

Survey on the Integrated Communication, Control, and Computation Systems for Clustered Robotic Operations
-
摘要: 在集群机器人系统中, 通信、控制与计算模块的协同设计已成为提升系统整体性能的关键, 对推动离散制造自动化向智能化、集成化方向发展具有重要促进作用. 首先, 从集群机器人“通−控−算”联合系统架构出发, 通过梳理国内外在“通−控”、“通−算”、“控−算”融合技术方面的研究现状, 揭示子系统之间的耦合关系, 强调“通−控−算”联合设计对提升集群机器人整体作业性能的重要性. 接着, 以集群机器人系统在“通−控−算”软件仿真、硬件在环仿真及实物测试验证平台为例, 总结具体实施中的关键技术. 最后, 对集群机器人“通−控−算”系统联合设计的未来研究方向进行总结与展望.
-
关键词:
- 集群机器人 /
- 通信−控制−计算融合 /
- 工业网络系统 /
- 联合设计 /
- 工业物联网
Abstract: The co-design of communication, control, and computing modules in clustered robotic systems has emerged as a critical enabler for enhancing overall system performance, playing a significant role in advancing discrete manufacturing automation toward intelligent and integrated development. Firstly, this paper starts with the architecture of the “communication-control-computation” integrated system for clustered robots. By reviewing the current research on the fusion technologies of “communication-control”, “communication-computation”, and “control-computation” both domestically and internationally, the coupling relationships between subsystems are revealed, highlighting the importance of “communication-control-computation” co-design in improving the overall operational performance of clustered robots. Next, it summarizes key technologies in the implementation process through examples of software simulations, hardware-in-the-loop simulations, and physical verification platform for the “communication-control-computation” system in clustered robots. Finally, it concludes with a summary and outlook on future research directions for the co-design of the “communication-control-computation” system in clustered robots. -
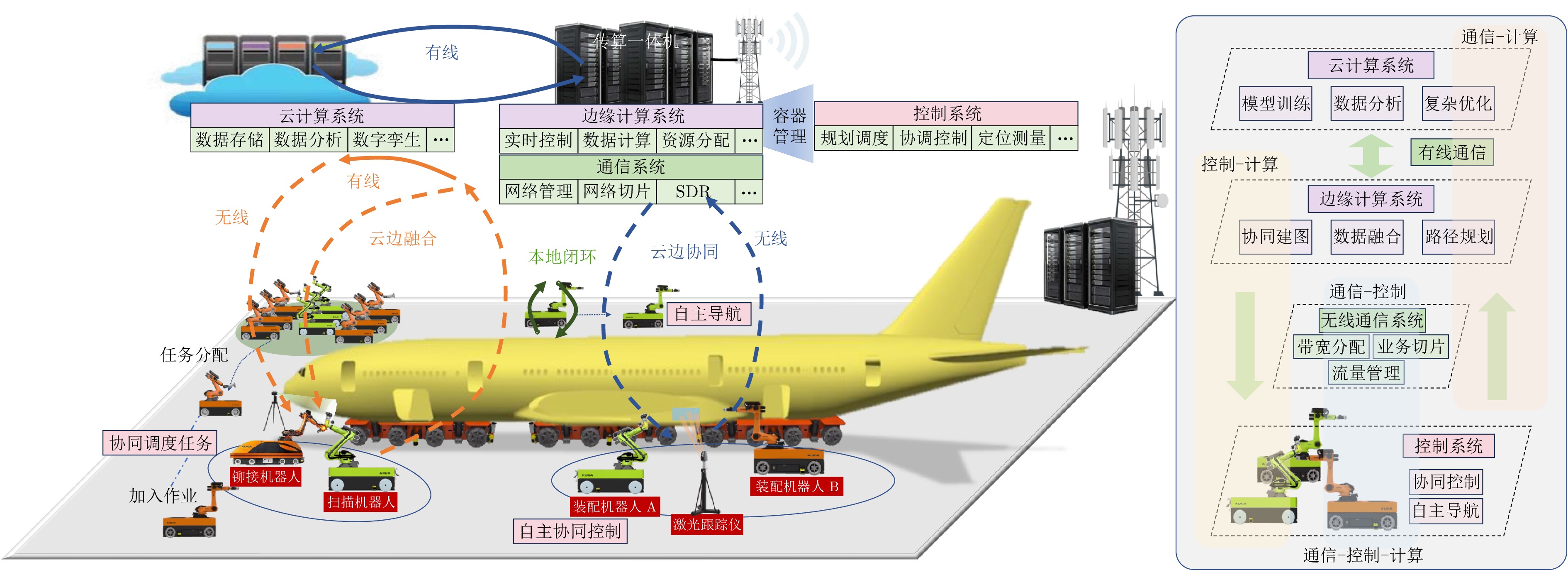
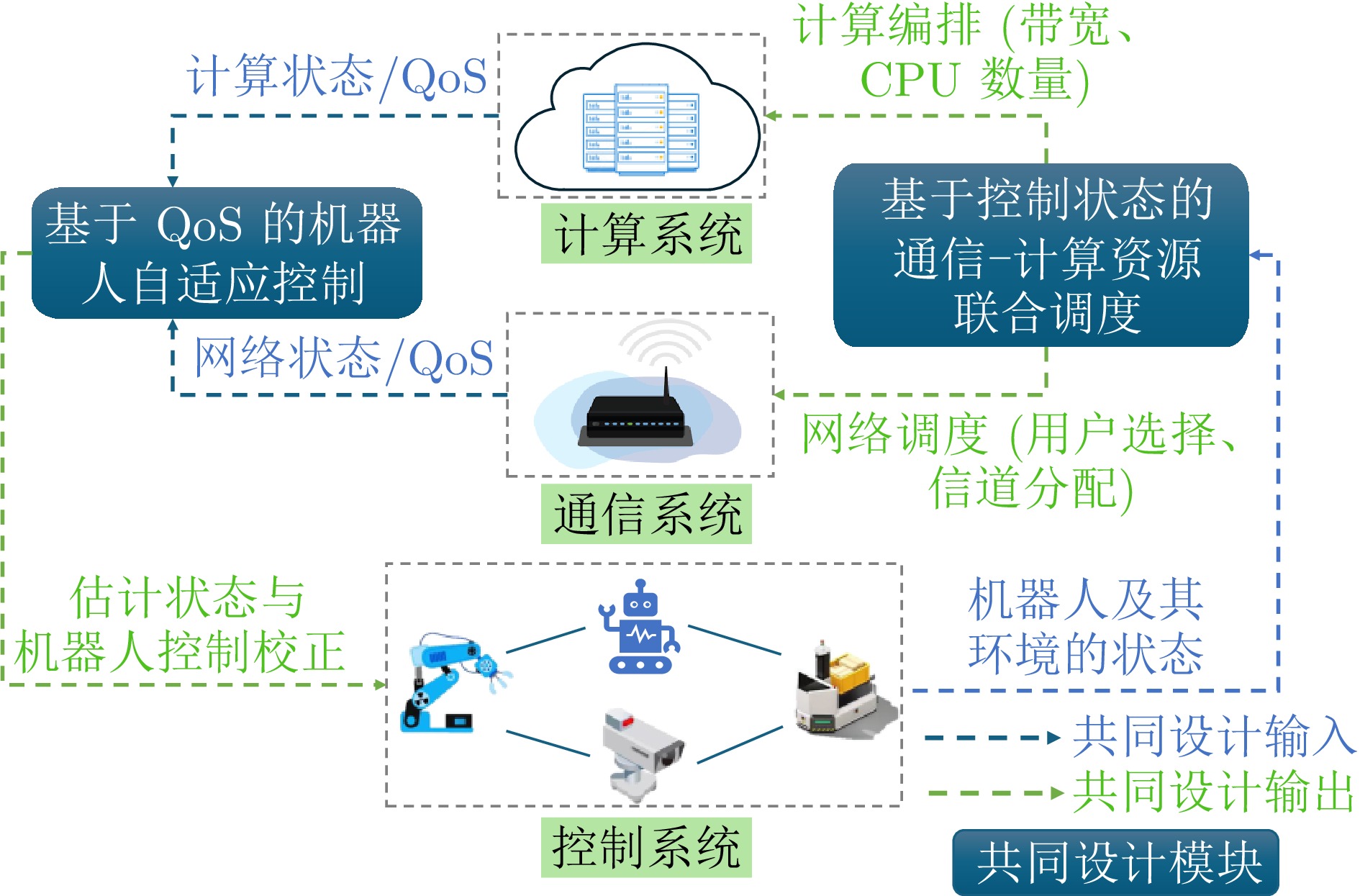
图 1 集群机器人作业系统的三大核心子系统: 通信、控制与计算
Fig. 1 The three core subsystems of the clustered robotic operation system: Communication, control, and computing
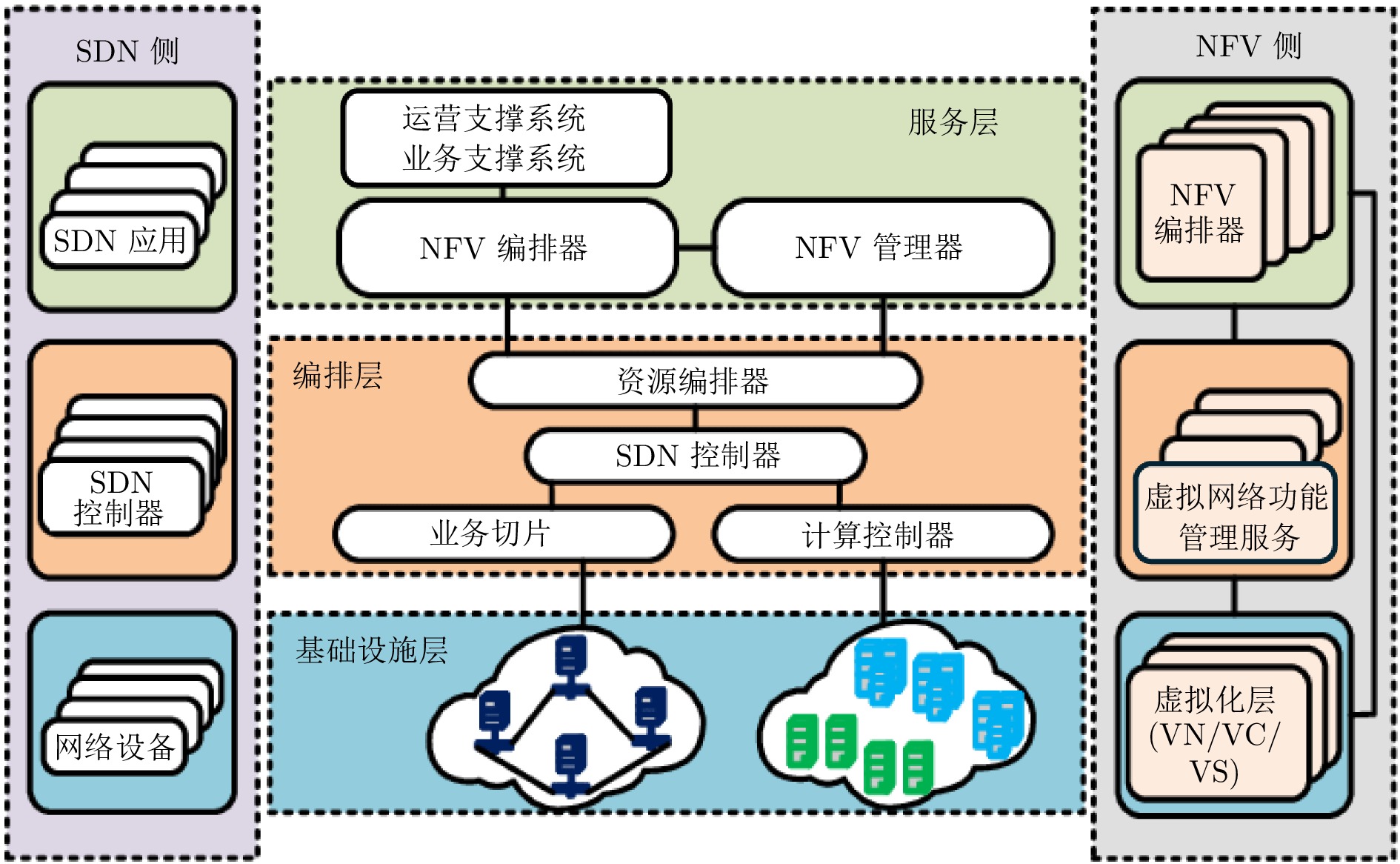
图 2 工业无线通信系统的SDN/NFV架构
Fig. 2 SDN/NFV-based architecture for industrial wireless communication system
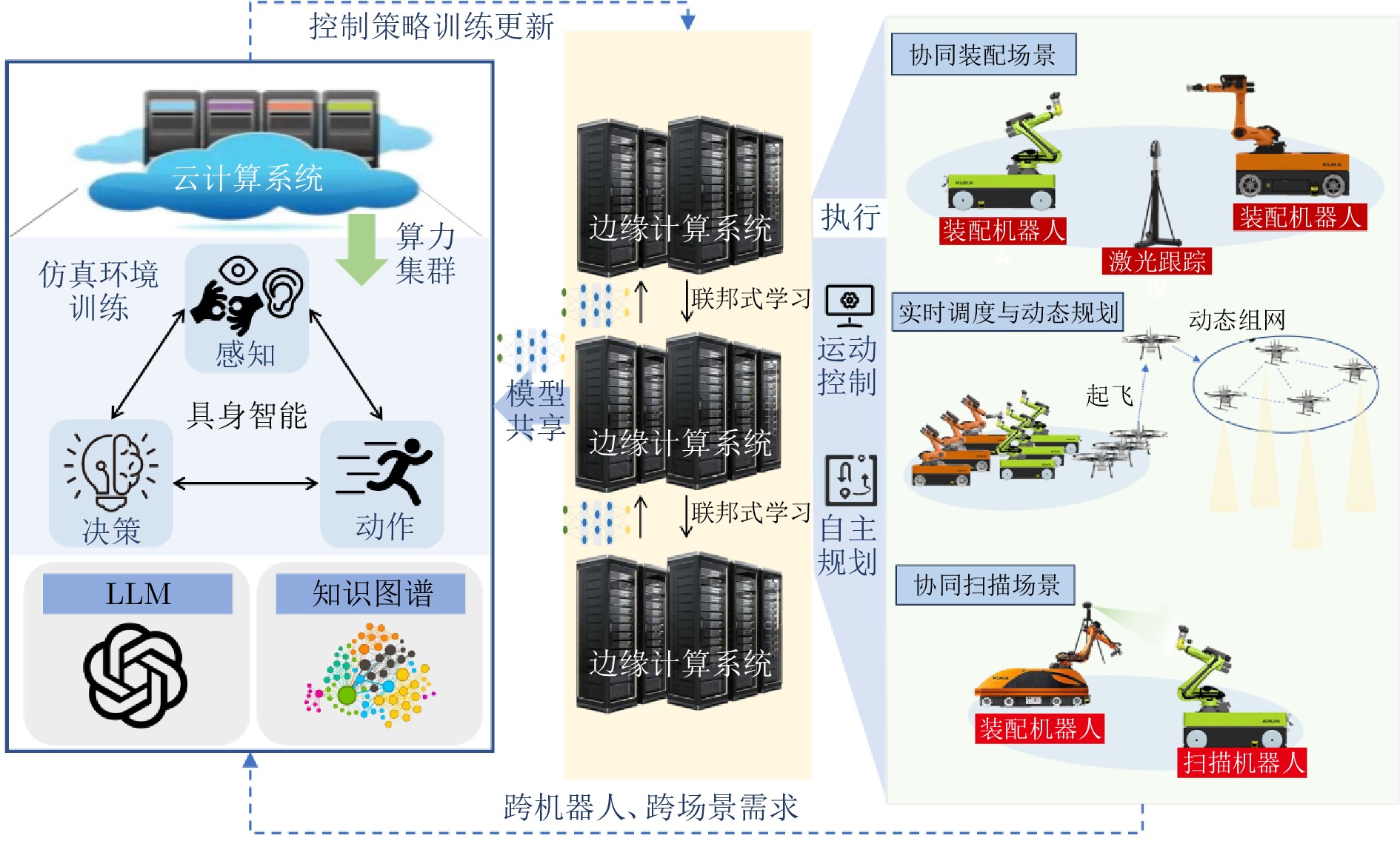
图 4 具身智能与大模型的云−边−端协同架构
Fig. 4 Cloud–edge–end architecture for embodied intelligence with large models
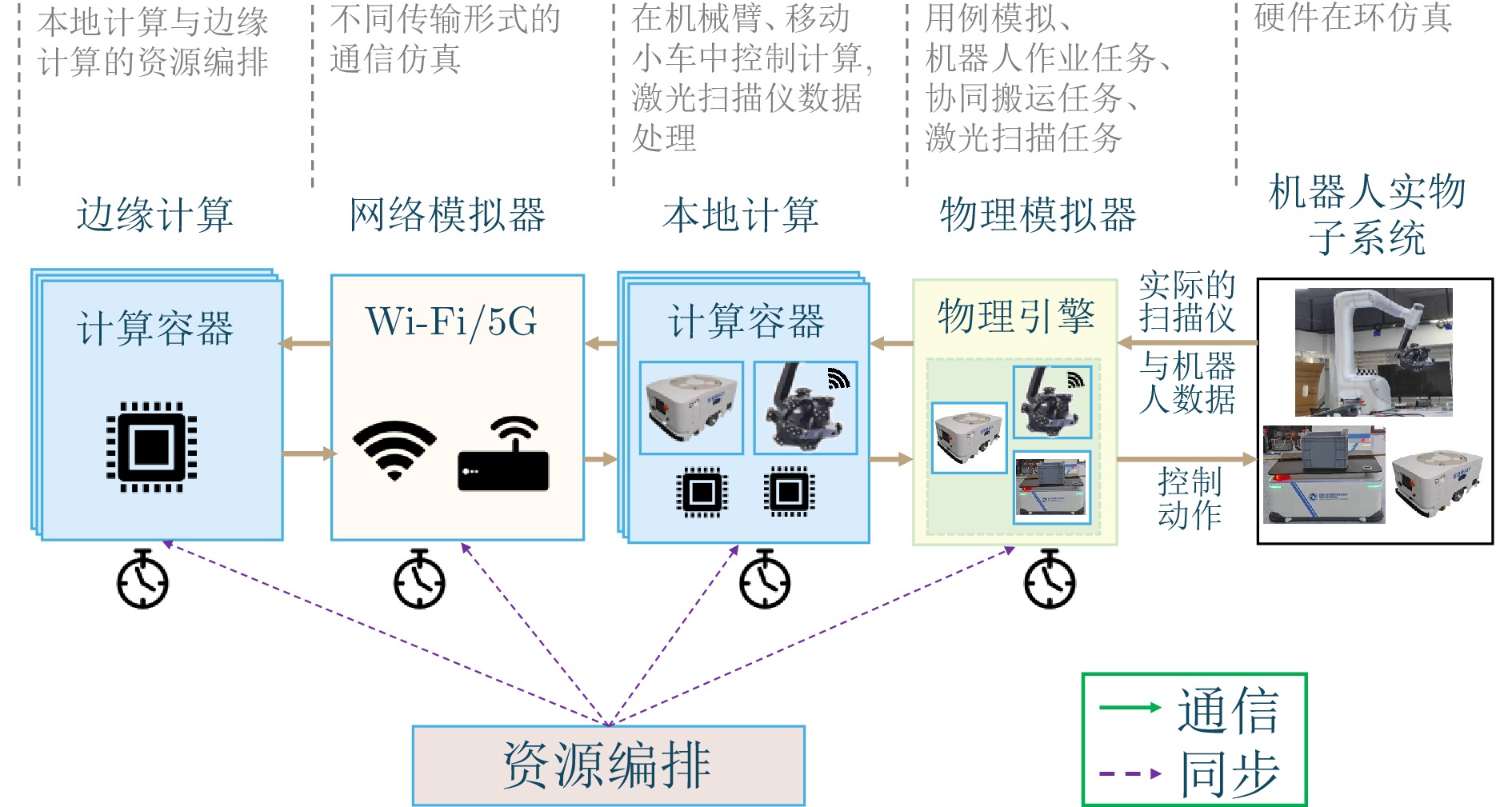
图 6 通信−控制−计算仿真软件搭建流程
Fig. 6 Construction process of communication-control-computing simulation software
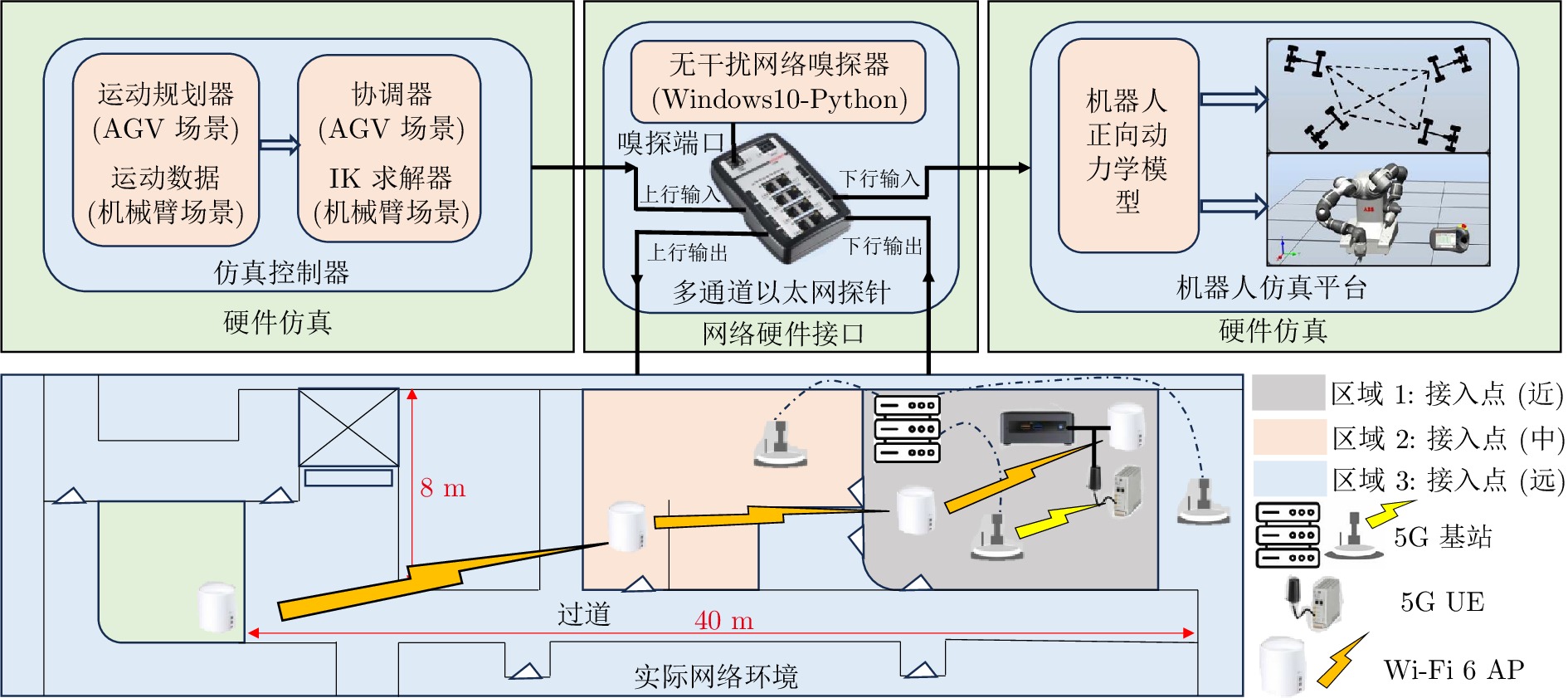
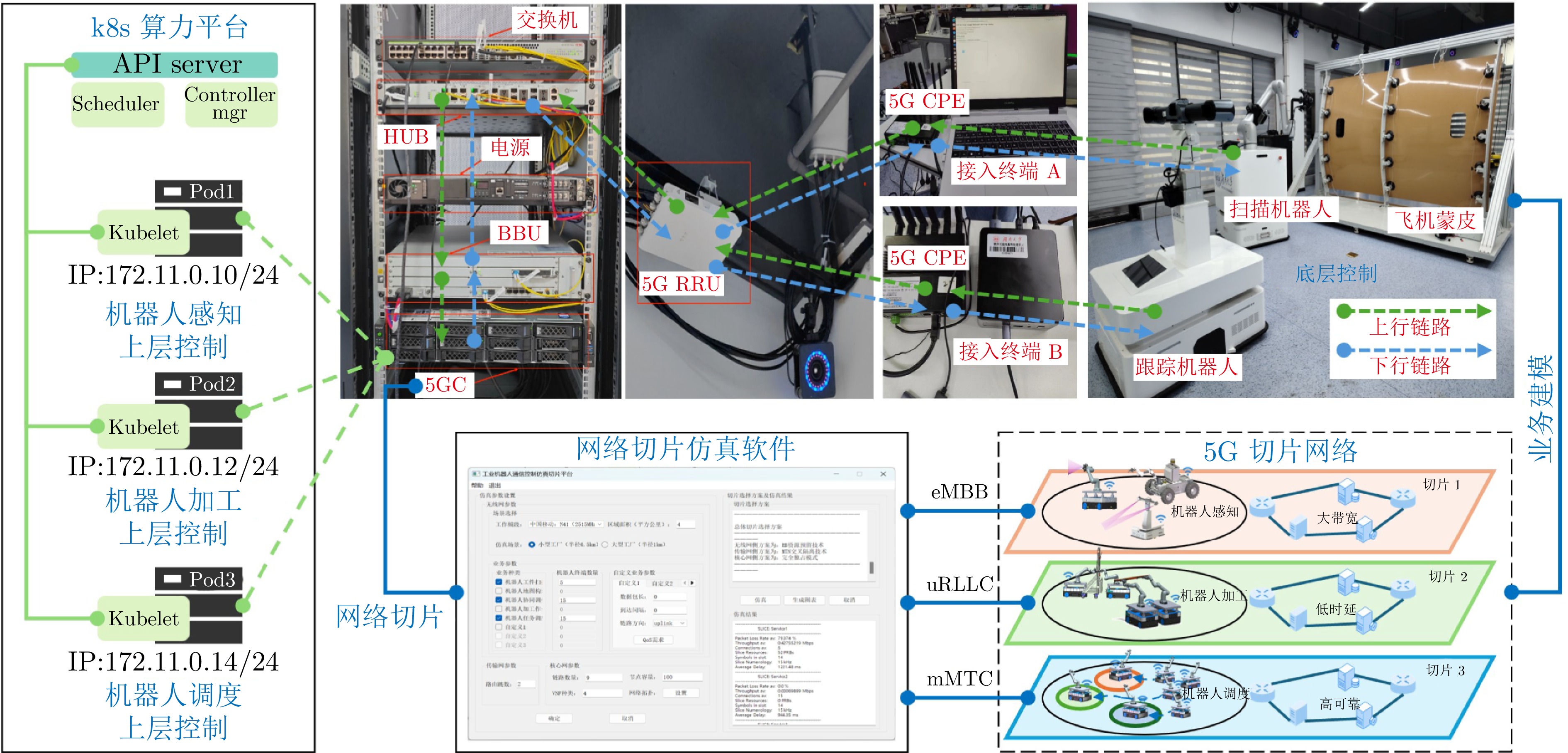
图 8 通信−控制−计算协同设计实例平台
Fig. 8 Example platform for communication-control-computing co-design
表 1 云−边−端计算层级与异构硬件特性对比
Table 1 Comparison of cloud–edge–end computing layers and heterogeneous hardware characteristics
层级/硬件 典型算力水平 时延特性 功耗与成本 适用任务类型 端侧(ASIC/SoC) 低$ \sim $中(实时处理优化) 确定性时延 功耗最低, 成本低 本地控制、数据预处理、动作响应 边缘(CPU/GPU/FPGA) 中$ \sim $高(并行推理) 毫秒级低时延(小于10 ms) 中等功耗, 中等成本 SLAM、多传感器融合、局部规划 云端(集群GPU/CPU) 最高(大规模并行) 跨网高时延(大于30 ms) 功耗最高, 成本高 全局规划、模型训练、工艺分析  下载: 导出CSV
下载: 导出CSV
表 2 通信−控制耦合参数及其对系统性能的影响
Table 2 Communication–control coupling parameters and their impacts
耦合参数 对通信的影响 对控制系统的影响 文献 信道质量 影响误码率, 吞吐下降 反馈噪声增加, 影响准确性与稳定性 [25, 28] 移动速度 信道时变性增强, 质量波动 增大控制误差, 影响稳定性和可用控制增益 [25, 31] 采样周期 高频采样增加通信负载, 易引发拥塞 高频采样易引发不稳定 [32−34] 控制增益 高增益对链路可靠性要求更高 高增益更易受时延/丢包影响, 降低稳定性 [35−36] 通信时延 增加传输等待时间, 降低链路有效性 降低响应速度与准确性, 增大不稳定概率 [37−38] 时延抖动 链路不确定性上升 引起控制抖动、降低控制鲁棒性与稳定性 [39−40] 丢包率 可靠性下降, 数据难以稳定到达 准确性下降, 连续丢包可能导致系统失稳 [41] 通信带宽 限制数据速率, 影响可靠性 限制采样频率与控制刷新率, 影响响应速度与精度 [42] 信息新鲜度 反映链路更新是否及时 AoI高导致状态反馈过时, 影响响应速度 [43−44]
下载: 导出CSV
表 3 通信−控制−计算协同设计目标和约束
Table 3 Communication-control-computing co-design objectives and constraints
通信约束 控制约束 计算约束 设计方法 文献 优化目标 时延 传输功率 传输速率 带宽 丢包率 中断概率 通信成本 稳定性 收敛性 控制成本 CPU 计算卸载 计算成本 通信−控制 [30] 最小化通信能耗 - - - - - - - - - √ - - - [44] 最小化AoI √ √ - - √ - - - √ - - - - [45] 最小化控制成本 √ - - √ √ - - - - - - - - [48] 最小化通信需求 - - - - - - - √ - - - - - [49] 最大化频谱效率 √ √ - √ - √ - - √ - - - - [50] 最小化信噪比 - - - - - - - √ - - - - - [51] 最小化通−控成本 √ - - - √ - - √ - - - - - 通信−计算 [69] 最小化通信能耗 √ √ - - - - - - - - - √ √ [70] 最小化通−算能耗 √ √ - - - - - - - - - √ - [72] 最小化时延 √ √ √ - - - - - - - √ √ √ [73] 最小化时延 √ √ √ √ - - √ - - - - √ √ [78] 最小化AoI √ - - - - - - - - - - √ - 控制−计算 [88] 最小化计算延迟 - - - - - - - √ √ - √ - - [89] 最小化计算复杂度 - - - - - - - √ √ √ √ - - [90] 最小化计算能耗 - - - - - - - √ - √ - - √ 通−控−算 [68] 最小化通−控−算能耗 √ √ - - - - - √ - - √ √ - [69] 最小化控制成本 √ - √ √ √ - √ - √ - √ - - [112] 最小化整体时延 √ - - - √ - - √ √ - √ - - [113] 最大化任务收益 √ - √ √ - - - - √ - √ √ √
下载: 导出CSV
表 4 通信−控制−计算协同验证方法及典型工具对比
Table 4 Comparison of communication–control–computing validation methods and typical tools
