

Unmanned System Asynchronous Task Planning Based on Partially Observable Monte Carlo Tree Search Algorithm
-
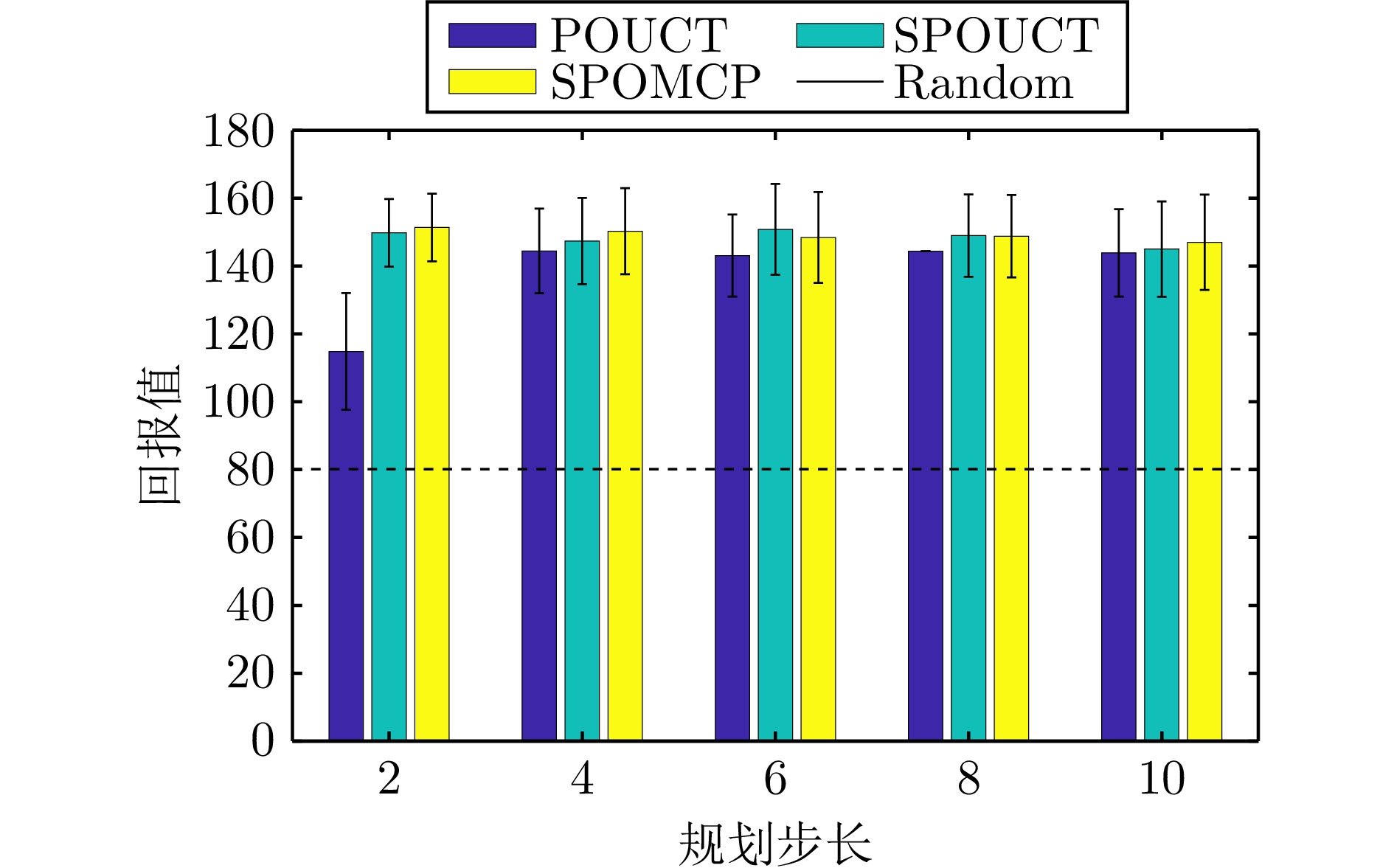
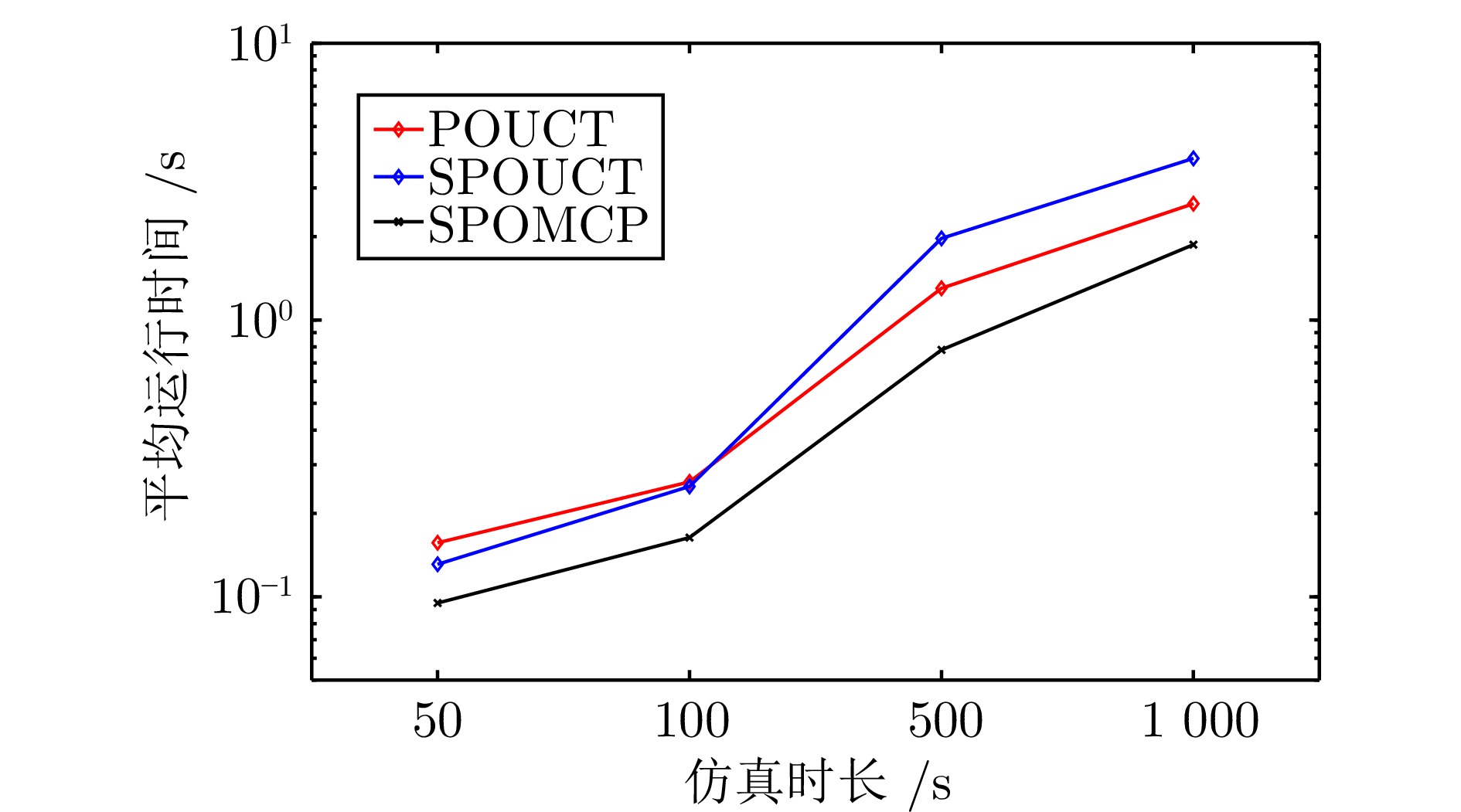
摘要: 无人系统正深刻重塑社会生活方式与战争形态. 围绕无人系统动态规划领域, 首先, 将环境抽象为由节点和边组成的拓扑网络. 其次, 针对异步规划中变步长时间推进的问题, 提出一种新颖的异步规划算法, 即半马尔科夫环境下的部分可观蒙特卡洛树搜索算法(SPOMCP), 其创新之处在于将拓扑网络转化为具有最简信息表示的子目标图, 并实现基于变步长时间推进机制的策略快速寻优. 通过理论分析, 证明了SPOMCP能够生成最优策略, 且计算复杂度与子目标节点数呈指数相关. 最后, 仿真实验表明了SPOMCP的性能高于基准算法, 用不到基准算法89.18%的计算时间, 得到高于基准算法的平均回报值.Abstract: Unmanned systems are profoundly reshaping social lifestyles and modes of warfare. In the field of dynamic planning for unmanned systems, the environment is first abstracted as a topological network composed of nodes and edges. Second, for the variable step time advancement problem of asynchronous planning, a novel asynchronous planning algorithm, namely, a partially observable Monte Carlo tree search algorithm in the semi-Markov environment (SPOMCP) is proposed. The innovation is that the topological network is transformed into a sub-goal graph with the simplest information representation, and enabling rapid policy optimization based on a variable step time advancement mechanism. Through theoretical