

GRU-based Modeling for Predicting Guidewire Trajectories in Interventional Robotics With Morphological Feature Fusion
-
摘要: 针对介入导航场景中的导丝轨迹重建问题, 提出一种保持因果性的序列估计方法. 不同于通用循环基线模型, 所提方法将序列级常量特征 (包括导丝刚度、进入角度和有效摩擦描述符) 按时间步广播, 与动态几何量(中心线坐标、直径等)拼接, 经两层特征编码后由单向门控循环单元解码器逐时输出二维坐标. 为处理变长序列, 本文采用时间步长分类的训练策略, 并结合掩码损失函数, 以抑制填充引入的无效梯度, 在不改变网络结构的前提下提升训练与推理效率. 基于覆盖多类导丝与多进入角度的仿体实验平台, 所提方法在保持因果性的同时, 实现0.40 ~ 0.54 mm的位置误差范围(平均误差为0.46 mm); 相较于未采用时间步分类策略的基线模型, 收敛epoch降低42%, 训练时间降低52%, 单次推理时延降低51%. 结果表明, 该方法可为导丝轨迹估计与术中导航提供可部署的算法基础.Abstract: We present a causality-preserving sequential estimator for guidewire trajectory reconstruction during interventional navigation. Unlike generic recurrent baselines, the proposed model time-broadcasts sequence-level constants (including guidewire stiffness, insertion angle, and an effective friction descriptor) and concatenates them with dynamic geometric tokens (centerline coordinates and local diameter) before a two-stage feature encoder and a unidirectional gated recurrent unit decoder that emits 2D positions stepwise. To cope with variable sequence lengths, we adopt a time-step length classification training strategy with mask-based loss function, which limits padding-induced invalid gradients and improves training and inference efficiency without altering the network architecture. On a phantom platform covering multiple guidewire types and insertion angles, the method achieves a 0.40 ~ 0.54 mm position-error range (mean 0.46 