

Research on Structural Design and System Control of Bionic Multi-joint Pipeline Robots
-
摘要: 受自然界多关节生物运动机理的启发, 针对当前仿生管道机器人面临的结构紧凑性以及运动速率的问题, 设计一种新型仿生多关节管道检测机器人. 该管道机器人采用多关节串联与可变构型设计, 在保证管道机器人环境适应性的情况下, 提高管道机器人运动速率和结构的紧凑性. 管道机器人在最大伸展状态下的外观尺寸为446 mm×80 mm×71.2 mm (长×宽×高). 通过对管道机器人进行几何通过性分析, 确定其适用的管道范围: 在仅含竖直管的情况下, 适应管径为108 ~ 163 mm; 在仅含水平管且无弯曲段时, 最小适应管径为108 mm; 在含有水平弯曲段时, 最小适应管径增至213 mm, 且对应的最小弯曲半径为26 mm. 开展多种工况下的运动实验, 实验结果表明, 机器人在水平管道中的最大平均运动速度可达 107.5 mm/s, 并能够完成管径适应、翻滚运动、倾斜管道及直角弯管实验, 验证了仿生多关节管道检测机器人方案设计的可行性. 本文所提出的仿生多关节管道机器人为变管径管道检测机器人设计提供了借鉴.Abstract: Inspired by the locomotion mechanism of multi-jointed organisms in nature, aiming at the problems of structural compactness and movement speed faced by current bionic pipeline robots, this paper designs a novel bionic multi-jointed pipeline inspection robot. Adopting a multi-joint series connection and variable configuration design, the proposed pipeline robot improves the movement speed and structural compactness while ensuring its environmental adaptability. The overall dimension of the pipeline robot at the maximum extension state is 446 mm × 80 mm × 71.2 mm (length × width × height). Through the geometric passability analysis of the pipeline robot, its applicable pipeline range is determined. For pipelines with only vertical sections, the adaptable pipe diameter ranges from 108 mm to 163 mm; for straight horizontal pipelines without curved sections, the minimum adaptable pipe diameter is 108 mm; for horizontal pipelines with curved sections, the minimum adaptable pipe diameter increases to 213 mm, with a corresponding minimum bending radius of 26 mm. Motion experiments under various working conditions are carried out. The experimental results show that the maximum average moving speed of the robot in horizontal pipelines can reach 107.5 mm/s. Meanwhile, the robot can realize pipe diameter adaptation, rolling locomotion, and stable movement in inclined pipelines and right-angle bent pipes, which verifies the feasibility of the structural design of the bionic multi-jointed pipeline inspection robot. The bionic multi-jointed pipeline robot proposed in this paper provides a reference for the design of pipeline inspection robots applicable to variable-diameter pipelines.
-
Key words:
- pipeline inspection /
- bionic design /
- multi-joint robot /
- variable pipe diameter
-
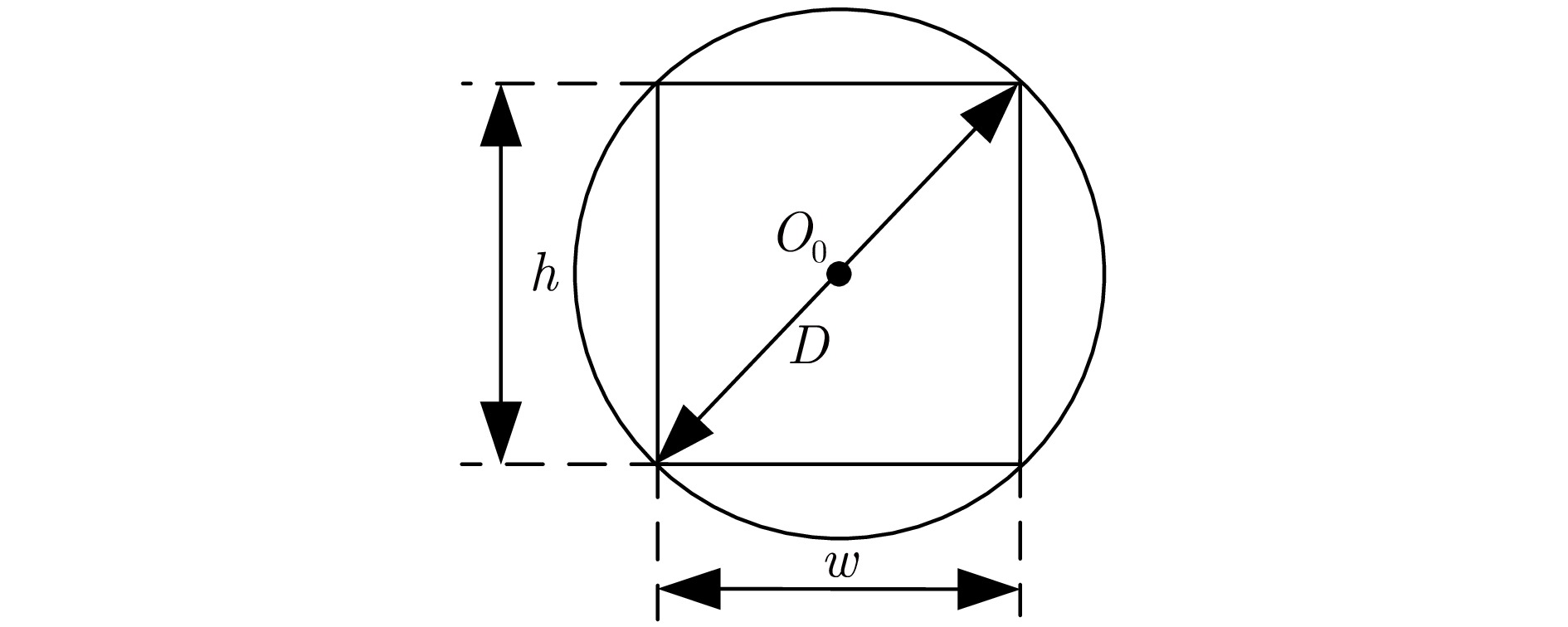
图 5 管道机器人在直线管道中的极限示意图
Fig. 5 Schematic diagram of the limitations of pipeline robots in straight pipelines
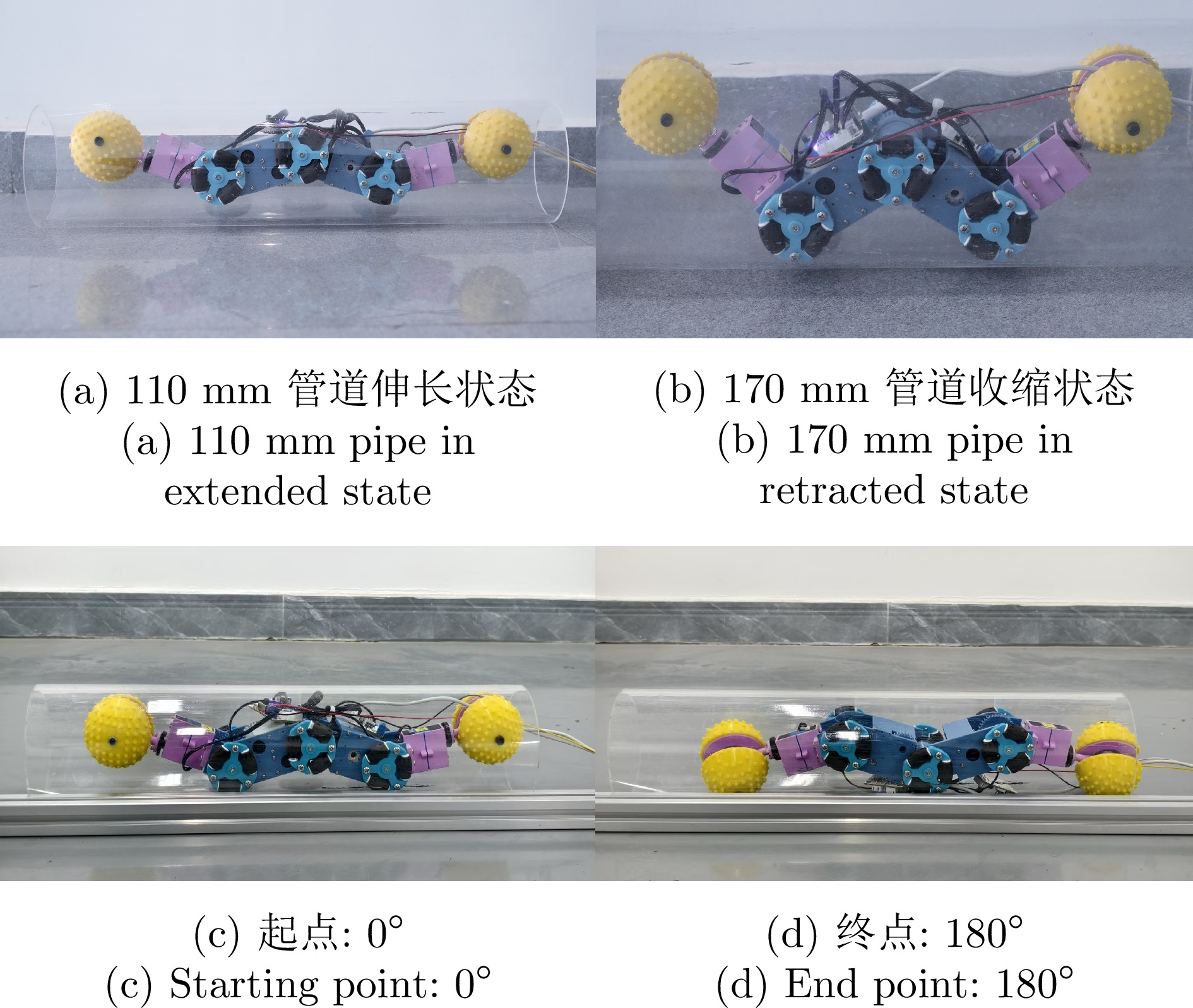
图 8 不同管径下管道机器人的状态与翻滚运动
Fig. 8 States and rolling motion of the pipeline robot under different pipe diameters
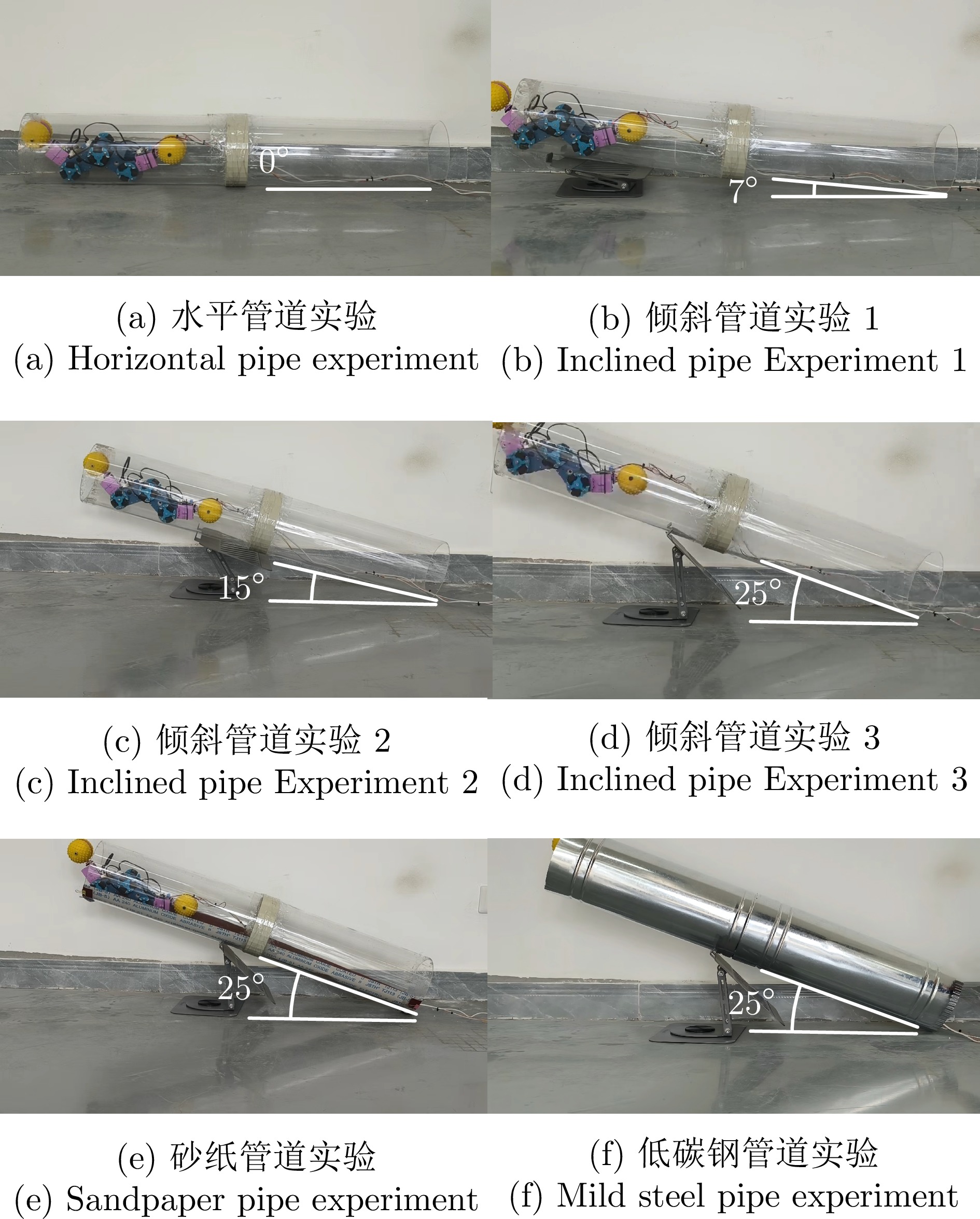
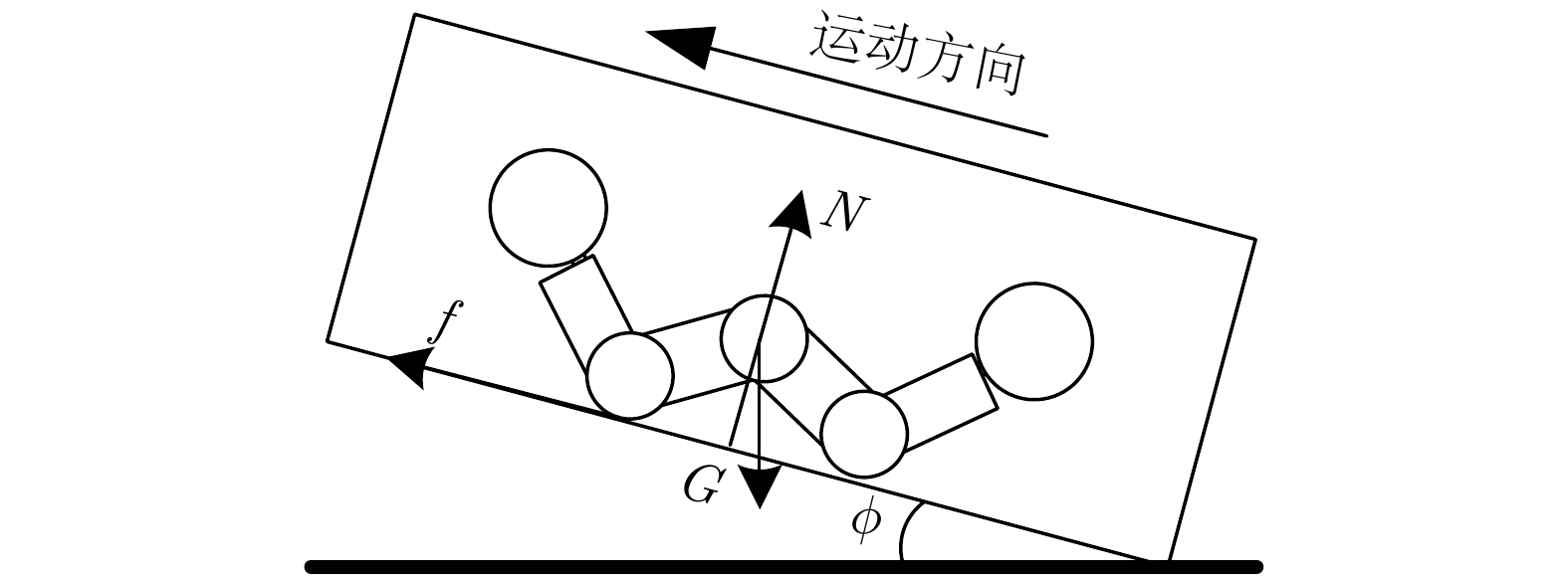
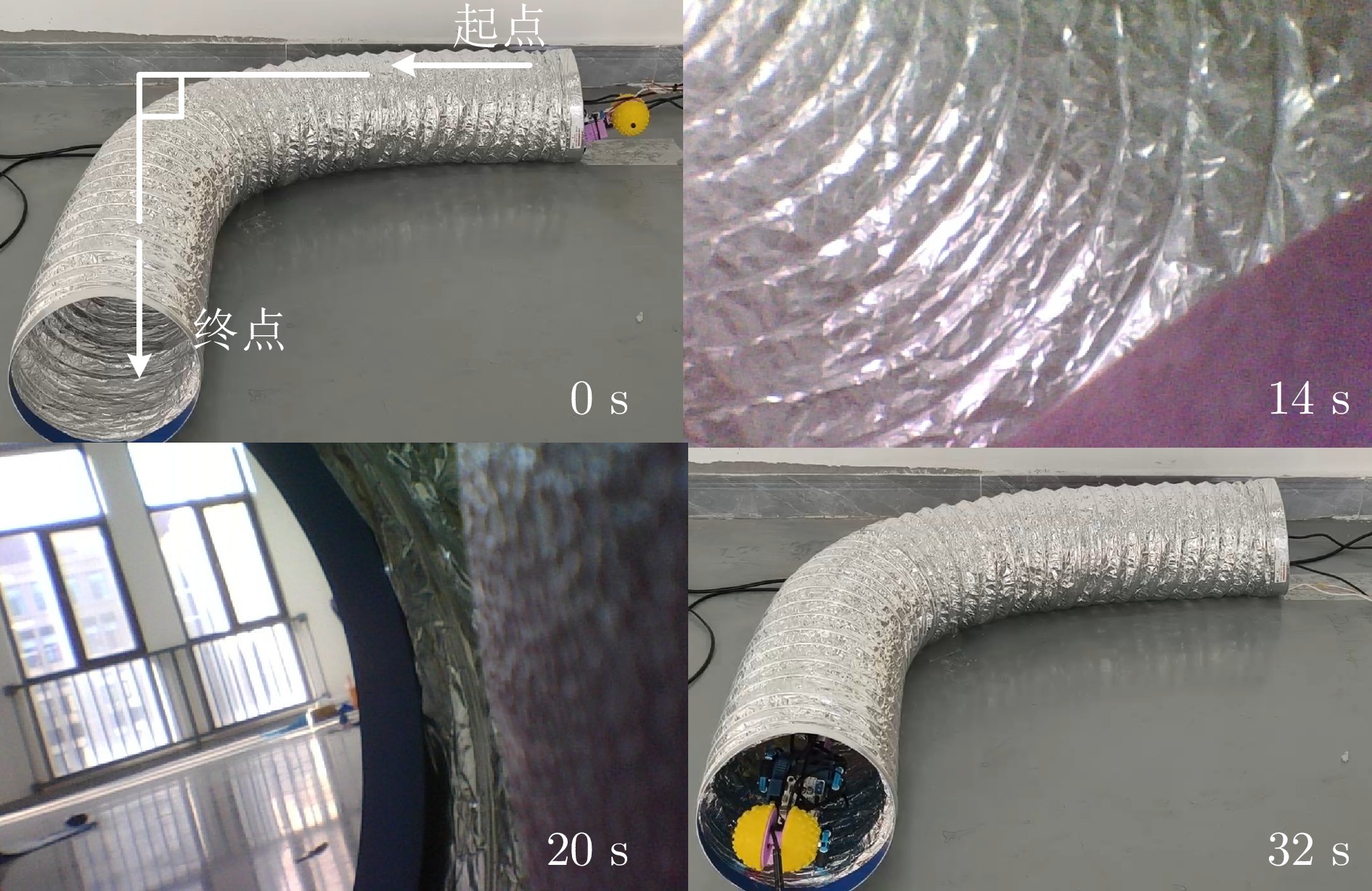
图 9 水平和倾斜管道工况下管道机器人直线运动实验
Fig. 9 Straight-line motion experiments of the pipeline robot under horizontal and inclined pipeline conditions
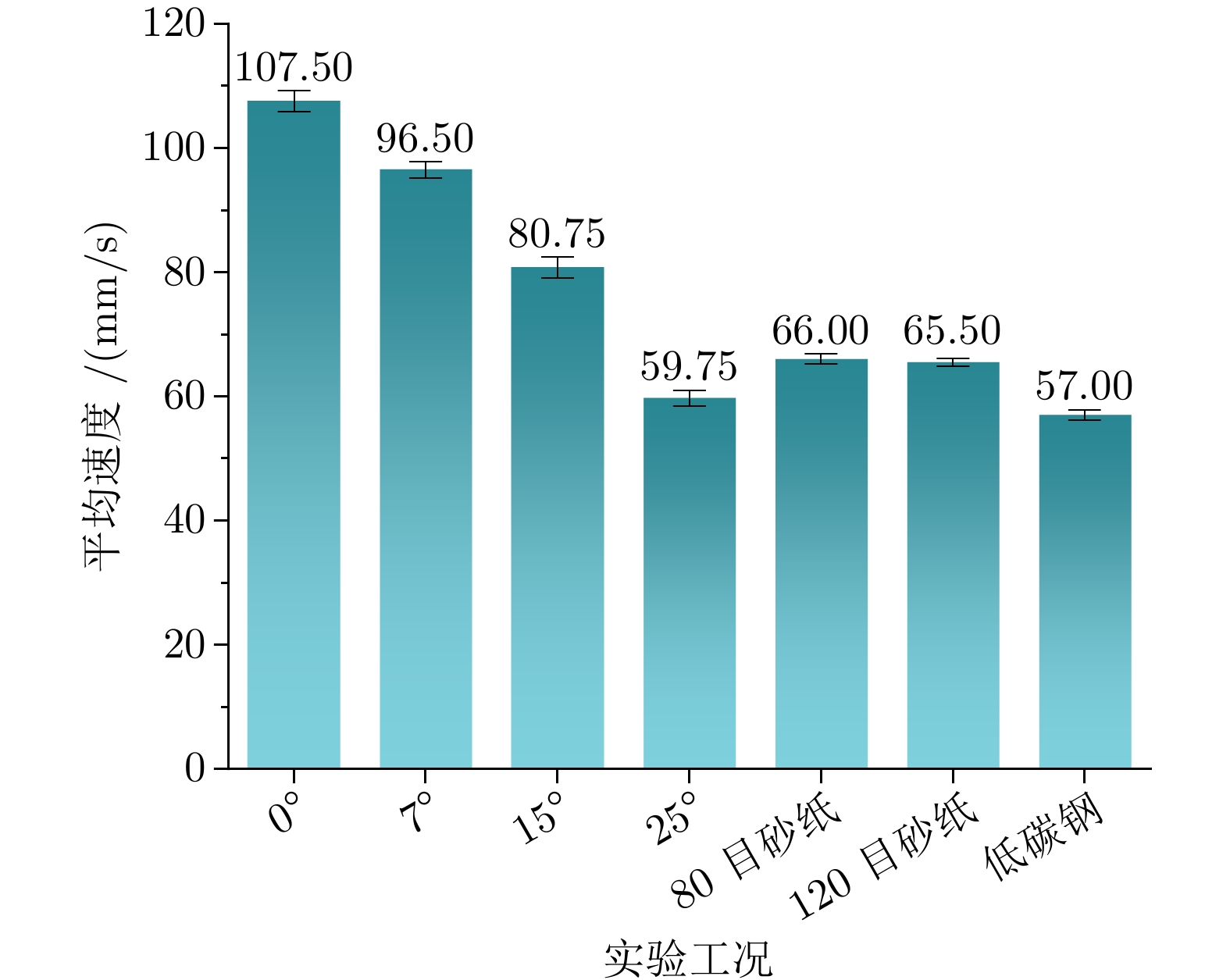
图 10 水平和倾斜管道工况下机器人运动实验结果
Fig. 10 Experimental results of robot motion under horizontal and inclined pipeline conditions
表 1 不同仿生多关节管道机器人对比分析
Table 1 Comparative analysis of different bionic multi-joint pipeline robots
 下载: 导出CSV
下载: 导出CSV
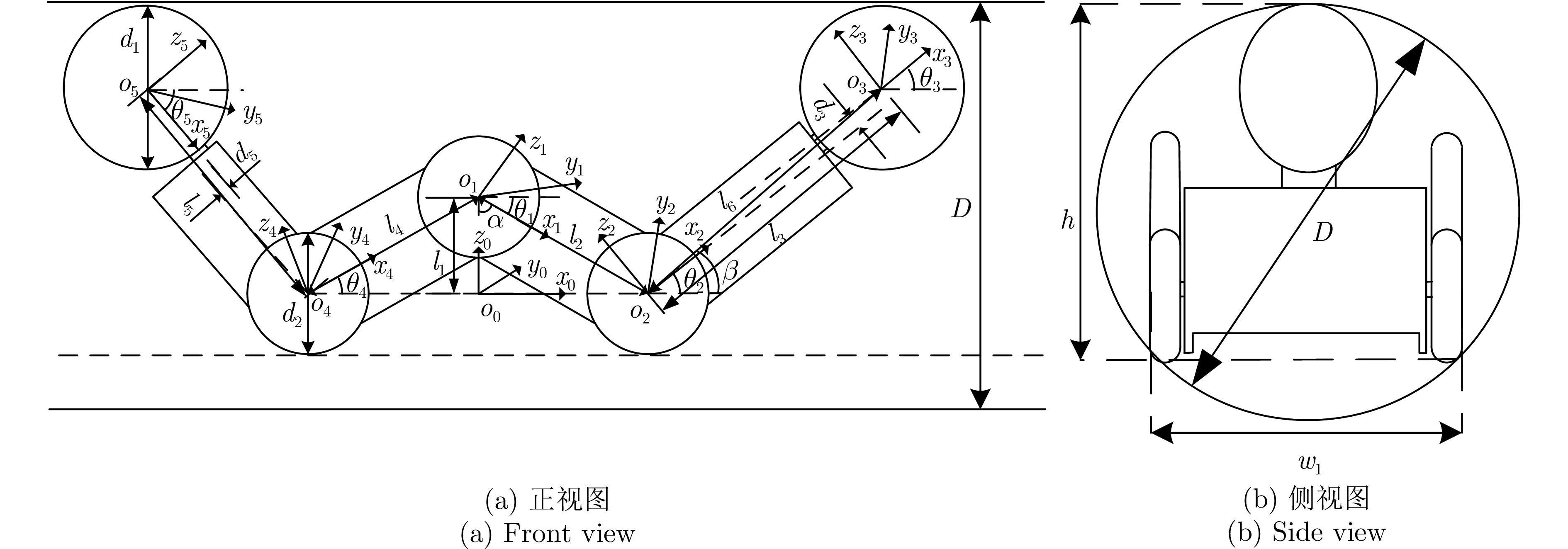
表 2 D-H参数
Table 2 D-H parameter
$i $ $a_i $ $d_i $ $\theta _i $ 1 $l_1 $ 0 $\theta _1 $ 2 $l_2 $ 0 $\theta _2 $ 3 $l_3 $ $d_3 $ $\theta _3 $ 4 $l_4 $ 0 $\theta _4 $ 5 $l_5 $ $d_5 $ $\theta _5 $
下载: 导出CSV