analysis, it is proven that SPOMCP can generate the optimal strategies, and the computational complexity is exponentially correlated with the number of sub-goal nodes. Finally, simulation experiments demonstrate that SPOMCP outperforms the benchmark algorithm in terms of performance, with less than 89.18% of the benchmark algorithm's computation time, resulting in higher average rewards.
-

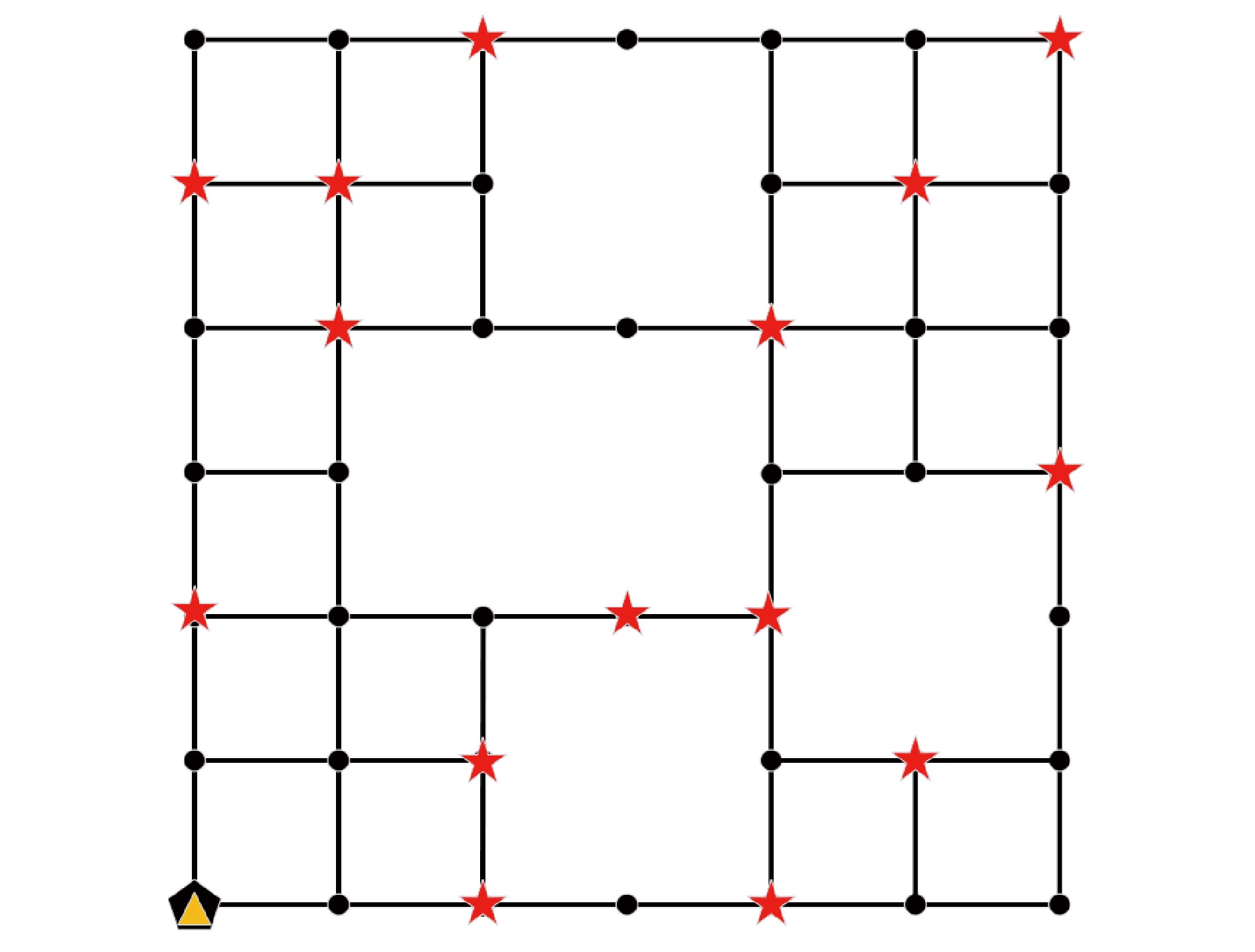
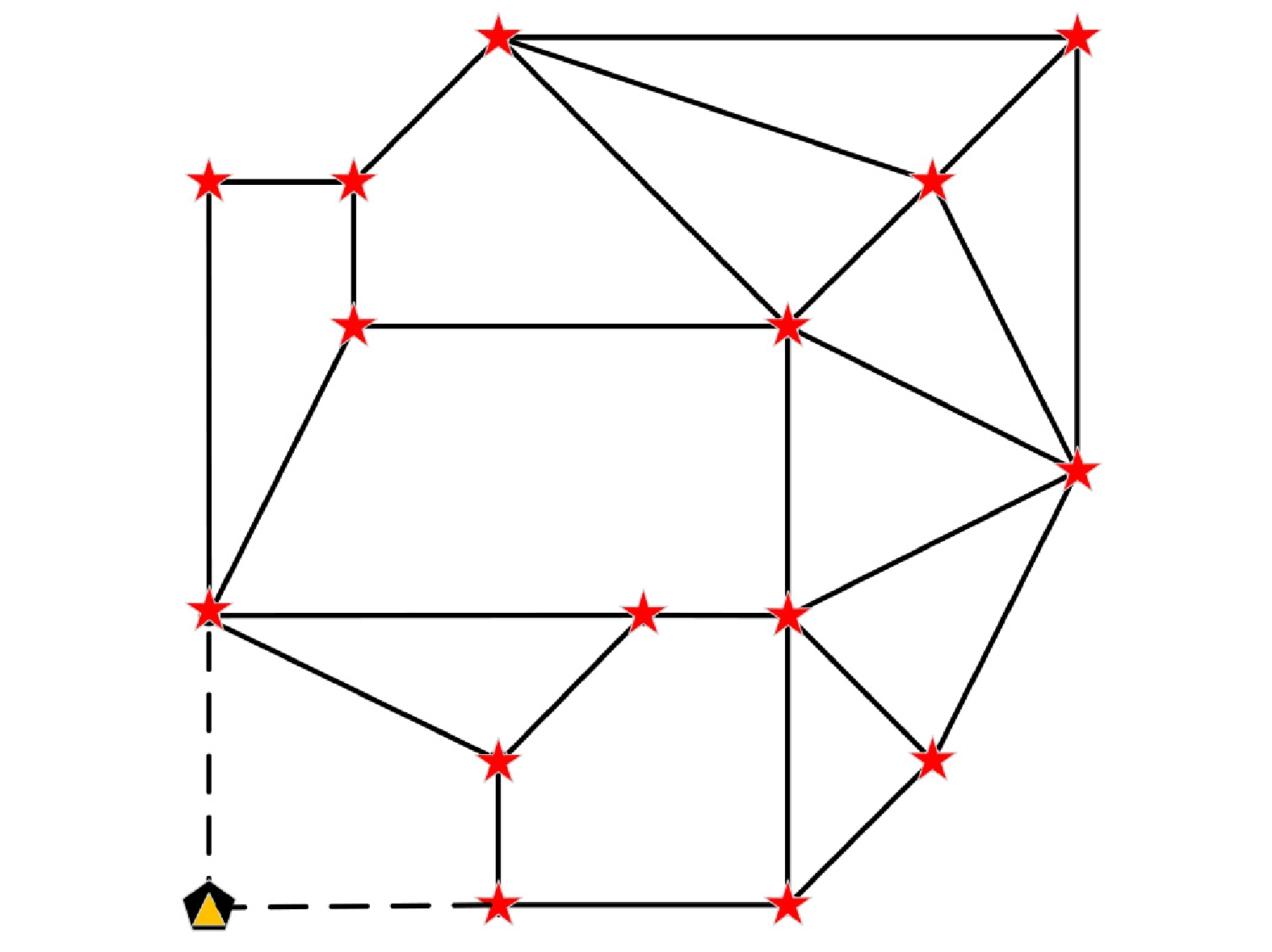
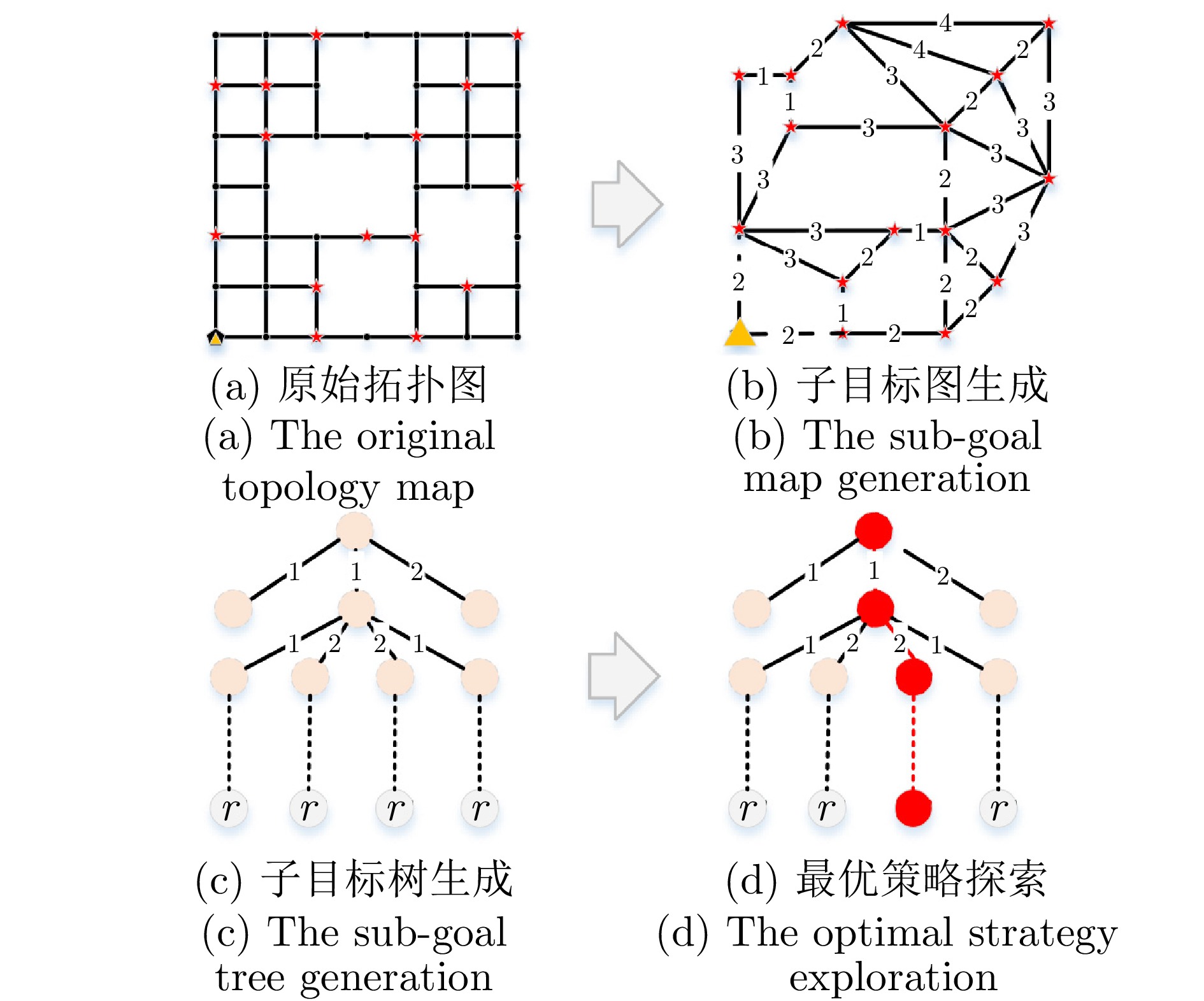
图 2 等步长/变步长时间推进机制示意图
Fig. 2 Schematic diagram of fixed step/variable step time advancement mechanism
-
[1] 杨松, 王涛, 李小波, 何华, 孙吉东. 异构无人集群杀伤网任务路径生成建模与评估. 系统工程与电子技术, 2025, 47(10): 3278−3287 doi: 10.12305/j.issn.1001-506X.2025.10.15Yang Song, Wang Tao, Li Xiao-Bo, He Hua, Sun Ji-Dong. Modelingeneous unmanned swarm kill-web. Systems Engineering and Electronics, 2025, 47(10): 3278−3287 doi: 10.12305/j.issn.1001-506X.2025.10.15 [2] 孙鹏耀. 面向体系破击行动的无人机集群任务规划研究 [博士学位论文], 南京理工大学, 中国, 2024.Sun Peng-Yao. Mission Planning of UAV Swarm Oriented to Combat System Paralysis Action [Ph.D. dissertation], Nanjing University of Science and Technology, China, 2024. [3] 袁媛, 孙柏, 刘赶超. 景象匹配无人机视觉定位. 