mm) while preserving strict causality; relative to a baseline without the time-step classification strategy, it reduces epochs-to-convergence by 42%, training time by 52%, and per-inference latency by 51%. These results indicate a deployable, real-time basis for guidewire trajectory estimation and intraoperative navigation.
-
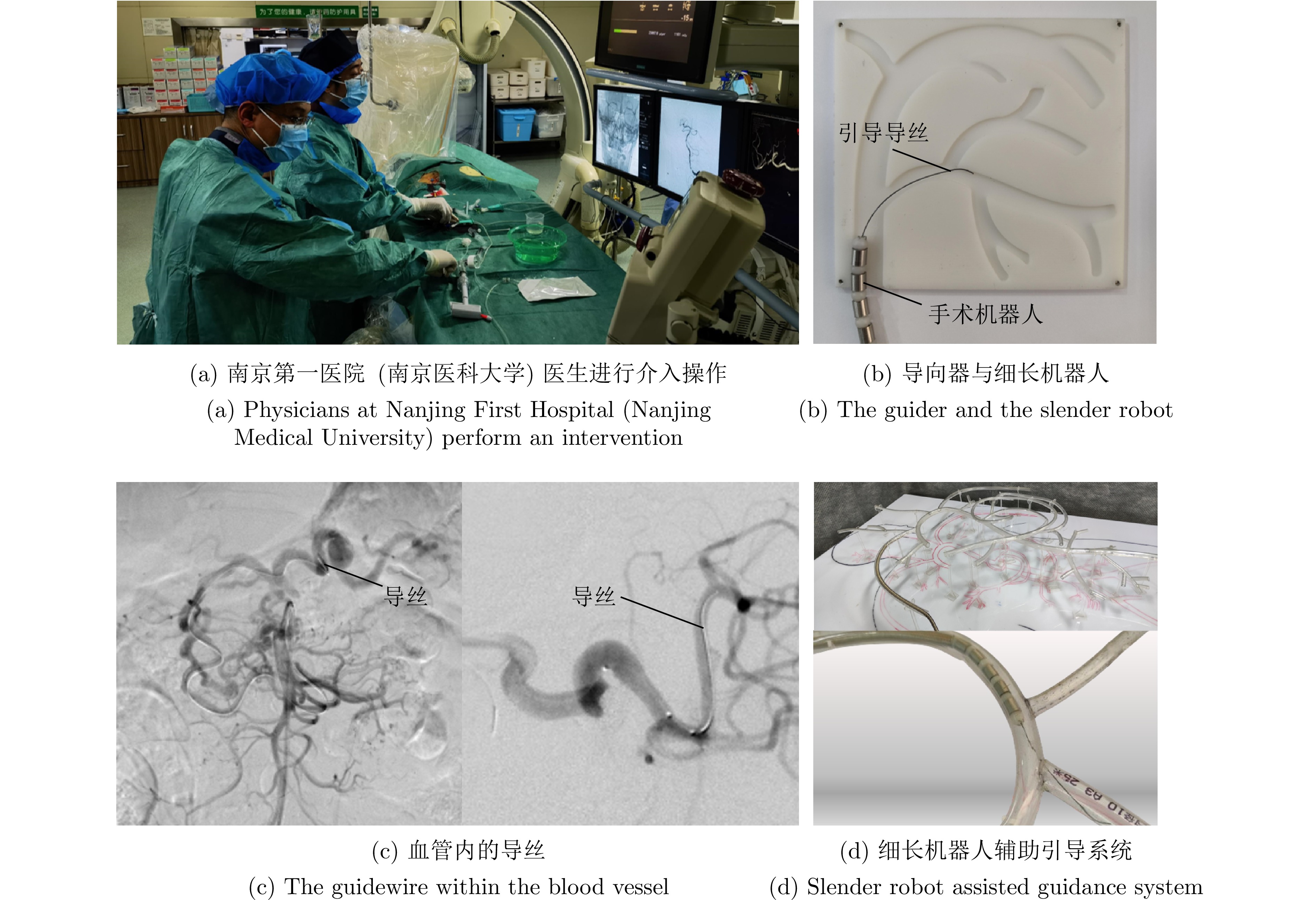
图 1 血管内介入与细长机器人辅助引导系统
Fig. 1 Endovascular intervention and slender robot assisted guidance system
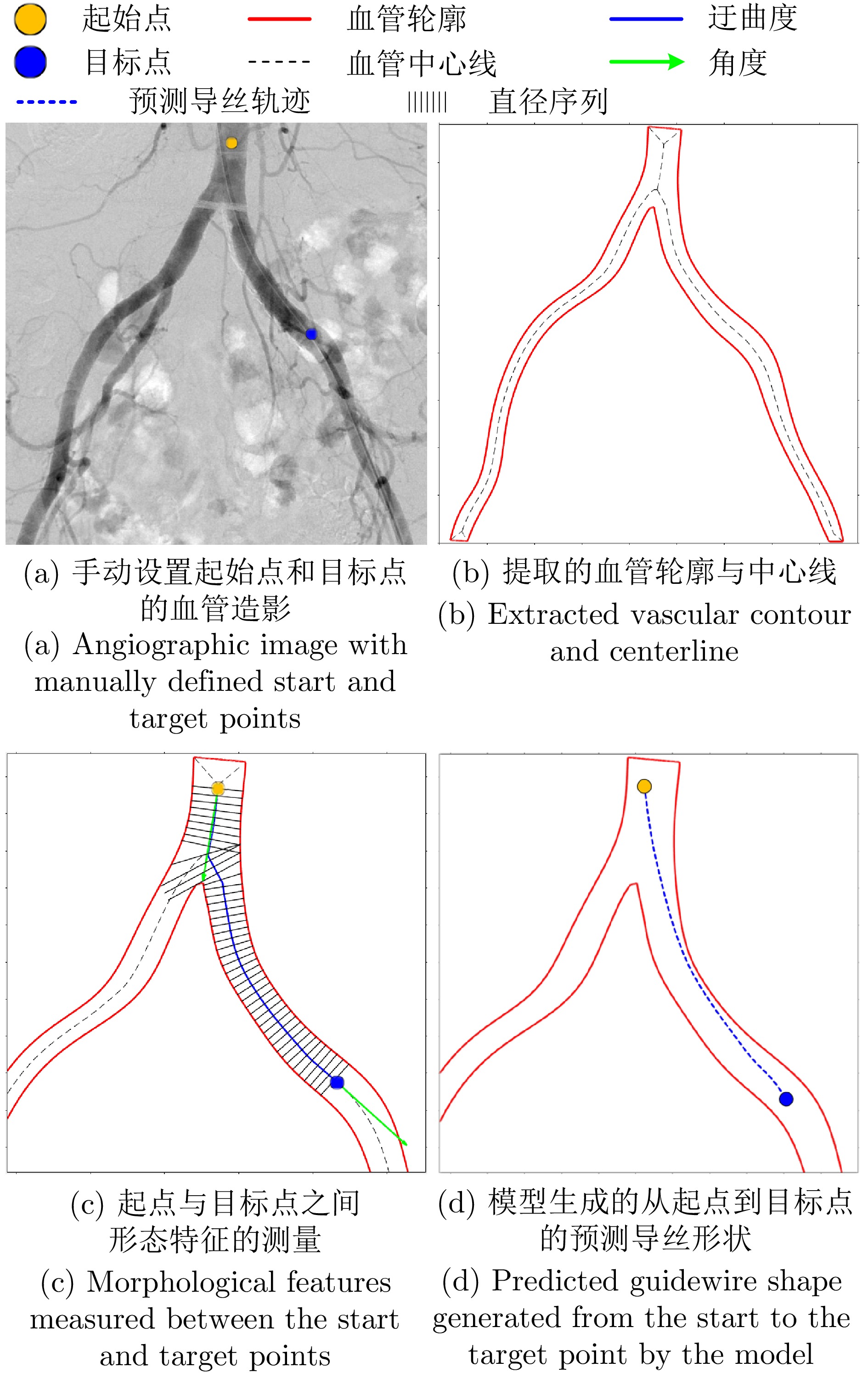
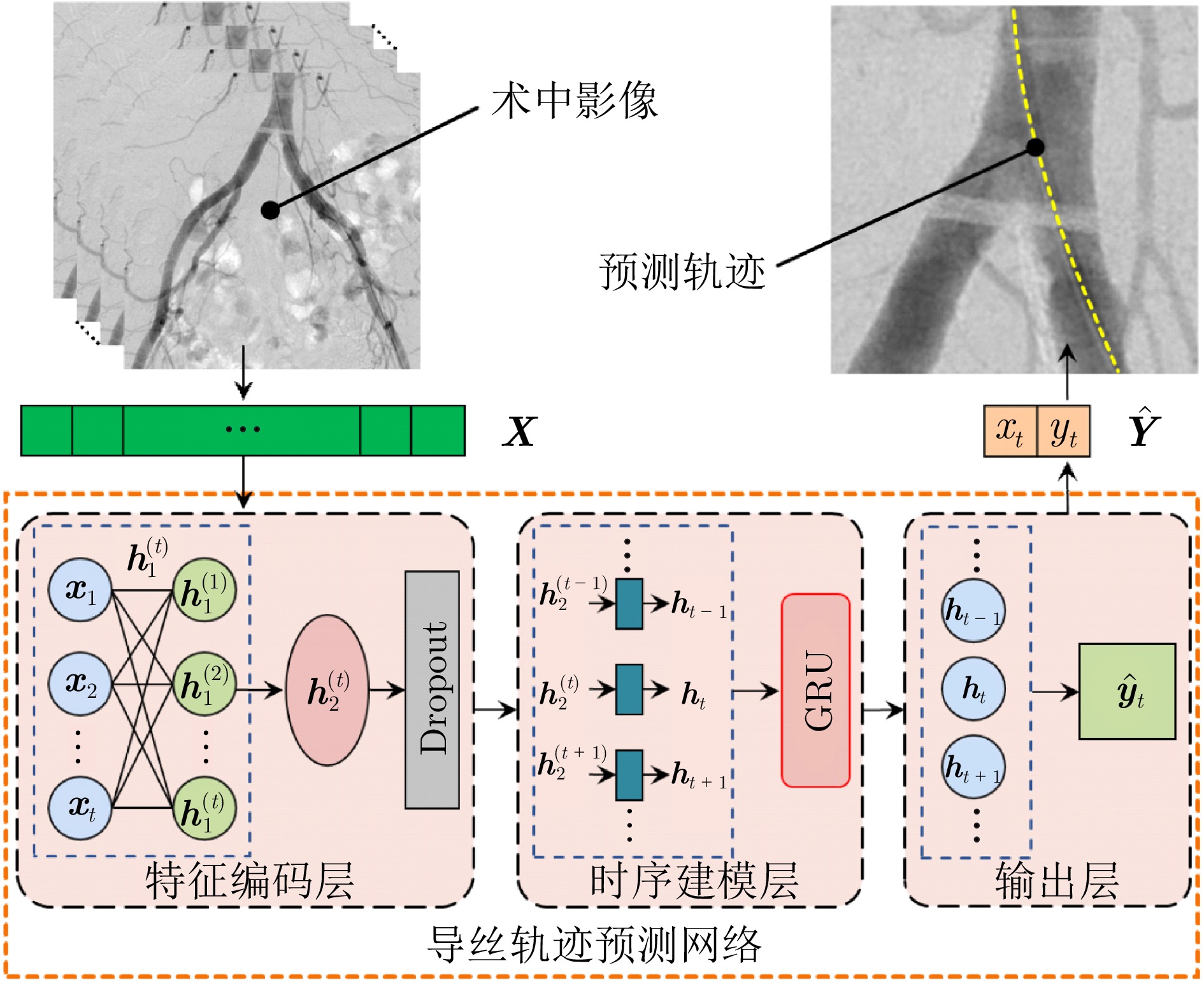
图 2 导丝形状预测流程示意图
Fig. 2 Schematic illustration of the guidewire shape prediction pipeline
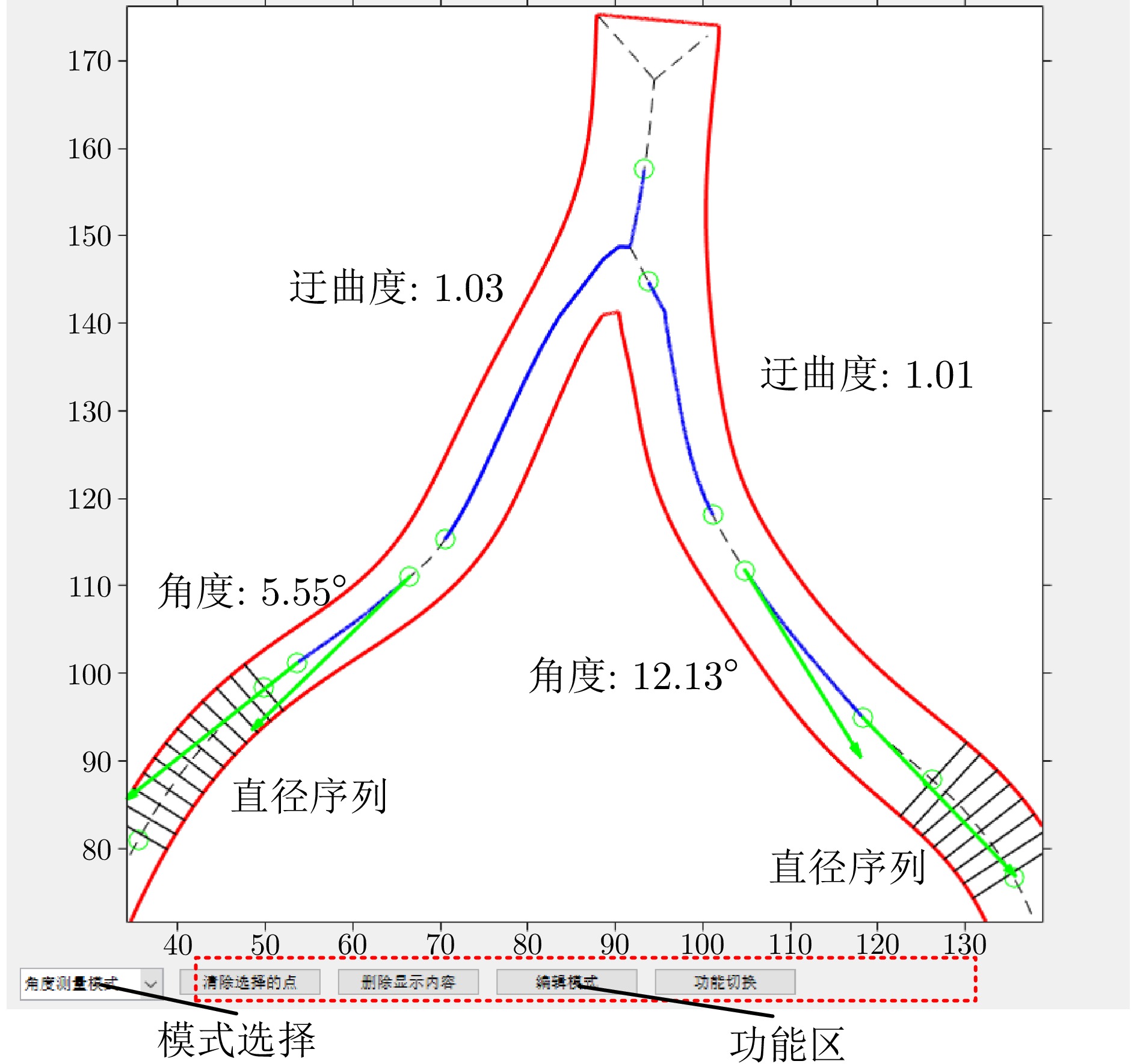
图 4 血管结构的形态特征测量结果示意图
Fig. 4 Illustration of morphological feature measurements results for vascular structures
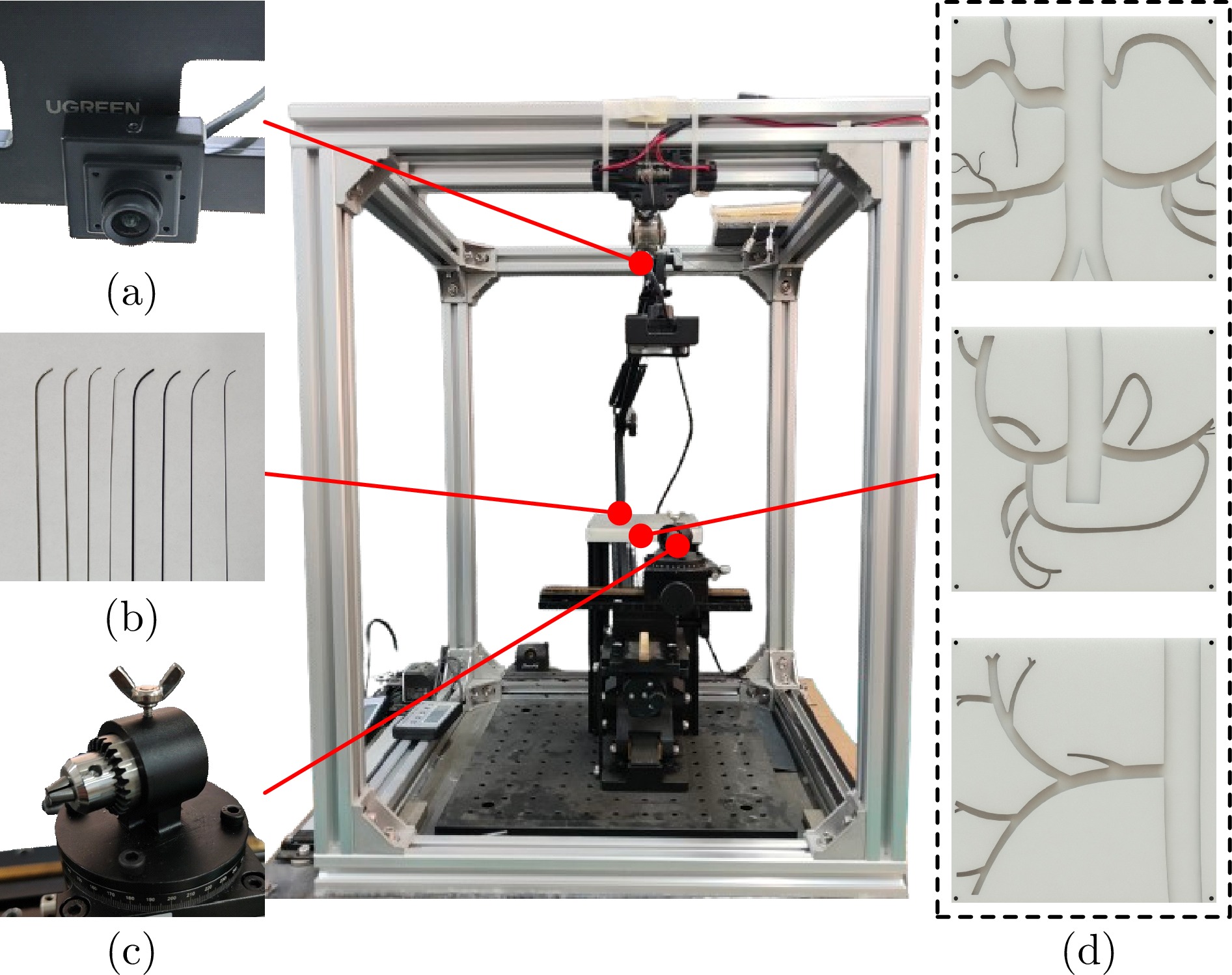
图 5 用户实验平台的组成结构示意图
Fig. 5 Schematic diagram of the user experiment platform and its components
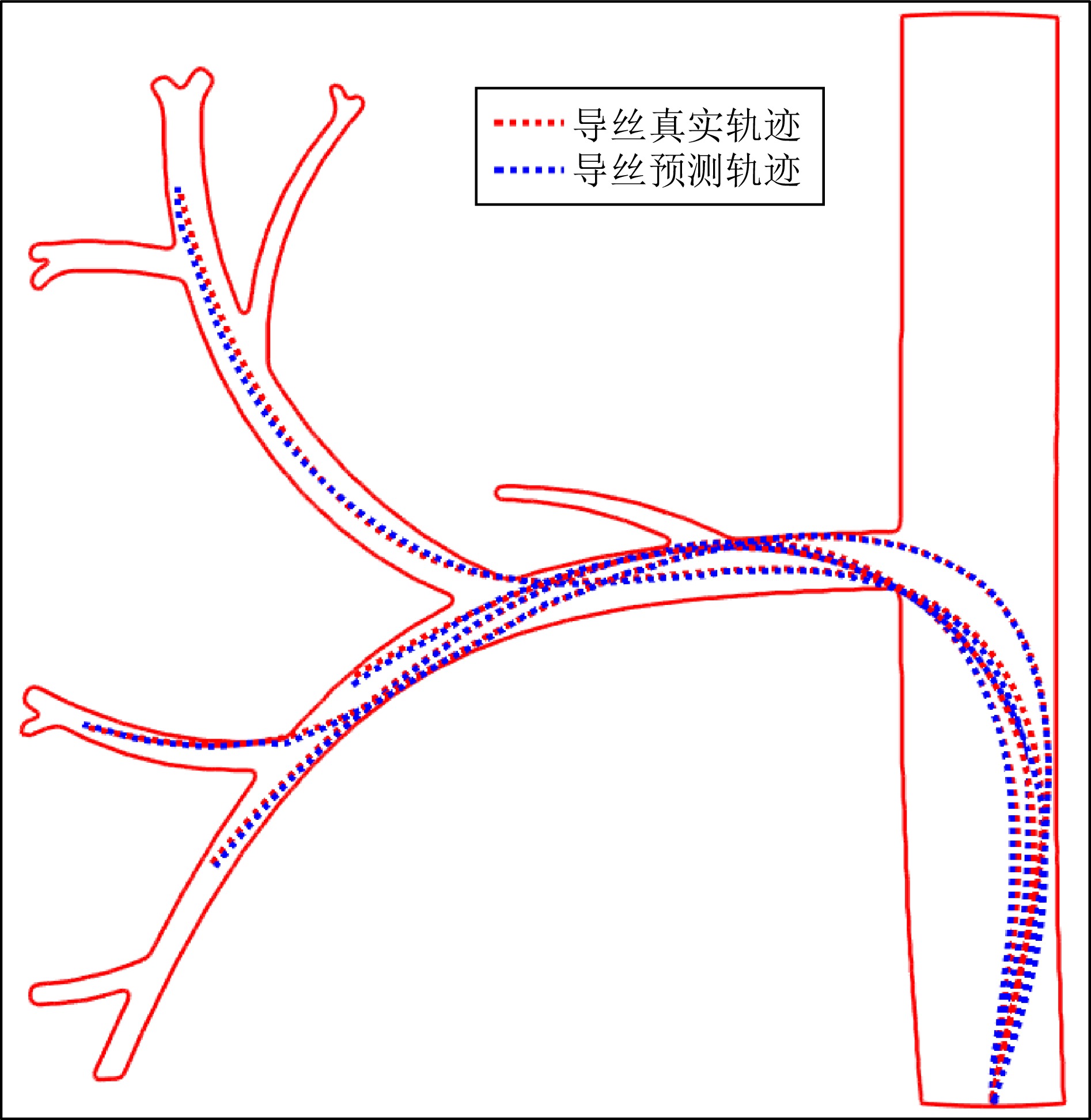
图 6 多目标任务中导丝轨迹真实与预测对比图
Fig. 6 Comparison of actual and predicted guidewire trajectories in multi-target tasks
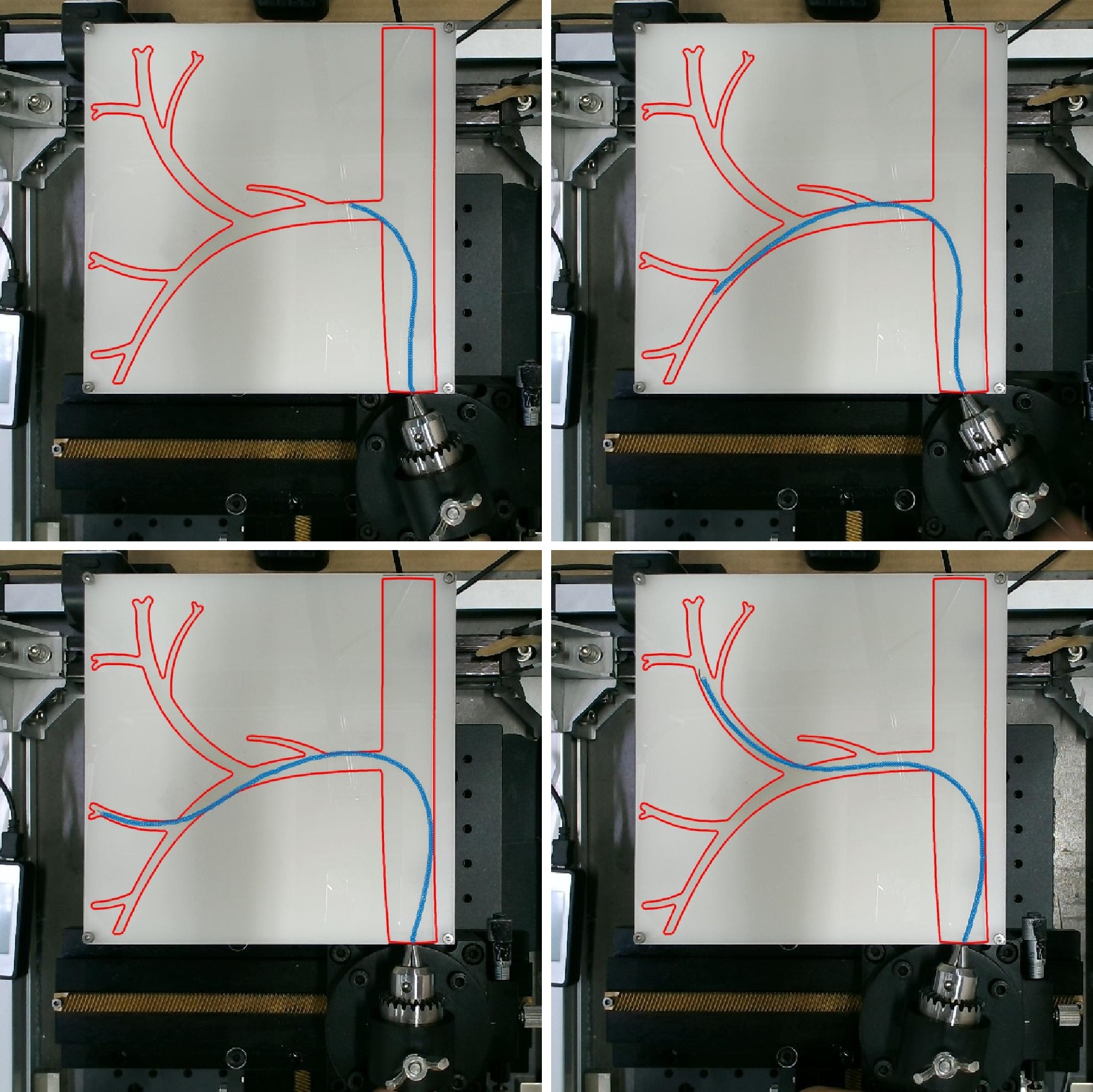
图 7 导丝插入任务中实拍图像上模型预测轨迹可视化
Fig. 7 Visualization of model-predicted trajectories overlaid on real captured images in guidewire insertion tasks
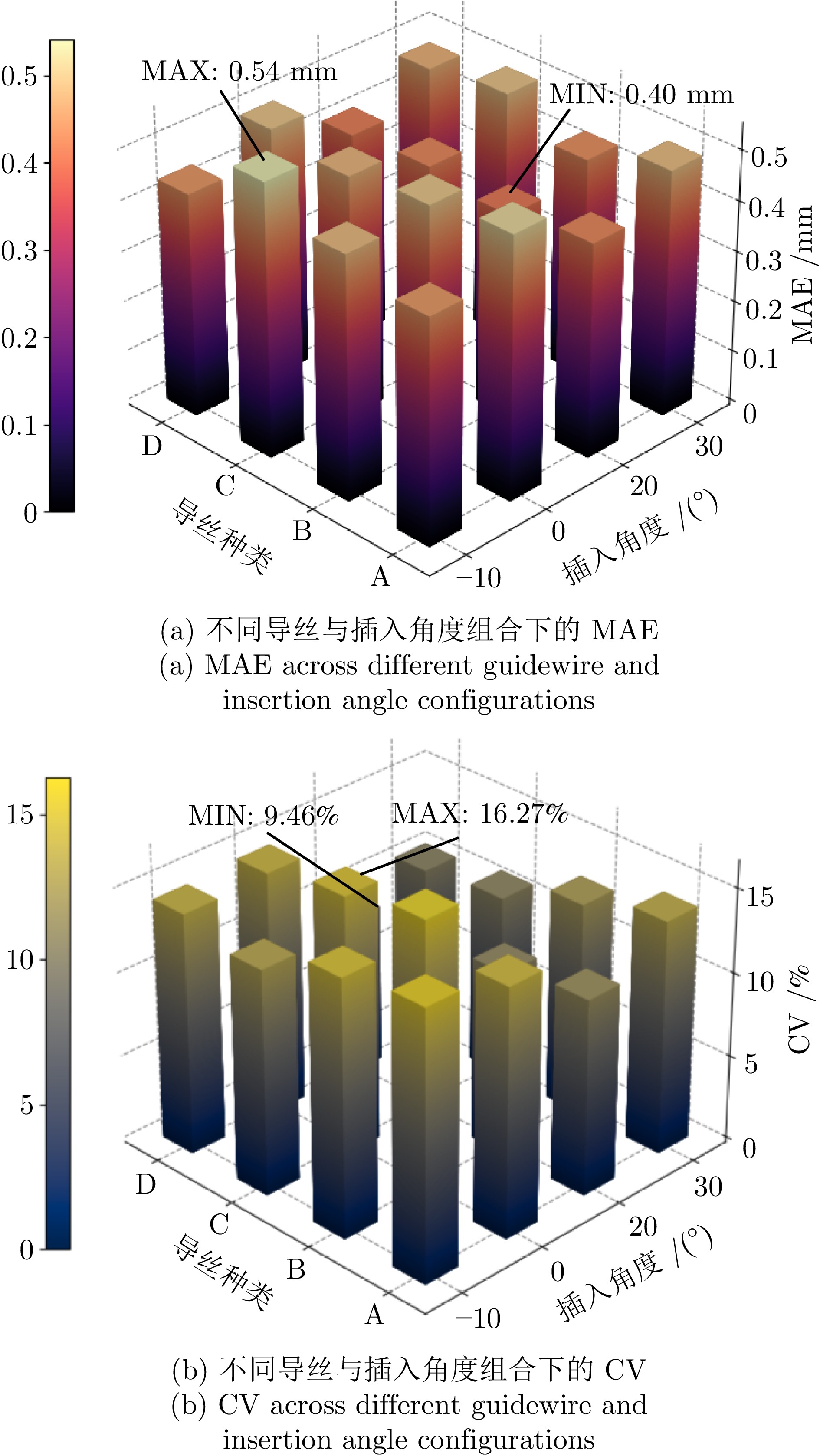
图 8 不同导丝与插入角度组合下的MAE和CV
Fig. 8 MAE and CV across different guidewire and insertion angle configurations
表 1 时间步分类策略对模型实时性的影响
