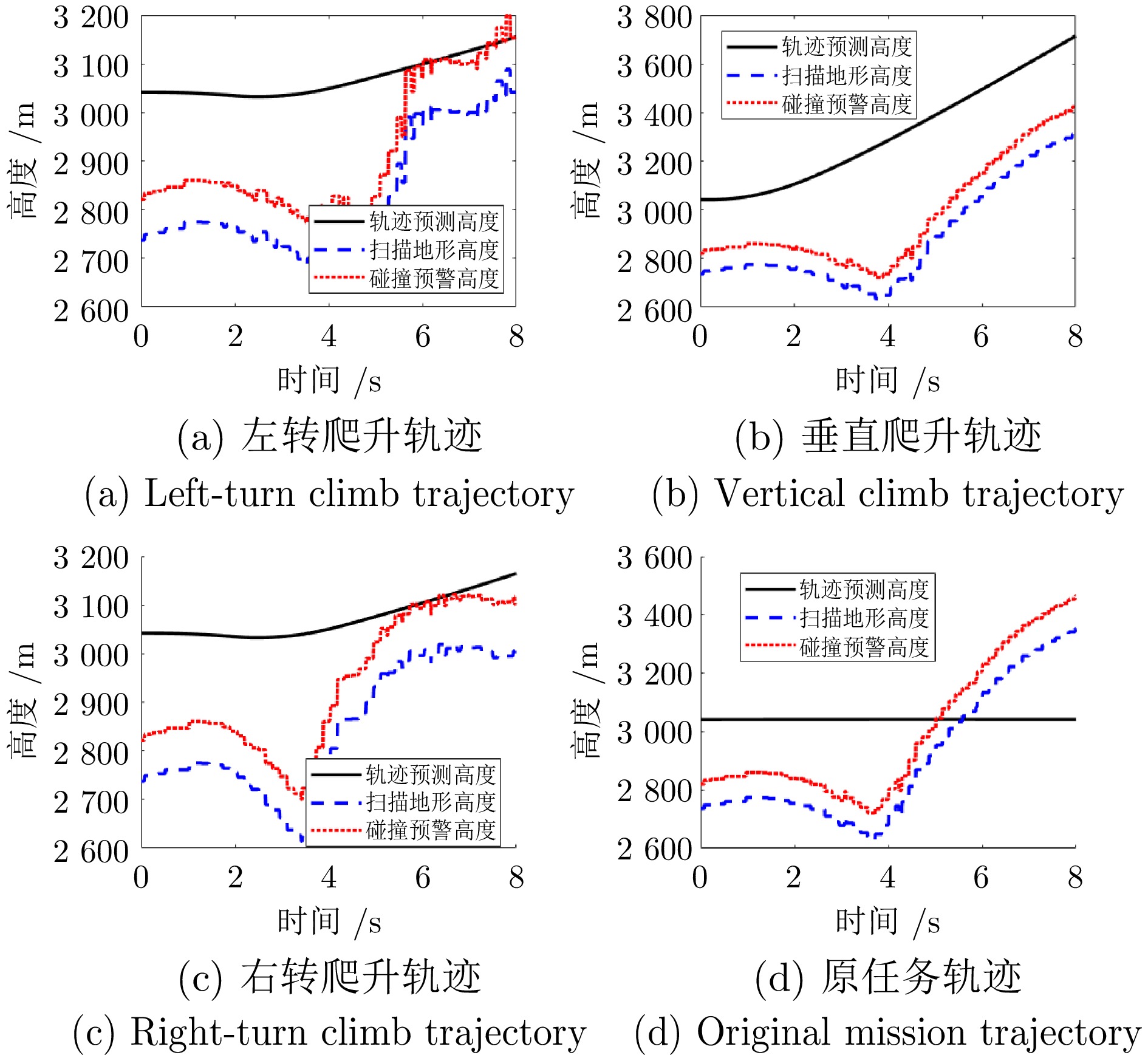
图 10 预测轨迹碰撞检测结果二维展示
Fig. 10 Results of 2D visualization of predicted trajectory collision detection
表 1 算法性能仿真测试结果(%)
Table 1 Results of algorithm performance simulation test (%)
评判指标 本文算法 对比算法 高原 丘陵 高原 丘陵 虚警率 0 0.8 3.2 6.0 告警成功率 99.2 98.0 89.6 85.2 改出成功率 98.8 97.6 83.2 80.8  下载: 导出CSV
下载: 导出CSV
-
[1] 陈林, 缪志强, 王祥科, 陈谋, 段海滨, 王耀南. 自主飞行器技术及其在低空经济中的应用综述. 机器人, 2025, 47(3): 470−496Chen Lin, Miao Zhi-Qiang, Wang Xiang-Ke, Chen Mou, Duan Hai-Bin, Wang Yao-Nan. Overview on autonomous aircraft technology and its application to low-altitude economy. Robot, 2025, 47(3): 470−496 [2] 蒲钒, 陈志杰, 刘杨, 耿欣, 朱永文, 任柯锦. 数字低空融合运行空中交通管理技术. 航空学报, 2025, 46(11): 35−57Pu Fan, Chen Zhi-Jie, Liu Yang, Geng Xin, Zhu Yong-Wen, Ren Ke-Jin. Air traffic management technologies for digital low-altitude integrated operations. Acta Aeronautica et Astronautica Sinica, 2025, 46(11): 35−57 [3] Fan Q, Li J, Liu T, Xu B. Hierarchical optimization design for autonomous flight of vision-based quadrotor using reinforcement learning. IEEE Transactions on Cybernetics, 2025, 55(7): 3119−3130 doi: 10.1109/TCYB.2025.3562800 [4] Kou C G, Stoll J R, Leang K K. Impact of surface roughness on quasi-steady in-ground effect for hover-capable aerial vehicles. International Journal of Micro Air Vehicles, 2025, 17: Article No. 17568293251350056 doi: 10.1177/17568293251350056 [5] Lin C Y, Tseng Y C, Yao W S. Design of UAV flexible landing control system based on model reference adaptive control. International Journal of Micro Air Vehicles, 2025, 17: Article No. 17568293251356945 doi: 10.1177/17568293251356945 [6] Swihart D E, Barfield A F, Griffin E M, Lehmann R C, Whitcomb S C, Flynn B. Automatic ground collision avoidance system design, integration, and flight test. IEEE Aerospace and Electronic Systems Magazine, 2011, 26(5): 4−11 doi: 10.1109/maes.2011.5871385 [7] Lu P, van Kampen E J, de Visser C, Chu Q. Air data sensor fault detection and diagnosis in the presence of atmospheric turbulence: theory and experimental validation with real flight data. IEEE Transactions on Control Systems Technology, 2020, 29(5): 2255−2263 doi: 10.1109/tcst.2020.3025725 [8] Shukla P, Shukla S, Singh A K. Trajectory-prediction techniques for unmanned aerial vehicles (UAVs): A comprehensive survey. IEEE Communications Surveys and Tutorials, 2025, 27(3): 1867−1910 doi: 10.1109/COMST.2024.3471671 [9] 汤新民, 李腾, 陈强超, 顾俊伟. 基于交互式多模型的短期4D航迹预测. 武汉理工大学学报(交通科学与工程版), 2020, 44(1): 39−45Tang Xin-Min, Li Teng, Chen Qiang-Chao, Gu Jun-Wei. Short-term 4D trajectory prediction based on interactive multi-models. Journal of Wuhan University of Technology (Transportation Science and Engineering), 2020, 44(1): 39−45 [10] Bakhtar S, Habibi S. The interacting multiple model smooth variable structure filter for trajectory prediction. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9): 9217−9239 doi: 10.1109/TITS.2023.3271295 [11] Suplisson A W. Optimal Recovery Trajectories for Automatic Ground Collision Avoidance Systems (Auto GCAS) [Ph.D. dissertation], Air Force Institute of Technology, USA, 2015. [12] 白杨, 米禹丰, 刘云飞, 张雪. 基于多轨迹预测的飞机近地防撞技术研究. 飞机设计, 2023, 43(4): 61−65 doi: 10.19555/j.cnki.1673-4599.2023.04.012Bai Yang, Mi Yu-Feng, Liu Yun-Fei, Zhang Xue. Research on aircraft near-ground collision avoidance technology based on multi-trajectory prediction. Aircraft Design, 2023, 43(4): 61−65 doi: 10.19555/j.cnki.1673-4599.2023.04.012 [13] Li M X, Lu F, Zhang H C, Chen J. Predicting future locations of moving objects with deep fuzzy-LSTM networks. Transportmetrica A: Transport Science, 2020, 16(1): 119−136 doi: 10.1080/23249935.2018.1552334 [14] Alex Z, Stewart W, Eduardo N. Naturalistic driver intention and path prediction using recurrent neural networks. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(4): 1584−1594 doi: 10.1109/tits.2019.2913166 [15] Zhang H P, Huang C Q, Tang S Q. CNN-based real-time prediction method of flight trajectory of unmanned combat aerial vehicle. Acta Armamentarii, 2020, 41(9): 1894−1903 [16] Zhang R, Guo P, Cheng G, Wu D, Xu B. Intelligent robust control of MEMS gyroscopes with initial-condition-independent prescribed performance. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(4): 8984−8994 doi: 10.1109/TAES.2025.3549009 [17] 于目航, 王霞, 杨林, 许斌. 面向战机大迎角机动过程的智能学习控制. 自动化学报, 2024, 50(4): 719−730 doi: 10.16383/j.aas.c230642Yu Mu-Hang, Wang Xia, Yang Lin, Xu Bin. Intelligent learning control for fighter maneuvers at high angle of attack. Acta Automatica Sinica, 2024, 50(4): 719−730 doi: 10.16383/j.aas.c230642 [18] Li Z, Cui H, Zhang D, Wang M, Wang X, Xu B. Integral barrier Lyapunov function based ride quality control of flexible civil aircraft with overload constraint. Aerospace Science and Technology, 2026, 168: Article No. 110789 doi: 10.1016/j.ast.2025.110789 [19] Wang X, Yu M, Yang L, Xu B. Airflow angles estimation-based finite-time adaptive neural control for aircraft at high-angle-of-attack maneuvers. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(8): 5126−5136 doi: 10.1109/TSMC.2025.3559536 [20] Shou Y, Zhan T, Xu B, Sun F. Finite-time adaptive control of flexible hypersonic flight vehicle under measurement noise. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 5826−5838 doi: 10.1109/TAES.2024.3523460 [21] 张睿, 李世华, 魏振岩, 许斌. 测量噪声下的高超声速飞行器组合观测鲁棒控制. 