

-
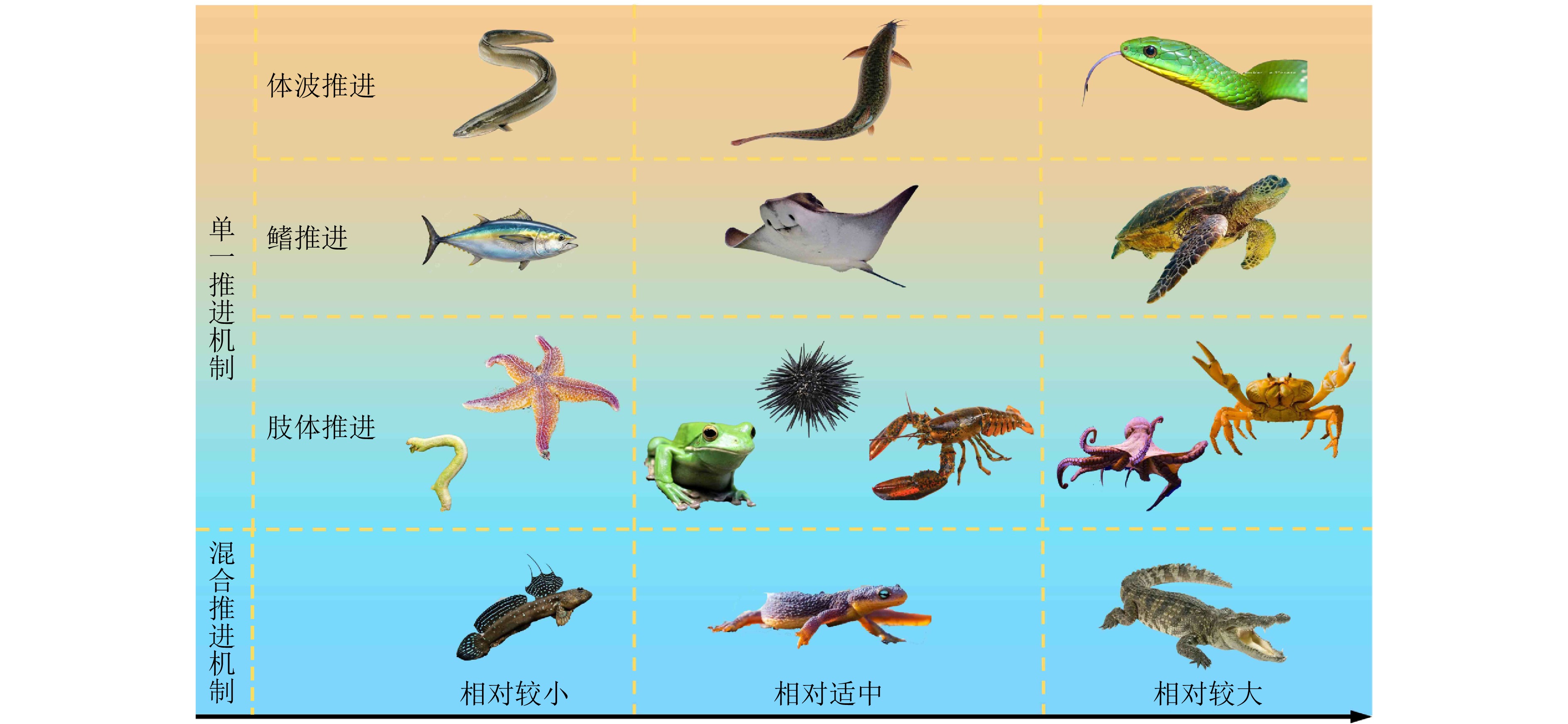
摘要: 水陆两栖机器人凭借其跨介质运动能力, 在巡检、侦察、生态监测等多个领域展现出广阔的应用前景. 仿生学通过借鉴水陆两栖动物的形态结构与运动策略, 为提升机器人的环境适应性与运动机动性提供重要的设计思路. 首先, 系统梳理具有不同形态特征的典型水陆两栖生物, 并阐明其推进机制对机器人设计所产生的双向促进作用. 其次, 以推进策略为主线, 将现有两栖机器人划分为采用统一驱动的单一推进机制(包括鳍推进、刚性肢体推进、柔性肢体推进及连续体波推进)以及采用不同驱动方式的混合推进机制, 分别介绍各类代表性仿生两栖机器人原型样机, 并分析各种推进方式在不同介质的适应性变化及效能. 随后, 总结感知、驱动与控制等关键技术的当前发展状况, 比较不同推进模式下控制策略的共性与差异. 最后, 结合跨介质多场景运动、具身智能及物理智能等前沿理念, 探讨水陆仿生两栖机器人未来的研究方向与应用前景.Abstract: Amphibious robots, capable of cross-medium locomotion, exhibit considerable potential and prospects in applications such as inspection, reconnaissance, and ecological monitoring. Drawing inspiration from the morphological structure and locomotion strategies of amphibious animals, bionics provides essential design principles for enhancing environmental adaptability and maneuverability of robots. This paper first presents a systematic review of representative amphibious organisms with diverse morphological characteristics and elucidates the bidirectional interaction between propulsion mechanisms and robotic design. Subsequently, using propulsion strategy as the primary classification criterion, existing amphibious robots are categorized into two main types. The first type utilizes unified actuation with single propulsion mechanisms, including fin propulsion, rigid limb propulsion, flexible limb propulsion, and continuous body wave propulsion. The second type adopts hybrid propulsion mechanisms that employ distinct actuation modes. Representative prototypes of bionic amphibious robots for each category are introduced, followed by an analysis of their adaptability and efficacy across different media. Furthermore, the current development state of key enabling technologies, including perception, actuation, and control, is comprehensively reviewed, and the commonalities and differences of control strategies under different propulsion modes are compared. Finally, by incorporating emerging concepts such as cross-medium multi-scenario locomotion, embodied intelligence, and physical intelligence, this paper discusses future research directions and potential application prospects for bionic amphibious robots.
-
Key words:
- amphibious robots /
- cross-medium locomotion /
- bionic robot /
- propulsion strategy
-
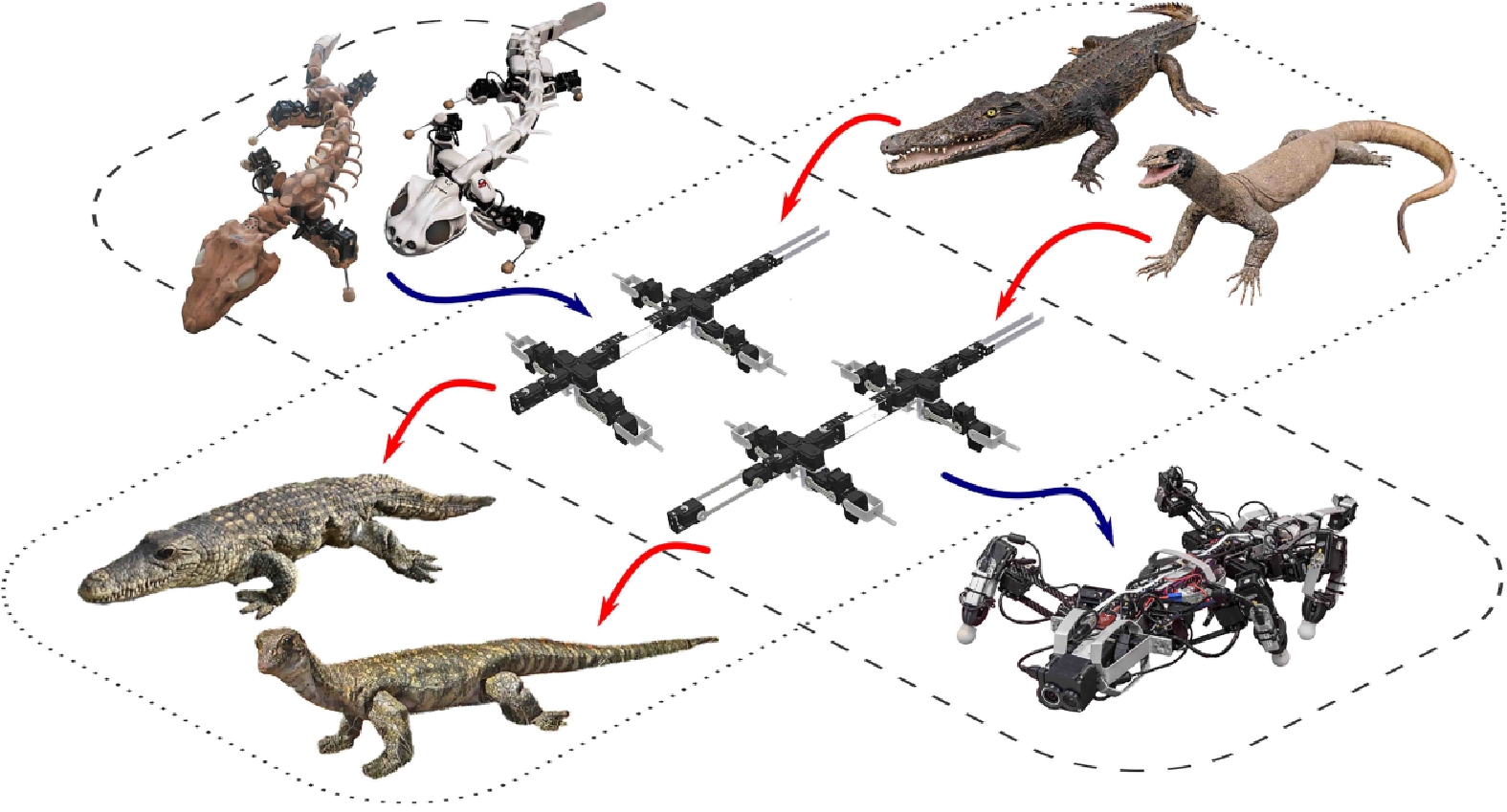
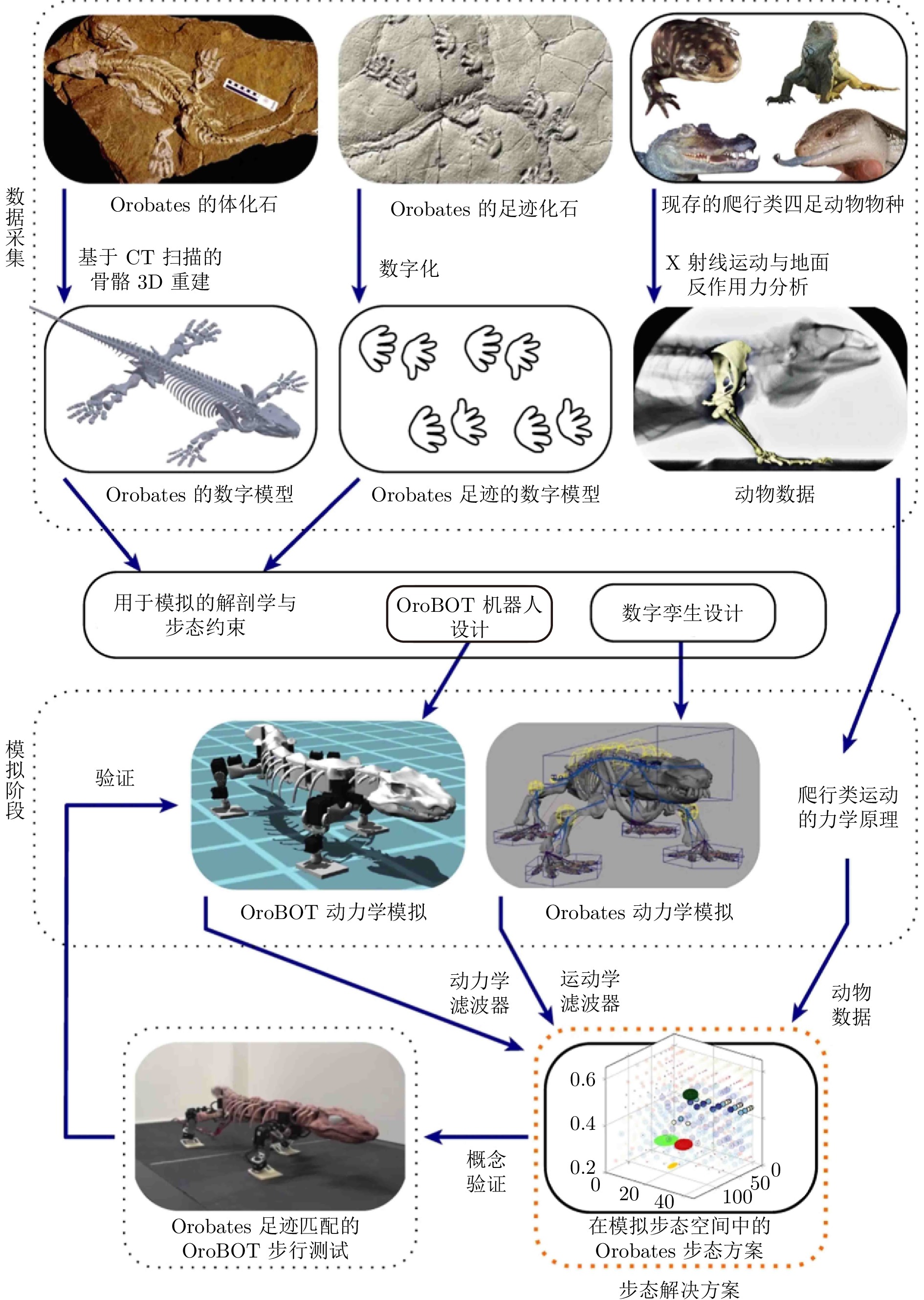
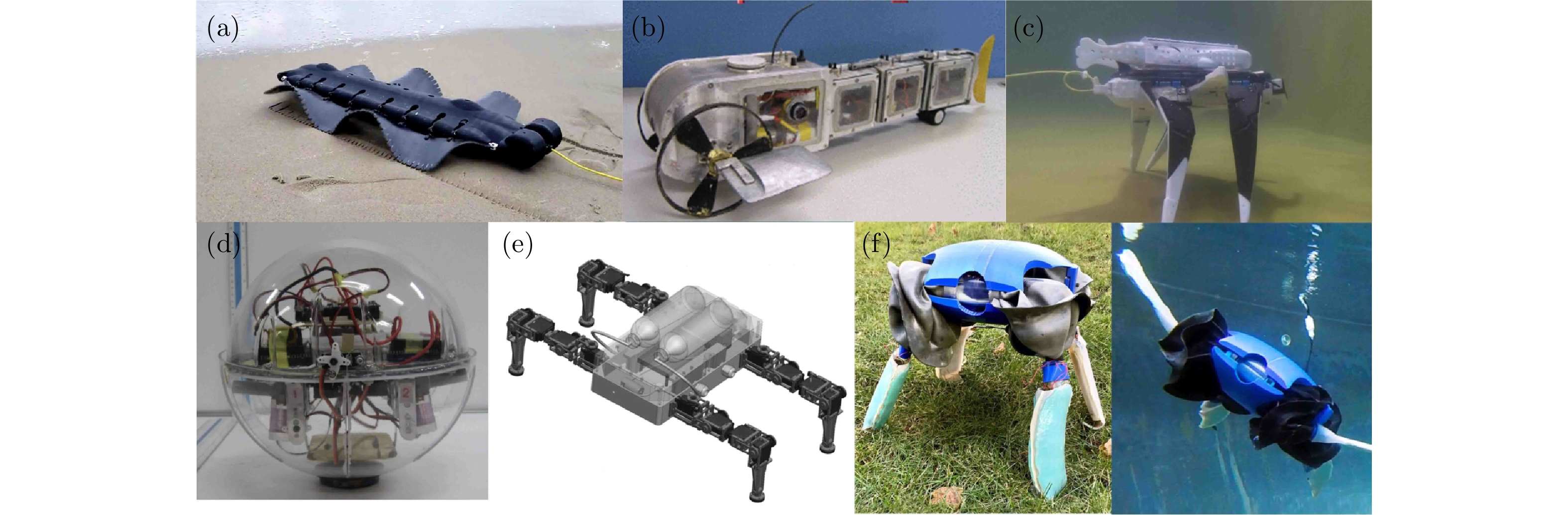
图 12 鳍推进类仿生两栖机器人[44−48], 经许可转载自文献[44−48], ©IEEE, 2009; ©Elsevier BV, 2024; ©Springer, 2017; ©Taylor & Francis Ltd., 2015; ©Springer Nature, 2017
Fig. 12 Fin-propelled bionic amphibious robots[44−48], reproduced with permission from reference [44−48], ©IEEE, 2009; ©Elsevier BV, 2024; ©Springer, 2017; ©Taylor & Francis Ltd., 2015; ©Springer Nature, 2017
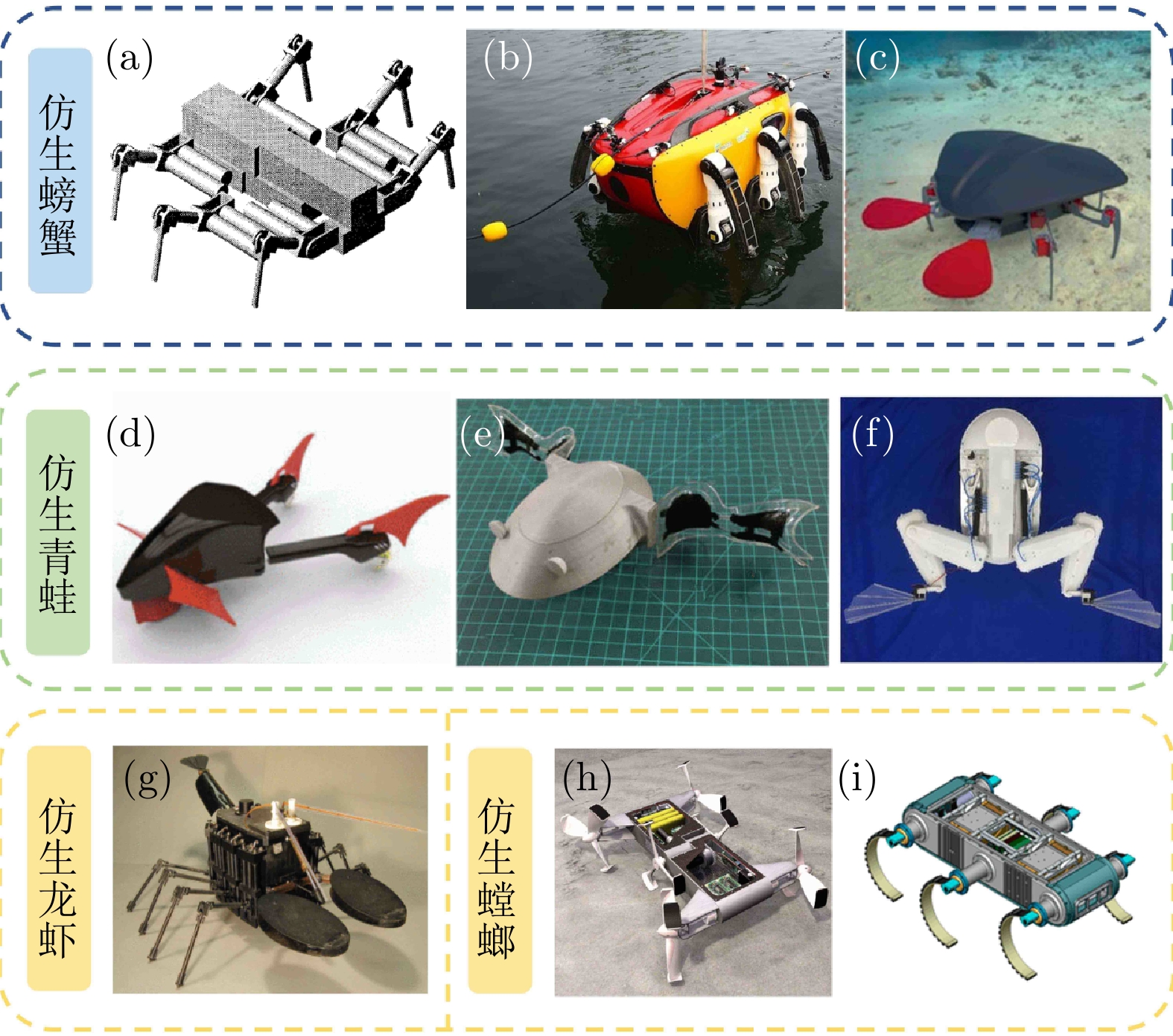
图 13 刚体推进类两栖机器人[4, 49−53, 55−56], 经许可转载自文献[4, 49−53, 55−56], ©IEEE, 1996; ©Marine Tech- nology Society, 2016; ©Elsevier, 2017; ©IEEE, 2015; ©IEEE, 2017; ©Springer, 2017; ©IEEE, 2005; ©IEEE, 2012
Fig. 13 Rigid-body propulsion amphibious ro-bots[4, 49−53, 55−56], reproduced with permission from reference [4, 49−53, 55−56], ©IEEE, 1996; ©Marine Technology Society, 2016; ©Elsevier, 2017; ©IEEE, 2015; ©IEEE, 2017; ©Springer, 2017; ©IEEE, 2005; ©IEEE, 2012
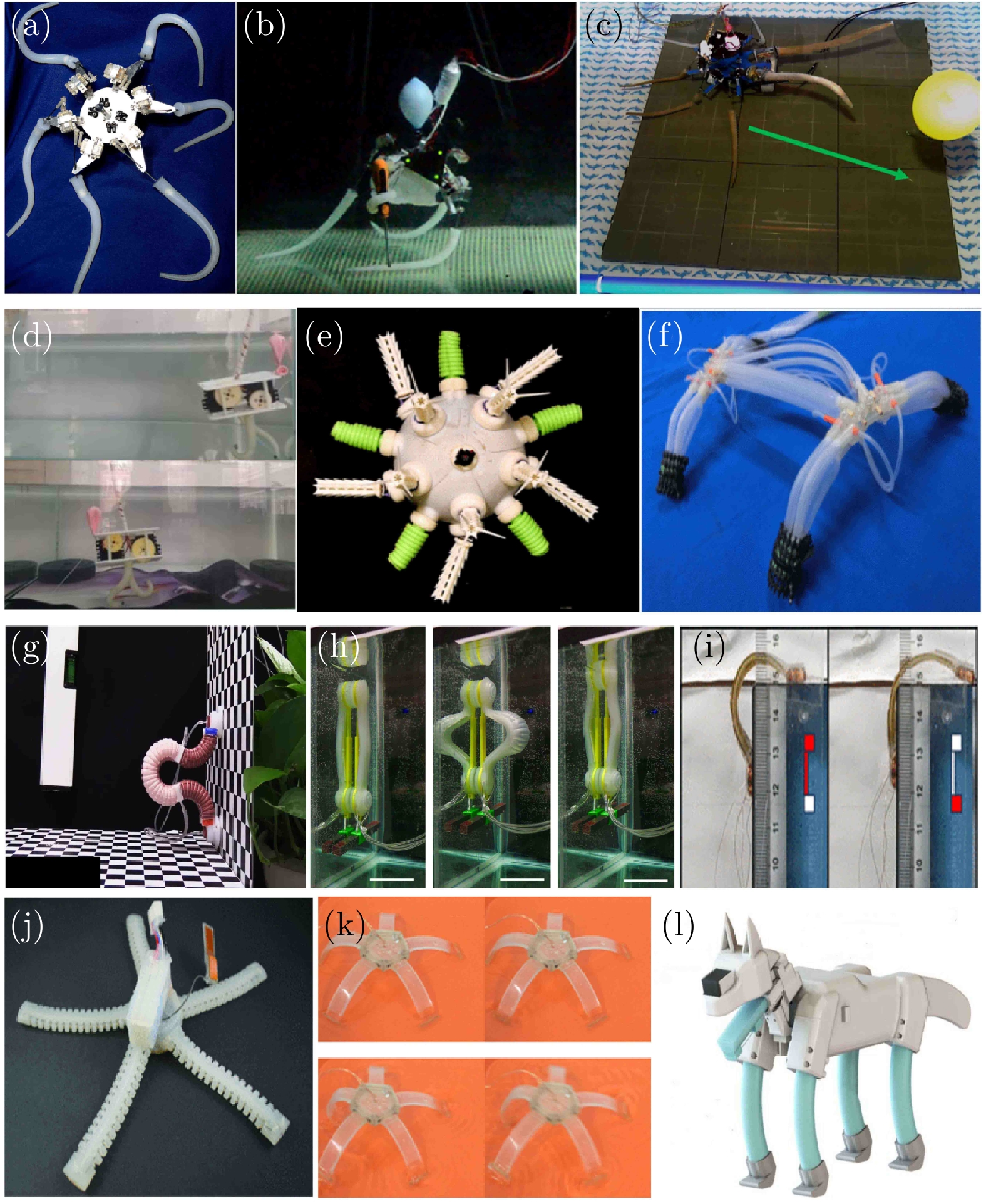
图 14 柔性肢体推进两栖机器人[6, 57−67], 经许可转载自文献 [6, 57−67], ©IOP Publishing, 2016; ©IEEE, 2013; ©IOP Publishing, 2015; ©IOP Publishing, 2015; ©IOP Publishing, 2021; ©IEEE, 2019; ©IEEE, 2017; ©IEEE, 2021; ©Mary Ann Liebert, Inc., 2018; ©IEEE, 2023; ©IEEE, 2020; ©IOP Publishing, 2019
Fig. 14 Flexible limb-propelled amphibious robots[6, 57−67], reproduced with permission from reference [6, 57−67], ©IOP Publishing, 2016; ©IEEE, 2013; ©IOP Publishing, 2015; ©IOP Publishing, 2015; ©IOP Publishing, 2021; ©IEEE, 2019; ©IEEE, 2017; ©IEEE, 2021; ©Mary Ann Liebert, Inc., 2018; ©IEEE, 2023; ©IEEE, 2020; ©IOP Publishing, 2019