Table 1 Impact of the time-step classification strategy on model real-time performance
是否使用时间步
分类策略epoch数量 训练用时
(h)单次推理时延
(ms)是 377 0.221 11.571 否 653 0.457 23.783  下载: 导出CSV
下载: 导出CSV
-
[1] Robertshaw H, Karstensen L, Jackson B, Granados A, Booth T C. Autonomous navigation of catheters and guidewires in mechanical thrombectomy using inverse reinforcement learning. International Journal of Computer Assisted Radiology and Surgery, 2024, 19(8): 1569−1578 doi: 10.1007/s11548-024-03208-w [2] 奉振球, 侯增广, 边桂彬, 谢晓亮, 周小虎. 微创血管介入手术机器人的主从交互控制方法与实现. 自动化学报, 2016, 42(5): 696−705 doi: 10.16383/j.aas.2016.c150577Feng Zhen-Qiu, Hou Zeng-Guang, Bian Gui-Bin, Xie Xiao-Liang, Zhou Xiao-Hu. Master-slave interactive control and implementation for minimally invasive vascular interventional robots. Acta Automatica Sinica, 2016, 42(5): 696−705 doi: 10.16383/j.aas.2016.c150577 [3] Li L, Li X J, Yang S L, Ding S, Jolfaei A, Zheng X. Unsupervised-learning-based continuous depth and motion estimation with monocular endoscopy for virtual reality minimally invasive surgery. IEEE Transactions on Industrial Informatics, 2021, 17(6): 3920−3928 doi: 10.1109/TII.2020.3011067 [4] Chen T, Zhao X W, Zhang Y H, Zheng G, Hou L C, Ling Q, et al. Ultrasound-guided robotic autonomous operation based on real-time deformation tracking and prediction. IEEE Transactions on Industrial Informatics, 2025, 21(2): 1369−1378 doi: 10.1109/TII.2024.3477549 [5] 张天, 刘检华, 唐承统, 刘少丽. 基于中心线匹配的导管三维重建技术. 