

-
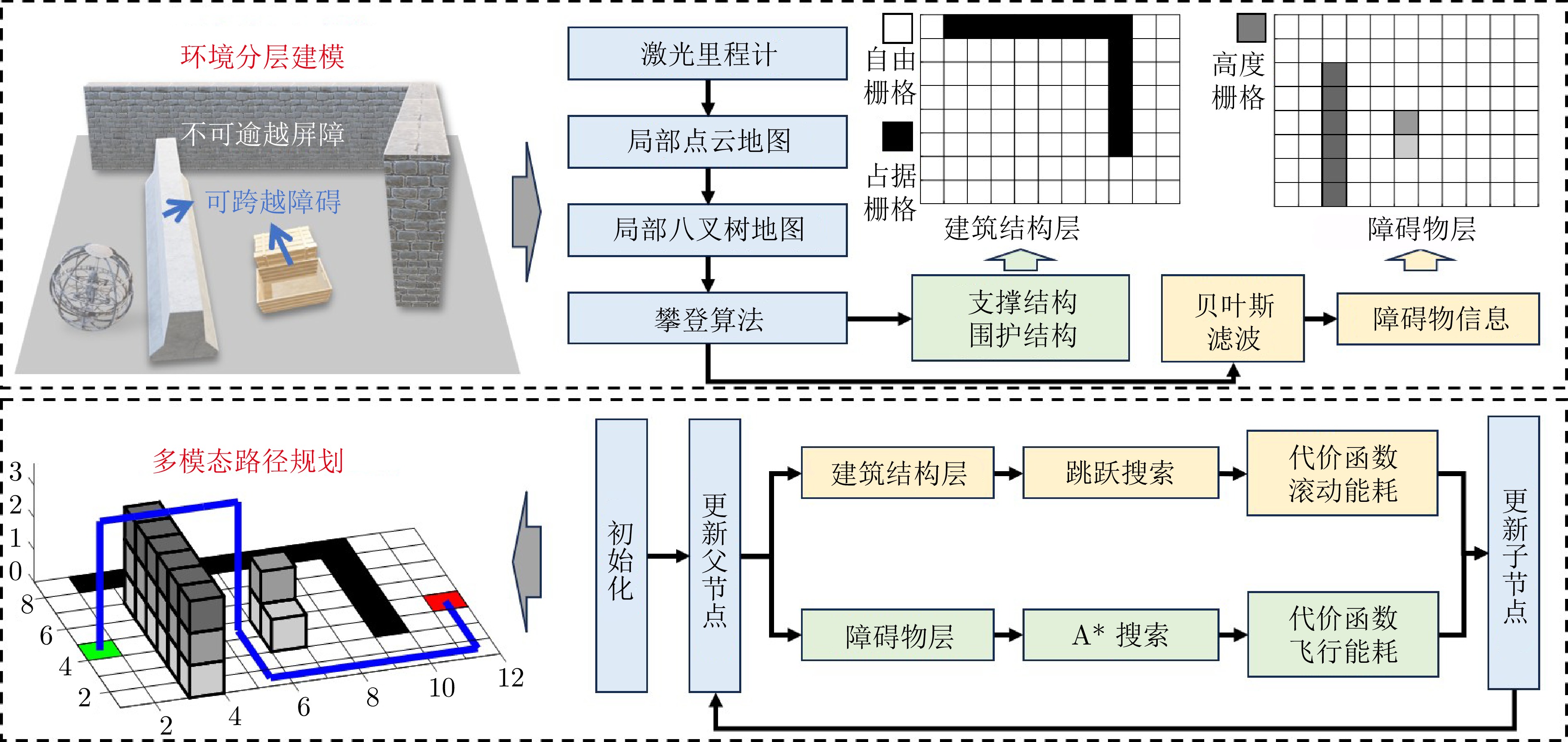
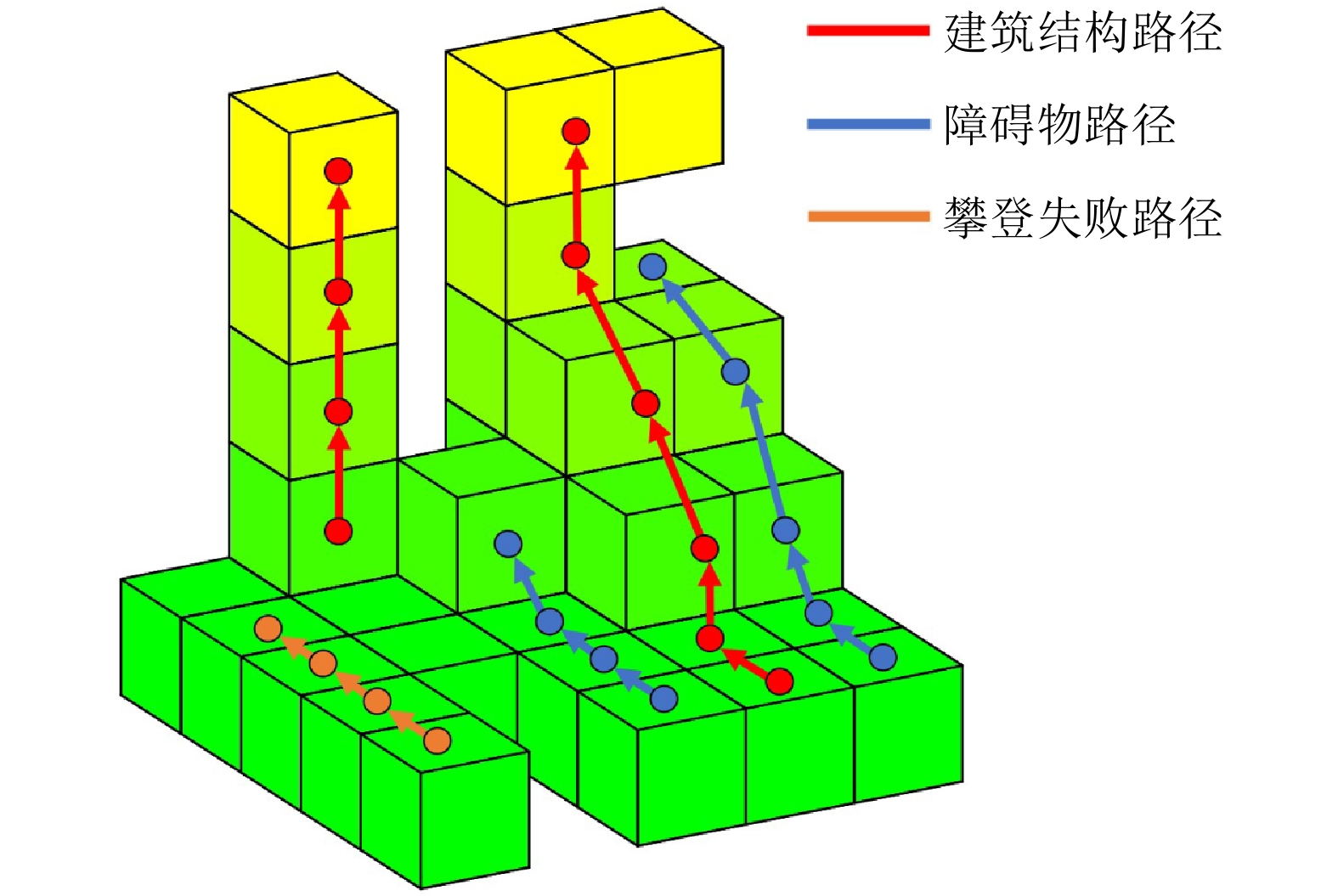
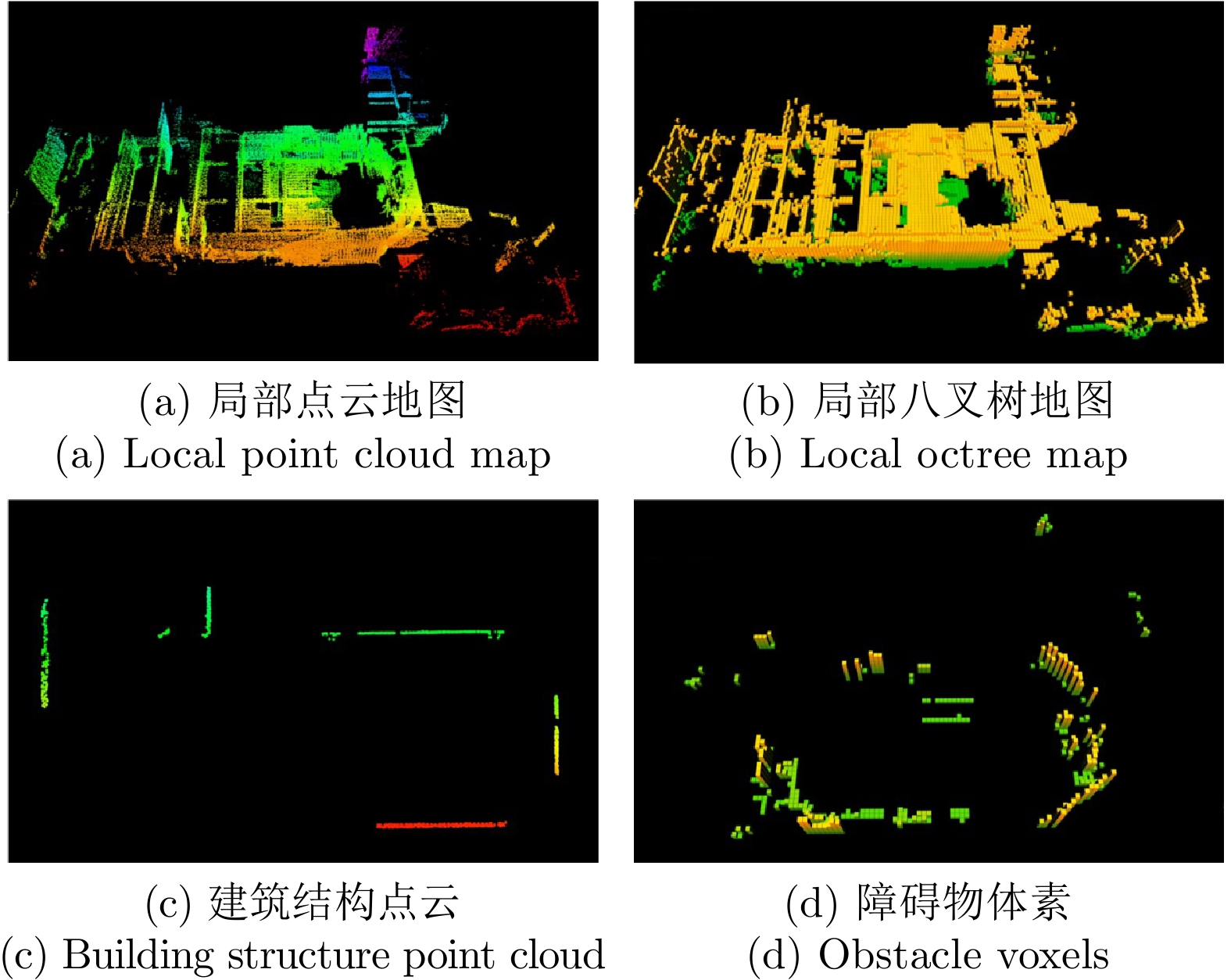
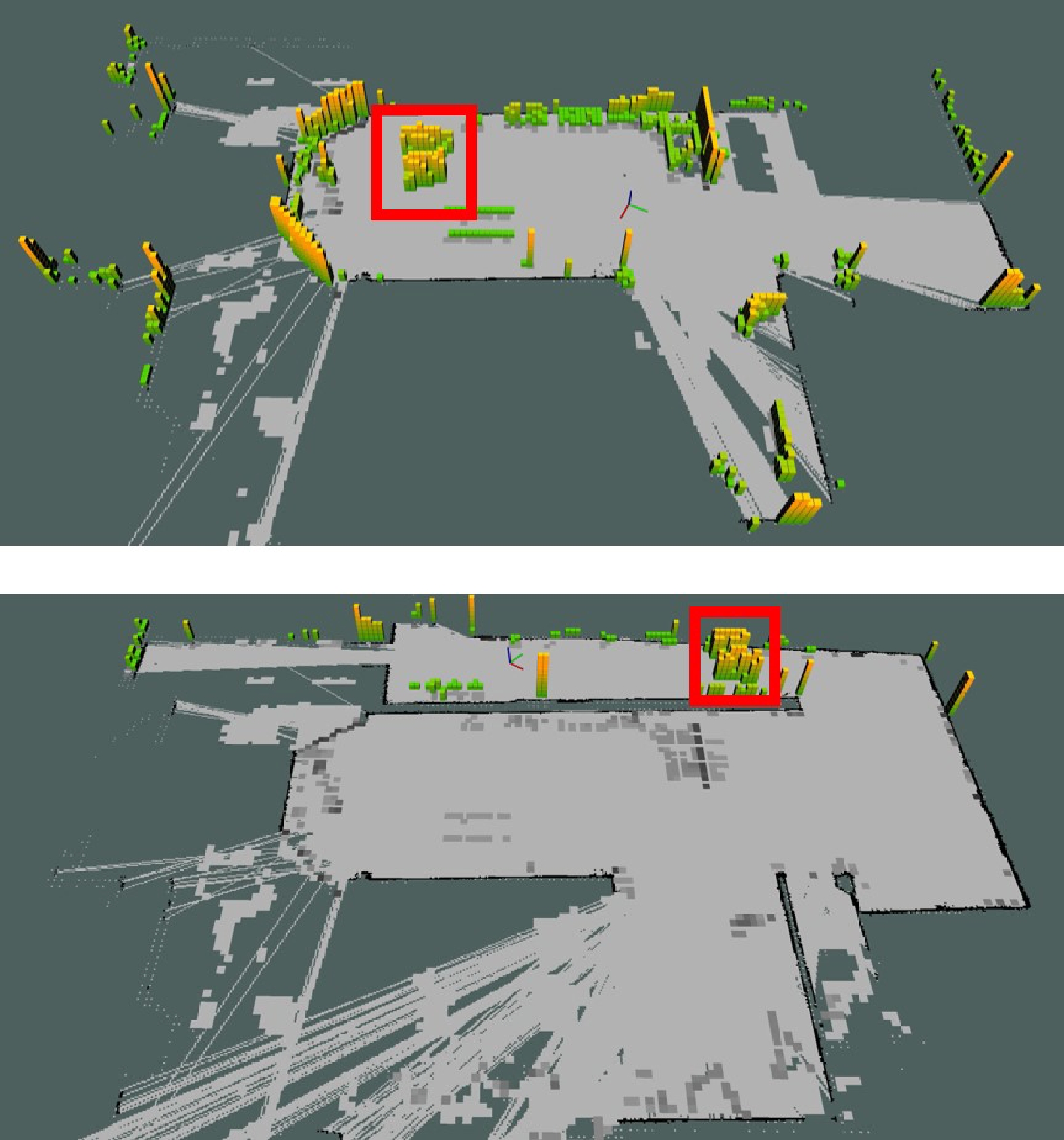
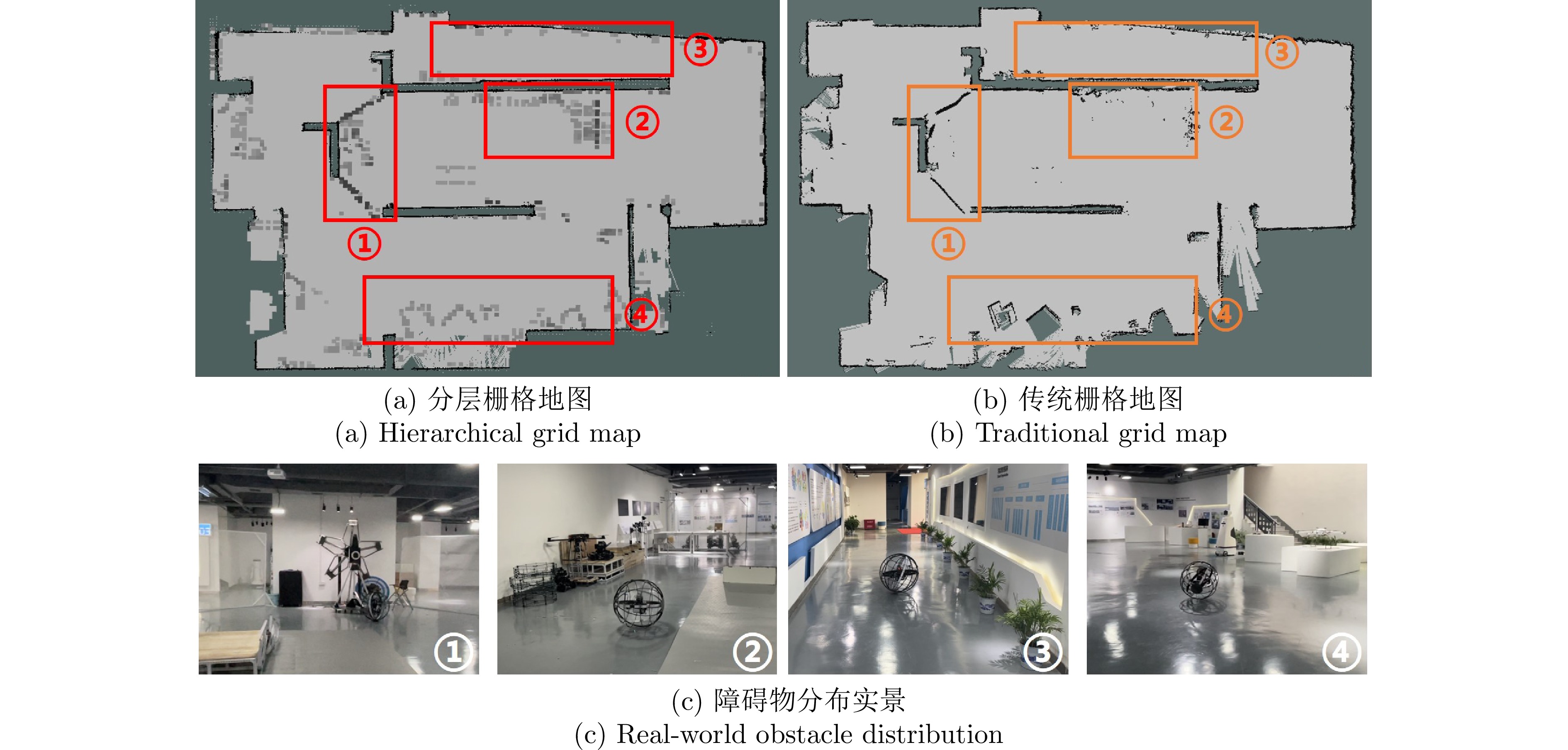
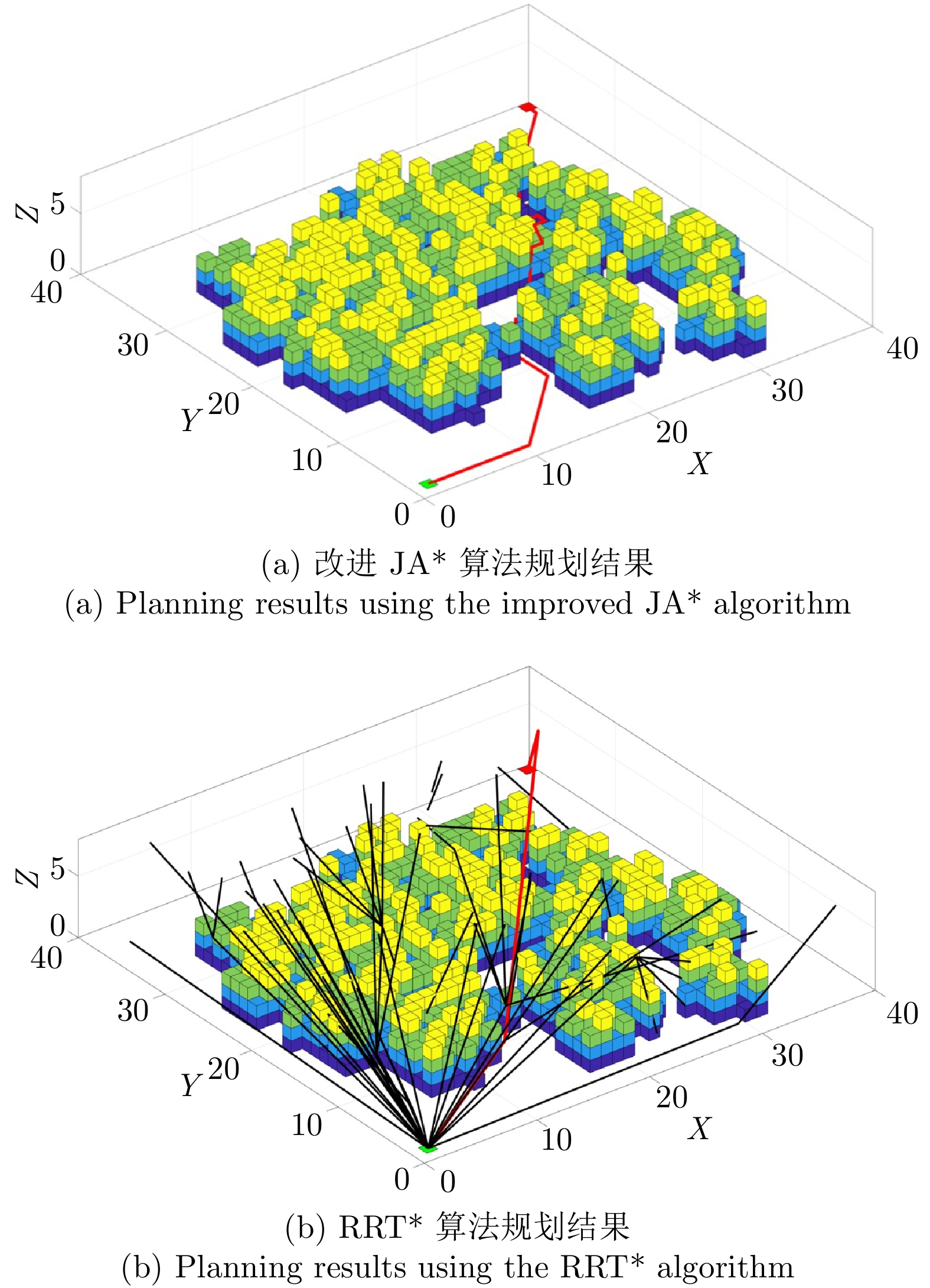
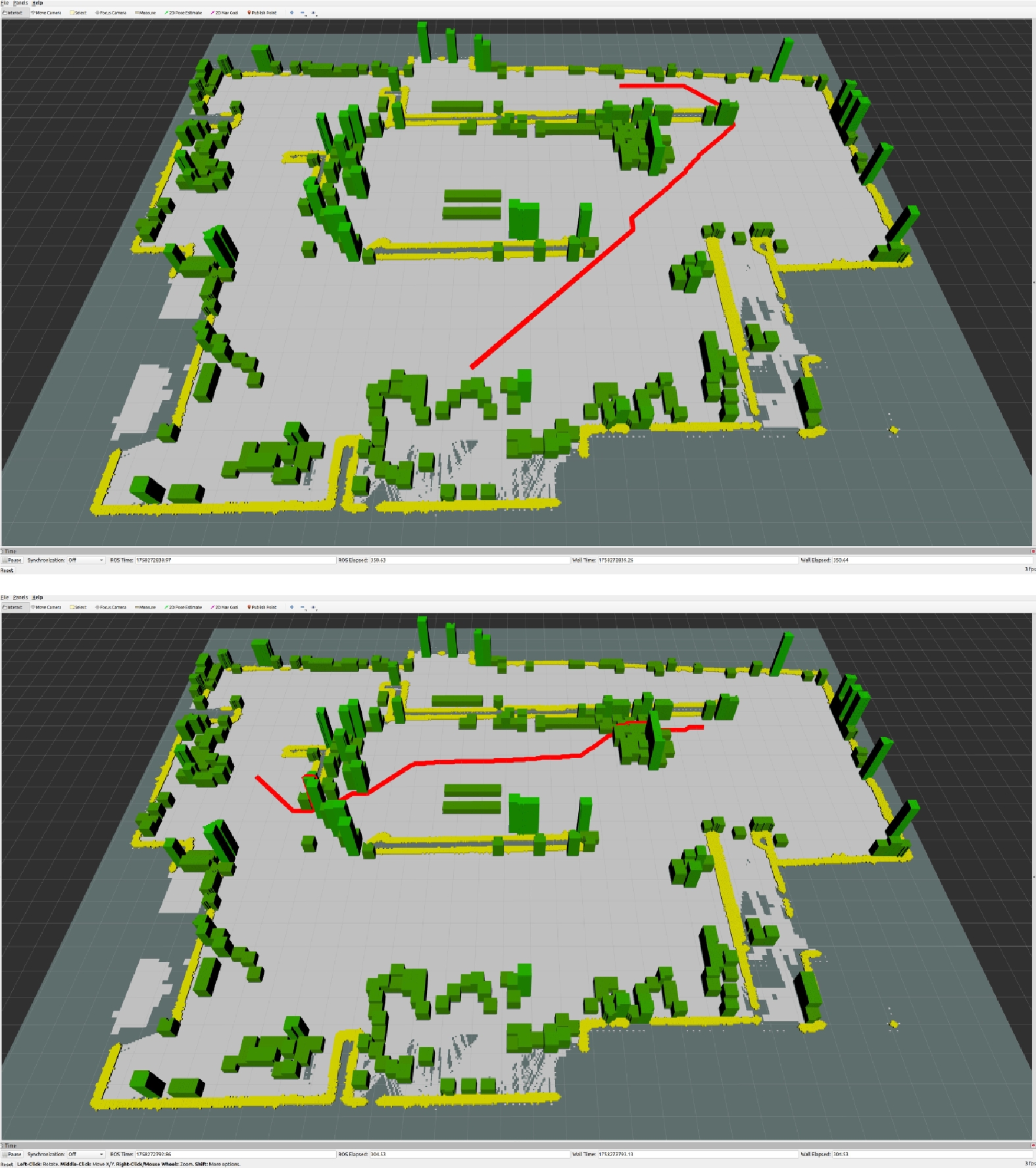
摘要: 飞滚多模态球形机器人(飞滚机器人, FRR)兼具空中飞行与地面滚动的多模态移动能力, 在搜索救援和巡检侦察等任务中展现出巨大潜力, 然而其在室内环境下的自主导航仍面临环境建模复杂和路径规划效率不足的挑战. 