图 15 连续体波推进与混合推进两栖机器人[28, 35, 40, 68−73], 经许可转载自文献[28, 35, 40, 68−73], ©Mary Ann Liebert, Inc., 2024; ©AAAS, 2007; ©The Royal Society, 2016; ©IEEE, 2007; ©AAAS, 2024; ©IEEE, 2013; ©John Wiley & Sons Inc., 2017; ©Elsevier, 2023; ©American Chemical Society, 2022
Fig. 15 Continuous body wave propulsion and hybrid pro-pulsion amphibious robots[28, 35, 40, 68−73], reproduced with permission from reference [28, 35, 40, 68−73], ©Mary Ann Liebert, Inc., 2024; ©AAAS, 2007; ©The Royal Society, 2016; ©IEEE, 2007; ©AAAS, 2024; ©IEEE, 2013; ©John Wiley & Sons Inc., 2017; ©Elsevier, 2023; ©American Chemical Society, 2022
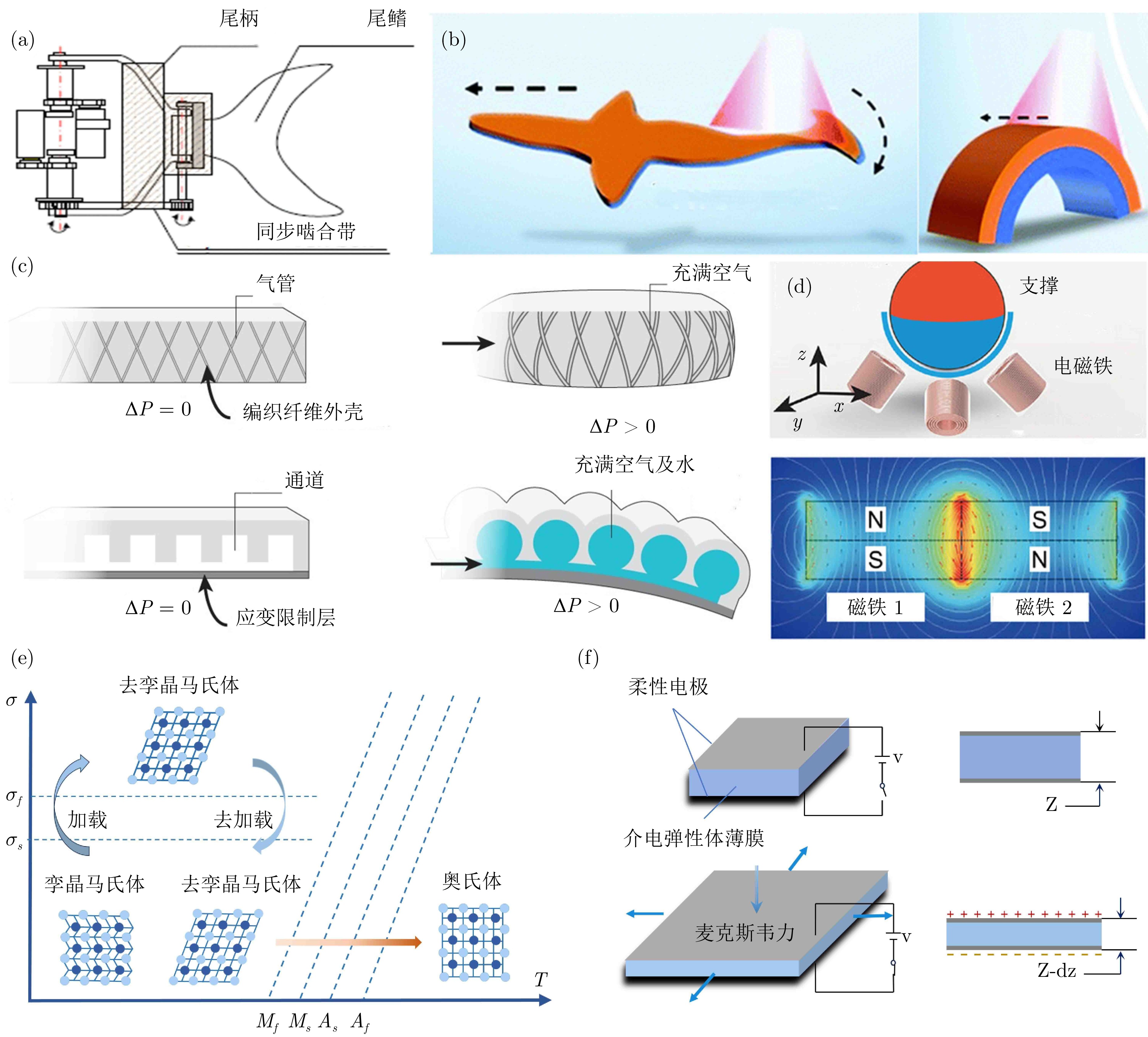
图 17 驱动方式原理图[44, 97−99], 经许可转载自文献[44, 97−99], ©IEEE, 2009; ©Royal Society of Chemistry, 2021; ©Springer Nature, 2015; ©Wiley, 2015
Fig. 17 Diagrams of actuation principles[44, 97−99], reproduced with permission from reference [44, 97−99], ©IEEE, 2009; ©Royal Society of Chemistry, 2021; ©Springer Nature, 2015; ©Wiley, 2015
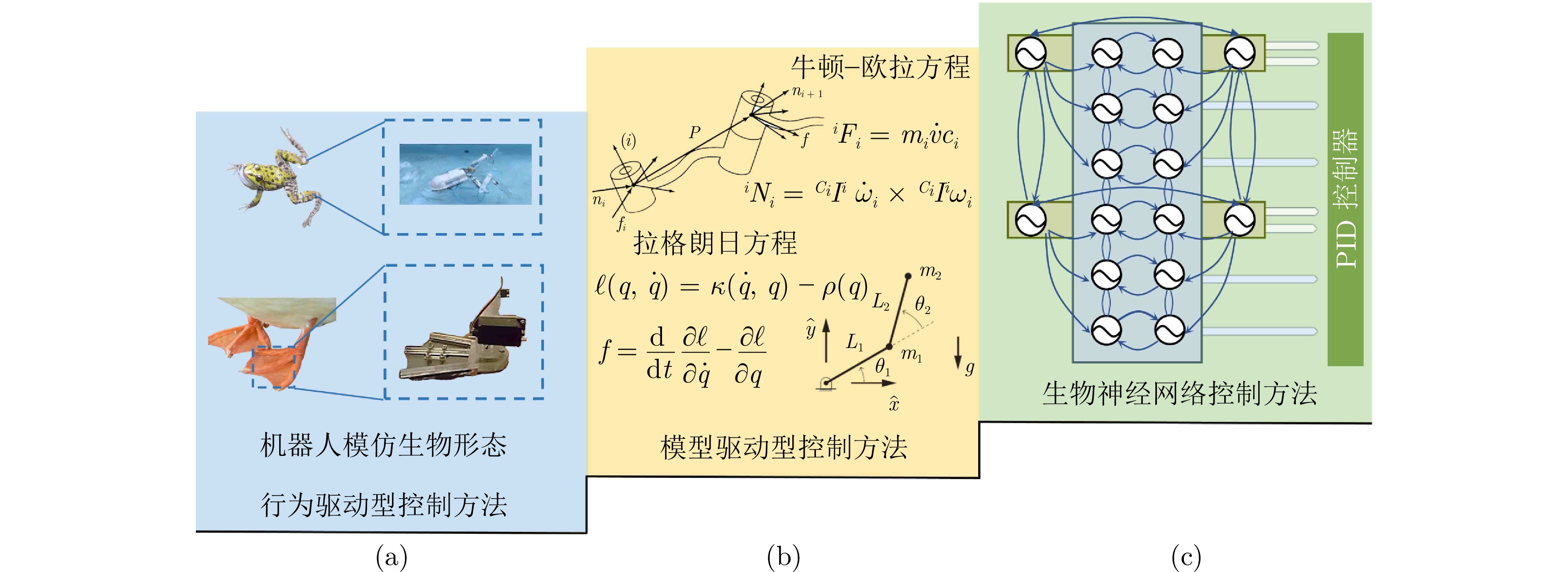
图 18 控制策略图 ((a)行为驱动型控制方法图; (b)模型驱动型控制方法图; (c)生物神经网络控制方法图)
Fig. 18 Control strategy diagrams ((a) Behavior-driven control method diagram; (b) Model-driven control method diagram; (c) Biological neural network control method diagram)
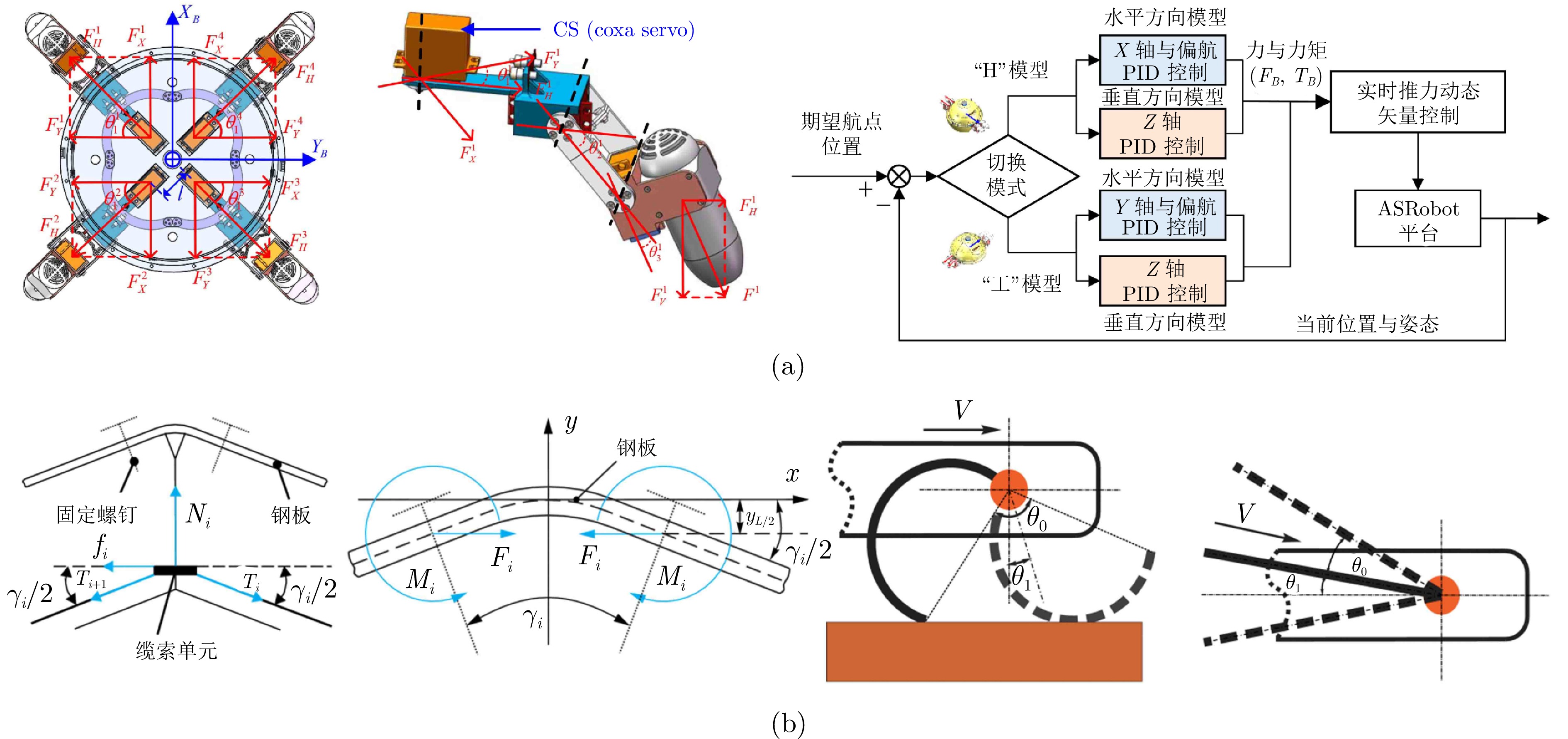
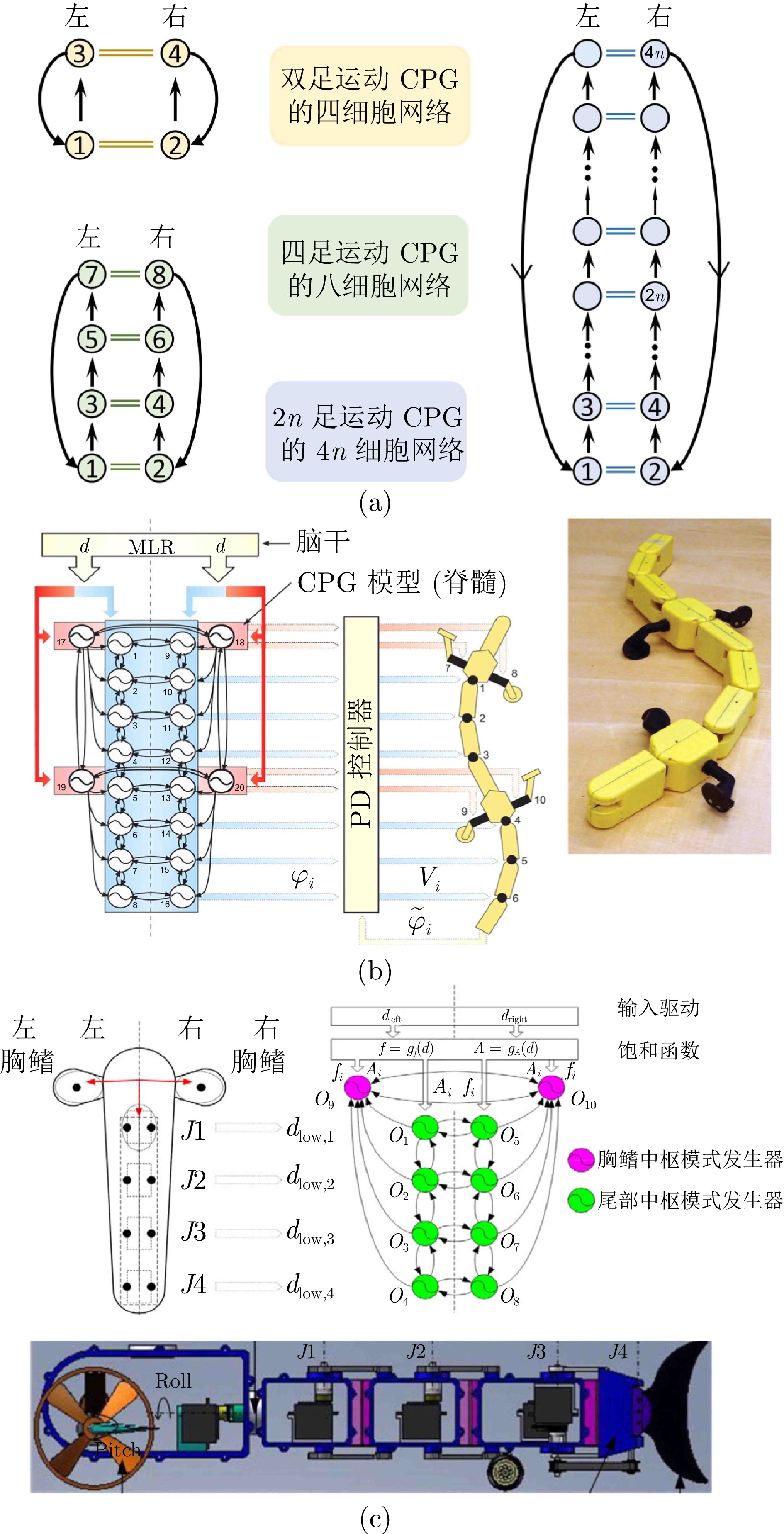
表 1 典型传感器及功能
Table 1 Typical sensors and functions
功能目标 典型传感器 作用 文献 环境识别/介质判断 水探测传感器 判定介质环境并感知流体扰动, 支持模式切换与环境适应 [76] 人工侧线 [77–78] 外界障碍/地形感知 超声/声呐测距 获取障碍与地形信息, 实现避障与路径规划 [79–80] 相机/双目/RGB-D [81–82] 红外传感器 [83] 定位与航向 IMU 提供姿态与定位信息, 保障多环境下的稳定导航 [84–85] GPS [85] 深度/压力与介质状态 压力/深度传感器 监测水压与深度, 维持水下安全与稳定 [86] 感知与运动调控 霍尔传感器 感知腿部柔顺性, 进而实现地形分类; 控制机器人前进速度 [76, 87] 接近传感器 实现微型机器人的自主抓取、避障, 辅助在复杂/狭窄空间内的操作与定位 [88–89]  下载: 导出CSV
下载: 导出CSV
表 2 驱动方式表
Table 2 Table of actuation methods
驱动类型 优势 局限性 典型案例 电机驱动 技术成熟, 控制精度较高 体积较大, 密封防水设计复杂 文献[55, 92–93] 光驱动 无接触驱动, 微型化潜力大, 空间分辨率高 能量转换效率低, 受光源照射条件限制 文献[73, 94] 流体驱动 PAM 柔顺性好, 功率重量比高, 适合复杂环境 控制精度低, 系统复杂, 气源依赖大 文献[62–63, 95] FEA 柔顺性高, 安全性好, 结构简单 推力小, 适合轻载, 控制精度受限 文献[64] 磁驱动 非接触式驱动, 密封性好, 适用于微型机器人 控制精度受磁场分布限制, 输出力矩较小 文献[61, 96] 智能材料驱动 SMA 结构紧凑, 适合微小机构 能效低, 循环疲劳寿命有限 文献[6, 66] IPMC 低电压驱动, 兼具传感与驱动功能 输出力和位移有限, 长期稳定性差 文献[88] DE 轻薄柔顺, 响应快, 适合高频驱动 需高压驱动, 封装难度大, 易介电击穿 文献[52]
下载: 导出CSV
-
[1] Nyakatura J A, Melo K, Horvat T, Karakasiliotis K, Allen V R, Andikfar A, et al. Reverse-engineering the locomotion of a stem amniote. Nature, 2019, 565(7739): 351−355 doi: 10.1038/s41586-018-0851-2 [2] Cui L, Cheong P, Adams R, Johnson T. AmBot: A bio-inspired amphibious robot for monitoring the swan-canning estuary system. Journal of Mechanical Design, 2014, 136(11): Article No. 115001 doi: 10.1115/1.4028094 [3] Tadakuma K, Tadakuma R, Aigo M, Shimojo M, Higashimori M, Kaneko M. “Omni-paddle”: Amphibious spherical rotary paddle mechanism. In: Proceedings of the IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011. 5056−5062 [4] Greiner H, Shectman A, Won C, Elsley R, Beith P. Autonomous legged underwater vehicles for near land warfare. In: Proceedings of the Symposium on Autonomous Underwater Vehicle Technology. Monterey, USA: IEEE, 1996. 41−48 [5] Chu W S, Lee K T, Song S H, Han M W, Lee J Y, Kim H S, et al. Review of biomimetic underwater robots using smart actuators. International Journal of Precision Engineering and Manufacturing, 2012, 13(7): 1281−1292 doi: 10.1007/s12541-012-0171-7 [6] Jin H, Dong E B, Alici G, Mao S X, Min X, Liu C S, et al. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires. Bioinspiration & Biomimetics, 2016, 11(5): Article No. 056012 doi: 10.1088/1748-3190/11/5/056012 [7] Shintake J, Cacucciolo V, Shea H, Floreano D. Soft biomimetic fish robot made of dielectric elastomer actuators. Soft Robotics, 2018, 5(4): 466−474 doi: 10.1089/soro.2017.0062 [8] Chang L F, Liu Y F, Yang Q, Yu L F, Liu J Q, Zhu Z C, et al. Ionic electroactive polymers used in bionic robots: A review. Journal of Bionic Engineering, 2018, 15(5): 765−782 doi: 10.1007/s42235-018-0065-1 [9] Marchese A D, Katzschmann R K, Rus D. A recipe for soft fluidic elastomer robots. Soft Robotics, 2015, 2(1): 7−25 doi: 10.1089/soro.2014.0022 [10] Chen C, Shi P J, Liu Z X, Duan S D, Si M