

Finite-iteration Learning Error-tracking Control for a Class of Uncertain Discrete-time Systems
-
摘要: 针对一类在有限时间内执行重复任务的不确定离散时间系统轨迹跟踪问题, 提出一种有限次迭代学习误差跟踪控制方法. 首先, 构造不依赖于参考轨迹的期望误差轨迹, 放宽传统迭代学习控制中的初值一致条件, 且离散形式的期望误差轨迹设计仅需已知每次迭代的误差初值, 简化设计要求. 其次, 通过在迭代轴上构建饱和迭代吸引律, 设计带有干扰补偿的迭代学习控制器, 并推导出跟踪误差的稳态误差带和满足精度要求所需的最大迭代次数表达式, 根据期望精度选择控制器参数, 在参数设计阶段保证系统鲁棒性, 实现跟踪误差有限次迭代收敛. 最后, 通过数值仿真和实验结果验证所提控制方法的有效性.Abstract: In this paper, a finite-iteration learning error-tracking control method is proposed for the trajectory tracking problem of a class of uncertain discrete-time systems that perform repetitive tasks in finite time. Firstly, a desired error trajectory that is independent of the reference trajectory is constructed to relax the initial value consistency condition in traditional iterative learning control. Moreover, the design of the discrete form of the desired error trajectory only requires the initial error values for each iteration, simplifying the design requirements. Secondly, by constructing a saturated iterative attraction law along the iterative axis, an iterative learning controller with disturbance compensation is designed, and the steady-state error band of the tracking error and the expression of the maximum number of iterations required to meet the accuracy requirements are