

Key Theories and Technologies of Cloud Control Platform for Intelligent Connected Unmanned Systems
-
摘要: 针对智慧城市中无人系统因通信架构不统一、任务调度效率低下及数字孪生技术难以支撑实时全局决策所导致的跨域协同难题, 融合云控制系统理论与数字孪生技术, 基于云网边端协同云控制架构, 构建智能网联无人系统云控制平台及关键理论与技术体系. 该体系涵盖云控制系统综合建模、模型−数据联合驱动控制、多运动体跨域协同云控制等关键理论, 研究数字孪生系统、容器化云工作流调度系统、动态云控制系统、远程驾驶系统等关键技术. 在校园场景下部署无人机、无人车、无人船、机器人等异构无人系统, 形成空基、地基、海(水)基动态云并实现跨域协同, 结果验证了所提理论体系的可行性与有效性, 为未来智慧城市发展与跨域无人系统协同应用提供理论支撑与技术路径.Abstract: To address the cross-domain collaborative challenges of unmanned systems in smart cities, which arise from inconsistent communication architectures, inefficient task scheduling, and the inability of digital twin technologies to support real time global decision making, this paper integrates cloud control system theory with digital twin technologies. Based on a cloud-network-edge-terminal collaborative cloud control architecture, we establish a cloud control platform for intelligent connected unmanned systems together with its key theoretical and technical framework. This framework encompasses key theories, such as comprehensive modeling of cloud control systems, model and data-driven joint control, and cross-domain collaborative cloud control for multi-motion bodies. In addition, several key technologies are studied, including a digital twin system, a containerized cloud workflow scheduling system, a dynamic cloud control system, and a remote driving system. A heterogeneous unmanned system composed of unmanned aerial vehicles, unmanned vehicles, unmanned surface vehicles, and robots is deployed in a campus scenario to form aerial-based, ground-based, and