Q, Zhang C W, et al. Advancing physical intelligence for autonomous soft robots. Science Robotics, 2025, 10(102): Article No. eads1292 doi: 10.1126/scirobotics.ads1292 [11] Bai X J, Shang J Z, Luo Z R, Jiang T, Yin Q. Development of amphibious biomimetic robots. Journal of Zhejiang University-SCIENCE A, 2022, 23(3): 157−187 doi: 10.1631/jzus.A2100137 [12] Stin V, Godoy-Diana R, Bonnet X, Herrel A. Form and function of anguilliform swimming. Biological Reviews, 2024, 99(6): 2190−2210 doi: 10.1111/brv.13116 [13] Shadwick R E, Gemballa S. Structure, kinematics, and muscle dynamics in undulatory swimming. Fish Physiology, 2005, 23: 241−280 doi: 10.1016/s1546-5098(05)23007-8 [14] Gemballa S, Vogel F. Spatial arrangement of white muscle fibers and myoseptal tendons in fishes. Comparative Biochemistry and Physiology Part A: Molecular & Integrative Physi-ology, 2002, 133(4): 1013−1037 doi: 10.1016/s1095-6433(02)00186-1 [15] Stin V, Godoy-Diana R, Bonnet X, Herrel A. Measuring the 3D wake of swimming snakes (Natrix tessellata) using volumetric particle image velocimetry. Journal of Experimental Biology, 2023, 226(13): Article No. jeb245929 doi: 10.1242/jeb.245929 [16] Tytell E D, Lauder G V. The hydrodynamics of eel swimming: I. Wake structure. Journal of Experimental Biology, 2004, 207(11): 1825−1841 [17] Gemmell B J, Fogerson S M, Costello J H, Morgan J R, Dabiri J O, Colin S P. How the bending kinematics of swimming lampreys build negative pressure fields for suction thrust. Journal of Experimental Biology, 2016, 219(24): 3884−3895 doi: 10.1242/jeb.144642 [18] Kern S, Koumoutsakos P. Simulations of optimized anguilliform swimming. Journal of Experimental Biology, 2006, 209(24): 4841−4857 doi: 10.1242/jeb.02526 [19] Jayne B C. What defines different modes of snake locomotion? Integrative and Comparative Biology, 2020, 60(1): 156−170 doi: 10.1093/icb/icaa017 [20] Kopman V, Porfiri M. Design, modeling, and characterization of a miniature robotic fish for research and education in biomimetics and bioinspiration. IEEE/ASME Transactions on Mech-atronics, 2013, 18(2): 471−483 doi: 10.1109/TMECH.2012.2222431 [21] Menzer A, Gong Y C, Fish F E, Dong H B. Bio-inspired propulsion: Towards understanding the role of pectoral fin kinematics in manta-like swimming. Biomimetics, 2022, 7(2): Article No. 45 doi: 10.3390/biomimetics7020045 [22] Burke A C. Development of the turtle carapace: Implications for the evolution of a novel bauplan. Journal of Morphology, 1989, 199(3): 363−378 doi: 10.1002/jmor.1051990310 [23] Mayerl C J, Capano J G, Moreno A A, Wyneken J, Blob R W, Brainerd E L. Pectoral and pelvic girdle rotations during walking and swimming in a semi-aquatic turtle: Testing functional role and constraint. Journal of Experimental Biology, 2019, 222(24): Article No. jeb212688 doi: 10.1242/jeb.212688 [24] Leavey A, Richards C T, Porro L B. Comparative muscle anatomy of the anuran pelvis and hindlimb in relation to locomotor mode. Journal of Anatomy, 2024, 245(5): 751−774 doi: 10.1111/joa.14122 [25] Clemente C J, Richards C. Muscle function and hydrodynamics limit power and speed in swimming frogs. Nature Communications, 2013, 4(1): Article No. 2737 doi: 10.1038/ncomms3737 [26] Astley H C, Roberts T J. Evidence for a vertebrate catapult: Elastic energy storage in the plantaris tendon during frog jumping. Biology Letters, 2012, 8(3): 386−389 doi: 10.1098/rsbl.2011.0982 [27] Okamoto E, van Mai H, Ishimatsu A, Tanaka M. Modification of pectoral fins occurs during the larva-to-juvenile transition in the mudskipper (Periophthalmus modestus). Zoological Letters, 2018, 4: Article No. 23 doi: 10.1186/s40851-018-0105-z [28] Ning L X H, Limpabandhu C, Tse Z T H. Amphibian-inspired locomotion strategy for a slime-based magnetic soft robot. Robotics Reports, 2024, 2(1): 152−165 doi: 10.1089/rorep.2024.0039 [29] Pace C M, Gibb A C. Mudskipper pectoral fin kinematics in aquatic and terrestrial environments. Journal of Experimental Biology, 2009, 212(14): 2279−2286 doi: 10.1242/jeb.029041 [30] Deeg K E, Sears I B, Aizenman C D. Development of multisensory convergence in the Xenopus optic tectum. Journal of Neurophysiology, 2009, 102(6): 3392−3404 doi: 10.1152/jn.00632.2009 [31] Navarro-Guerrero N, Toprak S, Josifovski J, Jamone L. Visuo-haptic object perception for robots: An overview. Autonomous Robots, 2023, 47(4): 377−403 doi: 10.1007/s10514-023-10091-y [32] Cohen A H, Wallén P. The neuronal correlate of locomotion in fish. “Fictive swimming” induced in an in vitro preparation of the lamprey spinal cord. Experimental Brain Research, 1980, 41(1): 11−18 [33] Combes D. Metamorphosing motor networks. Current Biology, 2019, 29(12): R557−R561 doi: 10.1016/j.cub.2019.05.005 [34] Sillar K T, Simmers J, Combes D. From tadpole to adult frog locomotion. Current Opinion in Neurobiology, 2023, 82: Article No. 102753 doi: 10.1016/j.conb.2023.102753 [35] Ijspeert A J, Crespi A, Ryczko D, Cabelguen J M. From swimming to walking with a salamander robot driven by a spinal cord model. Science, 2007, 315(5817): 1416−1420 doi: 10.1126/science.1138353 [36] Ijspeert A J. Amphibious and sprawling locomotion: From biology to robotics and back. Annual Review of Control, Robotics, and Autonomous Systems, 2020, 3(1): 173−193 doi: 10.1146/annurev-control-091919-095731 [37] Suzuki S, Kano T, Ijspeert A J, Ishiguro A. Spontaneous gait transitions of sprawling quadruped locomotion by sensory-driven body-limb coordination mechanisms. Frontiers in Neurorobotics, 2021, 15: Article No. 645731 doi: 10.3389/fnbot.2021.645731 [38] Wang J, Zheng J Y, Zhao Y H, Yang K. Structure design and coordinated motion analysis of bionic crocodile robot. Biomimetic Intelligence and Robotics, 2024, 4(2): Article No. 100157 doi: 10.1016/j.birob.2024.100157 [39] Li L, Qin B Y, Gao W Z, Li Y Y, Zhang Y Y, Wang B, et al. Bioinspired underwater soft robots: From biology to robotics and back. arXiv preprint arXiv: 2508.11883, 2025. [40] Karakasiliotis K, Thandiackal R, Melo K, Horvat T, Mahabadi N K, Tsitkov S, et al. From cineradiography to biorobots: An approach for designing robots to emulate and study animal locomotion. Journal of the Royal Society Interface, 2016, 13(119): Article No. 20151089 doi: 10.1098/rsif.2015.1089 [41] Melo K, Horvat T, Ijspeert A J. Animal robots in the African wilderness: Lessons learned and outlook for field robotics. Science Robotics, 2023, 8(85): Article No. eadd8662 doi: 10.1126/scirobotics.add8662 [42] Floyd S, Sitti M. Design and development of the lifting and propulsion mechanism for a biologically inspired water runner robot. IEEE Transactions on Robotics, 2008, 24(3): 698−709 doi: 10.1109/TRO.2008.924258 [43] Maladen R D, Ding Y, Umbanhowar P B, Kamor A, Goldman D I. Mechanical models of sandfish locomotion reveal principles of high performance subsurface sand-swimming. Journal of the Royal Society Interface, 2011, 8(62): 1332−1345 doi: 10.1098/rsif.2010.0678 [44] Wang W B, Yu J Z, Ding R, Tan M. Bio-inspired design and realization of a novel multimode amphibious robot. In: Proceedings of the IEEE International Conference on Automation and Logistics. Shenyang, China: IEEE, 2009. 140−145 [45] Asada T, Furuhashi H. Development of a manta ray robot with underwater walking function. Ocean Engineering, 2024, 308: Article No. 118261 doi: 10.1016/j.oceaneng.2024.118261 [46] Shi L W, Guo S X, Mao S L, Yue C F, Li M X, Asaka K. Development of an amphibious turtle-inspired spherical mother robot. Journal of Bionic Engineering, 2013, 10(4): 446−455 doi: 10.1016/S1672-6529(13)60248-6 [47] Han B, Luo X, Wang X J, Chen X D. Mechanism design and gait experiment of an amphibian robotic turtle. Advanced Robotics, 2011, 25(16): 2083−2097 doi: 10.1163/016918611X590300 [48] Baines R, Patiballa S K, Booth J, Ramirez L, Sipple T, Garcia A, et al. Multi-environment robotic transitions through adaptive morphogenesis. Nature, 2022, 610(7931): 283−289 doi: 10.1038/s41586-022-05188-w [49] Yoo S Y, Shim H, Jun B H, Park J Y, Lee P M. Design of walking and swimming algorithms for a multi-legged underwater robot Crabster CR200. Marine Technology Society Journal, 2016, 50(5): 74−87 doi: 10.4031/MTSJ.50.5.8 [50] Wang G, Chen X, Yang S X, Jia P, Yan X Y, Xie J. Subsea crab bounding gait of leg-paddle hybrid driven shoal crablike robot. Mechatronics, 2017, 48: 1−11 doi: 10.1016/j.mechatronics.2017.10.002 [51] Yang Y, Zhou G, Zhang J Q, Cheng S Y, Fu M Y. Design, modeling and control of a novel amphibious robot with dual-swing-legs propulsion mechanism. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015. 559−566 [52] Tang Y C, Qin L, Li X N, Chew C M, Zhu J. A frog-inspired swimming robot based on dielectric elastomer actuators. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canada: IEEE, 2017. 2403−2408 [53] Fan J Z, Zhang W, Kong P C, Cai H G, Liu G F. Design and dynamic model of a frog-inspired swimming robot powered by pneumatic muscles. Chinese Journal of Mechanical Engineering, 2017, 30(5): 1123−1132 doi: 10.1007/s10033-017-0182-5 [54] Ayers J, Witting J, Olcott C, Mcgruer N, Massa D. Lobster robots. In: Proceedings of the International Symposium on Aqua Biomechanisms. Tokai, Japan: 2000. [55] Boxerbaum A S, Werk P, Quinn R D, Vaidyanathan R. Design of an autonomous amphibious robot for surf zone operation: Part I mechanical design for multi-mode mobility. In: Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Monterey, USA: IEEE, 2005. 1459−1464 [56] Liang X, Xu M, Xu L C, Liu P, Ren X S, Kong Z W, et al. The AmphiHex: A novel amphibious robot with transformable leg-flipper composite propulsion mechanism. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, 2012. 3667−3672 [57] Arienti A, Calisti M, Giorgio-Serchi F, Laschi C. PoseiDRONE: Design of a soft-bodied ROV with crawling, swimming and manipulation ability. In: Proceedings of the OCE-ANS Conference. San Diego, USA: IEEE, 2013. 1−7 [58] Calisti M, Corucci F, Arienti A, Laschi C. Dynamics of underwater legged locomotion: Modeling and experiments on an octopus-inspired robot. Bioinspiration & Biomimetics, 2015, 10(4): Article No. 046012 doi: 10.1088/1748-3190/10/4/046012 [59] Cianchetti M, Calisti M, Margheri L, Kuba M, Laschi C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspiration & Biomimetics, 2015, 10(3): Article No. 035003 doi: 10.1088/1748-3190/10/3/035003 [60] Wu Q X, Yang X C, Wu Y, Zhou Z J, Wang J, Zhang B T, et al. A novel underwater bipedal walking soft robot bio-inspired by the coconut octopus. Bioinspiration & Biomimetics, 2021, 16(4): Article No. 046007 [61] Paschal T, Bell M A, Sperry J, Sieniewicz S, Wood R J, Weaver J C. Design, fabrication, and characterization of an untethered amphibious sea urchin-inspired robot. IEEE Robotics and Automation Letters, 2019, 4(4): 3348−3354 doi: 10.1109/LRA.2019.2926683 [62] Faudzi A A M, Razif M R M, Endo G, Nabae H, Suzumori K. Soft-amphibious robot using thin and soft McKibben actuator. In: Proceedings of the IEEE International Conference on Adva-nced Intelligent Mechatronics (AIM). Munich, Germany: IEEE, 2017. 981−986 [63] Zhang Y F, Yang D Z, Yan P N, Zhou P W, Zou J, Gu G Y. Inchworm inspired multimodal soft robots with crawling, climbing, and transitioning locomotion. IEEE Transactions on Robotics, 2022, 38(3): 1806−1819 doi: 10.1109/TRO.2021.3115257 [64] Tang Y C, Zhang Q T, Lin G J, Yin J. Switchable adhesion actuator for amphibious climbing soft robot. Soft Robotics, 2018, 5(5): 592−600 doi: 10.1089/soro.2017.0133 [65] Li L, Xu J W, Li Q Y, Jiang Y Y, Dong X, Ding J N. Small multi-attitude soft amphibious robot. IEEE Robotics and Automation Letters, 2024, 9(2): 1067−1073 doi: 10.1109/LRA.2023.3331673 [66] Patterson Z J, Sabelhaus A P, Chin K, Hellebrekers T, Majidi C. An untethered brittle star-inspired soft robot for closed-loop underwater locomotion. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, USA: IEEE, 2020. 