

Maritime Target Detection and Tracking Strategy Based on the Collaboration of Air-Sea-Submarine Cross-domain Unmanned Platform
-
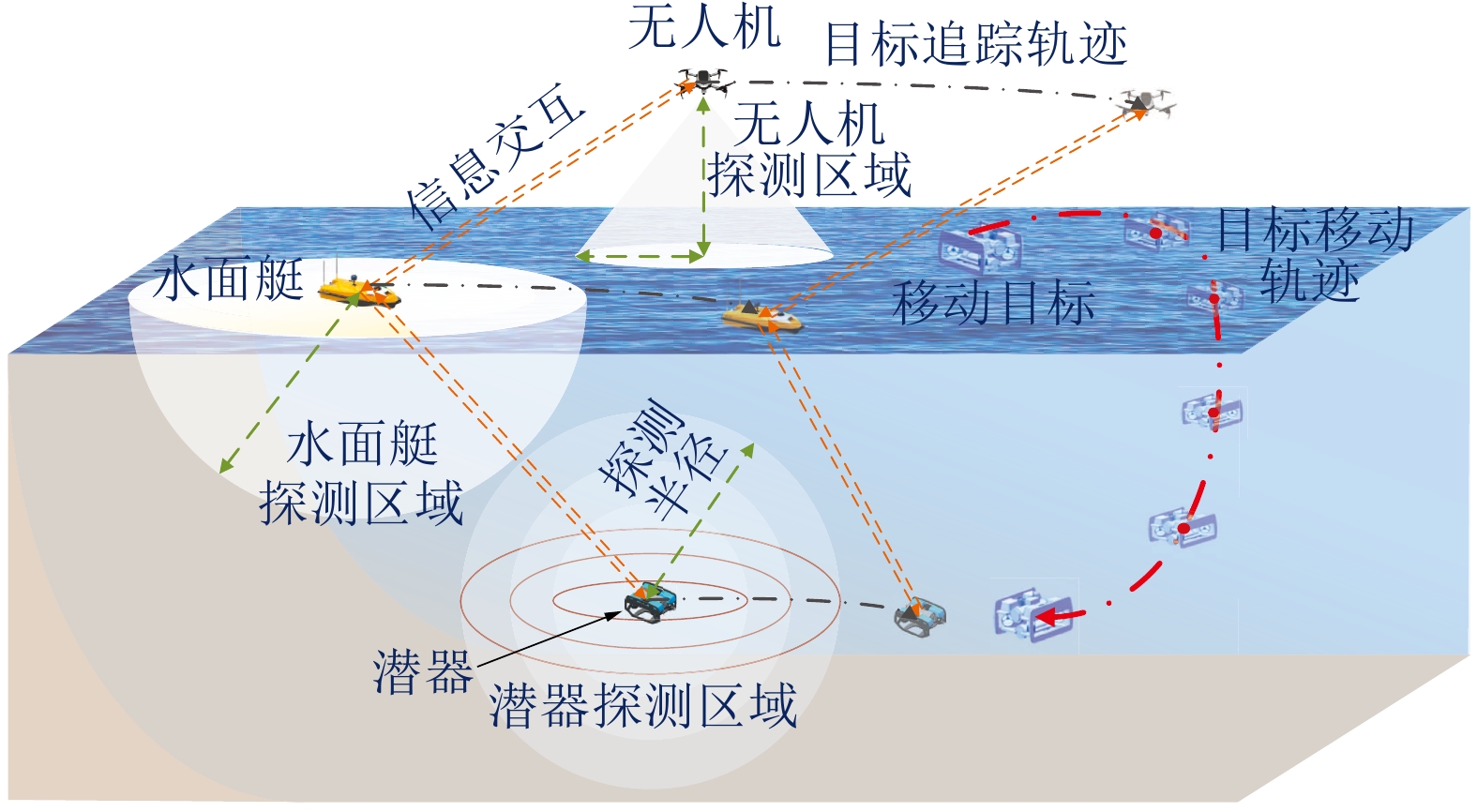
摘要: 提出一种基于空−海−潜跨域无人平台协同的海上目标探测追踪策略. 首先, 构建无人机−水面艇−潜器协同的海上跨域无人系统. 然后, 针对海上目标的高机动性以及无人平台自身约束, 采用测度理论解析无人机−水面艇−潜器最佳探测编队队形, 实现目标探测概率最大化; 当探测到目标后, 设计基于逆强化学习的无人机−水面艇−潜器编队控制器, 实现障碍物环境下水面/水下目标的可靠有效追踪. 最后, 通过仿真与实验验证了所提方法的有效性. 结果表明, 所提探测模式可以实现有限时间内移动目标探测概率最大化, 同时所提逆强化学习编队控制器可以在保持队形稳定的基础上, 结合动态避障策略, 实现复杂环境下跨域无人平台安全协同追踪.Abstract: This paper proposes a maritime target detection and tracking strategy based on the collaboration of air-sea-submarine cross-domain unmanned platform. Firstly, a maritime cross-domain unmanned system that integrates unmanned aerial vehicle (UAV), unmanned surface vessel (USV), and autonomous underwater vehicle (AUV) is constructed. Then, the optimal detection formation of UAV-USV-AUV is analyzed using measure theory to maximize target detection probability, accounting for the high maneuverability of maritime targets and the constraints of unmanned platform; After the target is detected, an inverse reinforcement learning-based controller is designed for the formation of UAV-USV-AUV to achieve reliable and effective tracking of surface/underwater targets in obstacle-prone