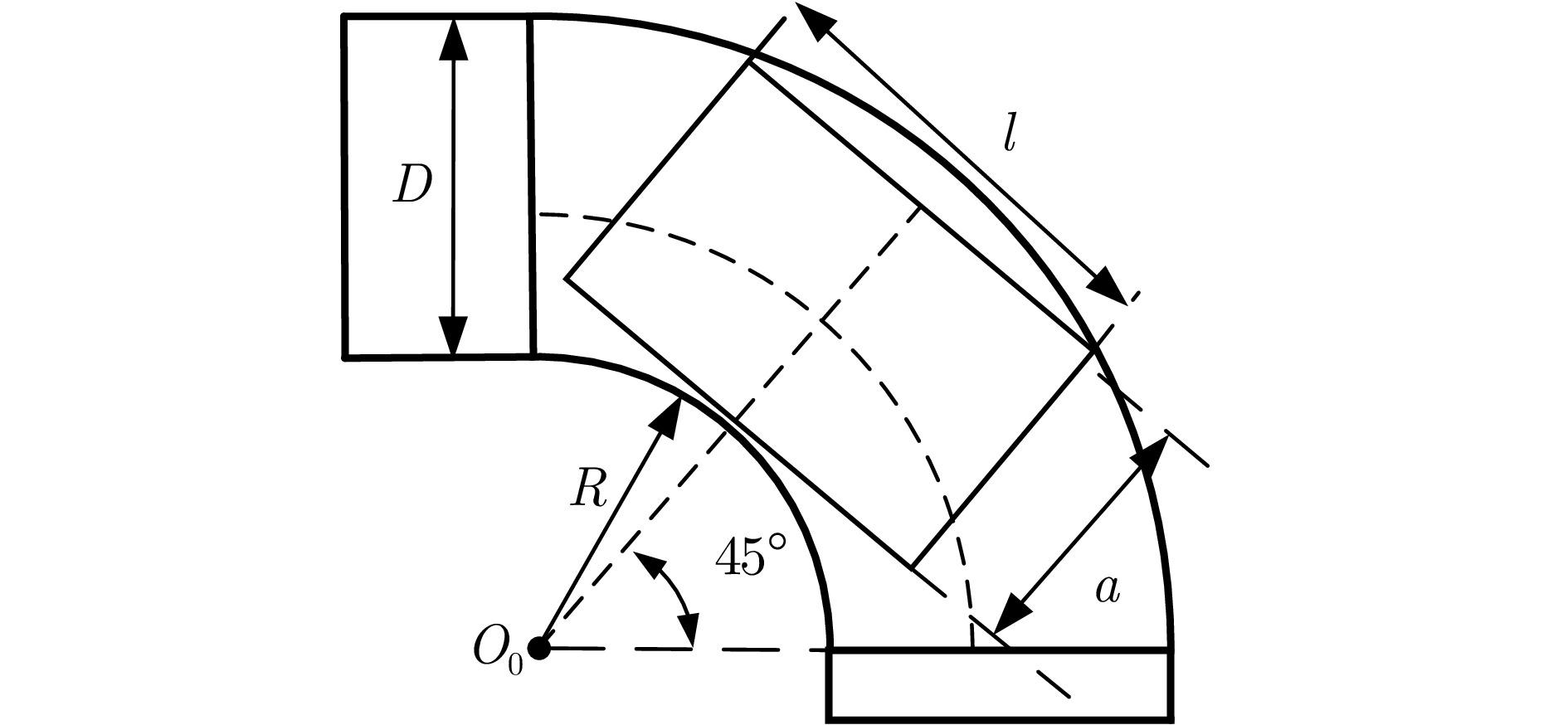
表 3 管道弯曲半径和管道内直径计算结果 (mm)
Table 3 Calculated results for pipe bending radius and inner diameter (mm)
参数 $l_{\max} $ $a_{\max} $ $R_{\min} $ 143.0 25.61 $D_{\min} $ 235.4 212.33
下载: 导出CSV
-
[1] 刘均波, 朱新民, 王立梅, 毕雅静. 全驱动小型管道机器人设计及其应用. 水利水电技术, 2025, 56(S1): 966−969 doi: 10.13928/j.cnki.wrahe.2025.S1.142Liu Jun-Bo, Zhu Xin-Min, Wang Li-Mei, Bi Ya-Jing. Full-drive miniature pipe robot design and applications. Water Resources and Hydropower Engineering, 2025, 56(S1): 966−969 doi: 10.13928/j.cnki.wrahe.2025.S1.142 [2] 郑立康, 冯永利, 李占贤, 刘振华. 自适应管径全驱式管道机器人结构设计与分析. 机械传动, 2023, 47(5): 67−73 doi: 10.16578/j.issn.1004.2539.2023.05.012Zheng Li-Kang, Feng Yong-Li, Li Zhan-Xian, Liu Zhen-Hua. Structural design and analysis of adaptive pipe diameter full drive pipeline robots. Journal of Mechanical Transmission, 2023, 47(5): 67−73 doi: 10.16578/j.issn.1004.2539.2023.05.012 [3] Verma A, Kaiwart A, Dubey N D, Naseer F, Pradhan S. A review on various types of in-pipe inspection robot. Materials Today: Proceedings, 2022, 50: 1425−1434 doi: 10.1016/j.matpr.2021.08.335 [4] Nayak A, Pradhan S K. Design of a new in-pipe