自然界生物普遍通过环境简化与能效权衡以实现高效的空间位移, 因此本文受到生物启发, 提出一种基于分层栅格地图的飞滚多模态路径规划方法. 首先, 构建由建筑结构层与障碍物层组成的分层栅格地图, 以实现对室内环境关键要素的高效表征. 其次, 设计改进的Jump A* 算法, 在建筑结构层采用跳点搜索规划地面滚动路径, 在障碍物层采用A* 搜索规划空中飞行路径, 并在代价函数中引入能量损耗项, 通过可调权重实现移动距离与能量消耗的平衡. 实验结果表明, 该方法能够有效构建室内环境的分层栅格地图, 并可在该地图上根据不同的距离和能耗目标进行多模态路径规划, 为FRR在复杂室内场景下的自主导航提供了可行方案.Abstract: The multimodal flying-rolling spherical robot (flying-rolling robot, FRR) combines aerial flight and ground rolling capabilities, showing strong potential in search and rescue, inspection and reconnaissance tasks. However, autonomous navigation in indoor environments remains challenging due to the complexity of environment modeling and insufficient path planning efficiency. Inspired by biological systems that achieve efficient locomotion through environment simplification and energy trade-offs, this paper proposes a multimodal path planning method for FRRs based on a hierarchical grid map. A hierarchical grid map composed of a building-structure layer and an obstacle layer is constructed to efficiently represent key elements of indoor environments. An improved Jump A* algorithm is then designed, where jump point search is used to plan ground rolling paths on the building-structure layer, while A* search is applied to plan aerial flight paths on the obstacle layer. An energy consumption term is introduced into the cost function, enabling a trade-off between path length and energy expenditure via tunable weights. Experimental results demonstrate that the proposed method can effectively construct a hierarchical grid map for indoor environments, and enables multimodal path planning on this map according to different distance and energy consumption objectives, providing a feasible solution for the autonomous navigation of FRR in complex indoor scenarios.