自动化学报, 2025, 51(2): 287−311 doi: 10.16383/j.aas.c230778Yuan Yuan, Sun Bo, Liu Gan-Chao. Drone-based scene matching visual geo-localization. Acta Automatica Sinica, 2025, 51(2): 287−311 doi: 10.16383/j.aas.c230778 [4] 罗彪, 胡天萌, 周育豪. 多智能体强化学习控制与决策研究综述. 自动化学报, 2025, 51(3): 510−539 doi: 10.16383/j.aas.c240392Luo Biao, Hu Tian-Meng, Zhou Yu-Hao. Survey on multi-agent reinforcement learning for control and decision-making. Acta Automatica Sinica, 2025, 51(3): 510−539 doi: 10.16383/j.aas.c240392 [5] 王冰洁, 徐磊, 林宗利, 施阳, 杨涛. 基于自适应动态规划的量化通信下协同最优输出调节. 自动化学报, 2025, 51(4): 813−823 doi: 10.16383/j.aas.c240494Wang Bing-Jie, Xu Lei, Lin Zong-Li, Shi Yang, Yang Tao. Cooperative optimal output regulation under quantized communication based on adaptive dynamic programming. Acta Automatica Sinica, 2025, 51(4): 813−823 doi: 10.16383/j.aas.c240494 [6] Zhou X, Chen Z Y, Huang M G, Zhu Z, Wang T. A collaborative evolution algorithm for unmanned equipment project distributed scheduling optimization with grouping and due window constraints. Expert Systems With Applications, 2026, 296(D): Article No. 129143 [7] Ivan M, Jesus C, Luis M. Multi-UAV cooperation. Encyclopedia of Aerospace Engineering, DOI: 10.1002/9780470686652.eae1130 [8] Zhao