8758−8764 [67] Li Y Q, Fish F, Chen Y H, Ren T, Zhou J S. Bio-inspired robotic dog paddling: Kinematic and hydro-dynamic analysis. Bioinspiration & Biomimetics, 2019, 14(6): Article No. 066008 doi: 10.1088/1748-3190/ab3d05 [68] Ijspeert A J, Crespi A. Online trajectory generation in an amphibious snake robot using a lamprey-like central pattern generator model. In: Proceedings of the IEEE International Conference on Robotics and Automation. Rome, Italy: IEEE, 2007. 262−268 [69] Vaquero T S, Daddi G, Thakker R, Paton M, Jasour A, Strub M P, et al. EELS: Autonomous snake-like robot with task and motion planning capabilities for ice world exploration. Science Robotics, 2024, 9(88): Article No. eadh8332 doi: 10.1126/scirobotics.adh8332 [70] Crespi A, Karakasiliotis K, Guignard A, Ijspeert A J. Salamandra robotica II: An amphibious robot to study salamander-like swimming and walking gaits. IEEE Transactions on Robotics, 2013, 29(2): 308−320 doi: 10.1109/TRO.2012.2234311 [71] Liu C J, Wang J W, Liu Z Y, Zhao Z J, Zhang G Q. Design and movement mechanism analysis of a multiple degree of freedom bionic crocodile robot based on the characteristic of “death roll”. Journal of Field Robotics, 2024, 41(8): 2650−2662 doi: 10.1002/rob.22380 [72] Lin Z L, Zheng W, Zhang J H, Ou W Z, Yang C, Huang H B, et al. Mudskipper-inspired amphibious robotic fish enhances locomotion performance by pectoral-caudal fins coordination. Cell Reports Physical Science, 2023, 4(10): Article No. 101589 doi: 10.1016/j.xcrp.2023.101589 [73] Xiang Y Y, Li B, Li B H, Bao L Y, Sheng W B, Ma Y F, et al. Toward a multifunctional light-driven biomimetic mudskipper-like robot for various application scenarios. ACS Applied Materials & Interfaces, 2022, 14(17): 20291−20302 doi: 10.1021/acsami.2c03852 [74] Yamada H, Chigisaki S, Mori M, Takita K, Ogami K, Hirose S. Development of amphibious snake-like robot ACM-R5. In: Proceedings of the 36th International Symposium on Robotics. Tokyo, Japan: Japan Robot Association (JARA), 2005. [75] Liu A, Zhang X R, Huang H Z, Xiao F Q, Zhang Z, Cui G M, et al. An intelligent bionic amphibious turtle robot with visual-tactile fusion for dynamic terrain adaptation. IEEE Transactions on Robotics, 2025, 41: 6345−6363 doi: 10.1109/TRO.2025.3626512 [76] Kashem S B A, Jawed S, Ahmed J, Qidwai U. Design and implementation of a quadruped amphibious robot using duck feet. Robotics, 2019, 8(3): Article No. 77 doi: 10.3390/robotics8030077 [77] Zheng X W, Wang W, Li L, Xie G M. Artificial lateral line based relative state estimation between an upstream oscillating fin and a downstream robotic fish. Bioinspiration & Biomimetics, 2021, 16(1): Article No. 016012 doi: 10.1088/1748-3190/abb86c [78] Luo R L, Li C X, Wang F. Underwater motion target recognition using artificial lateral line system and artificial neural network method. Ocean Engineering, 2024, 303: Article No. 117757 doi: 10.1016/j.oceaneng.2024.117757 [79] Bianchi G, Lanzetti L, Mariana D, Cinquemani S. Bioinspired design and experimental validation of an aquatic snake robot. Biomimetics, 2024, 9(2): Article No. 87 doi: 10.3390/biomimetics9020087 [80] Li C Y, Guo S X, Guo J. Evaluation of obstacle avoidance performance for spherical underwater robots using the ultrasonic sensor. In: Proceedings of the IEEE International Conference on Mechatronics and Automation. Guilin, China: IEEE, 2022. 1294−1299 [81] Guo S X, Pan S W, Shi L W, Guo P, He Y L, Tang K. Visual detection and tracking system for a spherical amphibious robot. Sensors, 2017, 17(4): Article No. 870 doi: 10.3390/s17040870 [82] Xing H M, Shi L W, Tang K, Guo S X, Hou X H, Liu Y, et al. Robust RGB-D camera and IMU fusion-based cooperative and relative close-range localization for multiple turtle-inspired amphibious spherical robots. Journal of Bionic Engineering, 2019, 16(3): 442−454 doi: 10.1007/s42235-019-0036-1 [83] Li M X, Guo S X, Hirata H, Ishihara H. Design and performance evaluation of an amphibious spherical robot. Robotics and Autonomous Systems, 2015, 64: 21−34 doi: 10.1016/j.robot.2014.11.007 [84] An R C, Guo S X, Gu S X, Zheng L. Improvement and evaluation for the stability of mobile spherical underwater robots (SUR III). In: Proceedings of the IEEE International Conference on Mechatronics and Automation. Tianjin, China: IEEE, 2019. 