derived. The controller parameters are selected based on the expected accuracy, and the robustness of the system is guaranteed in the parameter design stage to achieve finite-iteration convergence of the tracking error. Finally, the effectiveness of the proposed control method is verified through numerical simulation and experimental results.
-
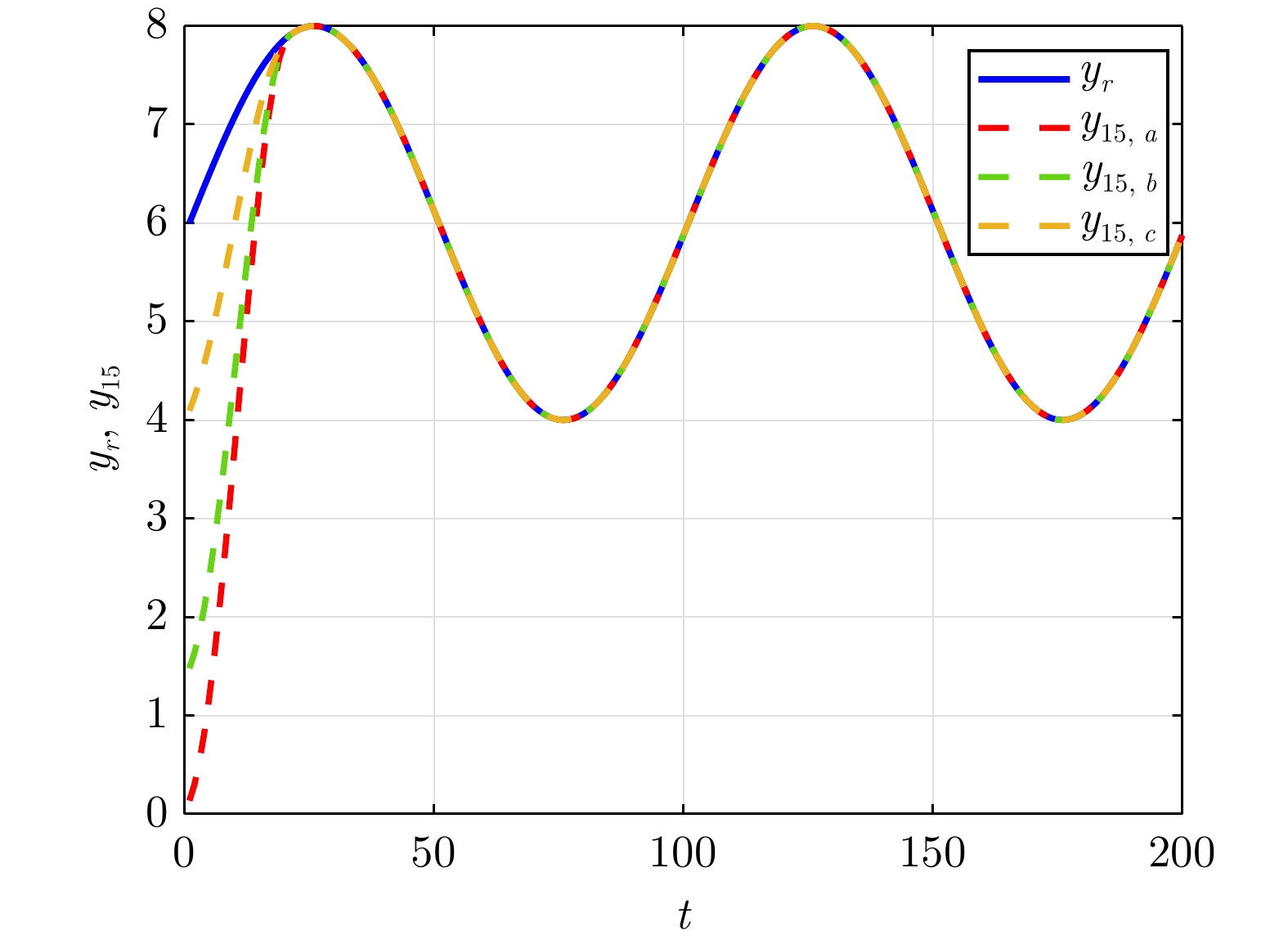
图 2 不同初始状态下输出角速度$y_{15} $和参考角速度$y_{r} $
Fig. 2 Output angular velocity $y_{15} $ and reference angular velocity $y_{r} $ under different initial conditions
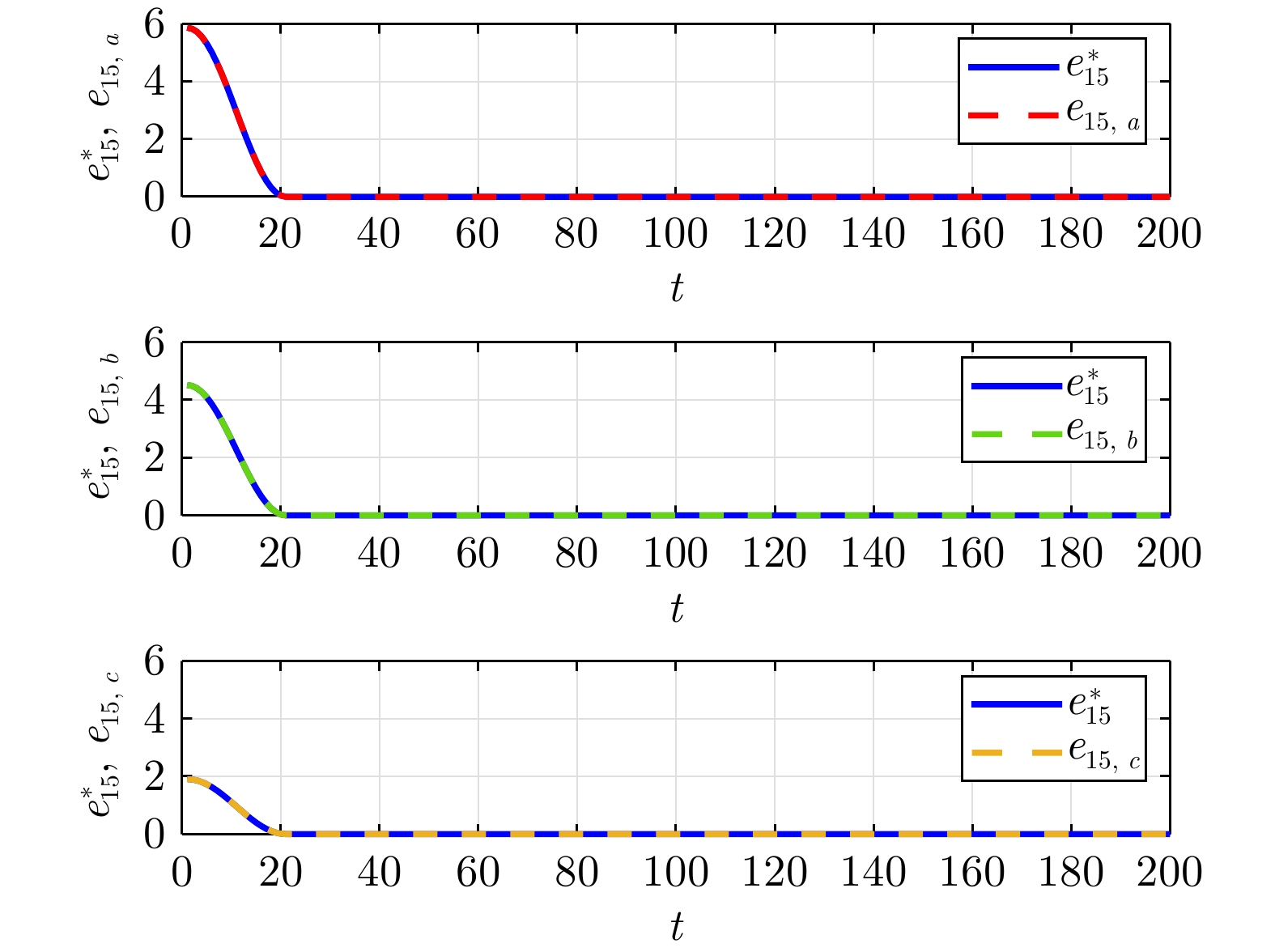
图 3 不同初始状态下误差轨迹$e_{15} $和期望误差轨迹$ e_{15}^{\ast }$
Fig. 3 Error trajectory $e_{15} $ and desired error trajectory $e_{15}^{\ast } $ under different initial conditions
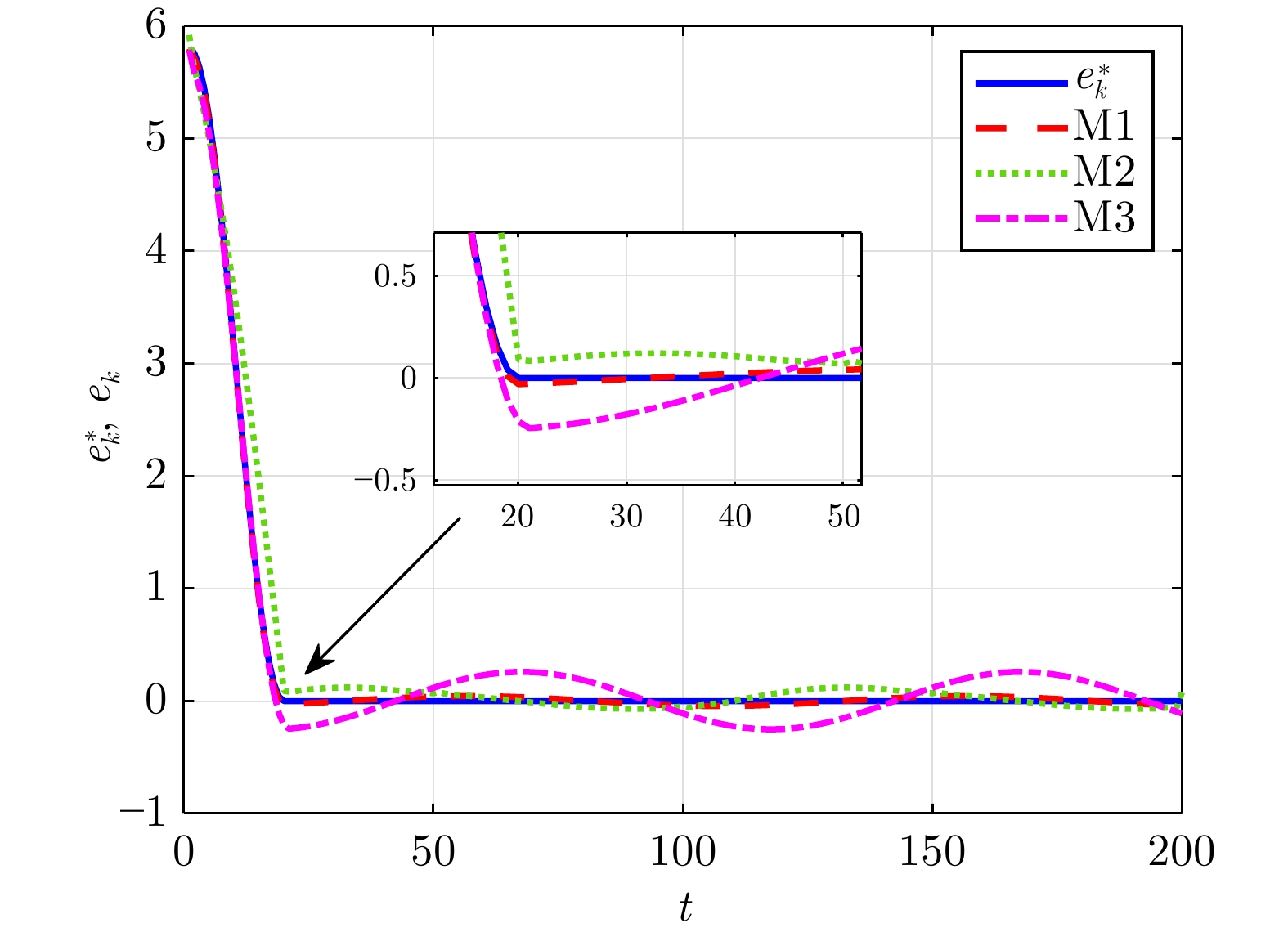
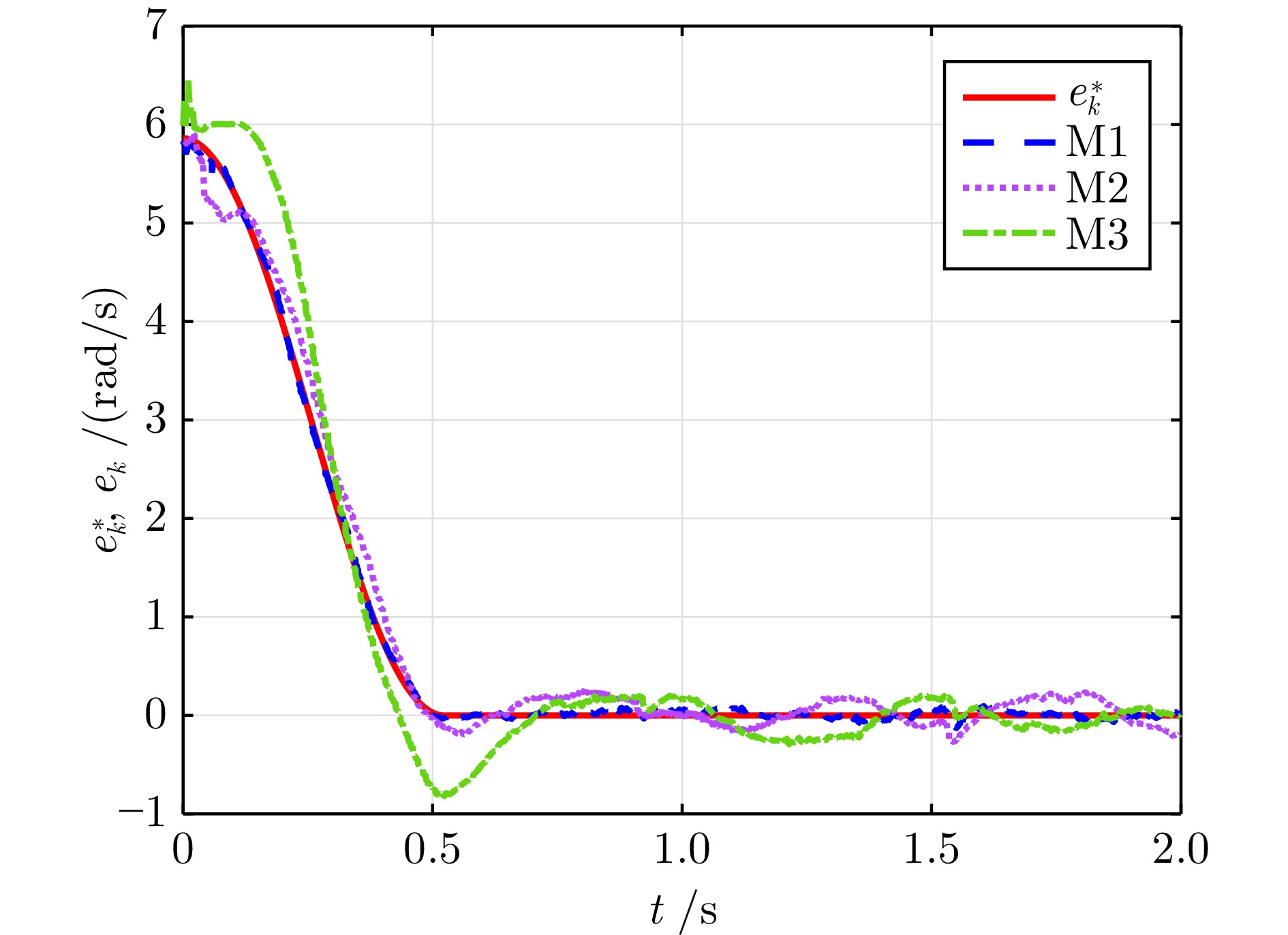
图 5 期望误差轨迹$e_{k}^{\ast } $和跟踪误差$e_{k} $
Fig. 5 Expected error trajectory $e_{k}^{\ast } $ and tracking error $e_{k} $
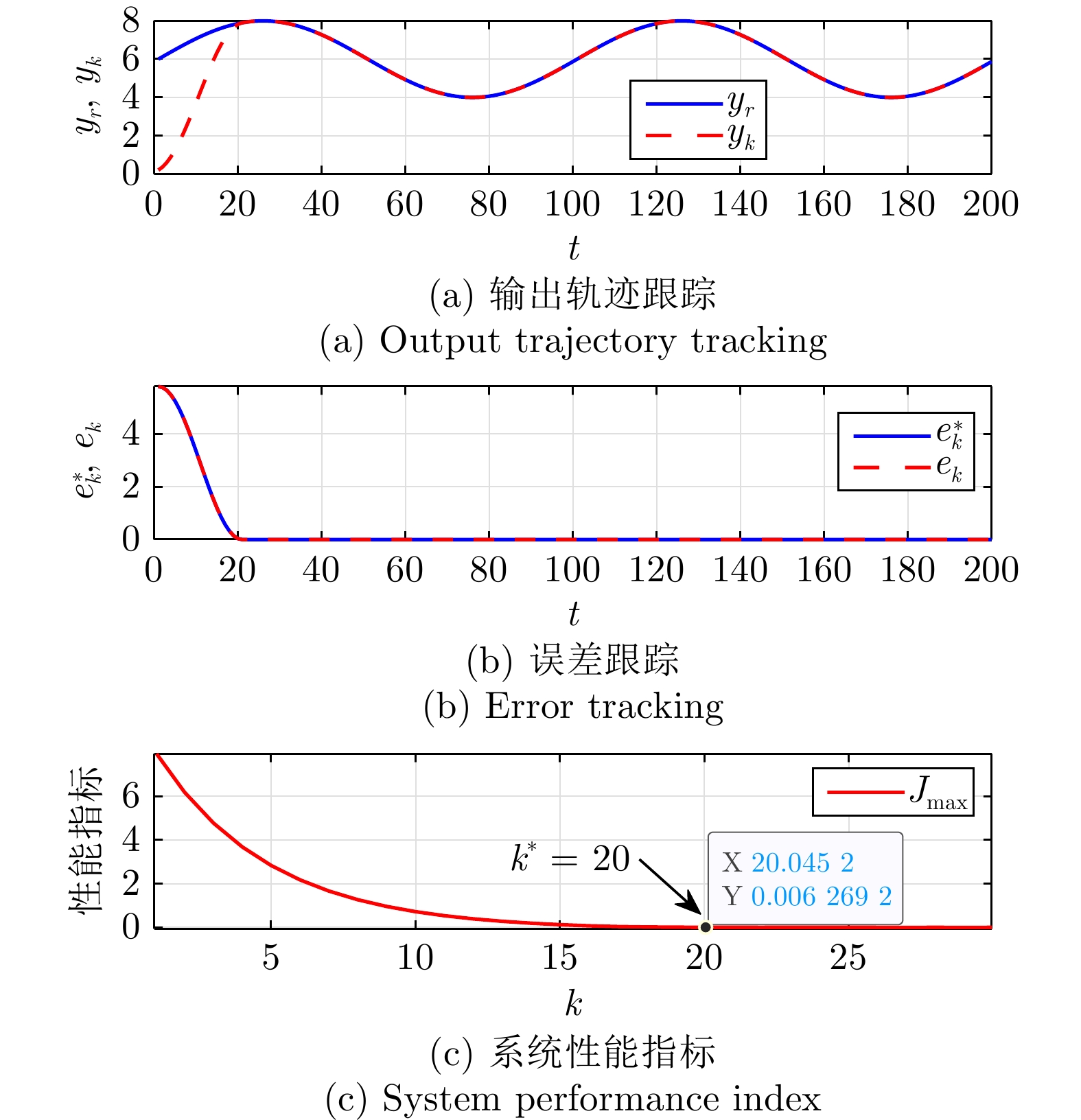
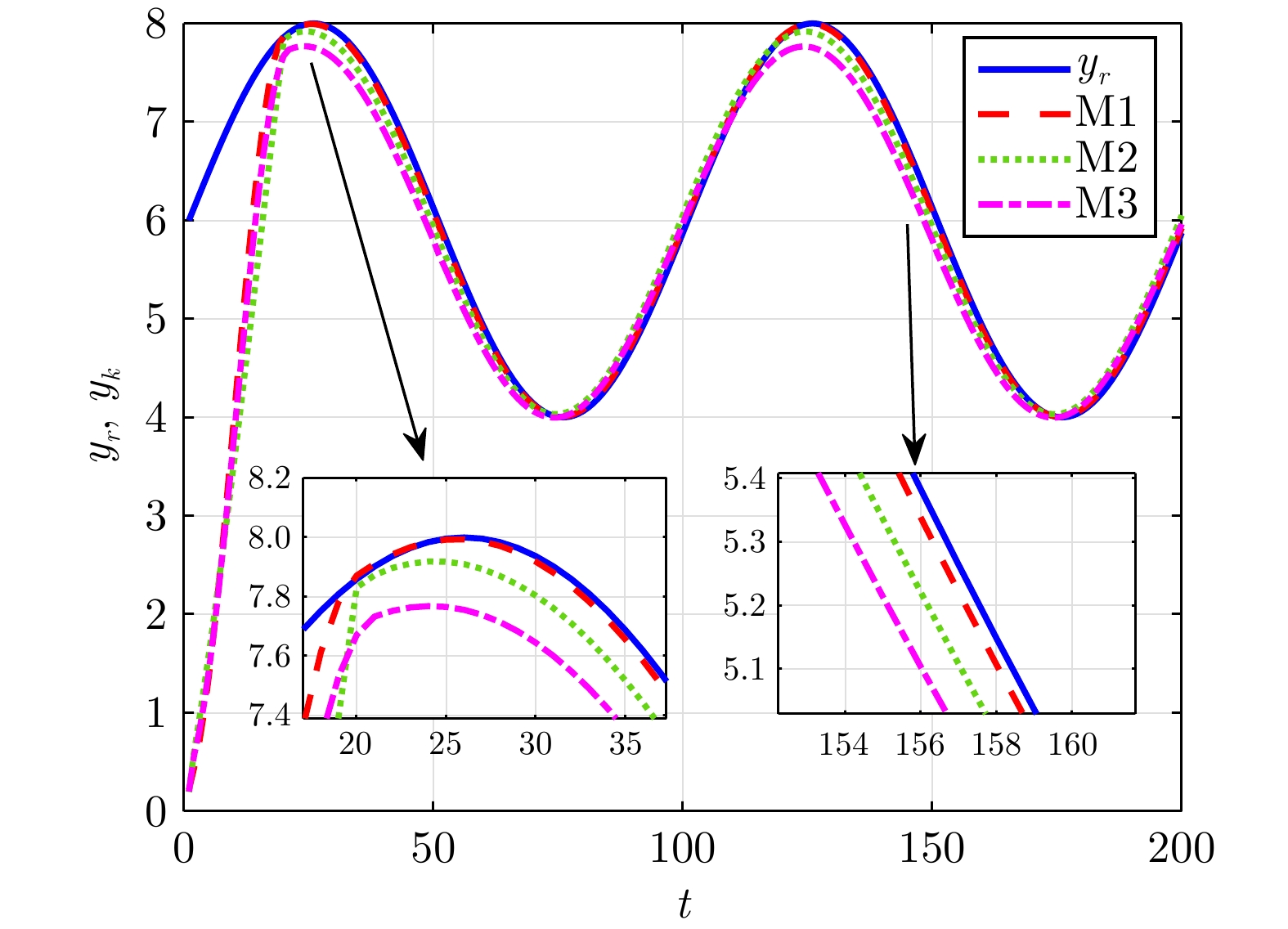
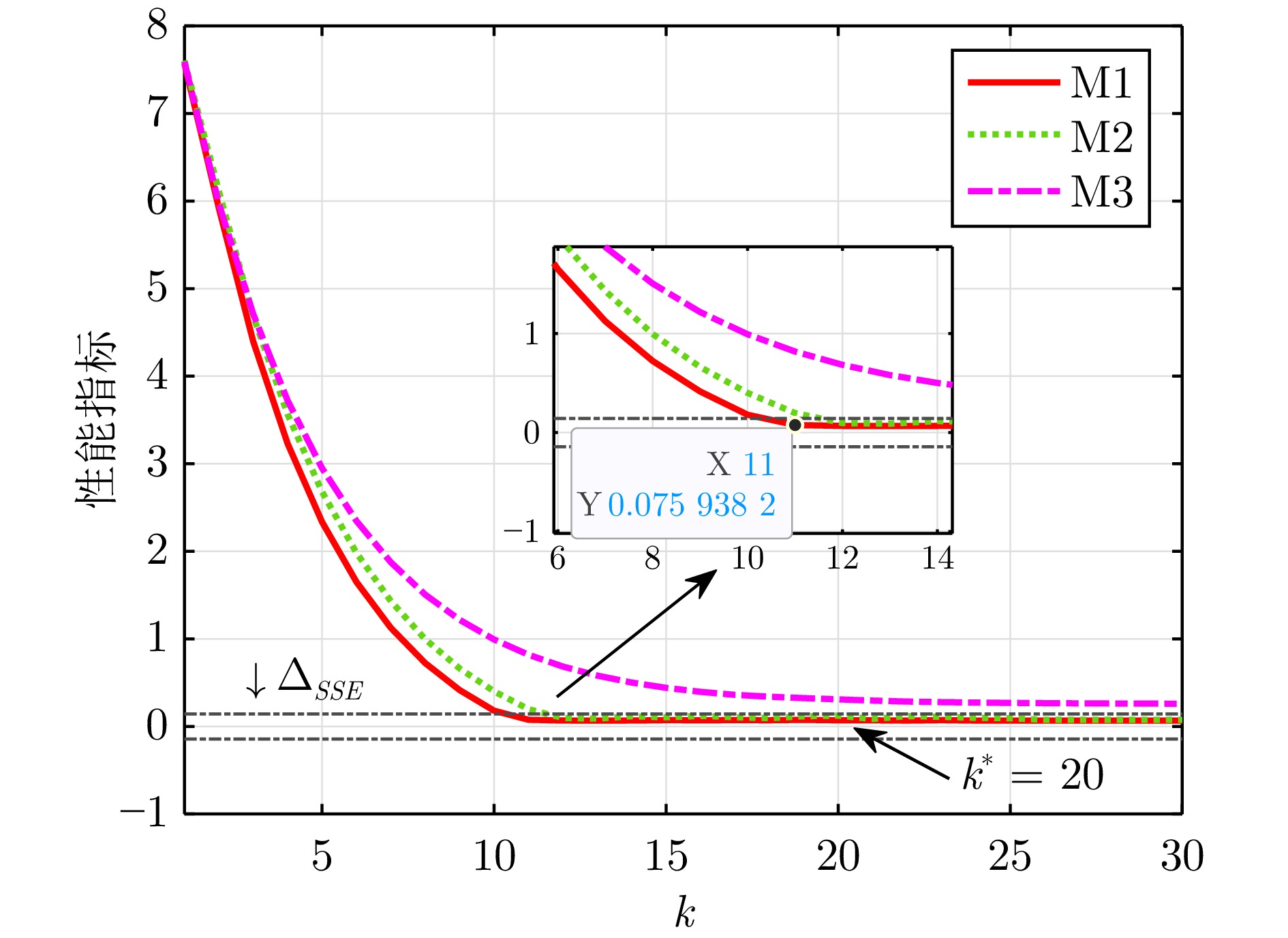
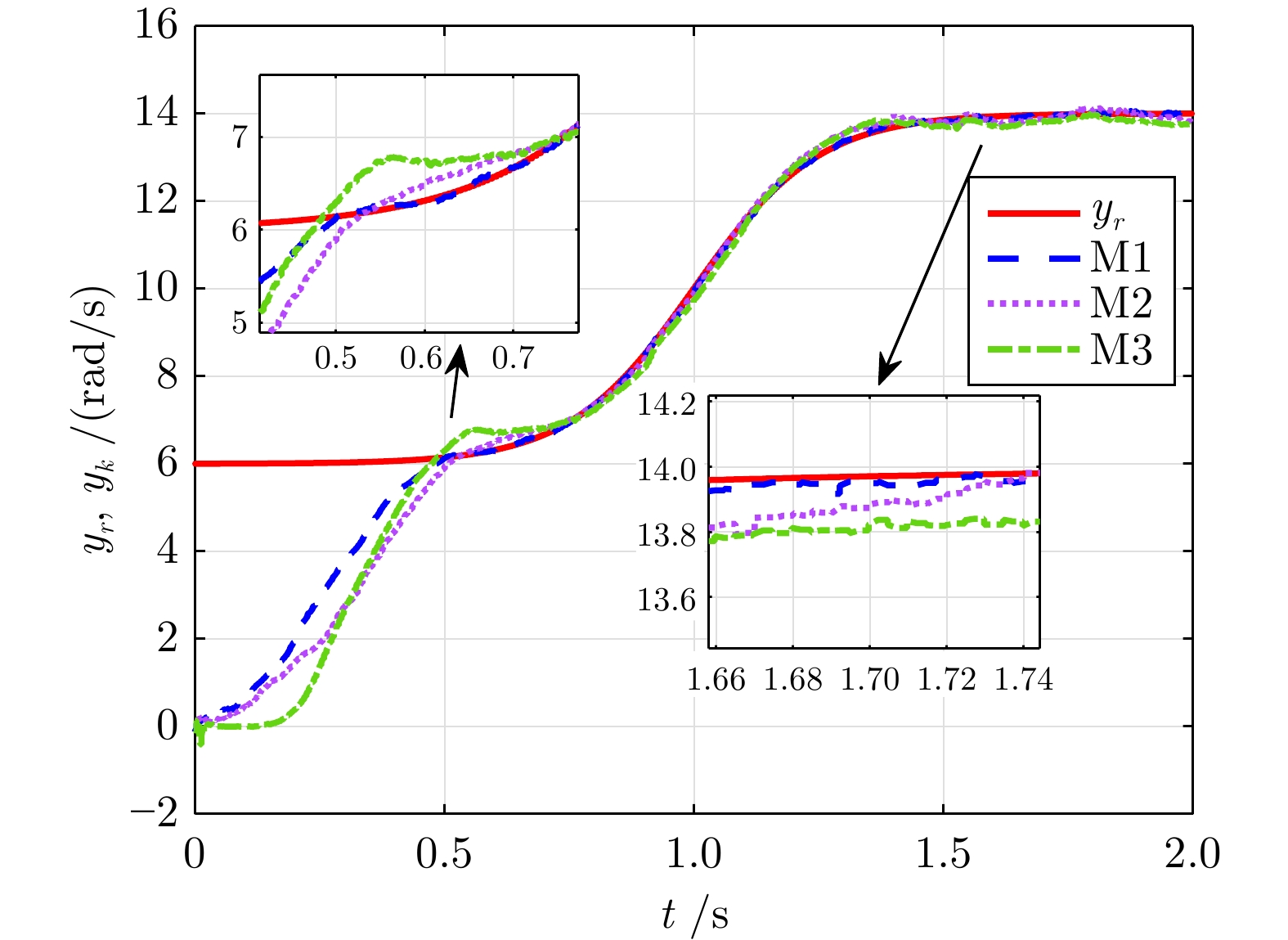
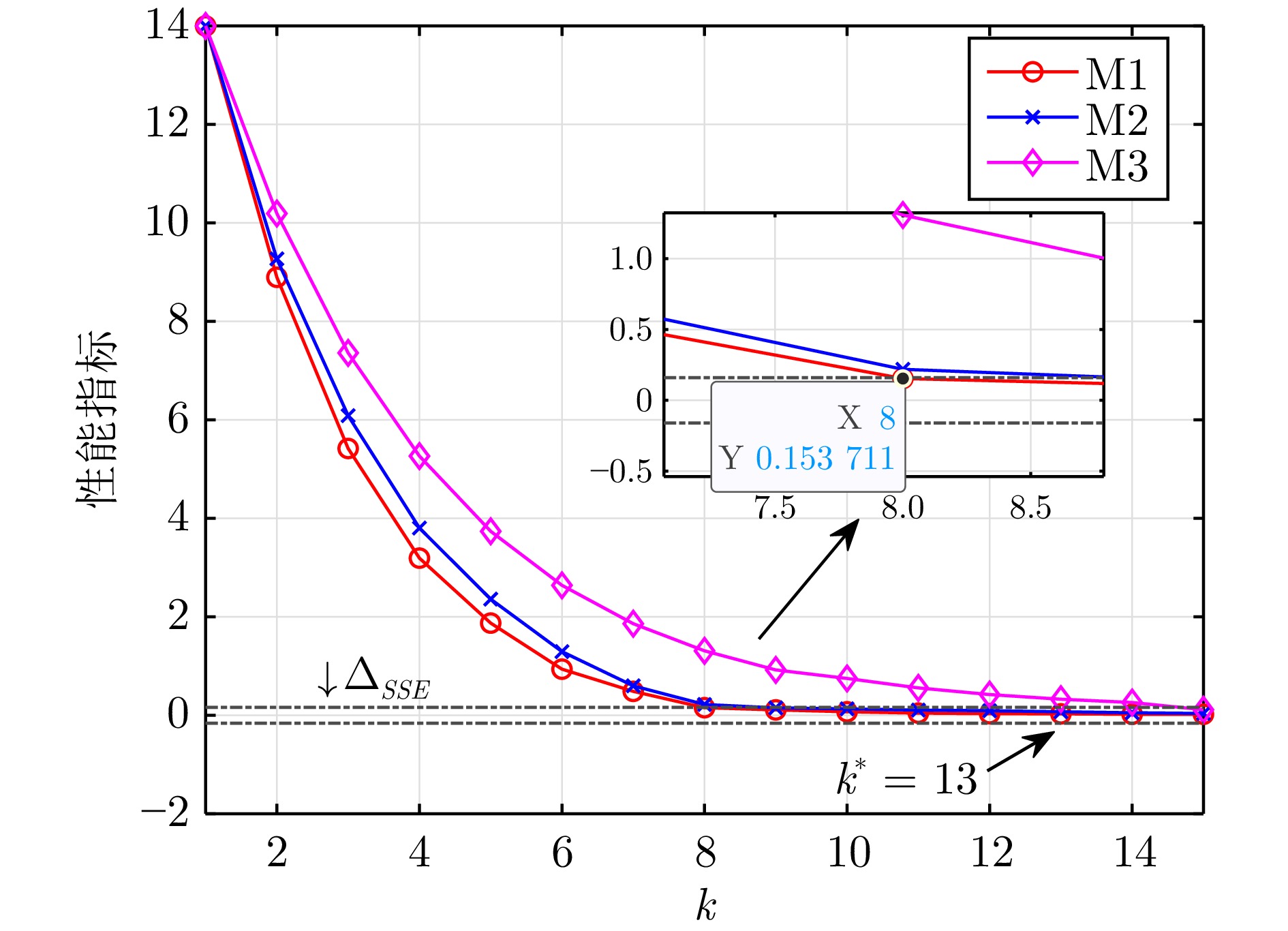
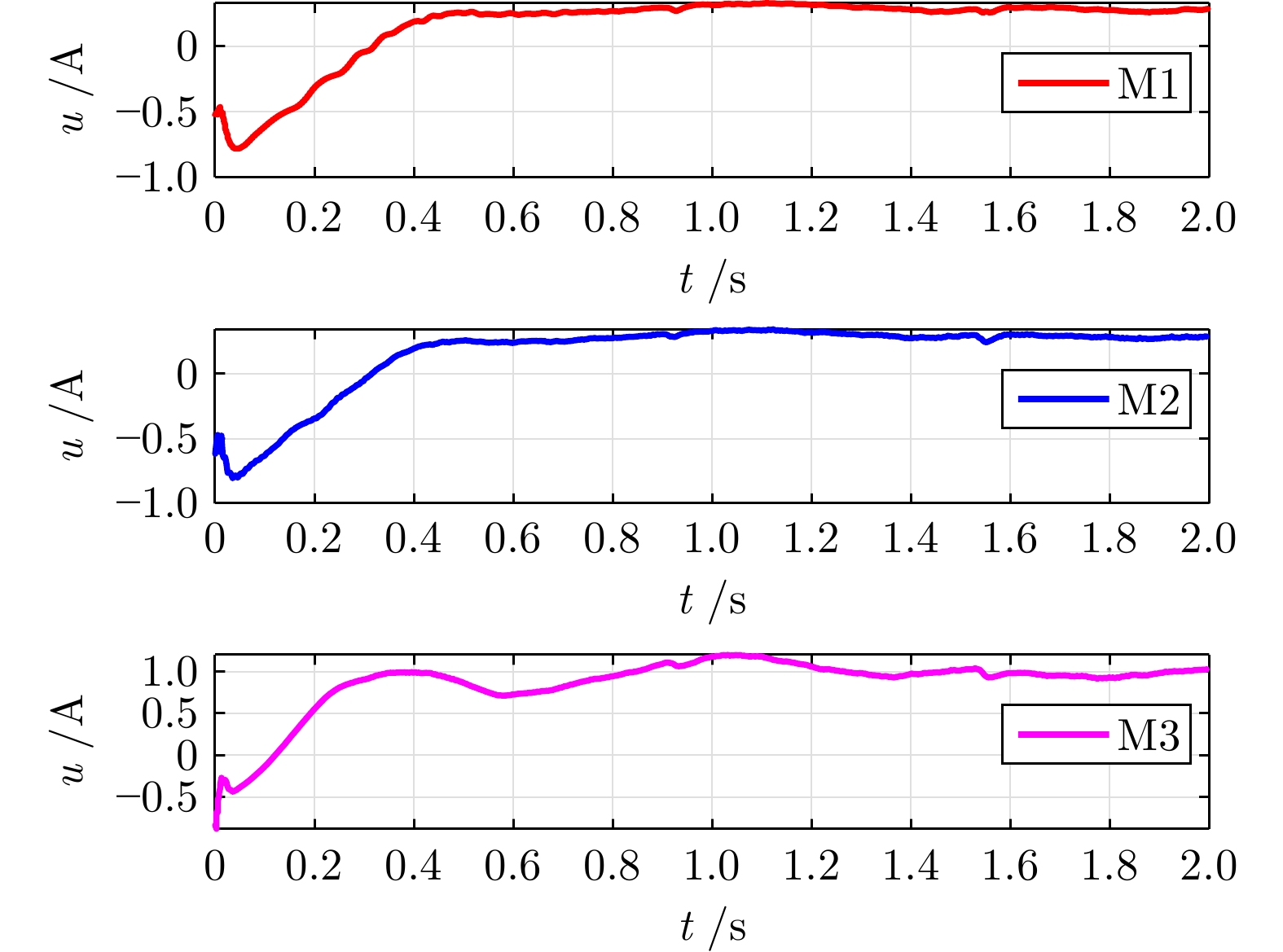
图 7 输出跟踪$ y_k$、误差跟踪$e_{k} $和性能指标
Fig. 7 Output tracking $ y_k$, error tracking $e_{k} $ and performance index