验证方式 核心特点 适用研究任务 主要局限性 常用软件/设备 控制: Gazebo, CoppeliaSim 软件仿真 高可控性、建模灵活 架构验证、大规模协同 模型简化, 难反映真实 通信: ns-3, OMNeT++ 计算: EdgeCloudSim, iFogSim 控制: PLC 硬件在环 真实链路/硬件参与 实时策略验证 规模受限 通信: USRP+OAI 计算: 边缘服务器 实物测试 全链路真实; 系统级性能 工业协同作业 成本高、实时调度难 集群机器人、5G、ROS2、边缘节点
下载: 导出CSV
-
[1] Ferranti L, Lyons L, Negenborn R R, Keviczky T, Alonso-Mora J. Distributed nonlinear trajectory optimization for multi-robot motion planning. IEEE Transactions on Control Systems Technology, 2023, 31(2): 809−824 doi: 10.1109/TCST.2022.3211130 [2] Huang L X, Fang Y. An ILC method for wireless remote control systems with communication delays. In: Proceedings of International Conference on Control Engineering and Communication Technology. Shenyang, China: IEEE, 2012. 334-337 [3] Ballotta L, Peserico G, Zanini F, Dini P. To compute or not to compute? adaptive smart sensing in resource-constrained edge computing. IEEE Transactions on Network Science and Engineering, 2024, 11(1): 736−749 doi: 10.1109/TNSE.2023.3306202 [4] Liu L K, Liu S S, Shi W S. 4C: a computation, communication, and control co-design framework for cavs. IEEE Wireless Communications, 2021, 28(4): 42−48 doi: 10.1109/MWC.201.2000512 [5] 关新平, 陈彩莲, 杨博, 华长春, 吕玲, 朱善迎. 工业网络系统的感知-传输-控制一体化: 挑战和进展. 自动化学报, 2019, 45(01): 25−36Guan Xin-Ping, Chen Cai-Lian, Yang Bo, Hua Chang-Chun, Lyu Ling, Zhu Shan-Ying. Towards the inte-gration of sensing, transmission and control for industrial network systems: challenges and recent developments. Acta Automatica Sinica, 2019, 45(01): 25−36 [6] 田辉, 贺硕, 林尚静, 范绍帅, 聂高峰, 蒋秀蓉. 工业互联网感知通信控制协同融合技术研究综述. 通信学报, 2021, 42(10): 211−221Tian Hui, He Shuo, Lin Shang-Jing, Fan Shao-Shuai, Nie Gao-Feng, Jiang Xiu-Rong. Survey on cooperative fusion technologies with perception, communication and control coupled in industrial Internet. Journal on Communications, 2021, 42(10): 211−221 [7] Liu W C, Popovski P, Li Y H, Vucetic B. Wireless networked control systems with coding-free data transmission for industrial iot. IEEE Internet of Things Journal, 2020, 7(3): 1788−1801 doi: 10.1109/JIOT.2019.2957433 [8] Cai J, Liu W, Huang Z W, Yu F R. Task decomposition and hierarchical scheduling for collaborative cloud-edge-end computing. IEEE Transactions on Services Computing, 2024, 17(6): 4368−4382 doi: 10.1109/TSC.2024.3402169 [9] Wang M, Zhang Y J, He X, Yu S H. Joint scheduling and offloading of computational tasks with time dependency under edge computing networks. Simulation Modelling Practice and Theory, 2023, 129: 102824 doi: 10.1016/j.simpat.2023.102824 [10] Pang G Y, Liu W C, Niyato D, Vucetic B, Li Y H. Communication-control codesign for large-scale wireless networked control systems. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3295−3312 doi: 10.1109/JSAC.2025.3574602 [11] Huang J W, Wan J Y, Lv B F, Ye Q, Chen Y. Joint computation offloading and resource allocation for edge-cloud collaboration in internet of vehicles via deep reinforcement learning. IEEE Systems Journal, 2023, 17(2): 2500−2511 doi: 10.1109/JSYST.2023.3249217 [12] Lu X T, Li J. Improving stability and performance in iot-driven networked control systems. Computers and Electrical Engineering, 2024, 119: 109537 doi: 10.1016/j.compeleceng.2024.109537 [13] Fan W B, Xiao F, Pan Y, Chen X B, Han L, Yu S. Latency-aware joint task offloading and energy control for cooperative mobile edge computing. IEEE Transactions on Services Computing, 2025, 18(3): 1515−1528 doi: 10.1109/TSC.2025.3553708 [14] Moshiri P F, Simsek M, Kantarci B. Joint optimization of completion ratio and latency of offloaded tasks with multiple priority levels in 5g edge. IEEE Transactions on Network and Service Management, 2025, 22(2): 1357−1371 doi: 10.1109/TNSM.2024.3525004 [15] 泮佩言, 胡炳涛, 冯毅雄, 张志峰, 汪勇, 李传江, 等. 云-边-端协同环境下基于改进深度Q网络的资源调度机制. 计算机集成制造系统, 2025, 31(10): 3513−3525 doi: 10.13196/j.cims.2024.S02Pan Pei-Yan, Hu Bing-Tao, Feng Yi-Xiong, Zhang Zhi-Feng, Wang Yong, Li Chuan-Jiang, et al. Improved deep q network-based resource scheduling mechanism in cloud-edge-terminal collaborative environments. Computer Integrated Manufacturing System, 2025, 31(10): 3513−3525 doi: 10.13196/j.cims.2024.S02 [16] Liu L K, Lu S D, Zhong R, Wu B F, Yao Y T, Zhang Q Y, et al. Computing systems for autonomous driving: state of the art and challenges. IEEE Internet of Things Journal, 2021, 8(8): 6469−6486 doi: 10.1109/JIOT.2020.3043716 [17] Alatise M B, Hancke G P. A review on challenges of autonomous mobile robot and sensor fusion methods. IEEE Access, 2020, 8: 39830−39846 doi: 10.1109/ACCESS.2020.2975643 [18] Jia Y J, Song Y, Xiong B, Cheng J Y, Zhang W, Yang S X, et al. Hierarchical perception-improving for decentralized multi-robot motion planning in complex scenarios. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 6486−6500 doi: 10.1109/TITS.2023.3344518 [19] Kehl P, Lange D, Maurer F K, Nemeth G, Overbeck D, Jung D, et al. Comparison of 5g enabled control loops for production. In: Proceedings of the 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications. London, UK: IEEE, 2020. 1-6 [20] Ma Z, Xiao M, Xiao Y, Pang Z B, Poor H V, Vucetic B. High-reliability and low-latency wireless communication for internet of things: challenges, fundamentals, and enabling technologies. IEEE Internet of Things Journal, 2019, 6(5): 7946−7970 doi: 10.1109/JIOT.2019.2907245 [21] Bonati L, Polese M, Oro S D, Basagni S, Melodia T. Open, programmable, and virtualized 5g networks: state-of-the-art and the road ahead. Computer Networks, 2020, 182: 107516 doi: 10.1016/j.comnet.2020.107516 [22] Kehl P, Ansari J, Jafari M H, Becker P, Sachs J, Konig N, et al. Prototype of 5g integrated with tsn for edge-controlled mobile robotics. Electronics, 2022, 11(11): 1666 doi: 10.3390/electronics11111666 [23] Lin S C, Zhang Y, Hsu C H, Skach M, Haque M E, Tang L, et al. The architectural implications of autonomous driving: constraints and acceleration. In: Proceedings of the 23th International Conference on Architectural Support for Programming Languages and Operating Systems. New York, USA: Association for Computing Machinery, 2018. 751-766 [24] Fan W H, Gao L, Su Y, Wu F, Liu Y A. Joint dnn partition and resource allocation for task offloading in edge–cloud-assisted iot environments. IEEE Internet of Things Journal, 2023, 10(12): 10146−10159 doi: 10.1109/JIOT.2023.3237361 [25] Qiao Y, Fu Y S, Yuan M Y. Communication–control co-design in wireless networks: a cloud control agv example. IEEE Internet of Things Journal, 2023, 10(3): 2346−2359 doi: 10.1109/JIOT.2022.3211766 [26] Lyv H H, Pang Z B, Bhimavarapu K, Yang G. Impacts of wireless on robot control: the network hardware-in-the-loop simulation framework and real-life comparisons. IEEE Transactions on Industrial Informatics, 2023, 19(9): 9255−9265 doi: 10.1109/TII.2022.3227639 [27] Zhao G D, Imran M A, Pang Z B, Chen Z, Li L Y. Toward real-time control in future wireless networks: communication-control co-design. IEEE Communications Magazine, 2019, 57(2): 138−144 doi: 10.1109/MCOM.2018.1800163 [28] Wang Y, Wu S H, Lei C J, Jiao J, Zhang Q Y. A review on wireless networked control system: the communication perspective. IEEE Internet of Things Journal, 2024, 11(5): 7499−7524 doi: 10.1109/JIOT.2023.3342032 [29] Chamaken A, Litz L. Joint design of control and communication in wireless networked control systems: A case study. In: Proceedings of American Control Conference. Baltimore, MD, USA: IEEE, 2010. 1835-1840 [30] Park P, Araújo J, Johansson K H. Wireless networked control system co-design. In: Proceedings of International Conference on Networking, Sensing and Control. Delft, Netherlands: IEEE, 2011. 486-491 [31] Zhang H Y, Zhou Y N, Gao F, Leng X B, Gui P F. NDAC powered deep-level cloudification technology for mobile robotics. In: Proceedings of the 100th Vehicular Technology Conference. Washington, DC, USA: IEEE, 2024. 1-5 [32] Mejdi H, Elmadssia S, Ezzedine T. Influence of interference and sampling period in the performance of networked control systems. In: Proceedings of International Symposium on Networks, Computers and Communications. Doha, Qatar: IEEE, 2023. 1-5 [33] Sun H Y, Mu H R, Sun J, Han H G, Qiao J F. Output feedback synthesis for networked control systems with packet dropouts and multiple probability sampling periods: the stochastic communication protocol case. IEEE Transactions on Cybernetics, 2025, 55(10): 4808−4819 doi: 10.1109/TCYB.2025.3594482 [34] Cao Z R, Wang Z D, Song J, Niu Y G. Sliding-mode control for sampled-data systems over fading channels: dealing with randomly switching sampling periods. IEEE Transactions on Automatic Control, 2024, 69(5): 3190−3197 doi: 10.1109/TAC.2023.3321689 [35] Pang Y Y, Liu Z Y, Guo H B, et al. Variable gain based predictive output tracking control of networked systems. In: Proceedings of the 14th Asian Control Conference. Dalian, China: IEEE, 2024. 1004-1008 [36] Bahraini M, Zanon M, Colombo A, Falcone P. Optimal control design for perturbed constrained networked control systems. IEEE Control Systems Letters, 2021, 5(2): 553−558 doi: 10.1109/LCSYS.2020.3004204 [37] Ma P B, Ji J, Sui J B, Lei M. Research on cooperative formation flight control of multi-uav with communication time delay. In: Proceedings of International Conference on Control Science and Electric Power Systems. Shanghai, China: IEEE, 2021. 