sea (water)-based dynamic clouds and to achieve cross-domain collaboration. The results verify the feasibility and effectiveness of the proposed theoretical framework and provide theoretical foundations and technical pathway for future smart city development and cross-domain unmanned system collaborative applications.
-
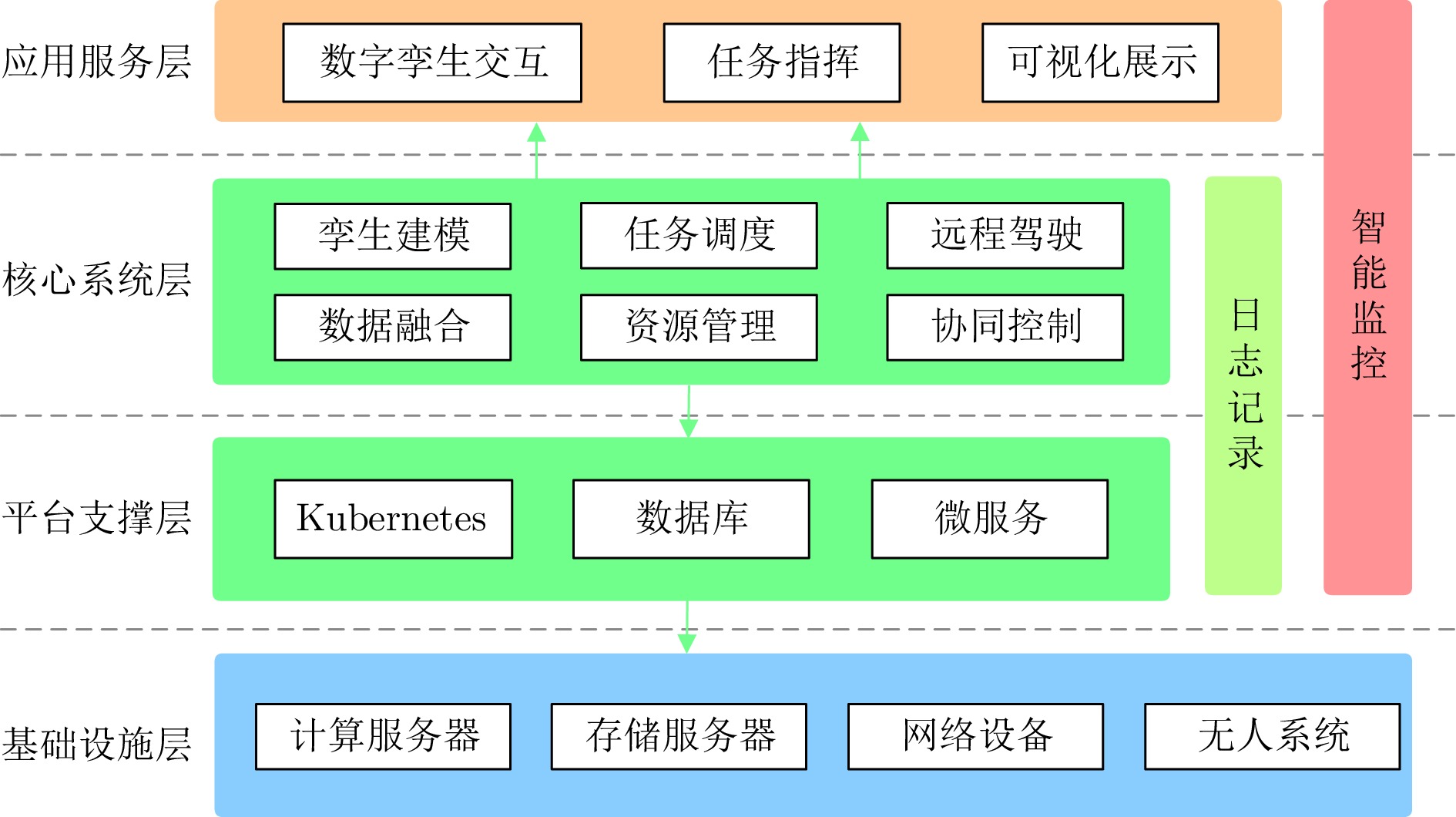
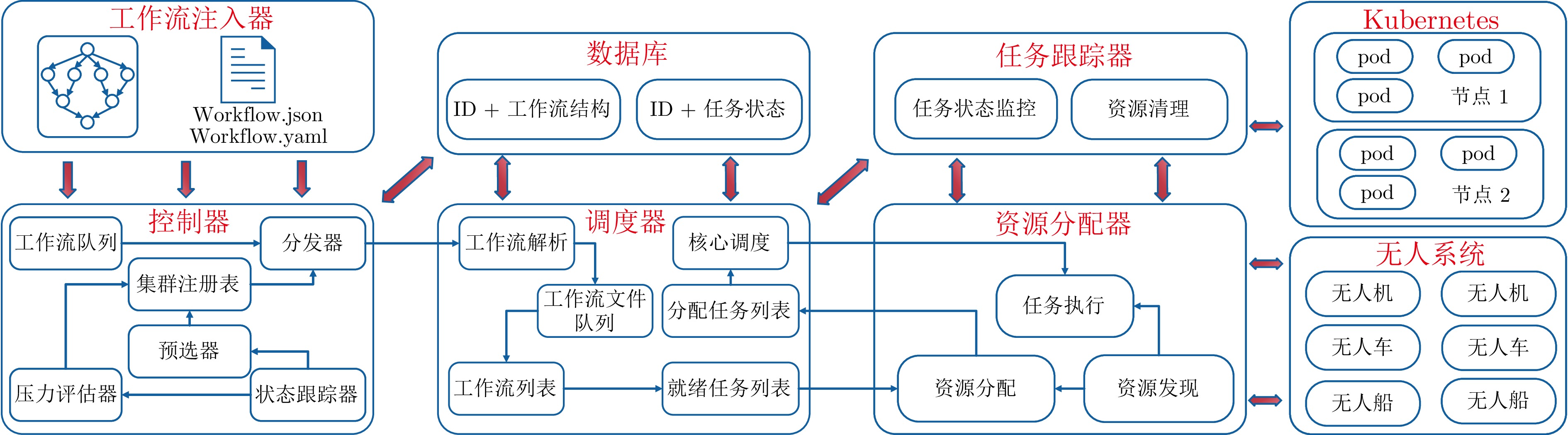
图 1 智能网联无人系统云控制平台架构
Fig. 1 The architecture of cloud control platform for intelligent connected unmanned systems
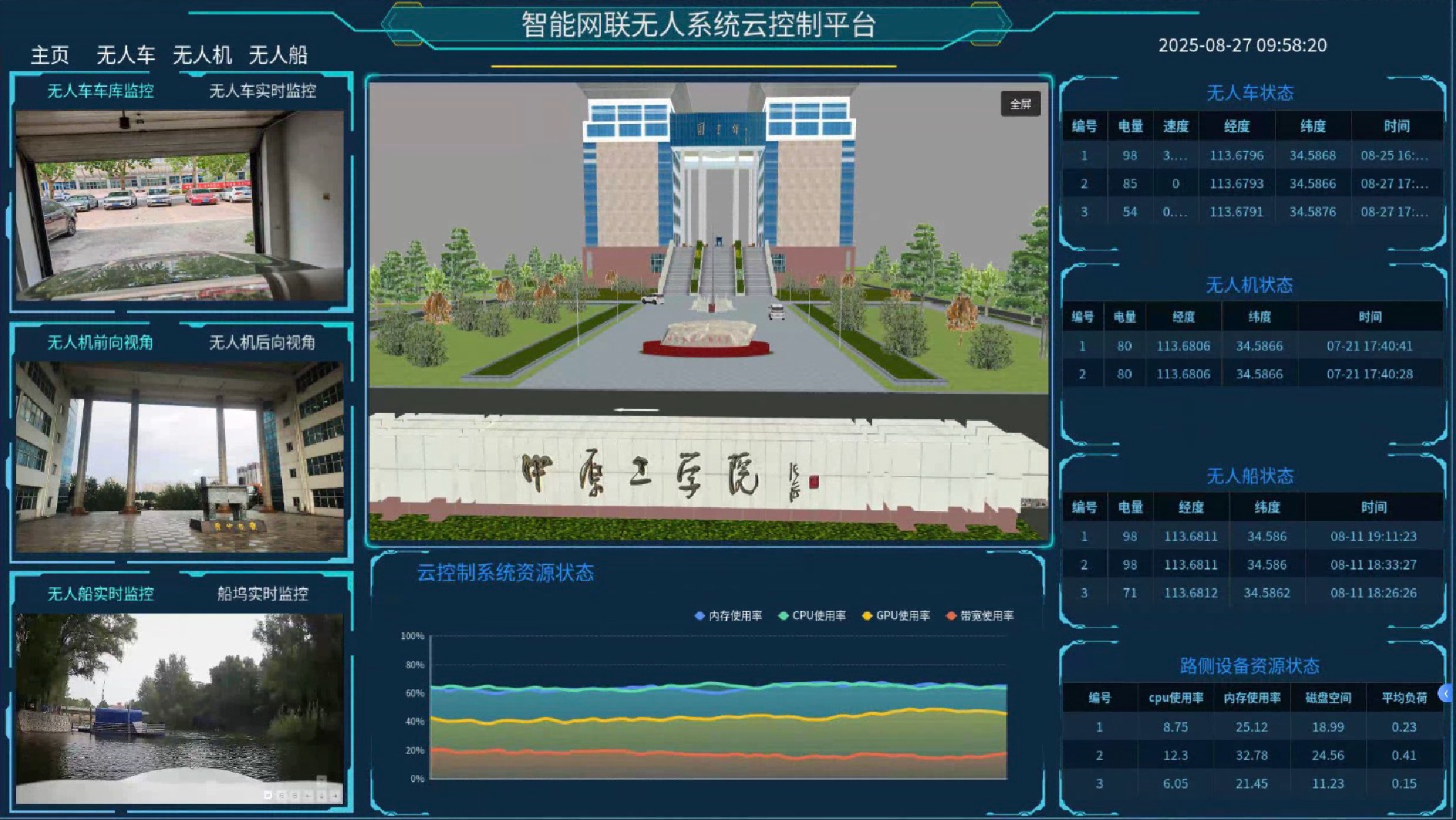
图 2 智能网联无人系统云控制平台可视化界面
Fig. 2 The visual interface of cloud control platform for intelligent connected unmanned systems
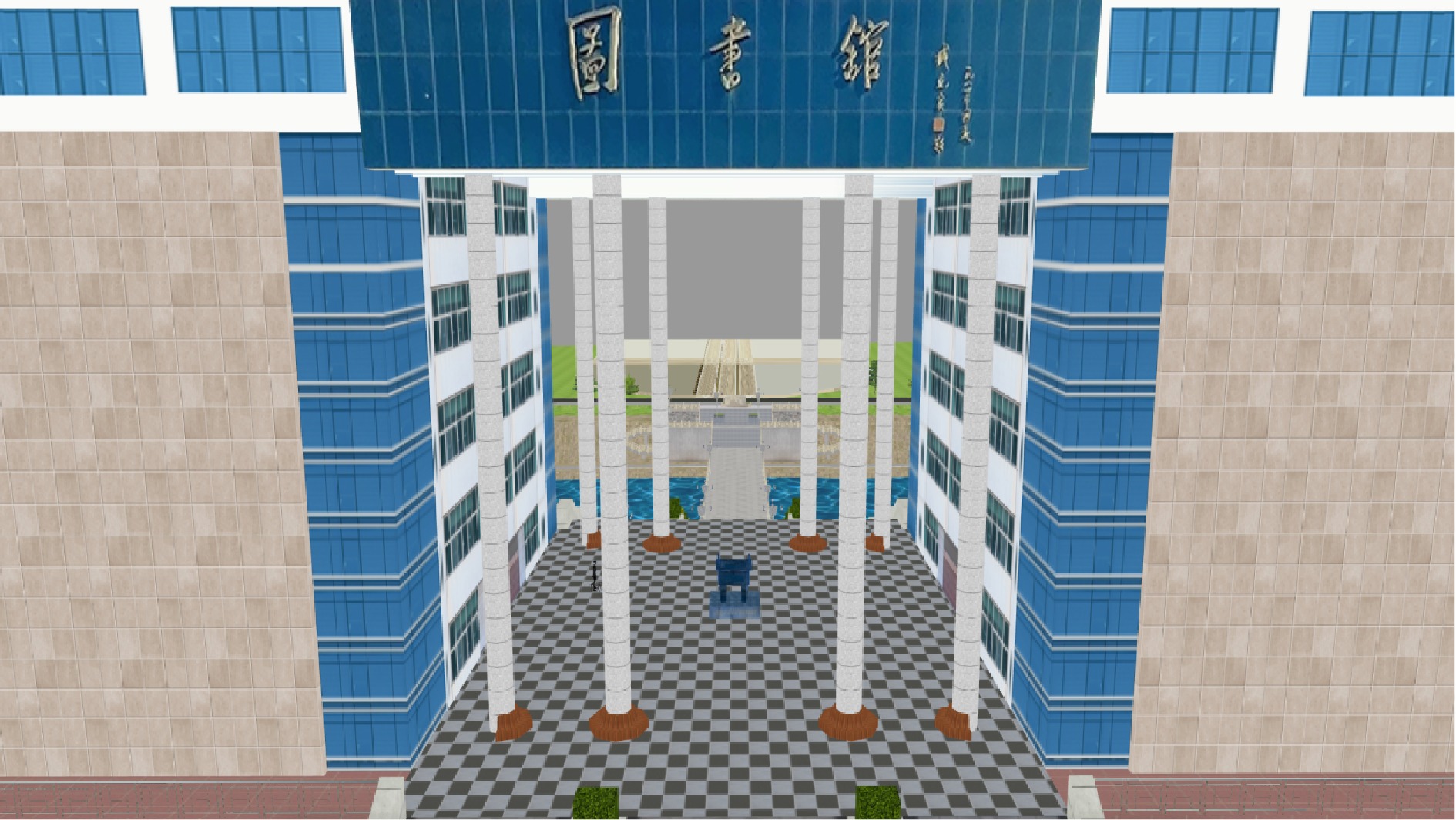
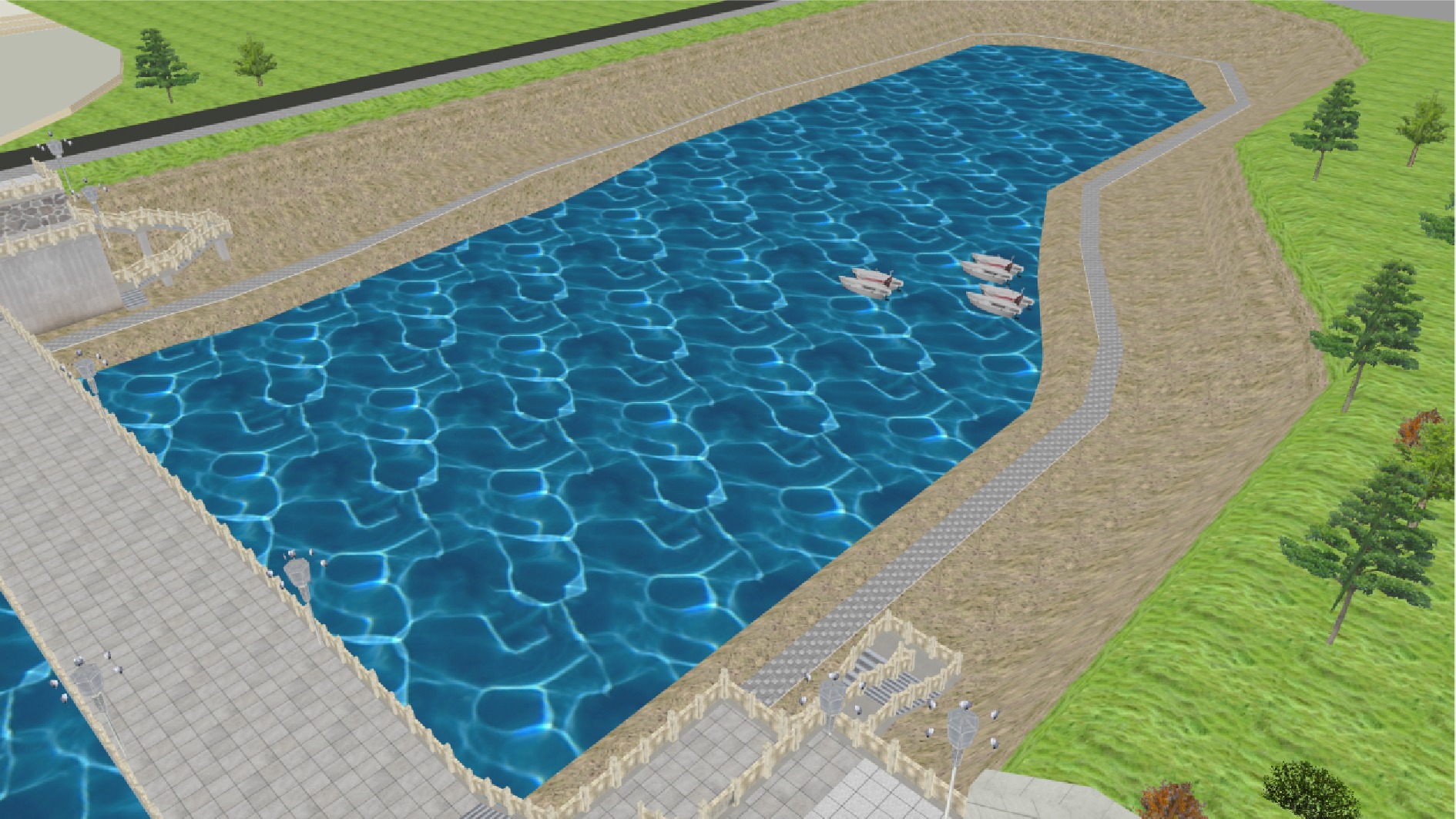
图 4 无人机与机器人数字孪生场地
Fig. 4 The digital twin site for unmanned aerial vehicles and robots
-
[1] Deng T, Zhang K, Shen Z J. A systematic review of a digital twin city: A new pattern of urban governance toward smart cities. Journal of Management Science and Engineering, 2021, 6(2): 125−134 doi: 10.1016/j.jmse.2021.03.003 [2] Khan A, Gupta S, Gupta S K. Emerging UAV technology for disaster detection, mitigation, response, and preparedness. Jou-rnal of Field Robotics, 2022, 39(6): 905−955 doi: 10.1002/rob.22075 [3] Girma A, Bahadori N, Sarkar M, Tadewos T G, Behnia M R, Mahmoud M N, et al. IoT-enabled autonomous system collaboration for disaster-area management. IEEE/CAA Journal of Aut-omatica Sinica, 2020, 7(5): 1249−1262 doi: 10.1109/jas.2020.1003291 [4] 陈龙, 王晓, 杨健健, 艾云峰, 田滨, 李宇宸, 等. 平行矿山: 从数字孪生到矿山智能. 