-
Key words:
- flying-rolling robot /
- hierarchical grid map /
- multimodal path planning /
- jump point search /
- A* search
-
表 1 改进JA* 算法参数
Table 1 Parameters of the improved JA* algorithm
参数 值 $m$ 6 kg $g$ 9.81$\mathrm{m/s^2}$ $P_{\text{hover}}$ 800 W $v$ 1 m/s $\alpha$ 1.0 $\beta$ 1.0  下载: 导出CSV
下载: 导出CSV
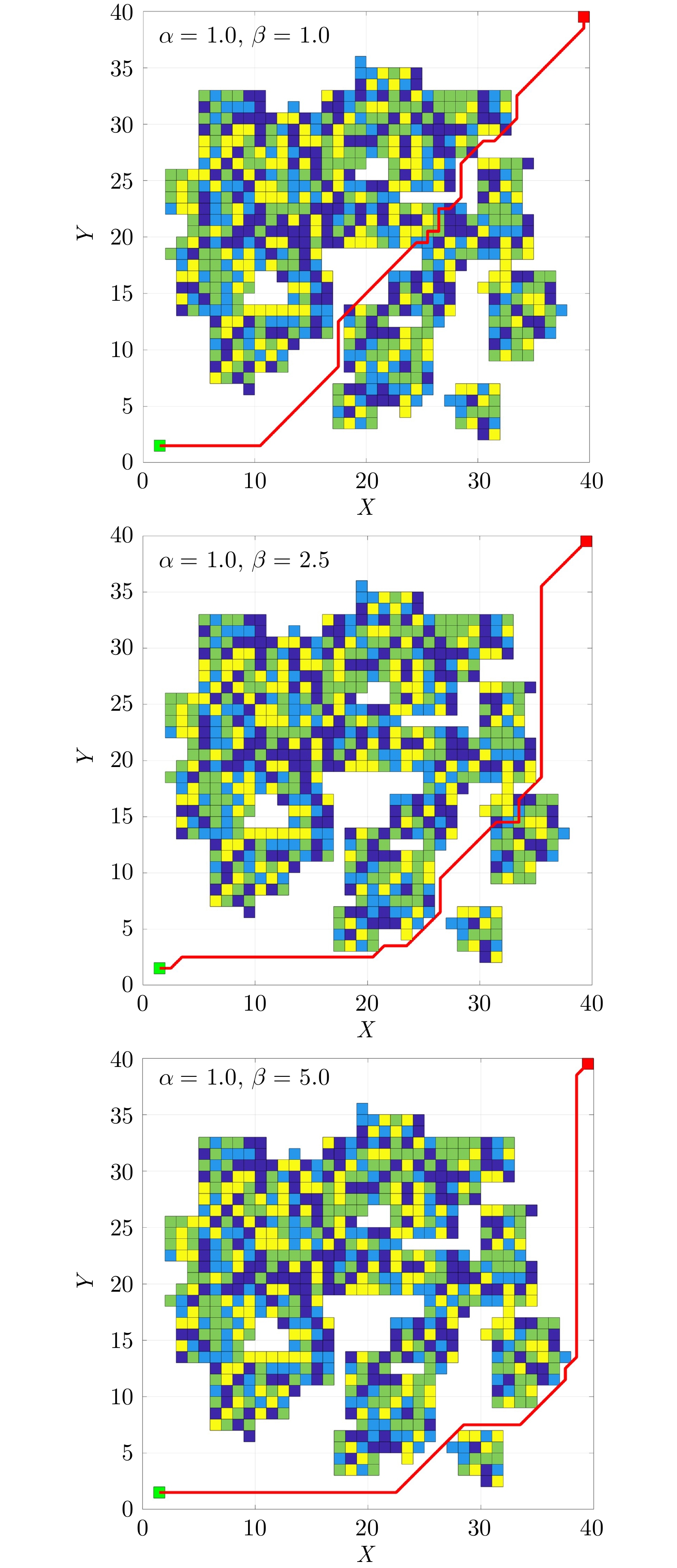
表 2 路径规划实验结果
Table 2 Path planning experimental results
序号 $\alpha$ $\beta$ 飞/滚距离(m) 飞滚切换次数 能量消耗(J) 1 1.0 1.0 21.8/44.0 8 35069 2 1.0 2.5 9.1/59.8 2 31216 3 1.0 5.0 0.0/68.9 0 27588
下载: 导出CSV
-
[1] Zhou X D, Zhong H, Zhang H, He W, Hua H A, Wang Y N. Current status, challenges, and prospects for new types of aerial robots. Engineering, 2024, 41(10): 19−34 [2] Fankhauser P, Bloesch M, Hutter M. Probabilistic terrain mapping for mobile robots with uncertain localization. IEEE Robotics and Automation Letters, 2018, 3(4): 3019−3026 doi: 10.1109/LRA.2018.2849506 [3] Pütz S, Wiemann T, Piening M K, Hertzberg J. Continuous shortest path vector field navigation on 3D triangular meshes for mobile robots. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021. 2256−2263 [4] Gim H, Jeong M, Han S. Autonomous navigation system with obstacle avoidance using 2.5D map generated by point cloud. In: Proceedings of the 21st International Conference on Control, Automation and Systems (ICCAS). Jeju, Korea: IEEE, 2021. 749−752 [5] Chen S Y, Chen H, Chang C W, Wen C Y. Multilayer mapping kit for autonomous UAV navigation. IEEE Access, 2021, 9: 31493−31503 [6] Liu J Y, Chen X Y L, Xiao J H, Lin S C, Zheng Z Q, Lu H M. Hybrid map-based path planning for robot navigation in unstructured environments. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. 2216−2223 [7] Yang B W, Cheng J, Xue B H, Jiao J H, Liu M. Efficient global navigational planning in 3D structures based on point cloud tomography. IEEE/ASME Transactions on Mechatronics, 2025, 30(1): 321−332 doi: 10.1109/TMECH.2024.3396001 [8] Guo S, Hu Y Z, Xu M L, Liu J G, Ju Z J. A novel hybrid 2.5D map representation method enabling 3D reconstruction of semantic objects in expansive indoor environments. IEEE Transactions on Automation Science and Engineering, 2025, 22: 9636−9650 [9] 李少波, 宋启松, 李志昂, 张星星, 柘龙炫. 遗传算法在机器人路径规划中的研究综述. 科学技术与工程, 2020, 20(2): 423−431Li Shao-Bo, Song Qi-Song, Li Zhi-Ang, Zhang Xing-Xing, Zhe Long-Xuan. Review of genetic algorithm in robot path planning. Science Technology and Engineering, 2020, 20(2): 423−431 [10] 杨萍, 赵珍, 郑海霞. 