54-58 [38] Liu T S, Zhang J T, Liu Y, Zhuang C Y, Li H, Chen Y Y. Integrated communication, sensing, computing, and control for industrial power protection systems: analysis and performance optimization. IEEE Access, 2025, 13: 137117−137128 doi: 10.1109/ACCESS.2025.3595277 [39] Cecil R, Setka V, Tolar D, Sikora A. Retis–real-time sensitive wireless communication solution for industrial control applications. In: Proceedings of the 5th International Symposium on Smart and Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems. Dortmund, Germany: IEEE, 2020. 1-9 [40] Wang Q, Huang Y H, Chen Z B, Qin G W. Smooth control strategy for remote-controlled robot under unstable time delay between controller and robot. In: Proceedings of the 2nd International Conference on Control, Electronics and Computer Technology. Jilin, China: IEEE, 2024. 504-507 [41] Lu Z W, Zhan X S, Wu J, Wu B. Performance limitations of network control systems under channel delay and packet dropouts. International Journal of Control, Automation and Systems, 2024, 22(10): 3044−3051 doi: 10.1007/s12555-023-0633-y [42] Yang Z Y, Casas J, Villamil A, Fettweis G P. Joint resource allocation and controller selection for communication and control co-design. In: Proceedings of International Conference on Communications in China. Shanghai, China: IEEE, 2025. 1-6 [43] Wang X L, Chen C L, He J P, Zhu S Y, Guan X P. AoI-aware control and communication co-design for industrial iot systems. IEEE Internet of Things Journal, 2021, 8(10): 8464−8473 doi: 10.1109/JIOT.2020.3046742 [44] Chen F F, Tang J H, Yin Z H. Age of loop information with flexible transmission enabled communication and control co-design in industrial iot. China Communications, 2024, 21(11): 40−55 doi: 10.23919/jcc.fa.2024-0218.202411 [45] Chang B, Zhao G D, Chen Z, Li L Y, Imran M A. Packet-drop design in urllc for real-time wireless control systems. IEEE Access, 2019, 7: 183081−183090 doi: 10.1109/ACCESS.2019.2928681 [46] Zheng M, Zhang L, Liang W. Control-aware resource scheduling method for wireless networked control systems. IEEE Sensors Journal, 2023, 23(18): 21946−21955 doi: 10.1109/JSEN.2023.3301489 [47] Scheuvens L, Hobler T, Barreto A N, Fettweis G P. Wireless control communications co-design via application-adaptive resource management. In: Proceedings of the 2nd 5G World Forum. Dresden, Germany: IEEE, 2019. 298-303 [48] Li J X, Khosravirad S R, Du J F, Liu W C, Mitra U. Communication and control interfacing for co-design of wireless control systems. In: Proceedings of the 97th Vehicular Technology Conference. Florence, Italy: IEEE, 2023. 1-5 [49] Chang B, Zhang L, Li L Y, Zhao G D, Chen Z. Optimizing resource allocation in urllc for real-time wireless control systems. IEEE Transactions on Vehicular Technology, 2019, 68(9): 8916−8927 doi: 10.1109/TVT.2019.2930153 [50] Zeng T C, Semiari O, Saad W, Bennis M. Integrated communications and control co-design for wireless vehicular platoon systems. In: Proceedings of International Conference on Communications. Kansas City, USA: IEEE, 2018. 1-6 [51] Licea D B, Ghogho M, Saska M. When robotics meets wireless communications: an introductory tutorial. Proceedings of the IEEE, 2024, 112(2): 140−177 doi: 10.1109/JPROC.2024.3380373 [52] Oyekanlu E A, Smith A C, Thomas W P, Mulroy G, Hitesh D, Ramsey M, et al. A review of recent advances in automated guided vehicle technologies: integration challenges and research areas for 5g-based smart manufacturing applications. IEEE Access, 2020, 8: 202312−202353 doi: 10.1109/ACCESS.2020.3035729 [53] Gatsis K, Ribeiro A, Pappas G J. State-based communication design for wireless control systems. In: Proceedings of the 55th Conference on Decision and Control. Las Vegas, NV, USA: IEEE, 2016. 129-134 [54] Gatsis K, Hassani H, Pappas G J. Latency-reliability tradeoffs for state estimation. IEEE Transactions on Automatic Control, 2021, 66(3): 1009−1023 doi: 10.1109/TAC.2020.2992563 [55] Tatikonda S, Mitter S. Control under communication constraints. IEEE Transactions on Automatic Control, 2004, 49(7): 1056−1068 doi: 10.1109/TAC.2004.831187 [56] Tayade S, Rost P, Maeder A, Schotten H D. Impact of short blocklength coding on stability of an agv control system in industry 4.0. In: Proceedings of International Conference on Communications Workshops. Dublin, Ireland: IEEE, 2020. 