表 1 永磁同步电机参数
Table 1 Permanent magnet synchronous motor parameters
物理量 参数 值 惯性系数 $ J\;({\rm{kg}} \cdot {\rm{m}}^{2}) $ 0.0275 负载转矩 $ T_{L}\;({\rm{N}} \cdot {\rm{m}}) $ $ 0.5\sin \theta $ 磁通 $ \psi _{f} \;({\rm{Wb}}) $ 0.109 极对数 $ n_{p} $ 4 摩擦系数 $ B \;({\rm{N \cdot m/(rad/s)}}) $ 0.0012  下载: 导出CSV
下载: 导出CSV
-
[1] 许建新, 侯忠生. 学习控制的现状与展望. 自动化学报, 2005, 31(6): 943−955Xu Jian-Xin, Hou Zhong-Sheng. On learning control: The state of the art and perspective. Acta Automatica Sinica, 2005, 31(6): 943−955 [2] 王鼎, 李鑫. 迁移增量启发式动态规划及污水处理应用. 北京工业大学学报, 2025, 51(3): 277−283 doi: 10.11936/bjutxb2023080013Wang Ding, Li Xin. Transferable incremental heuristic dynamic programming with wastewater treatment applications. Journal of Beijing University of Technology, 2025, 51(3): 277−283 doi: 10.11936/bjutxb2023080013 [3] Chen Y, Huang D Q, Li Y N, Feng X Y. A novel iterative learning approach for tracking control of high-speed trains subject to unknown time-varying delay. IEEE Transactions on Automation Science and Engineering, 2022, 19(1): 113−121 doi: 10.1109/TASE.2020.3041952 [4] Shi H H, Xie S Z, Chen Q, Hu S Y, Yi S L. Adaptive tunable predefined-time backstepping control for uncertain robotic manipulators. ICCK Transactions on Sensing, Communication, and Control, 2024, 1(2): 126−135 doi: 10.62762/tscc.2024.672831 [5] 郑鑫鑫, 张大海, 曹荣敏, 侯忠生. 