自动化学报, 2021, 47(7): 1633−1645 doi: 10.16383/j.aas.2021.y000001Chen Long, Wang Xiao, Yang Jian-Jian, Ai Yun-Feng, Tian Bin, Li Yu-Chen, et al. Parallel mining operating systems: From digital twins to mining intelligence. Acta Automatica Sinica, 2021, 47(7): 1633−1645 doi: 10.16383/j.aas.2021.y000001 [5] 杨林瑶, 陈思远, 王晓, 张俊, 王成红. 数字孪生与平行系统: 发展现状, 对比及展望. 自动化学报, 2019, 45(11): 2001−2031 doi: 10.16383/j.aas.2019.y000002Yang Lin-Yao, Chen Si-Yuan, Wang Xiao, Zhang Jun, Wang Cheng-Hong. Digital twins and parallel systems: Current status, comparison, and prospects. Acta Automatica Sinica, 2019, 45(11): 2001−2031 doi: 10.16383/j.aas.2019.y000002 [6] Hananto A L, Tirta A, Herawan S G, Idris M, Soudagar M E, Djamari D W, et al. Digital twin and 3D digital twin: Concepts, applications, and challenges in Industry 4.0 for digital twin. Computers, 2024, 13(4): Article No. 100 doi: 10.3390/computers13040100 [7] Allam Z, Jones D S. Future (post-COVID) digital, smart and sustainable cities in the wake of 6G: Digital twins, immersive realities and new urban economies. Land Use Policy, 2021, 101: Article No. 105201 doi: 10.1016/j.landusepol.2020.105201 [8] Fakhraian E, Semanjski I, Semanjski S, Aghezzaf E H. Towards safe and efficient unmanned aircraft system operations: Literature review of digital twins applications and European union regulatory compliance. Drones, 2023, 7(7): Article No. 478 doi: 10.3390/drones7070478 [9] Clemente D, Calheiros-Cabral T, Rosa-Santos P, Taveira-Pinto F. Blue seaports: The smart, sustainable and electrified ports of the future. Smart Cities, 2023, 6(3): 1560−1588 doi: 