inspection robot. Procedia Engineering, 2014, 97: 2081−2091 doi: 10.1016/j.proeng.2014.12.451 [5] Mohd Aras M S, Md Zain Z, Kamaruzaman A F, Rashid M Z A, Ahmad A, Shah H N M. Design and development of remotely operated pipeline inspection robot. In: Proceedings of National Technical Seminar on Unmanned System Technology. Singapore: Springer Nature Singapore, 2019. 15−23 [6] Elankavi R S, Dinakaran D, Doss A S A, Chetty R M K, Ramya M M. Design and motion planning of a wheeled type pipeline inspection robot. Journal of Robotics and Control, 2022, 3(4): 415−430 doi: 10.18196/jrc.v3i4.14742 [7] 汪洋, 焦彪彪, 陆青松, 杨晋. 管道机器人过T型管垂直爬坡动态性能分析. 中国工程机械学报, 2024, 22(2): 179−184Wang Yang, Jiao Biao-Biao, Lu Qing-Song, Yang Jin. Dynamic performance analysis of pipeline robot climbing vertically through T-tube. Chinese Journal of Construction Machinery, 2024, 22(2): 179−184 [8] 刘东, 罗亮, 卢丙举, 吴友生. 轮式变径管道机器人结构分析及控制系统设计. 舰船科学技术, 2023, 45(22): 67−71 doi: 10.3404/j.issn.1672-7649.2023.22.012Liu Dong, Luo Liang, Lu Bing-Ju, Wu You-Sheng. Mechanical structure analysis and control system design of wheeled variable diameter pipeline robot. Ship Science and