改进无模型自适应迭代学习的直线电机滑模控制. 电机与控制学报, 2024, 28(7): 120−130 doi: 10.15938/j.emc.2024.07.012Zheng Xin-Xin, Zhang Da-Hai, Cao Rong-Min, Hou Zhong-Sheng. Improved model free adaptive iterative learning control for linear motor sliding mode control. Electric Machines and Control, 2024, 28(7): 120−130 doi: 10.15938/j.emc.2024.07.012 [6] Chen Y, Huang D Q, Qin N, Zhang Y H. Adaptive iterative learning control for a class of nonlinear strict-feedback systems with unknown state delays. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(9): 6416−6427 doi: 10.1109/TNNLS.2021.3136644 [7] Ding S H, Mei K Q, Yu X H. Adaptive second-order sliding mode control: A Lyapunov approach. IEEE Transactions on Automatic Control, 2022, 67(10): 5392−5399 doi: 10.1109/TAC.2021.3115447 [8] Liu T J, Shen D, Wang J R. Adaptive quantized iterative learning control using encoding-decoding strategy. IEEE Transactions on Cybernetics, 2025, 55(3): 1359−1371 doi: 10.1109/TCYB.2024.3524240 [9] Yu Q X, Hou Z S, Xu J X. D-type ILC based dynamic modeling and norm optimal ILC for high-speed trains. IEEE Transactions on Control Systems Technology, 2018, 26(2): 652−663 doi: 10.1109/TCST.2017.2692730 [10] 朱胜, 孙明轩, 何熊熊. 严格反馈非线性时变系统的迭代学习控制. 