10.3390/smartcities6030074 [10] Hildmann H, Kovacs E. Using unmanned aerial vehicles (UAVs) as mobile sensing platforms (MSPs) for disaster response, civil security and public safety. Drones, 2019, 3(3): Article No. 59 doi: 10.3390/drones3030059 [11] Ding W, Xu C, Arief M, Lin H, Li B, Zhao D. A survey on safety-critical driving scenario generation——A methodological perspective. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 6971−6988 doi: 10.1109/TITS.2023.3259322 [12] 国家发展改革委. 关于深化智慧城市发展 推进城市全域数字化转型的指导意见 [Online], available: https://www.ndrc.gov.cn/xxgk/zcfb/tz/202405/t20240520_1386326.html, 2024-05-20National Development and Reform Commission. Guidelines on deepening the development of smart cities and advancing the digital transformation of cities across all sectors [Online], available: https://www.ndrc.gov.cn/xxgk/zcfb/tz/202405/t20240520_1386326.html, May 20, 2024 [13] 中共中央办公厅. 关于推进新型城市基础设施建设打造韧性城市的意见 [Online], available: https://www.gov.cn/zhengce/202412/content_6991173.htm, 2024-12-05The General Office of the Communist Party of China Central Committee. Opinions on promoting the construction of new urban infrastructure to build resilient cities [Online], available: https://www.gov.cn/zhengce/202412/content_6991173.htm, December 05, 2024 [14] 郭戈, 许阳光, 徐涛, 李丹丹, 王云鹏, 袁威. 网联共享车路协同智能交通系统综述. 控制与决策, 2019, 34(11): 2375−2389 doi: 10.13195/j.kzyjc.2019.1316Guo Ge, Xu Yang-Guang, Xu Tao, Li Dan-Dan, Wang Yun-Peng, Yuan Wei. A survey of connected shared vehicle-road cooperative intelligent transportation systems. Control and Decision, 2019, 34(11): 2375−2389 doi: 10.13195/j.kzyjc.2019.1316 [15] 胡云峰, 曲婷, 刘俊, 施竹清, 朱冰, 曹东璞, 等. 