Technology, 2023, 45(22): 67−71 doi: 10.3404/j.issn.1672-7649.2023.22.012 [9] Xu Z L, Lu S, Yang J, Feng Y H, Shen C T. A wheel-type in-pipe robot for grinding weld beads. Advances in Manufacturing, 2017, 5(2): 182−190 doi: 10.1007/s40436-017-0174-9 [10] Park J, Yang H. Pipeline mapping with crawler-type in-pipe robot feature. Journal of Mechanical Science and Technology, 2023, 37(10): 5015−5020 doi: 10.1007/s12206-023-0908-5 [11] Zhao W, Zhang L, Kim J. Design and analysis of independently adjustable large in-pipe robot for long-distance pipeline. Applied Sciences, 2020, 10(10): Article No. 3637 doi: 10.3390/app10103637 [12] Luedtke C, Zhou X, Tan X. A 3D-printed worm-like robot for corrugated pipes using anisotropic fins. IEEE/ASME Transactions on Mechatronics, 2025, 30(4): 3046−3053 doi: 10.1109/TMECH.2025.3569475 [13] Jiang J, Zhang F, Wang L. Soft modular pipe robot inspired by earthworm for adaptive pipeline internal structure. Smart Materials and Structures, 2024, 33(10): Article No. 105019 doi: 10.1088/1361-665X/ad74c3 [14] Jiang C, Pei Z G. An in-pipe worm robot with pneumatic actuators based on origami paper-fabric composites. Textile