environments. Finally, simulations and experiments are conducted to validate the effectiveness of the proposed method. The results show that the proposed detection mode can maximize the probability of detecting mobile targets within a finite time, and the proposed inverse reinforcement learning formation controller can achieve secure and collaborative tracking of cross-domain unmanned platform in complex environments by combining dynamic obstacle avoidance strategies while maintaining formation stability.
-
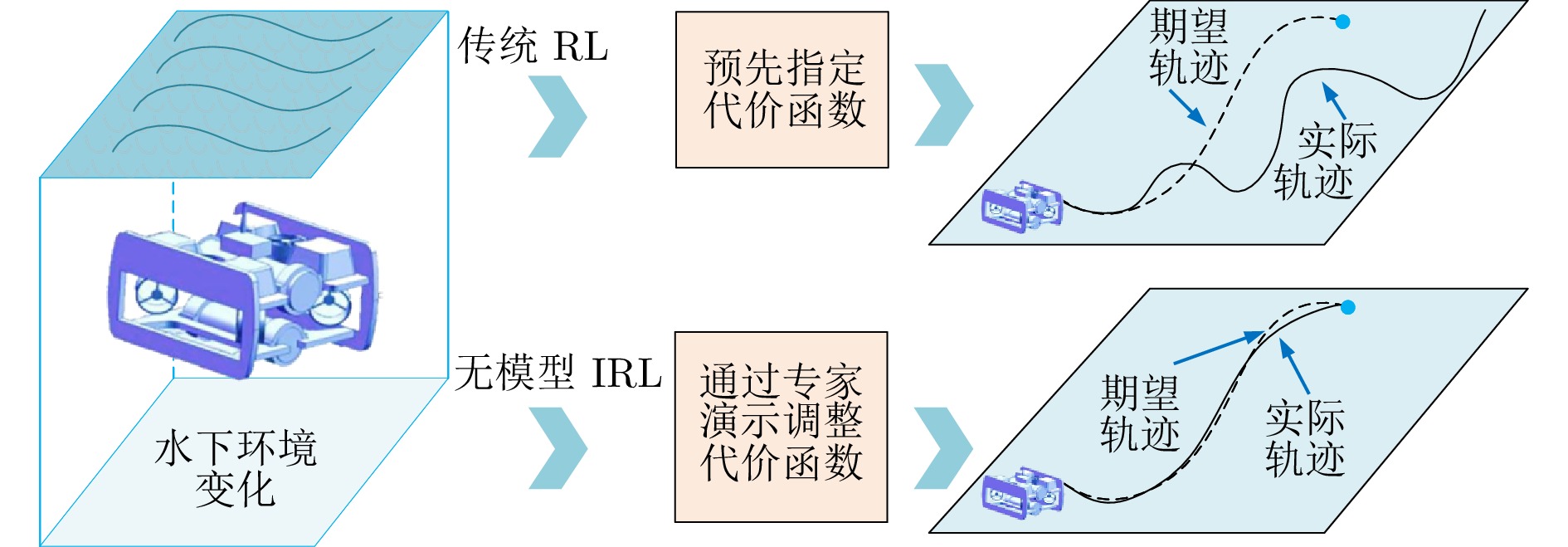
图 6 应对模型不确定性与环境变化的策略
Fig. 6 Strategy to handle model uncertainty and environment changes
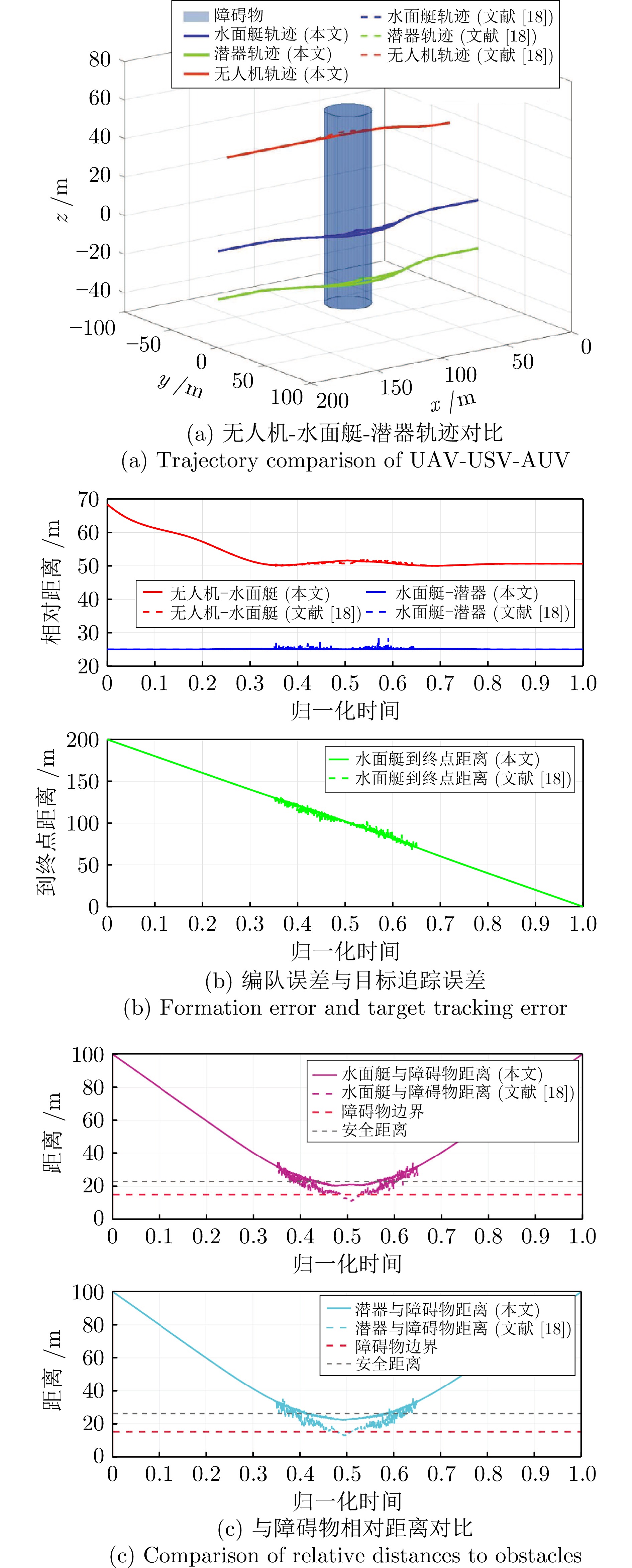
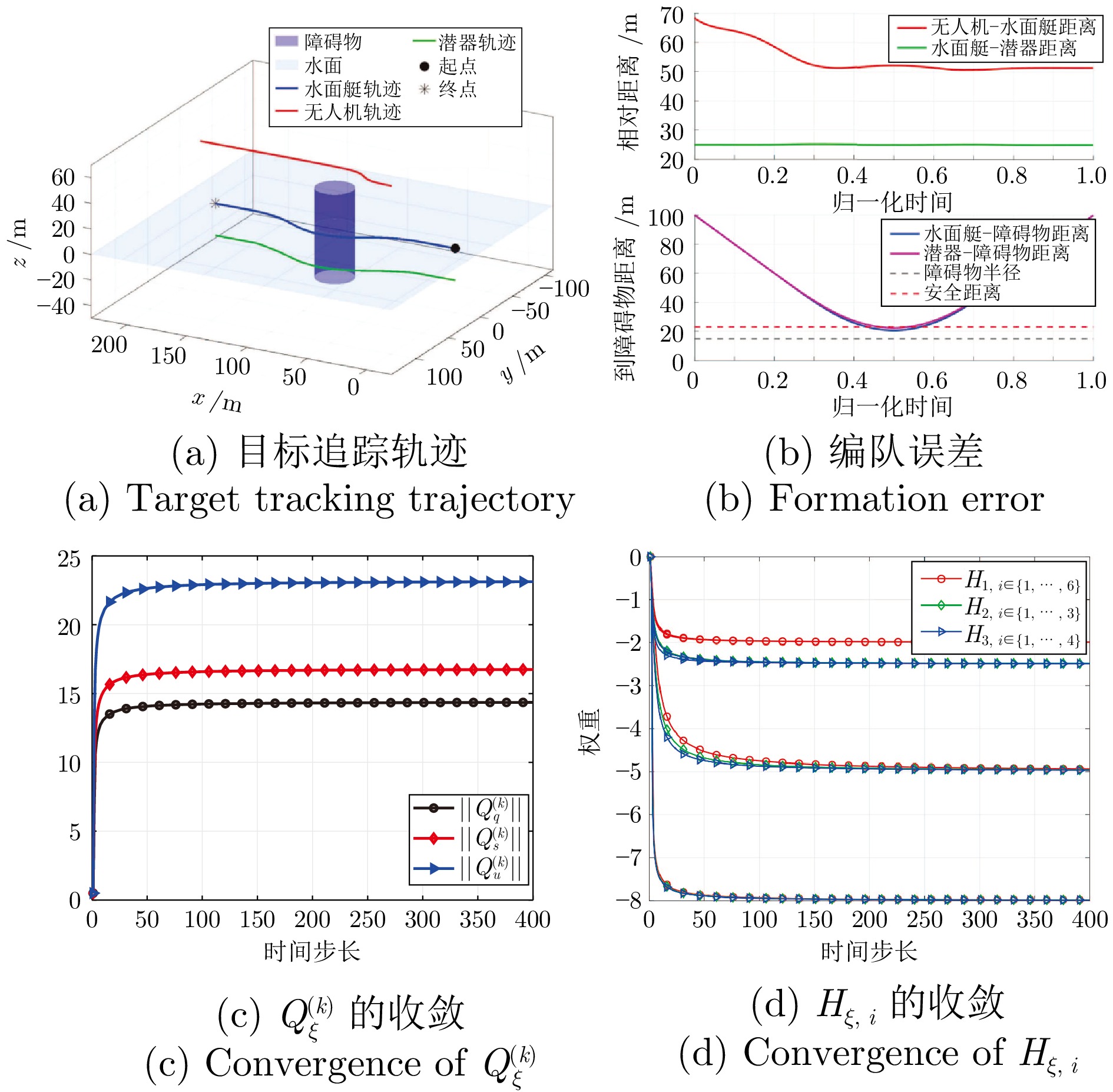
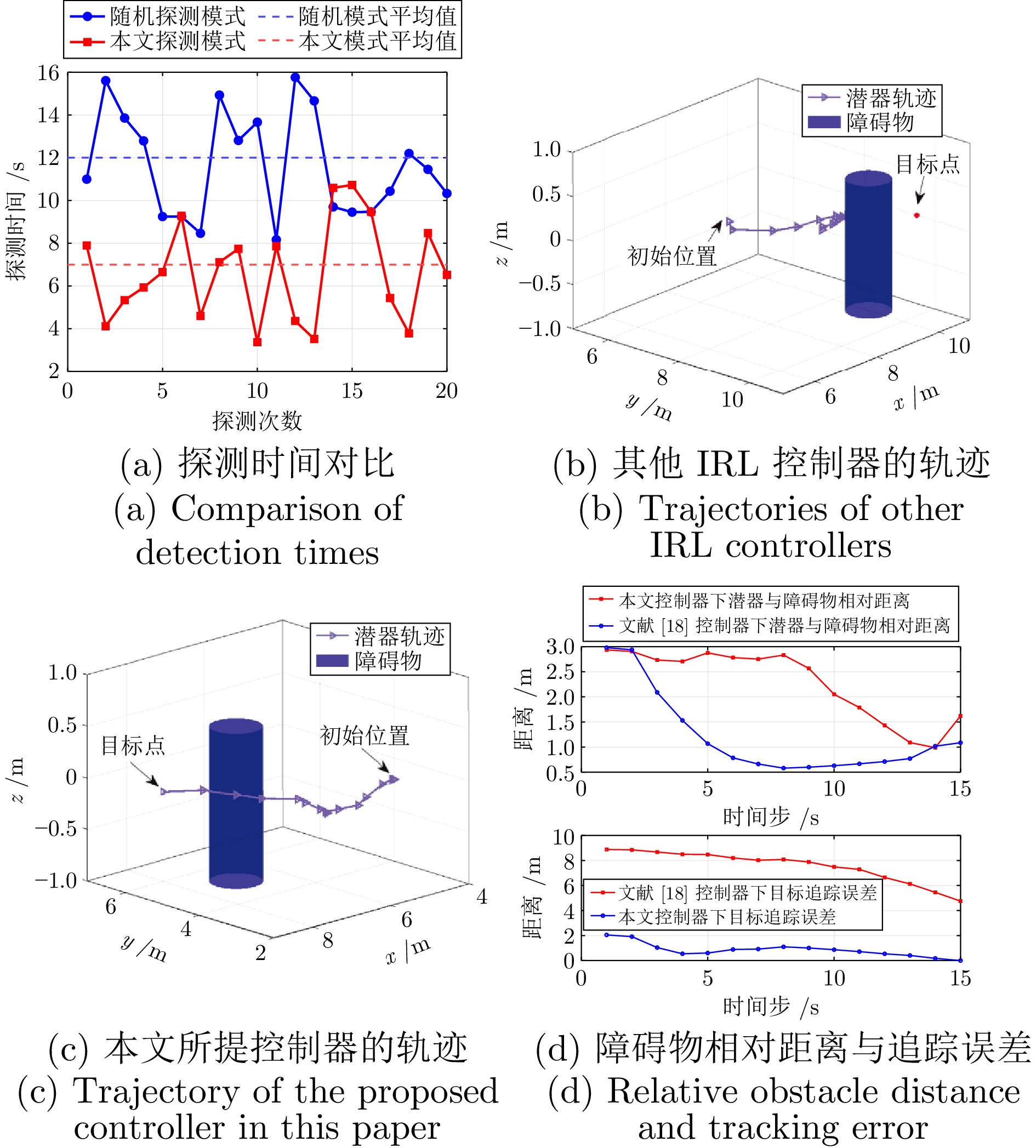
图 11 无人机–水面艇–潜器编队追踪控制器对比
Fig. 11 Comparison of tracking controllers for formation of UAV-USV-AUV
-
[1] 闫敬, 关新平. 海上无人系统跨域集群发展现状及其关键技术. 自动化学报, 2025, 51(4): 744−761Yan Jing, Guan Xin-Ping. Development status and key techniques for cross-domain swarm of maritime unmanned systems. Acta Automatica Sinica, 2025, 51(4): 744−761 [2] Cui S W, Wang Y, Wang S, Wang R, Wang W, Tan M. Real-time perception and positioning for creature picking of an underwater vehicle. IEEE Transactions on Vehicular Technology, 2020, 