智能汽车人机协同控制的研究现状与展望. 自动化学报, 2019, 45(7): 1261−1280Hu Yun-Feng, Qu Ting, Liu Jun, Shi Zhu-Qing, Zhu Bing, Cao Dong-Pu, et al. Research status and prospects of human-machine cooperative control for intelligent vehicles. Acta Automatica Sinica, 2019, 45(7): 1261−1280 [16] Li T, Hu H. Development of the use of unmanned aerial vehicles (UAVs) in emergency rescue in China. Risk Management and Healthcare Policy, 2021, 14: 4293−4299 doi: 10.2147/RMHP.S323727 [17] 雷添杰, 李长春, 何孝莹. 无人机航空遥感系统在灾害应急救援中的应用. 自然灾害学报, 2011, 20(1): 178−183 doi: 10.3969/j.issn.2096-4137.2022.21.061Lei Tian-Jie, Li Chang-Chun, He Xiao-Ying. Application of UAV aerial remote sensing system in disaster emergency rescue. Journal of Natural Disasters, 2011, 20(1): 178−183 doi: 10.3969/j.issn.2096-4137.2022.21.061 [18] 杨少龙, 孙延浩, 黄金, 向先波. 面向任意位置姿态估计的无人艇虚实交互研究. 舰船科学技术, 2021, 43(6): 151−156 doi: 10.3404/j.issn.1672-7649.2021.06.029Yang Shao-Long, Sun Yan-Hao, Huang Jin, Xiang Xian-Bo. Research on virtual-reality interaction of unmanned surface vehicle for arbitrary position and pose estimation. Ship Science and Technology, 2021, 43(6): 151−156 doi: 10.3404/j.issn.1672-7649.2021.06.029 [19] 王凯, 徐浩, 张梦妍, 黄连忠, 马冉祺, 王建行, 等. 数字孪生技术在水路运输领域的应用及研究. 中国舰船研究, 2023, 18(5): 1−10 doi: 10.19693/j.issn.1673-3185.02451Wang Kai, Xu Hao, Zhang Meng-Yan, Huang Lian-Zhong, Ma Ran-Qi, Wang Jian-Hang, et al. Application and research of digital twin technology in waterway transportation. Chinese Jour-nal of Ship Research, 2023, 18(5): 1−10 doi: 10.19693/j.issn.1673-3185.02451 [20] Xia Y Q. From networked control systems to cloud control systems. In: Proceedings of the 31st Chinese Control Conference. Hefei, China: IEEE, 2012. 