基于改进蚁群算法的移动机器人全局路径规划方法研究. 机械制造与自动化, 2017, 46(6): 155−157Yang Ping, Zhao Zhen, Zheng Hai-Xia. Research on mobile robot global path planning based on improved ant colony algorithm. Machine Building and Automation, 2017, 46(6): 155−157 [11] 胡章芳, 冯淳一, 罗元. 改进粒子群优化算法的移动机器人路径规划. 计算机应用研究, 2021, 38(10): 3089−3092Hu Zhang-Fang, Feng Chun-Yi, Luo Yuan. Improved particle swarm optimization algorithm for mobile robot path planning. Application Research of Computers, 2021, 38(10): 3089−3092 [12] Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100−107 [13] Harabor D, Grastien A. The JPS pathfinding system. Proceedings of the International Symposium on Combinatorial Search, 2021, 3(1): 207−208 [14] Sharif A, Lahiru H M, Herath S, Roth H. Energy efficient path planning of hybrid fly-drive robot (HyFDR) using A* algorithm. In: Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics. Porto, Portugal: SciTePress, 2018. 201−210 [15] Wang X Y, Huang K Y, Zhang X Y, Sun H L, Liu W Z, Liu H P. Path planning for air-ground robot considering modal switching point optimization. In: Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS). Warsaw, Poland: IEEE, 2023. 87−94 [16] Mustafa M A, Yaqoot Y, Martynov M, Karaf S, Tsetserukou D. MorphoMove: Bi-modal path planner with MPC-based path follower for multi-limb morphogenetic UAV. In: Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC). Kuching, Malaysia: IEEE, 2024. 1820−1825 [17] Zhou X D, Zhong H, Zhang H, Chen M Y, Yu H Y, Wang W Z. A method for constructing building structure grid map based on a climbing algorithm. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Atlanta, USA: IEEE, 2025. 13753−13758 [18] Thrun S. Probabilistic robotics. Communications of the ACM, 2002, 45(3): 52−57 [19] 周熙栋, 张辉, 陈波. 非结构化场景下基于改进JPS算法的移动机器人路径规划. 控制与决策, 2024, 39(2): 474−482Zhou Xi-Dong, Zhang Hui, Chen Bo. Path planning of mobile robot based on improved JPS algorithm in unstructured scene. Control and Decision, 2024, 39(2): 474−482 [20] He D J, Xu W, Chen N, Kong F Z, Yuan C J, Zhang F. Point-LIO: Robust high-bandwidth light detection and ranging inertial odometry. Advanced Intelligent Systems, 2023, 5(7): Article No. 2200459 -

 下载:
下载:

图(9) / 表(2)
计量
- 文章访问数: 464
- HTML全文浏览量: 152
- PDF下载量: 172
- 被引次数: 0