1-6 [57] Kaul S, Yates R, Gruteser M. Real-time status: how often should one update?. In: Proceedings of International Conference on Computer Communications. Orlando, FL, USA: IEEE, 2012. 2731-2735 [58] Ren C, Chen C L, Li P Z, Guan X P. Communication and computation resource allocation for digital twin in iiot systems. In: Proceedings of China Automation Congress. Beijing, China: IEEE, 2021. 7364-7369 [59] Damigos G, Lindgren T, Nikolakopoulos G. Toward 5g edge computing for enabling autonomous aerial vehicles. IEEE Access, 2023, 11: 3926−3941 doi: 10.1109/ACCESS.2023.3235067 [60] Wang J, Feng D Q, Zhang S L, Liu A, Xia X G. Joint computation offloading and resource allocation for mec-enabled iot systems with imperfect csi. IEEE Internet of Things Journal, 2021, 8(5): 3462−3475 doi: 10.1109/JIOT.2020.3022802 [61] Liu C F, Bennis M, Debbah M, Poor H V. Dynamic task offloading and resource allocation for ultra-reliable low-latency edge computing. IEEE Transactions on Communications, 2019, 67(6): 4132−4150 doi: 10.1109/TCOMM.2019.2898573 [62] Xiong Z H, Kang J W, Niyato D, Wang P, Poor H V. Cloud/edge computing service management in blockchain networks: multi-leader multi-follower game-based admm for pricing. IEEE Transactions on Services Computing, 2020, 13(2): 356−367 doi: 10.1109/tsc.2019.2947914 [63] Ye Q, Shi W S, Qu K G, He H L, Zhuang W H, Shen X M. Joint ran slicing and computation offloading for autonomous vehicular networks: a learning-assisted hierarchical approach. IEEE Open Journal of Vehicular Technology, 2021, 2: 272−288 doi: 10.1109/OJVT.2021.3089083 [64] Zhou C Y, Liu J Y, Qu K G, Sheng M, Li J D, Zhuang W H. Delay-aware uav computation offloading and communication assistance for post-disaster rescue. IEEE Transactions on Wireless Communications, 2024, 23(12): 19110−19125 doi: 10.1109/TWC.2024.3479709 [65] Taami T, Krug S, Nils M O. Experimental characterization of latency in distributed iot systems with cloud fog offloading. In: Proceedings of the 15th IEEE International Workshop on Factory Communication Systems. Sundsvall, Sweden: IEEE, 2019. 1-4 [66] Fan W H, Su Y, Liu J, Li S M, Huang W, Wu F, et al. Joint task offloading and resource allocation for vehicular edge computing based on v2i and v2v modes. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(4): 4277−4292 doi: 10.1109/TITS.2022.3230430 [67] Zhang F, Han G J, Liu L, Zhang Y, Peng Y, Li C. Cooperative partial task offloading and resource allocation for iiot based on decentralized multiagent deep reinforcement learning. IEEE Internet of Things Journal, 2024, 11(3): 5526−5544 doi: 10.1109/JIOT.2023.3306803 [68] Li Y J, Huynh D V, Nguyen V L, Ha D B, Zepernick H J, Duong T Q. Multiagent uav-aided urllc mobile edge computing systems: a joint communication and computation optimization approach. IEEE Systems Journal, 2024, 18(4): 1828−1838 doi: 10.1109/JSYST.2024.3426096 [69] Zeng S, Huang X H, Li D D. Joint communication and computation cooperation in wireless-powered mobile-edge computing networks with noma. IEEE Internet of Things Journal, 2023, 10(11): 9849−9862 doi: 10.1109/JIOT.2023.3236089 [70] Zhu N Y, Xu X D, Han S J, Lv S Y. Sleep-scheduling and joint computation-communication resource allocation in mec networks for 5g iiot. In: Proceedings of Wireless Communications and Networking Conference. Nanjing, China: IEEE, 2021. 1-7 [71] Zhao Z X, Yang Z H, Pham Q V, Yang Q Q, Zhang Z Y. Semantic communication with probability graph: a joint communication and computation design. In: Proceedings of the 98th Vehicular Technology Conference. Hong Kong, Hong Kong: IEEE, 2023. 1-5 [72] Duy T D, Huynh D V, Dobre O A, Canberk B, Duong T Q. Digital twin-aided intelligent offloading with edge selection in mobile edge computing. IEEE Wireless Communications Letters, 2022, 11(4): 806−810 doi: 10.1109/LWC.2022.3146207 [73] Huynh D V, Khosravirad S R, Cotton S L, Vu T X, Dobre O A, Shin H D, et al. Joint sensing, communications, and computing design for 6g urllc service-oriented mec networks. IEEE Internet of Things Journal, 2024, 11(20): 32429−32439 doi: 10.1109/JIOT.2024.3418650 [74] Shang C, Sun Y, Luo H, Guizani M. Computation offloading and resource allocation in noma–mec: a deep reinforcement learning approach. IEEE Internet of Things Journal, 2023, 10(17): 15464−15476 doi: 10.1109/JIOT.2023.3264206 [75] Chen Y S, Hsu C S, Hung H C. Optimizing communication and computational resource allocations in network slicing using twin-gan-based drl for 5g hybrid