5878−5883 [21] Xia Y Q. Cloud control systems. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2): 134−142 doi: 10.1016/b978-0-12-818701-2.00012-3 [22] Xia Y Q, Qin Y M, Zhai D H, Chai S C. Further results on cloud control systems. Science China Information Sciences, 2016, 59: Article No. 073201 doi: 10.1007/s11432-016-5586-9 [23] 夏元清. 云控制系统及其面临的挑战. 自动化学报, 2016, 42(1): 1−12Xia Yuan-Qing. Cloud control systems and their challenges. Acta Automatica Sinica, 2016, 42(1): 1−12 [24] Shi W S, Cao J, Zhang Q, Li Y H Z, Xu L Y. Edge computing: Vision and challenges. IEEE Internet of Things Journal, 2016, 3(5): 637−646 doi: 10.1109/JIOT.2016.2579198 [25] Gao R Z, Xia Y Q, Dai L, Sun Z Q, Zhan Y F. Design and implementation of data-driven predictive cloud control system. Journal of Systems Engineering and Electronics, 2022, 33(6): 1258−1268 [26] Gao R Z, Li Q W, Dai L, Zhan Y F, Xia Y Q. Workflow-based fast data-driven predictive control with disturbance observer in cloud-edge collaborative architecture. IEEE Transactions on Automation Science and Engineering, 2023, 21(3): 2816−2840 doi: 10.1109/tase.2023.3270203 [27] Guo G, Wang Y P. An integrated MPC and deep reinforcement learning approach to trams-priority active signal control. Control Engineering Practice, 2021, 110: Article No. 104758 doi: 10.1016/j.conengprac.2021.104758 [28] Gao R Z, Zhou T, Dai L, Zou Z L, Xia Y Q. Cloud-enabled workflow-based real-time MPC for autonomous vehicle dynamical trajectory tracking. IEEE Transactions on Vehicular Technology, DOI: 10.1109/TVT.2025.3630061 [29] 柴天佑, 周正, 郑锐, 刘宁, 贾瑶. 