自动化学报, 2015, 41(4): 735−748 doi: 10.16383/j.aas.2015.c130287Zhang Tian, Liu Jian-Hua, Tang Cheng-Tong, Liu Shao-Li. 3D reconstruction technique of pipe based on centerline matching. Acta Automatica Sinica, 2015, 41(4): 735−748 doi: 10.16383/j.aas.2015.c130287 [6] 金朝勇, 耿国华, 李姬俊男, 周明全, 朱新懿. 一种新的虚拟血管镜自动导航路径生成方法. 自动化学报, 2015, 41(8): 1412−1418 doi: 10.16383/j.aas.2015.c150014Jin Chao-Yong, Geng Guo-Hua, Li Ji-Jun-Nan, Zhou Ming-Quan, Zhu Xin-Yi. A new automatic navigation path generation approach to virtual angioscopy. Acta Automatica Sinica, 2015, 41(8): 1412−1418 doi: 10.16383/j.aas.2015.c150014 [7] 张名洋, 边桂彬, 李桢, 叶强. 支气管介入的多段柔性连续体机器人实时形状重建. 科学技术与工程, 2025, 25(1): 245−251Zhang Ming-Yang, Bian Gui-Bin, Li Zhen, Ye Qiang. Real-time shape reconstruction of flexible multi-segment continuum robot based for bronchial intervention. Science Technology and Engineering, 2025, 25(1): 245−251 [8] Pore A, Li Z, Dall'Alba D, Hernansanz A, de Momi E, Menciassi A, et al. Autonomous navigation for robot-assisted intraluminal and endovascular procedures: A systematic review. IEEE Transactions on Robotics, 2023, 39(4): 2529−2548 doi: 10.1109/TRO.2023.3269384 [9] Li P, Feng J, Zhang X, Fang D L, Zhang J X, Liang C M. Modeling and experimental study of the intervention forces between the guidewire and blood vessels. Medical Engineering & Physics, 2024, 127: Article No. 104166 doi: 10.1016/j.medengphy.2024.104166 [10] Ravigopal S R, Brumfiel T A, Sarma A, Desai J P. Fluoroscopic image-based 3-D environment