宇航学报, 2024, 45(2): 203−211 doi: 10.3873/j.issn.1000-1328.2024.02.005Zhang Rui, Li Shi-Hua, Wei Zhen-Yan, Xu Bin. Robust control of hypersonic flight vehicle based on combined state observation under measurement noises. Journal of Astronautics, 2024, 45(2): 203−211 doi: 10.3873/j.issn.1000-1328.2024.02.005 [22] Molnar T G, Kannan S K, Cunningham J, Dunlap K, Hobbs K L, Ames A D. Collision avoidance and geofencing for fixed-wing aircraft with control barrier functions. IEEE Transactions on Control Systems Technology, 2025, 33(5): 1493−1508 doi: 10.1109/TCST.2025.3536215 [23] Harun M H, Abdullah S S, Aras M S M, Bahar M B, Ali I F. Recent developments and future prospects in collision avoidance control for unmanned aerial vehicles (UAVS): A review. International Journal of Robotics and Control Systems, 2024, 4(3): 1207−1242 doi: 10.31763/ijrcs.v4i3.1482 [24] Yuan S, Li Q, Lu B, Niu X, Liu Y, Gao W. Trajectory prediction for fighter aircraft ground collision avoidance based on the model predictive control technique. Aerospace Systems, 2025, 8(1): 61−70 doi: 10.1007/s42401-024-00300-6 [25] Chen R, Zhao L. Ground collision avoidance system with multi-trajectory risk assessment and decision function. The Aeronautical Journal, 2024, 128(1327): 2038−2053 doi: 10.1017/aer.2024.13 [26] Trombetta John V. Multi-Trajectory Automatic Ground Collision Avoidance System With Flight Tests (Project Have ESCAPE) [Ph.D. dissertation], Air Force Institute of Technology, USA, 2016. [27] Guo P, Zhang R, Xu B. Safety separation distance design for UAV formation based on system performance. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 5980−5995 doi: 10.1109/TAES.2024.3524948 [28] Hernandez-Romero E, Valenzuela A, Rivas D. Probabilistic multi-aircraft conflict detection and resolution considering wind forecast uncertainty. Aerospace Science and Technology, 2020, 105(10): Article No. 105973 doi: 10.1016/j.ast.2020.105973 [29] Siqi H, Shaowu C, Yaping Z. A multi-aircraft conflict detection and resolution method for 4-dimensional trajectory-based operation. Chinese Journal of Aeronautics, 2018, 31(7): 1579−1593 doi: 10.1016/j.cja.2018.04.017 [30] Yang Y, Zhang J, Cai K Q. Multi-aircraft conflict detection and resolution based on probabilistic reachsets. IEEE Transactions on Control Systems Technology, 2016, 25(1): 309−316 [31] Jilkov V P, Ledet J H, Li X R. Multiple model method for aircraft conflict detection and resolution in intent and weather uncertainty. IEEE Transactions on Aerospace and Electronic Systems, 2018, 55(2): 1004−1020 doi: 10.1109/taes.2018.2867698 [32] 吕晓晨, 史静平, 吕永玺, 李耕农. 传感器失效下的魔毯着舰气流角重构算法. 航空学报, 2025, 46(13): 264−279 doi: 10.7527/S1000-6893.2024.31159Lyu Xiao-Chen, Shi Jing-Ping, Lyu Yong-Xi, Li Geng-Nong. Flow angle reconstruction algorithm for MAGIC CARPET landing with sensor failure. Acta Aeronautica et Astronautica Sinica, 2025, 46(13): 264−279 doi: 10.7527/S1000-6893.2024.31159 -

 下载:
下载:

计量
- 文章访问数: 2817
- HTML全文浏览量: 424
- PDF下载量: 104
- 被引次数: 0