2512−2517 [85] Liu Y, Guo S X, Shi L W, Xing H M, Hou X H, Liu H K, et al. Multi-sensor fusion based localization system for an amphibious spherical robot. In: Proceedings of the IEEE International Conference on Mechatronics and Automation. Tianjin, China: IEEE, 2019. 2523−2528 [86] Xing H M, Guo S X, Shi L W, Pan S W, He Y L, Tang K, et al. Kalman filter-based navigation system for the amphibious spherical robot. In: Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA). Takamatsu, Japan: IEEE, 2017. 638−643 [87] Grezmak J, Graf N, Behr A, Daltorio K. Terrain classification based on sensed leg compliance for amphibious crab robot. IEEE Sensors Journal, 2021, 21(20): 23308−23316 doi: 10.1109/JSEN.2021.3109864 [88] Li M X, Guo S X, Guo J, Hirata H, Ishihara H. Development of a biomimetic underwater microrobot for a father-son robot system. Microsystem Technologies, 2017, 23(4): 849−861 doi: 10.1007/s00542-016-2817-3 [89] Shi L W, Guo S X, Mao S L, Li M X, Asaka K. Development of a lobster-inspired underwater microrobot. International Jou-rnal of Advanced Robotic Systems, 2013, 10(1): Article No. 44 doi: 10.5772/54868 [90] Zhai Y F, Zheng X W, Chao L M, Li S K, Xiong M L, Jia Y X, et al. An interpretable approach to estimate the self-motion in fish-like robots using mode decomposition analysis. Nature Communications, 2025, 16(1): Article No. 3887 doi: 10.1038/s41467-025-58880-6 [91] Wang S Y, Xu P, Wang X Y, Zheng J X, Liu X Y, Liu J H, et al. Underwater bionic whisker sensor based on triboelectric nanogenerator for passive vortex perception. Nano Energy, 2022, 97: Article No. 107210 doi: 10.1016/j.nanoen.2022.107210 [92] Zhang S W, Liang X, Xu L C, Xu M. Initial development of a novel amphibious robot with transformable fin-leg composite propulsion mechanisms. Journal of Bionic Engineering, 2013, 10(4): 434−445 doi: 10.1016/S1672-6529(13)60247-4 [93] Dudek G, Giguere P, Prahacs C, Saunderson S, Sattar J, Torres-Mendez L A, et al. AQUA: An amphibious autonomous robot. Computer, 2007, 40(1): 46−53 doi: 10.1109/mc.2007.6 [94] Zhu P F, Shang K D, Huang Y P, Jiang Z B, Zhou J, Lu X L, et al. Light-driven amphibious mini soft robot mimicking the locomotion gait of inchworm and water strider. Advanced Intelligent Systems, 2024, 6(1): Article No. 2300466 doi: 10.1002/aisy.202300466 [95] Zhao W C, Zhang Y, Yang L J, Wang N, Peng L H. Research and implementation of pneumatic amphibious soft bionic robot. Machines, 2024, 12(6): Article No. 393 doi: 10.3390/machines12060393 [96] Bell M A, Weaver J C, Wood R J. An ambidextrous starfish-inspired exploration and reconnaissance robot (the ASTER-bot). Soft Robotics, 2022, 9(5): 991−1000 doi: 10.1089/soro.2021.0053 [97] Chen Y H, Yang J J, Zhang X, Feng Y Y, Zeng H, Wang L, et al. Light-driven bimorph soft actuators: Design, fabrication, and properties. Materials Horizons, 2021, 8(3): 728−757 doi: 10.1039/D0MH01406K [98] Rus D, Tolley M T. Design, fabrication and control of soft robots. Nature, 2015, 521(7553): 467−475 doi: 10.1038/nature14543 [99] Deng Q Y, Li H G, Zhu H J, Yang L, Li W, Yin X B, et al. Spatiotemporal modulation of magnetization in magnetic soft materials. Advanced Materials, 2025, 37(48): Article No. e06342 doi: 10.1002/adma.202506342 [100] Carpi F, Frediani G, Gerboni C, Gemignani J, de Rossi D. Enabling variable-stiffness hand rehabilitation orthoses with die-lectric elastomer transducers. Medical Engineering & Physics, 2014, 36(2): 205−211 doi: 10.1016/j.medengphy.2013.10.015 [101] Follador M, Tramacere F, Mazzolai B. Dielectric elastomer actuators for octopus inspired suction cups. Bioinspiration & Biomimetics, 2014, 9(4): Article No. 046002 doi: 10.1088/1748-3182/9/4/046002 [102] Wegst U G K, Bai H, Saiz E, Tomsia A P, Ritchie R O. Bioinspired structural materials. Nature Materials, 2015, 14(1): 23−36 doi: 10.1038/nmat4089 [103] Fan J Z, Wang S Q, Wang Y, Li G, Zhao J, Liu G F. Research on frog-inspired