reconstruction and automated path planning for a robotically steerable guidewire. IEEE Robotics and Automation Letters, 2022, 7(4): 11918−11925 doi: 10.1109/LRA.2022.3207568 [11] Zhang R F, Dong L J, Wang X S, Tian M Q, Su H B. A sensor-less guider contact force estimation approach for endovascular slender robot-assisted guidance system. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 1−9 doi: 10.1109/tim.2025.3545167 [12] Zhang R F, Dong L J, Wang X S, Tian M Q, Su H B. Morphological feature measurement of specific locations using image processing. In: Proceedings of the 8th International Conference on Machine Vision and Applications (ICMVA 2025). Melbourne, Australia: SPIE, 2025, 13734: 9−17 [13] Shen D H, Zhang Q, Han Y L, Tu C L, Wang X S. Design and development of a continuum robot with switching-stiffness. Soft Robotics, 2023, 10(5): 1015−1027 doi: 10.1089/soro.2022.0179 [14] Sharei H, Alderliesten T, van den Dobbelsteen J J, Dankelman J. Navigation of guidewires and catheters in the body during intervention procedures: A review of computer-based models. Journal of Medical Imaging, 2018, 5(1): Article No. 010902 doi: 10.1117/1.jmi.5.1.010902 [15] Beasley R A, Howe R D. Increasing accuracy in image-guided robotic surgery through tip tracking and model-based flexion correction. IEEE Transactions on Robotics, 2009, 25(2): 292−302 doi: 10.1109/TRO.2009.2014498 [16] 蒋芸, 谭宁. 基于条件深度卷积生成对抗网络的视网膜血管分割. 