c-ran. Computer Communications, 2023, 200, 66-85 [76] Chen X F, Wu C, Chen T, Liu Z, Zhang H G, Bennis M, et al. Information freshness-aware task offloading in air-ground integrated edge computing systems. IEEE Journal on Selected Areas in Communications, 2022, 40(1): 243−258 doi: 10.1109/JSAC.2021.3126075 [77] Jiang W W, Ai B, Li M S, Wu W, Pei Y Y, Shen X M. Aerial-irss-assisted energy-efficient task offloading and computing. IEEE Internet of Things Journal, 2024, 11(11): 20178−20193 doi: 10.1109/JIOT.2024.3371586 [78] Zhu J H, Gong J. Online scheduling of transmission and processing for aoi minimization with edge computing. In: Proceedings of Conference on Computer Communications Workshops. New York, NY, USA: IEEE, 2022. 1-6 [79] Huang N, Dou C L, Wu Y, Qian L P, Lu R X. Energy-efficient integrated sensing and communication: a multi-access edge computing design. IEEE Wireless Communications Letters, 2023, 12(12): 2053−2057 doi: 10.1109/LWC.2023.3306433 [80] Li M S, Cheng N, Gao J, Wang Y L, Zhao L, Shen X M. Energy-efficient uav-assisted mobile edge computing: resource allocation and trajectory optimization. IEEE Transactions on Vehicular Technology, 2020, 69(3): 3424−3438 doi: 10.1109/TVT.2020.2968343 [81] Hoa T D, Kim D S. Dynamic collaborative task offloading for delay minimization in the heterogeneous fog computing systems. Journal of Communications and Networks, 2023, 25(2): 244−252 doi: 10.23919/jcn.2023.000008 [82] Huang N, Wang T S, Wu Y, Wu Q Q, Quek T Q. Integrated sensing and communication assisted mobile edge computing: an energy-efficient design via intelligent reflecting surface. IEEE Wireless Communications Letters, 2022, 11(10): 2085−2089 doi: 10.1109/LWC.2022.3193706 [83] Huang N, Dou C L, Wu Y, Qian L P, Lin B, Zhou H B, et al. Mobile edge computing aided integrated sensing and communication with short-packet transmissions. IEEE Transactions on Wireless Communications, 2024, 23(7): 7759−7774 [84] Huynh D V, Nguyen V D, Chatzinotas S, Khosravirad R, Poor H V, Duong T Q. Joint communication and computation offloading for ultra-reliable and low-latency with multi-tier computing. IEEE Journal on Selected Areas in Communications, 2023, 41(2): 521−537 doi: 10.1109/JSAC.2022.3227088 [85] Sun F, Zhang Z J, Chang X L, Zhu K G. Toward heterogeneous environment: lyapunov-orientated imphetero reinforcement learning for task offloading. IEEE Transactions on Network and Service Management, 2023, 20(2): 1572−1586 doi: 10.1109/TNSM.2023.3266779 [86] Luo Q Y, Luan T H, Shi W S, Fan P Z. Deep reinforcement learning based computation offloading and trajectory planning for multi-uav cooperative target search. IEEE Journal on Selected Areas in Communications, 2023, 41(2): 504−520 doi: 10.1109/JSAC.2022.3228558 [87] Paul S K, Chowdhury M T, Nicolescu M, Nicolescu M, Seifer D F. Object detection and pose estimation from rgb and depth data for real-time, adaptive robotic grasping. In: Proceedings of IPCV'20, HIMS'20, BIOCOMP'20, and BIOENG'20. Springer, 2021. 121-142 [88] Heins T, Glebke R, Stoffers M, Gurumurthy S, Heesemann J, Josevski M, et al. Delay-aware model predictive control for fast frequency control. In: Proceedings of International Conference on Communications, Control, and Computing Technologies for Smart Grids. Glasgow, United Kingdom: IEEE, 2023. 1-7 [89] Yang J Z, Wu Q X, Li S N, Ye Y J, Luo C F. Integrated modeling and control optimization of biped wheel-legged robot. IEEE Robotics and Automation Letters, 2025, 10(2): 1465−1472 doi: 10.1109/LRA.2024.3522773 [90] Elsafi A, Elhag A A M, Gabralla L A, Ali A, Ibrahim A O. Extending ddpg with physics-informed constraints for energy-efficient robotic control. Computer Modeling in Engineering and Sciences, 2025, 145(1): 621−647 doi: 10.32604/cmes.2025.072726 [91] Cheng Y X, Liu Z J, Chen Q B, Liang C C. A delay-aware edge computing and power control scheme in noma-enabled cognitive radio networks. In: Proceedings of the 90th Vehicular Technology Conference. Honolulu, HI, USA: IEEE, 2019. 