端边云协同的PID整定智能系统. 自动化学报, 2023, 49(3): 514−527Chai Tian-You, Zhou Zheng, Zheng Rui, Liu Ning, Jia Yao. PID tuning intelligent system based on end-edge-cloud collaboration. Acta Automatica Sinica, 2023, 49(3): 514−527 [30] 夏元清, 王晁, 高润泽, 詹玉峰, 孙中奇, 戴荔, 等. 云网边端协同云控制研究进展及挑战. 信息与控制, 2024, 53(3): 273−286 doi: 10.13976/j.cnki.xk.2024.4007Xia Yuan-Qing, Wang Chao, Gao Run-Ze, Zhan Yu-Feng, Sun Zhong-Qi, Dai Li, et al. Research progress and challenges of cloud-network-edge-end collaborative cloud control. Information and Control, 2024, 53(3): 273−286 doi: 10.13976/j.cnki.xk.2024.4007 [31] Dragoni N, Giallorenzo S, Lafuente A L, Mazzara M, Montesi F, Mustafin R, et al. Microservices: Yesterday, today, and tomorrow. Present and Ulterior Software Engineering, 2017, 6: 195−216 doi: 10.2307/jj.5993309.17 [32] 董超, 陶婷, 冯斯梦, 屈毓锛, 刘青昕, 吴钰蕾, 等. 面向无人机自组网和车联网的媒体接入控制协议研究综述. 电子与信息学报, 2022, 44(3): 790−802Dong Chao, Tao Ting, Feng Si-Meng, Qu Yu-Ben, Liu Qing-Xin, Wu Yu-Lei, et al. A survey on media access control protocols for UAV networks and vehicular networks. Journal of Electronics & Information Technology, 2022, 44(3): 790−802 [33] Yang L W, Ye L J, Xia Y Q, Zhan Y F. Look-ahead workflow scheduling with width changing trend in clouds. Future Generation Computer Systems, 2023, 139: 139−150 doi: 10.1016/j.future.2022.09.013 [34] Ye L J, Xia Y Q, Tao S Y, Yan C, Gao R Z, Zhan Y F. Reliability-aware and energy-efficient workflow scheduling in IaaS clouds. IEEE