自动化学报, 2021, 47(1): 136−147Jiang Yun, Tan Ning. Retinal vessel segmentation based on conditional deep convolutional generative adver-sarial networks. Acta Automatica Sinica, 2021, 47(1): 136−147 [17] Tai Y H, Qian K, Huang X Q, Zhang J, Jan M A, Yu Z T. Intelligent intraoperative haptic-AR navigation for COVID-19 lung biopsy using deep hybrid model. IEEE Transactions on Industrial Informatics, 2021, 17(9): 6519−6527 doi: 10.1109/TII.2021.3052788 [18] Zhao Y, Wang Y X, Zhang J H, Liu X K, Li Y X, Guo S X, et al. Surgical GAN: Towards real-time path planning for passive flexible tools in endovascular surgeries. Neurocomputing, 2022, 500: 567−580 doi: 10.1016/j.neucom.2022.05.044 [19] Qi F, Ju F, Bai D M, Wang Y Y, Chen B. Kinematic analysis and navigation method of a cable-driven continuum robot used for minimally invasive surgery. The International Journal of Medical Robotics and Computer Assisted Surgery, 2019, 15(4): Article No. e2007 doi: 10.1002/rcs.2007 [20] Li Z, Dankelman J, de Momi E. Path planning for endovascular catheterization under curvature constraints via two-phase searching approach. International Journal of Computer Assisted Radiology and Surgery, 2021, 16(4): 619−627 doi: 10.1007/s11548-021-02328-x [21] Gao M K, Chen Y M, Liu Q, Huang C, Li Z Y, Zhang D H. Three-dimensional path planning and guidance of leg vascular based on improved ant colony algorithm in augmented reality. Journal of Medical Systems, 2015, 39(11): Article No. 133 doi: 10.1007/s10916-015-0315-2 [22] Scarponi