69(4): 3783−3792 doi: 10.1109/TVT.2020.2973656 [3] Wang Q, Zhang Y X, He B. Intelligent marine survey: Lightweight multi-scale attention adaptive segmentation framework for underwater target detection of AUV. IEEE Transactions on Automation Science and Engineering, 2025, 22(1): 1913−1927 [4] Kim J. Surface target tracking using towed array sonars with direct and bottom bounce underwater sound signals. IEEE Transactions on Signal and Information Processing Over Networks, 2022, 8(1): 997−1007 [5] Chen X L, Huang F H, Pan Y J, Chen Z. Bearing-only-based cooperative target enclosing control for multiple uncrewed surface vehicles with unknown dynamics and sideslip. IEEE Journal of Oceanic Engineering, 2025, 50(2): 1015−1029 doi: 10.1109/JOE.2024.3478311 [6] Tang P, Zhang Y. LiteFlex-YOLO: A lightweight small target detection network for maritime unmanned aerial vehicles. Pervasive and Mobile Computing, 2025, 111(1): 1−22 [7] Ke C, Chen H F. Cooperative path planning for air-sea heterogeneous unmanned vehicles using search-and-tracking mission. Ocean Engineering, 2022, 262(1): 1−13 [8] McCammon S, Santos G M D, Frantz M, Welch T P, Best G, Shearman R K, et al. Ocean front detection and tracking using a team of heterogeneous marine vehicles. Journal of Field