Research Journal, 2021, 31(5): 187−192 doi: 10.1177/00405175211016561 [15] Hayashi K, Akagi T, Dohta S, Kobayashi W, Shinohara T, Kusunose K. Improvement of pipe holding mechanism and inchworm type flexible pipe inspection robot. International Journal of Mechanical Engineering and Robotics Research, 2020, 9(6): 894−899 doi: 10.18178/ijmerr.9.6.894-899 [16] Fang D L, Jia G F, Wu J R, Niu X R, Li P, Wang R, et al. A novel worm-like in-pipe robot with the rigid and soft structure. Journal of Bionic Engineering, 2023, 20(6): 2559−2569 doi: 10.1007/s42235-023-00395-1 [17] Chen Y F, Yang D Y, Liu Z Y, Yang B Y, Wang H Q. Pipe-finder: Adaptive, lightweight pipe robot integrating origami anisotropic stiffness structure. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO). Koh Samui, Thailand: IEEE, 2023. 1−6 [18] Selvarajan A, Kumar A, Sethu D, Ramlan B M A. Design and development of a snake-robot for pipeline inspection. In: Proceedings of the IEEE Student Conference on Research and Development (SCOReD). Bandar Seri Iskandar, Malaysia: IEEE, 2019. 237−242 [19] Trebuňa F, Virgala I, Pástor M, Lipták T, Miková L. An inspection of pipe by snake robot. International Journal of Advanced Robotic Systems, 2016, 13(5): Article No. 1729881416663668 [20] Liu J W, Li M, Wang Y H, Zhao D, Deng R. Multi-gait snake robot for inspecting inner wall of a pipeline. Biomimetic Intelligence and Robotics, 2024, 4(2): Article No. 100156 doi: 10.1016/j.birob.2024.100156 [21] 于阳光, 吉爱红, 邱镓辉, 刘亚红, 秦国栋. 蛇形管道机器人设计与轨迹跟踪算法实现. 机械制造与自动化, 2024, 53(4): 201−207Yu Yang-Guang, Ji Ai-Hong, Qiu Jia-Hui, Liu Ya-Hong, Qin Guo-Dong. Design of snake robot in pipeline and implementation of trajectory tracking algorithm. Machine Building and Automation, 2024, 53(4): 201−207 [22] 陈双叶, 黄成意, 张智武, 张林, 韩默, 史思雨, 等. 蛇形供水管道机器人头部结构设计与运动学分析. 计算机测量与控制, 2023, 31(5): 187−192Chen Shuang-Ye, Huang Cheng-Yi, Zhang Zhi-Wu, Zhang Lin, Han Mo, Shi Si-Yu, et al. Structural design and kinematics analysis of snake-shaped water supply pipeline robot head. Computer Measurement and Control, 2023, 31(5): 187−192 [23] Denavit J, Hartenberg R S. A kinematic notation for lower-pair mechanisms based on matrices. Journal of Applied Mechanics. 1955, 22(2): 215−221 -

 下载:
下载:

计量
- 文章访问数: 250
- HTML全文浏览量: 94
- PDF下载量: 51
- 被引次数: 0