V, Duprez M, Nageotte F, Cotin S. A zero-shot reinforcement learning strategy for autonomous guidewire navigation. International Journal of Computer Assisted Radiology and Surgery, 2024, 19(6): 1185−1192 doi: 10.1007/s11548-024-03092-4 [23] Kweon J, Kim K, Lee C, Kwon H, Park J, Song K, et al. Deep reinforcement learning for guidewire navigation in coronary artery phantom. IEEE Access, 2021, 9: 166409−166422 doi: 10.1109/ACCESS.2021.3135277 [24] Vy P, Auffret V, Castro M, Badel P, Rochette M, Haigron P, et al. Patient-specific simulation of guidewire deformation during transcatheter aortic valve implantation. International Journal for Numerical Methods in Biomedical Engineering, 2018, 34(6): Article No. e2974 doi: 10.1002/cnm.2974 [25] Cheng X R, Song Q K, Xie X L, Cheng L, Wang L, Bian G B, et al. A fast and stable guidewire model for minimally invasive vascular surgery based on Lagrange multipliers. In: Proceedings of the 7th International Conference on Information Science and Technology (ICIST). Da Nang, Vietnam: IEEE, 2017. 109−114 [26] Schafer S, Singh V, Noël P B, Walczak A M, Xu J, Hoffmann K R. Real-time endovascular guidewire position simulation using shortest path algorithms. International Journal of Computer Assisted Radiology and Surgery, 2009, 4(6): 597−608 doi: 10.1007/s11548-009-0385-z [27] Qiu J P, Zhang L B, Yang G Y, Chen Y, Zhou S J. An improved real-time endovascular guidewire position simulation using activity on edge