swimming robot driven by pneumatic muscles. Robotica, 2022, 40(5): 1527−1537 doi: 10.1017/S0263574721001247 [104] Li D F, Wang C, Deng H B, Wei Y R. Motion planning algorithm of a multi-joint snake-like robot based on improved serpenoid curve. IEEE Access, 2020, 8: 8346−8360 doi: 10.1109/ACCESS.2020.2964486 [105] Li D F, Pan Z H, Deng H B, Hu L Y. Adaptive path following controller of a multijoint snake robot based on the improved serpenoid curve. IEEE Transactions on Industrial Electronics, 2022, 69(4): 3831−3842 doi: 10.1109/TIE.2021.3075851 [106] Wang C, Peng Y B, Li D F, Pan Z H, Deng H B, Li D G, et al. Turning strategy of snake-like robot based on serpenoid curve under cloud assisted smart conditions. Cluster Computing, 2019, 22(S6): 13041−13053 doi: 10.1007/s10586-017-1192-x [107] Xu L S, Cao K, Wei X M, Shi Y G. Dynamics analysis of fluid-structure interaction for a biologically-inspired biped robot running on water. International Journal of Advanced Robotic Systems, 2013, 10(10): Article No. 373 doi: 10.5772/57097 [108] Vogel A R, Kaipa K N, Krummel G M, Bruck H A, Gupta S K. Design of a compliance assisted quadrupedal amphibious robot. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE, 2014. 2378−2383 [109] Luo F Y, Xie G M, Wang Q N, Wang L. Development and gait analysis of five-bar mechanism implemented quadruped amphibious robot. In: Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Montreal, Canada: IEEE, 2010. 633−638 [110] Klein M A, Boxerbaum A S, Quinn R D, Harkins R, Vaidyanathan R. SeaDog: A rugged mobile robot for surf-zone applications. In: Proceedings of the 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob). Rome, Italy: IEEE, 2012. 1335−1340 [111] Xing H M, Shi L W, Hou X H, Liu Y, Hu Y, Xia D B, et al. Design, modeling and control of a miniature bio-inspired amphibious spherical robot. Mechatronics, 2021, 77: Article No. 102574 doi: 10.1016/j.mechatronics.2021.102574 [112] Harkins R, Ward J, Vaidyanathan R, Boxerbaum A X, Quinn R D. Design of an autonomous amphibious robot for surf zone operations: Part II-hardware, control implementation and simulation. In: Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Monterey, USA: IEEE, 2005. 1465−1470 [113] Zhang S W, Zhou Y C, Xu M, Liang X, Liu J M, Yang J. AmphiHex-I: Locomotory performance in amphibious environments with specially designed transformable flipper legs. IEEE/ASME Transactions on Mechatronics, 2016, 21(3): 1720−1731 doi: 10.1109/TMECH.2015.2490074 [114] Ijspeert A J. Central pattern generators for locomotion control in animals and robots: A review. Neural Networks, 2008, 21(4): 642−653 doi: 10.1016/j.neunet.2008.03.014 [115] Golubitsky M, Stewart I, Buono P L, Collins J J. Symmetry in locomotor central pattern generators and animal gaits. Nature, 1999, 401(6754): 693−695 doi: 10.1038/44416 [116] Matsuo T, Yokoyama T, Ueno D, Ishii K. Biomimetic motion control system based on a CPG for an amphibious multi-link mobile robot. Journal of Bionic Engineering, 2008, 5(1): 91−97 doi: 10.1016/s1672-6529(08)60078-5 [117] Ding R, Yu J Z, Yang Q H, Tan M. Dynamic modelling of a CPG-controlled amphibious biomimetic swimming robot. International Journal of Advanced Robotic Systems, 2013, 10(4): Article No. 199 doi: 10.5772/56059 [118] Howard D, Eiben A E, Kennedy D F, Mouret J B, Valencia P, Winkler D. Evolving embodied intelligence from materials to machines. Nature Machine Intelligence, 2019, 1(1): 12−19 doi: 10.1038/s42256-018-0009-9 [119] Dong H X, Yang H T, Ding S, Li T, Yu H Y. Bioinspired amphibious origami robot with body sensing for multimodal locomotion. Soft Robotics, 2022, 9(6): 1198−1209 doi: 10.1089/soro.2021.0118 [120] Yao Q F, Meng L H, Zhang Q F, Zhao J, Pajarinen J, Wang X H, et al. Learning-based propulsion control for amphibious quadruped robots with dynamic adaptation to changing environment. IEEE Robotics and Automation Letters, 2023, 8(12): 7889−7896 doi: 10.1109/LRA.2023.3323893 -

 下载:
下载:

计量
- 文章访问数: 950
- HTML全文浏览量: 643
- PDF下载量: 159
- 被引次数: 0