Y, Wang X, Wang C, Cong Y, Shen L. Systemic design of distributed multi-UAV cooperative decision-making for multi-target tracking. Autonomous Agents and Multi-agent Systems, 2019, 33(1−2): 1−27 doi: 10.1007/s10458-018-9397-9 [9] Messias J. Decision-making Under Uncertainty for Real Robot Teams [Ph.D. dissertation], Institute for Systems and Robotics, Instituto Superior Técnico, Portugal, 2014. [10] Chen S, Wu F, Shen L, Chen J, Ramchurn S. Multi-agent patrolling under uncertainty and threats. PLOS One, 2015, 10(6): Article No. e0130154 doi: 10.1371/journal.pone.0130154 [11] Nguyen T T, Ngoc D N, Saeid N. Deep reinforcement learning for multiagent systems: A review of challenges, solutions, and applications. IEEE Transactions on Cybernetics, 2020, 50(9): 3826−3839 doi: 10.1109/TCYB.2020.2977374 [12] Jia X N, Hou H X, Wu N E, Li H R, Chang X. Low-resource machine translation based on asynchronous dynamic programming. In: Proceedings of the 20th Chinese National Conference on Computational Linguistics. Virtual Event: CIPS, 2021. 886−894 [13] Zhou X, Ling G D, Yu J Y, Zhou T, Wang R. Balanced multi-objective evolution algorithm for unmanned systems project scheduling with preventive maintenance and order grouping constraints. Expert Systems With Applications, 2026, 299(A): Article No. 130006 [14] Ming F, Gong W, Wang L, Jin Y. Constrained multi-objective optimization with deep reinforcement learning assisted operator selection. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 919−931 doi: 10.1109/JAS.2023.123687 [15] Ming F, Gong W, Wang L. Even search in a promising region for constrained multi-objective optimization. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 474−486 doi: 10.1109/JAS.2023.123792 [16] Silver D, Veness J. Monte-Carlo planning in large POMDPs. In: Proceedings of the 24th International Conference on Neural Information Processing Systems. Vancouver, CA, Canada: Curran Associates Inc., 2010. [17] Amato C, Oliehoek F A. Scalable planning and learning for multiagent POMDPs. In: Proceedings of the 29th AAAI Conference on Artificial Intelligence. Austin, Texas, USA: AAAI Press, 2015. 1995−2002 [18] Pfrommer J. Graphical partially observable Monte-Carlo planning. In: Proceedings of the 30th International Conference on Neural Information Processing Systems. Barcelona, Spain: Curran Associates Inc., 2016. [19] Fischer J, Tas Ö S. Information particle filter tree: An online algorithm for POMDPs with belief-based rewards on continuous domains. In: Proceedings of the 37th International Conference on Machine Learning. Virtual Event: PMLR, 2020. 