network. IEEE Access, 2019, 7: 126618−126624 doi: 10.1109/ACCESS.2019.2935327 [28] Li N, Wang Y W, Zhao H, Ding H. Sensor-free strategy for estimating guidewire/catheter shape and contact force in endovascular interventions. IEEE Robotics and Automation Letters, 2025, 10(1): 264−271 doi: 10.1109/LRA.2024.3504236 [29] Chen K, Qin W J, Xie Y Q, Zhou S J. Towards real time guide wire shape extraction in fluoroscopic sequences: A two phase deep learning scheme to extract sparse curvilinear structures. Computerized Medical Imaging and Graphics, 2021, 94: Article No. 101989 doi: 10.1016/j.compmedimag.2021.101989 [30] Ha X T, Wu D, Ourak M, Borghesan G, Dankelman J, Menciassi A, et al. Shape sensing of flexible robots based on deep learning. IEEE Transactions on Robotics, 2023, 39(2): 1580−1593 doi: 10.1109/TRO.2022.3221368 [31] 黎定佳, 郭钰琪, 杨永明, 李锐, 刘连庆, 刘浩. 腔道介入交互约束下的柔性机器人具身形态感知方法. 机器人, 2025, 47(4): 497−507 doi: 10.13973/j.cnki.robot.250202Li Ding-Jia, Guo Yu-Qi, Yang Yong-Ming, Li Rui, Liu Lian-Qing, Liu Hao. Embodied morphological perception for flexible robots with interactive constraints in luminal intervention. Robot, 2025, 47(4): 497−507 doi: 10.13973/j.cnki.robot.250202 [32] Kuntz A, Sethi A, Webster R J, Alterovitz R. Learning the complete shape of concentric tube robots. IEEE Transactions on Medical Robotics and Bionics, 2020, 2(2): 140−147 doi: 10.1109/TMRB.2020.2974523 -

 下载:
下载:

计量
- 文章访问数: 456
- HTML全文浏览量: 265
- PDF下载量: 137
- 被引次数: 0