1-5 [92] Yuan Q, Li J L, Zhou H B, Lin T, Luo G Y, Shen X M. A joint service migration and mobility optimization approach for vehicular edge computing. IEEE Transactions on Vehicular Technology, 2020, 69(8): 9041−9052 doi: 10.1109/TVT.2020.2999617 [93] Xu C, Tang Z X, Yu H B, Zeng P, Kong L H. Digital twin-driven collaborative scheduling for heterogeneous task and edge-end resource via multi-agent deep reinforcement learning. IEEE Journal on Selected Areas in Communications, 2023, 41(10): 3056−3069 doi: 10.1109/JSAC.2023.3310066 [94] Liu J J, Lu Y L, Wu H, Ai B, Jamalipour A, Zhang Y. Joint task coding and transfer optimization for edge computing power networks. IEEE Transactions on Network Science and Engineering, 2025, 12(4): 2783−2796 doi: 10.1109/TNSE.2025.3554100 [95] Jiang F S, Ren Y, Xiao Y Y, Zhang Y, Li B, Xia Q. Battery degradation-aware vehicle routing problem for heterogeneous electric vertical takeoff and landing aircraft delivery fleets. Energy Conversion and Management, 2026, 348: 120778 doi: 10.1016/j.enconman.2025.120778 [96] Kehoe B, Patil S, Abbeel P, Goldberg K. A survey of research on cloud robotics and automation. IEEE Transactions on Automation Science and Engineering, 2015, 12(2): 398−409 doi: 10.1109/TASE.2014.2376492 [97] Gan Y H, Zhang B, Shao J W, Han Z, Li A, Dai X Z. Embodied intelligence: bionic robot controller integrating environment perception, autonomous planning, and motion control. IEEE Robotics and Automation Letters, 2024, 9(5): 4559−4566 doi: 10.1109/LRA.2024.3377559 [98] Ren L, Dong J B, Liu S, Zhang L, Wang L H. Embodied intelligence toward future smart manufacturing in the era of AI foundation model. IEEE/ASME Transactions on Mechatronics, 2024, 30(4): 2632−2642 doi: 10.1109/tmech.2024.3456250 [99] Li L X, Li Y C, Zhang X T, He Y H, Yang J J, Tian B, et al. Embodied intelligence in mining: leveraging multi-modal large language models for autonomous driving in mines. IEEE Transactions on Intelligent Vehicles, 2024, 9(5): 4831−4834 doi: 10.1109/TIV.2024.3417938 [100] Song Y X, Sun P L, Liu H Y, Li Z X, Song W, Xiao Y H, et al. Scene-driven multimodal knowledge graph construction for embodied ai. IEEE Transactions on Knowledge and Data Engineering, 2024, 36(11): 6962−6976 doi: 10.1109/TKDE.2024.3399746 [101] Xing E P, Ho Q R, Dai W, Kim J K, Wei J L, Lee S, et al. Petuum: a new platform for distributed machine learning on big data. IEEE Transactions on Big Data, 2015, 1(2): 49−67 doi: 10.1109/TBDATA.2015.2472014 [102] Wu H M, Zhang Z R, Guan C, Wolter K, Xu M X. Collaborate edge and cloud computing with distributed deep learning for smart city internet of things. IEEE Internet of Things Journal, 2020, 7(9): 8099−8110 doi: 10.1109/JIOT.2020.2996784 [103] Hosseinalipour S, Brinton C G, Aggarwal V, Dai H Y, Chiang M. From federated to fog learning: distributed machine learning over heterogeneous wireless networks. IEEE Communications Magazine, 2020, 58(12): 41−47 doi: 10.1109/MCOM.001.2000410 [104] Balogh M, Vidacs A, Feher G, Maliosz M, Horváth M A, Reider N, et al. Cloud-controlled autonomous mobile robot platform. In: Proceedings of the 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications. Helsinki, Finland: IEEE, 2021. 1-6 [105] Grosjean L, Sachs J, Ansari J, Reider N, Herranz A H, Holmberg C. A framework for communication–compute–control co-design in cyber–physical systems. Electronics, 2025, 14(5): 864 doi: 10.3390/electronics14050864 [106] Xia C Q, Liu Y Q, Xia T H, Jin X, Xu C, Zeng P. Control–communication–computing co-design in cyber–physical production system. IEEE Internet of Things Journal, 2023, 10(6): 5194−5204 doi: 10.1109/JIOT.2022.3221932 [107] Yao J C, Xu W, Zhu G X, Huang K B, Cui S G. Energy-efficient edge inference in integrated sensing, communication, and computation networks. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3580−3595 doi: 10.1109/JSAC.2025.3574612 [108] Tang Q Q, Yang Y T, Cui J Y, Xie R C, Huang T, Chen T J, et al. Seco4: co-design of sensing, communication, and computing for intelligent control in industrial cyber-physical systems. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3362−3378 doi: 10.1109/JSAC.2025.3574623 [109] Fresa A, Ferrarese N, Liu Y, Ferizbegovic M, Herranz A H. Profiling-and learning-based co-design of communication and compute in scalable robotics. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3519−3531 doi: 10.1109/JSAC.2025.3574600 [110] Ho T M, Nguyen K K, Cheriet M. AI-powered digital twins for robotic control in 5g-enabled industrial automation. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3347−3361 doi: 10.1109/JSAC.2025.3574625 [111] Zhang P, Yang H, Feng Z Y, Cui Y P, Dai J C, Qin X Q, et al. Toward intelligent and efficient 6G networks: jcsc enabled on-purpose machine communications. IEEE Wireless Communications, 2023, 30(1): 150−157 doi: 10.1109/MWC.014.2100641 [112] Ibarra L P O, Gutierrez D G, Cavalcanti D, Barragan H C. Observers and predictors for wireless time-sensitive control loops. In: Proceedings of the 16th IEEE International Conference on Factory Communication Systems. Porto, Portugal: IEEE, 2020. 