3177−3187 [20] 满景涛, 曾志刚, 盛银, 来金钢. 基于ODE-PDE的大规模多智能体系统有限时间编队. 自动化学报, 2025, 51(3): 631−642 doi: 10.16383/j.aas.c240426Man Jing-Tao, Zeng Zhi-Gang, Sheng Yin, Lai Jin-Gang. Finite-time formation of large-scale multi-agent systems based on an ODE-PDE approach. Acta Automatica Sinica, 2025, 51(3): 631−642 doi: 10.16383/j.aas.c240426 [21] Guo C, Liang Z. Predictive inspection and maintenance optimization for partially observable semi-Markov deteriorating systems. IEEE Transactions on Automation Science and Engineering, 2025, 22(1): 10893−10904 [22] Wang W Z, Mao L, Wang R Q, Min B C. Multi-robot cooperative socially-aware navigation using multi-agent reinforcement learning. In: Proceedings of the 2024 IEEE International Conference on Robotics and Automation. Nishi-ku, Yokohama, Japan: Institute of Electrical and Electronics Engineers Inc, 2024. 12353−12360 [23] Wang T, Zhu Z, Zhou X, Jing T, Chen W. A function-based behavioral modeling method for air combat simulation. Journal of Systems Engineering and Electronics, 2024, 35(4): 945−954 doi: 10.23919/JSEE.2024.000068 [24] 陈人龙, 陈嘉礼, 李善琦, 谭营. 