自动化学报, 2010, 36(3): 454−458 doi: 10.3724/SP.J.1004.2010.00454Zhu Sheng, Sun Ming-Xuan, He Xiong-Xiong. Iterative learning control of strict-feedback nonlinear time-varying systems. Acta Automatica Sinica, 2010, 36(3): 454−458 doi: 10.3724/SP.J.1004.2010.00454 [11] 王鼎, 范文倩, 刘奥. 未知不匹配互联系统的非对称输入约束分散控制器设计. 工程科学学报, 2024, 46(12): 2269−2278Wang Ding, Fan Wen-Qian, Liu-Ao. Decentralized controller design with asymmetric input constraints for unknown unmatched interconnected systems. Chinese Journal of Engineering, 2024, 46(12): 2269−2278 [12] Xu J X, Tan Y. A composite energy function-based learning control approach for nonlinear systems with time-varying parametric uncertainties. IEEE Transactions on Automatic Control, 2002, 47(11): 1940−1945 doi: 10.1109/TAC.2002.804460 [13] Chi R H, Wang D W, Hou Z S, Jin S T. Data-driven optimal terminal iterative learning control. Journal of Process Control, 2012, 22(10): 2026−2037 doi: 10.1016/j.jprocont.2012.08.001 [14] 李雪芳, 李晓东, 刘万泉. 自适应迭代学习控制的发展现状与展望. 控制理论与应用, 2024, 41(9): 1523−1538 doi: 10.7641/CTA.2023.30271Li Xue-Fang, Li Xiao-Dong, Liu Wan-Quan. On adaptive iterative learning control: The state of the art and perspective. Control Theory & Applications, 2024, 41(9): 1523−1538 doi: 10.7641/CTA.2023.30271 [15] Xu J X, Yan R. On initial conditions in iterative learning control. IEEE Transactions on Automatic Control, 2005, 50(9): 1349−1354 doi: 10.1109/TAC.2005.854613 [16] 施卉辉, 陈强. 