1-7 [113] Zhang Y C, Hu J, Min G Y. Digital twin-driven intelligent task offloading for collaborative mobile edge computing. IEEE Journal on Selected Areas in Communications, 2023, 41(10): 3034−3045 doi: 10.1109/JSAC.2023.3310058 [114] Huynh D V, Nguyen V D, Khosravirad S R, Karagiannidis G K, Duong T Q. Distributed communication and computation resource management for digital twin-aided edge computing with short-packet communications. IEEE Journal on Selected Areas in Communications, 2023, 41(10): 3008−3021 doi: 10.1109/JSAC.2023.3310087 [115] Fang X R, Lei C L Y, Feng W, Chen Y F, Xiao M, Ge N, et al. Sensing-communication-computing-control closed-loop optimization for 6g digital twin-empowered robotic systems. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3330−3346 doi: 10.1109/JSAC.2025.3574601 [116] Yuan X M, Tian H S, Zhang X L, Du H Y, Zhang N, Huang K B, et al. Digital twin-driven madrl approaches for communication-computing-control co-optimization. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3596−3611 doi: 10.1109/JSAC.2025.3574616 [117] Chen Y N, Wu D, Hou B B, Zhou L, Sari H. Exploring accurate monitoring for massive iiot: a digital twin-enabled hierarchical scheme. IEEE Journal on Selected Areas in Communications, 2025, 43(10): 3472−3486 doi: 10.1109/JSAC.2025.3574609 [118] Fang X R, Lei C Y, Feng W, Chen Y F, Xiao M, Ge N, et al. Sensing-communication-computing-control closed-loop optimization for 6g unmanned robotic systems. arXiv: 2410.18382, 2024. [119] Baxi A, Eisen M, Sudhakaran S, Oboril F, Murthy G S, Mageshkumar V S, et al. Towards factory-scale edge robotic systems: challenges and research directions. IEEE Internet of Things Magazine, 2022, 5(3): 26−31 doi: 10.1109/IOTM.001.2200056 [120] Merwaday A, Vannithamby R, Eisen M, Sudhakaran S, Cavalcanti D A, Frascolla V. Communication-control co-design for robotic manipulation in 5g industrial iot. In: Proceedings of the 21st International Conference on Industrial Informatics. Lemgo, Germany: IEEE, 2023. 1-6 [121] Sudhakaran S, Ali I, Eisen M, Ramirez J P, Cazan C, Frascolla V, et al. Zero-delay roaming for mobile robots enabled by wireless tsn redundancy. In: Proceedings of the 19th International Conference on Factory Communication Systems. Pavia, Italy: IEEE, 2023. 1-8 [122] Damigos G, Saradagi A, Sandberg S, Nikolakopoulos G. Environmental awareness dynamic 5g qos for retaining real time constraints in robotic applications. In: Proceedings of International Conference on Robotics and Automation. Yokohama, Japan: IEEE, 2024. 12069-12075 [123] Eisen M, Shukla S, Cavalcanti D, Baxi A S. Communication-control co-design in wireless edge industrial systems. In: Proceedings of the 18th International Conference on Factory Communication Systems. Pavia, Italy: IEEE, 2022. 1-8 [124] Alameddine H A, Sharafeddine S, Sebbah S, Ayoubi S, Assi C. Dynamic task offloading and scheduling for low-latency iot services in multi-access edge computing. IEEE Journal on Selected Areas in Communications, 2019, 37(3): 668−682 doi: 10.1109/JSAC.2019.2894306 [125] Camisa A, Notarnicola I, Notarstefano G. Distributed primal decomposition for large-scale milps. IEEE Transactions on Automatic Control, 2022, 67(1): 413−420 doi: 10.1109/TAC.2021.3057061 [126] Urbaniak D, Damsgaard S B, Zhang W F, Rosell J, Suárez R, Suppa M. Distributed control for collaborative robotic systems using 5g edge computing. IEEE Access, 2024, 12: 148706−148718 doi: 10.1109/ACCESS.2024.3475584 [127] Lyu H H, Pang Z B, Bengtsson A, Nilsson S, Isaksson A J, Yang G. Latency-aware control for wireless cloud-fog automation: framework and case study. IEEE Transactions on Automation Science and Engineering, 2025, 22: 5400−5410 doi: 10.1109/TASE.2024.3420770 [128] 王耀南, 江一鸣, 姜娇, 张辉, 谭浩然, 彭伟星, 等. 机器人感知与控制关键技术及其智能制造应用. 自动化学报, 2023, 49(03): 494−513 doi: 10.16383/j.aas.c220995Wang Yao-Nan, Jiang Yi-Ming, Jiang Jiao, Zhang Hui, Tan Hao-Ran, Peng Wei-Xing, et al. Key technologies of robot perception and control and its intelligent manufacturing applications. Acta Automatica Sinica, 2023, 49(03): 494−513 doi: 10.16383/j.aas.c220995 [129] 王耀南, 谢核, 邓晶丹, 毛建旭, 李文龙, 张辉. 智能制造测量机器人关键技术研究综述. 机械工程学报, 2024, 60(16): 1−18WANG Yao-Nan, XIE He, DENG Jing-Dan, Mao Jian-Xu, LI Wen-Long, ZHANG Hui. Overview of key technologies for measurement robots intelligent manufacturing. Journal of Mechanical Engineering, 2024, 60(16): 1−18 -

 下载:
下载:

计量
- 文章访问数: 198
- HTML全文浏览量: 201
- 被引次数: 0