多智能体强化学习方法综述. 信息对抗技术, 2024, 3(1): 18−32Chen Ren-Long, Chen Jia-Li, Li Shan-Qi, Tan Ying. A survey of multi-agent reinforcement learning methods. Information Coun-ter Measure Technology, 2024, 3(1): 18−32 [25] He W, Xu W, Ge X, Han Q, Du W, Qian F. Secure control of multiagent systems against malicious attacks: A brief survey. IEEE Transactions on Industrial Informatics, 2021, 18(6): 3595−3608 [26] Zhou X, Jing T, Wang T, Huang Z J, Wu D. A human-supported robot swarm information gathering task planning method. Journal of Systems Engineering and Electronics, 2023: 1−8 [27] Lev-Yehudi I, Barenboim M, Indelman V. Simplifying complex observation models in continuous POMDP planning with probabilistic guarantees and practice. In: Proceedings of the 38th AAAI Conference on Artificial Intelligence. Vancouver, BC, Canada: AAAI Press, 2024. 20176−20184 [28] Zhang M, Revie M. Continuous-observation partially observable semi-Markov decision processes for machine maintenance. IEEE Transactions on Reliability, 2016, 66(1): 202−218 [29] Yu H. Approximate Solution Methods for Partially Observable Markov and Semi-Markov Decision Processes [Ph.D. dissertation],Massachusetts Institute of Technology, United States, 2006. [30] Xing Y, Zhang G, Li J. Adaptive fuzzy quantized control for a cooperative USV-UAV system based on asynchronous separate guidance. Journal of Marine Science and Engineering, 2023, 11(12): Article No. 2331 doi: 10.3390/jmse11122331 [31] Seiler K M, Kong F H, Fitch R. Multi-horizon multi-agent planning using decentralised Monte Carlo tree search. IEEE Robotics and Automation Letters, 2024, 9(9): 7715−7722 doi: 10.1109/LRA.2024.3426273 [32] Skrynnik A, Andreychuk A, Yakovlev K, Panov A. Decentralized Monte Carlo tree search for partially observable multi-agent pathfinding. In: Proceedings of the 38th AAAI Conference on Artificial Intelligence. Vancouver, BC, Canada: AAAI Press, 2024, 38(16): 17531−17540 [33] 李晓辉, 苏家楠, 吕思婷, 张鹏. 基于SMDP模型的车路协同任务智能卸载算法. 北京邮电大学学报, 2023, 46(2): 15−21 doi: 10.13190/j.jbupt.2022-066Li Xiao-Hui, Su Jia-Nan, Lyu Si-Ting, Zhang Peng. Intelligent offloading algorithm for road collaborative tasks based on SMDP model. Journal of Beijing University of Posts and Telecommunications, 2023, 46(2): 15−21 doi: 10.13190/j.jbupt.2022-066 -

 下载:
下载:

图(11)
计量
- 文章访问数: 614
- HTML全文浏览量: 613
- PDF下载量: 160
- 被引次数: 0