一类不确定系统的自适应滑模迭代学习控制. 控制理论与应用, 2023, 40(7): 1162−1171Shi Hui-Hui, Chen Qiang. Adaptive sliding-mode iterative learning control for a class of uncertain systems. Control Theory & Applications, 2023, 40(7): 1162−1171 [17] Jin X. Nonrepetitive leader-follower formation tracking for multiagent systems with LOS range and angle constraints using iterative learning control. IEEE Transactions on Cybernetics, 2019, 49(5): 1748−1758 doi: 10.1109/tcyb.2018.2817610 [18] 孙明轩, 严求真. 迭代学习控制系统的误差跟踪设计方法. 自动化学报, 2013, 39(3): 251−262 doi: 10.1016/S1874-1029(13)60027-0Sun Ming-Xuan, Yan Qiu-Zhen. Error tracking of iterative learning control systems. Acta Automatica Sinica, 2013, 39(3): 251−262 doi: 10.1016/S1874-1029(13)60027-0 [19] 陈强, 陈凯杰, 施卉辉, 孙明轩. 机械臂变长度误差跟踪迭代学习控制. 自动化学报, 2023, 49(12): 2594−2604Chen Qiang, Chen Kai-Jie, Shi Hui-Hui, Sun Ming-Xuan. Error-tracking iterative learning control for robot manipulators with iteration varying lengths. Acta Automatica Sinica, 2023, 49(12): 2594−2604 [20] Shi H H, Chen Q, Hong Y H, Ou X H, He X X. Adaptive fuzzy iterative learning control of constrained systems with arbitrary initial state errors and unknown control gain. IEEE Transactions on Automation Science and Engineering, 2025, 22: 6439−6450 doi: 10.1109/TASE.2024.3445670 [21] Sun M X, Wu T, Chen L J, Zhang G F. Neural AILC for error tracking against arbitrary initial shifts. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(7): 2705−2716 doi: 10.1109/TNNLS.2017.2698507 [22] Xiong W J, Xu L, Huang T W, Yu X H, Liu Y H. Finite-iteration tracking of singular coupled systems based on learning control with packet losses. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(1): 245−255 doi: 10.1109/TSMC.2017.2770160 [23] Luo Z J, Xiong W J, Huang C. Finite-iteration learning tracking of multi-agent systems via the distributed optimization method. Neurocomputing, 2022, 483: 423−431 doi: 10.1016/j.neucom.2021.08.140 [24] 余琼霞, 候怡腾, 孙俊杰, 侯忠生. 高速列车受限自适应有限次迭代学习容错控制. 交通运输系统工程与信息, 2024, 24(3): 140−150 doi: 10.16097/j.cnki.1009-6744.2024.03.014Yu Qiong-Xia, Hou Yi-Teng, Sun Jun-Jie, Hou Zhong-Sheng. Constrained adaptive finite-iteration learning fault-tolerant control for high-speed train. Journal of Transportation Systems Engineering and Information Technology, 2024, 24(3): 140−150 doi: 10.16097/j.cnki.1009-6744.2024.03.014 [25] Yang R N, Gong Y J, Liu G P. Robust finite-iteration tracking of discrete-time systems in repetitive process setting via ILC scheme. International Journal of Robust