Transactions on Automation Science and Engineering, 2022, 20(3): 2156−2169 [35] Hammoud A, Sami H, Mourad A, Otrok H, Mizouni R, Bentahar J. AI, blockchain, and vehicular edge computing for smart and secure IoV: Challenges and directions. IEEE Internet of Th-ings Magazine, 2020, 3(2): 68−73 doi: 10.1109/IOTM.0001.1900109 [36] Shan C G, Xia Y Q, Zhan Y F, Zhang J H. KubeAdaptor: A docking framework for workflow containerization on Kubernetes. Future Generation Computer Systems, 2023, 148: 584−599 doi: 10.1016/j.future.2023.06.022 [37] Liu D Y, Xia Y Q, Shan C G, Tian K, Zhan Y F. A Kubernetes-based scheme for efficient resource allocation in containerized workflow. Future Generation Computer Systems, 2025, 166: Article No. 107699 doi: 10.1016/j.future.2024.107699 [38] Shan C G, Gao R Z, Yang Z, Zhang W, Xia Y Q. ControlService: A containerized solution for control-algorithm-as-a-service in cloud control systems. Science China Information Sciences, 2024, 67(8): Article No. 182201 doi: 10.1007/s11432-023-4017-0 [39] Gao R Z, Xia Y Q, Wang G, Yang L W, Zhan Y F. Fast subspace identification method based on containerised cloud workflow processing system. IEEE Transactions on Automation Science and Engineering, 2023, 21(4): 5725−5737 doi: 10.1109/tase.2023.3316287 [40] Zhou X, Zhu J C, Zhou H Y, Xu C, Gao F. EGO-swarm: A fully autonomous and decentralized quadrotor swarm system in cluttered environments. In: Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Xi'an, China: IEEE, 2021. 4101−4107 -

 下载:
下载:








图(18)
计量
- 文章访问数: 3167
- HTML全文浏览量: 458
- PDF下载量: 237
- 被引次数: 0