Robotics, 2021, 38(6): 854−881 [9] Wu Y, Low K H, Lv C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782−6787 doi: 10.1109/TVT.2020.2991983 [10] Yan J, Lin J S, Yang X, Chen C L, Guan X P. Cooperation detection and tracking of underwater target via aerial-surface-underwater vehicles. IEEE Transactions on Automatic Control, 2025, 70(2): 1068−1083 doi: 10.1109/TAC.2024.3447976 [11] Jiang X W, Jiao R R, Li B, Zhang X H, Yan H C. Finite-time consensus of second-order multiagent systems with input saturation via hybrid sliding-mode control. IEEE Transactions on Automation Science and Engineering, 2025, 22(1): 14623−14632 [12] Jin D Y, Ahn C K, Xiang Z R. Adaptive distributed fuzzy control for prescribed-time formation of multiple autonomous aerial vehicles. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 1589−1599 doi: 10.1109/TAES.2024.3456756 [13] Sun Z B, Wu B L, Wang D W, Chen J Y. Event-triggered model predictive control of spacecraft formation. IEEE Transactions on Automation Science and Engineering, 2025, 22(1): 7696−7711 [14] Wei W, Wang J J, Fang Z R, Chen J R, Ren Y, Dong Y H. 3U: Joint design of UAV-USV-UUV networks for cooperative target hunting. IEEE Transactions on Vehicular Technology, 2023, 72(3): 4085−4090 doi: 10.1109/TVT.2022.3220856 [15] Zhao W B, Liu H, Valavanis K P, Lewis F L. Fault-tolerant formation control for heterogeneous vehicles via reinforcement learning. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 2796−2806 doi: 10.1109/TAES.2021.3139260 [16] Xue W Q, Kolaric P, Fan J L, Lian B S, Chai T Y, Lewis F L. Inverse reinforcement learning in tracking control based on inverse optimal control. IEEE Transactions on Cybernetics, 2022, 52(10): 10570−10581 [17] Lian B S, Kartal Y, Lewis F L, Mikulski D G, Hudas G R, Wan Y, et al. Anomaly detection and correction of optimizing auto-nomous systems with inverse reinforcement learning. IEEE Tran-sactions on Cybernetics, 2023, 53(7): 4555−4566 doi: 10.1109/TCYB.2022.3213526 [18] Tian Z X, Yan J, Yang X, Chen C L, Guan X P. Optimally persistent formation of AUVs with model uncertainty and unknown interaction topology. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(9): 13993−14010 [19] Zhao W B, Liu H, Wan Y, Lin Z L. Data-driven formation control for multiple heterogeneous vehicles in air-ground coordination. IEEE Transactions on Control of Network Systems, 2022, 9(4): 1851−1862 doi: 10.1109/TCNS.2022.3181254 [20] Liu X, Yan H C, Zhou W X, Wang N, Wang Y Y. Event-triggered optimal tracking control for underactuated surface vessels via neural reinforcement learning. IEEE Transactions on Industrial Informatics, 2024, 20(11): 12837−12847 doi: 10.1109/TII.2024.3424573 [21] Wu H J, Yang Z H, Cao J N, Lai L Q. TRiForm: Formation control for underwater sensor networks with measurement errors. IEEE Transactions on Vehicular Technology, 2020, 69(7): 7679−7691 doi: 10.1109/TVT.2020.2989363 [22] Cui R X, Yang C G, Li Y, Sharma S. Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(6): 1019−1029 [23] Liu B, Dousse O, Nain P, Towsley D. Dynamic coverage of mobile sensor networks. IEEE Transactions on Parallel and Distributed Systems, 2012, 24(2): 301−311 [24] Santaló L A. Integral Geometry and Geometric Probability. New York: Cambridge University Press, 2004. [25] Cao W Q, Yan J, Yang X, Luo X Y, Guan X P. Communication-aware formation control of AUVs with model uncertainty and fading channel via integral reinforcement learning. IEEE/CAA Journal of Automatica Sinica, 2023, 10(1): 159−176 [26] Demo for the target detection and tracking strategy based on the UAV-AUV [Online], available: https://v.youku.com/v_show/id_XNjQ5OTE4OTc4OA==.html?spm=a2hkn.playlist.myhome.d_0&playMode=pugv, November 16, 2025 -

 下载:
下载:

图(14)
计量
- 文章访问数: 3876
- HTML全文浏览量: 298
- PDF下载量: 221
- 被引次数: 0