and Nonlinear Control, 2022, 32(5): 2585−2602 [26] Li Y J, Ou X H, Chen P, He X X, Jiang Q R. Data-driven control with prescribed-time convergence for discrete-time nonlinear systems. IEEE Transactions on Automation Science and Engineering, 2025, 22: 4961−4971 doi: 10.1109/TASE.2024.3413991 [27] Cheng Y, Chen Q, Hu S Y, Ren X M, Yang M Y, He X X. Error-based model-free adaptive performance tuning control with disturbance rejection for discrete-time nonlinear systems. IEEE Transactions on Industrial Electronics, DOI: 10.1109/TIE.2025.3572983 [28] Sun M X, Wu L W. Ideal error dynamics based design of discrete-time repetitive controllers. In: Proceedings of the 24th Chinese Control and Decision Conference. Taiyuan, China: IEEE, 2012. 1734−1739 [29] 孙明轩, 胡志云, 李威, 李鹤. 采用干扰差分补偿的无切换吸引离散时间控制方法. 控制与决策, 2020, 35(6): 1512−1518Sun Ming-Xuan, Hu Zhi-Yun, Li Wei, Li He. Non-switching-attracting discrete-time control method by usingdisturbance difference compensation. Control and Decision, 2020, 35(6): 1512−1518 [30] 陈强, 叶艳, 胡轶, 孙明轩. 一种两相幂次吸引律离散时间控制方法. 控制与决策, 2022, 37(2): 424−430Chen Qiang, Ye Yan, Hu Yi, Sun Ming-Xuan. A two-phase power attracting law based discrete-time control. Control and Decision, 2022, 37(2): 424−430 -

 下载:
下载:

计量
- 文章访问数: 278
- HTML全文浏览量: 102
- PDF下载量: 64
- 被引次数: 0
