

-
摘要: 针对表面肌电信号和人体运动等模型误差引起的运动估计性能下降问题, 提出一种基于门控渐进高斯滤波网络(gated progressive Gaussian filtering network, GPGF-net) 的人体运动估计方法, 以实现对模型误差的补偿以及提升运动估计的精度. 首先, 设计门控记忆机制来调控信息流, 以学习出系统状态的长期依赖与观测信号的时变特性, 从而动态调整误差补偿项的分布参数. 其次, 通过融合贝叶斯滤波与深度学习的优势, 引入渐进式观测更新策略到GPGF-net, 以减小非线性近似误差以及增强模型鲁棒性. 最后, 通过人体肢体运动估计实验表明, 相较于现有方法, GPGF-net显著提高了估计精度, 均方根误差降低15.62 %, 相关系数R2提升5.08 %, 验证了所提方法的有效性.Abstract: To address the issue of degraded motion estimation performance caused by surface electromyography model and human motion model errors, this paper proposes a human motion estimation method based on gated progressive Gaussian filtering network (GPGF-net), aiming to effectively compensate for model errors and improve the accuracy of motion estimation. First, a gated memory mechanism is designed to regulate the flow of information, enabling the model to learn long-term dependencies in system states and time-varying characteristics of observation signals, thereby dynamically adjusting the distribution parameters of the error compensation term. Secondly, by integrating the advantages of Bayesian filtering and deep learning, a progressive multi-step observation update strategy is introduced into the GPGF-net to reduce nonlinear approximation errors and enhance model robustness. Finally, experiments on human limb motion estimation demonstrate that, compared with existing methods, GPGF-net significantly improves estimation accuracy, reducing the root mean square error by 15.62 % and increasing the correlation coefficient R2 by 5.08 %, thus validating the effectiveness of the proposed method.
-
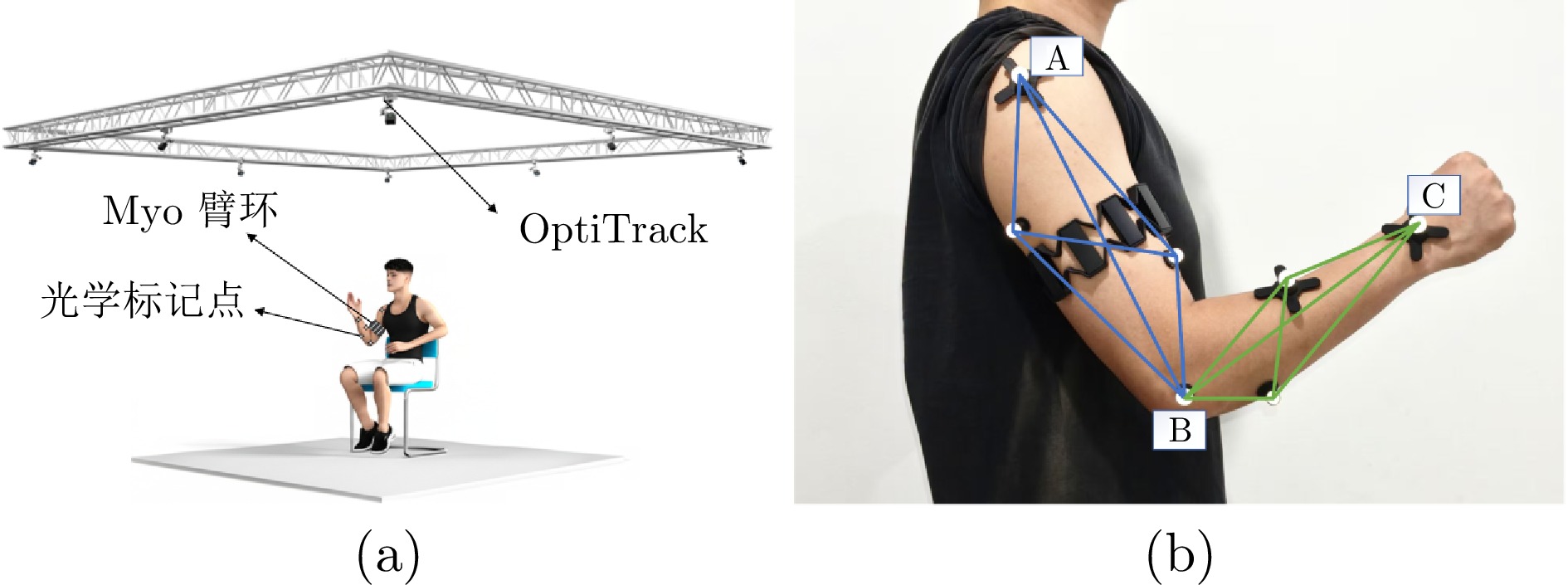
图 4 实验系统与设备布置((a)数据采集场景; (b)传感器佩戴布局)
Fig. 4 Experimental system and equipment setup((a) Data acquisition scenario; (b) Sensor placement layout)
表 1 模型性能评价
Table 1 Evaluation of model performances
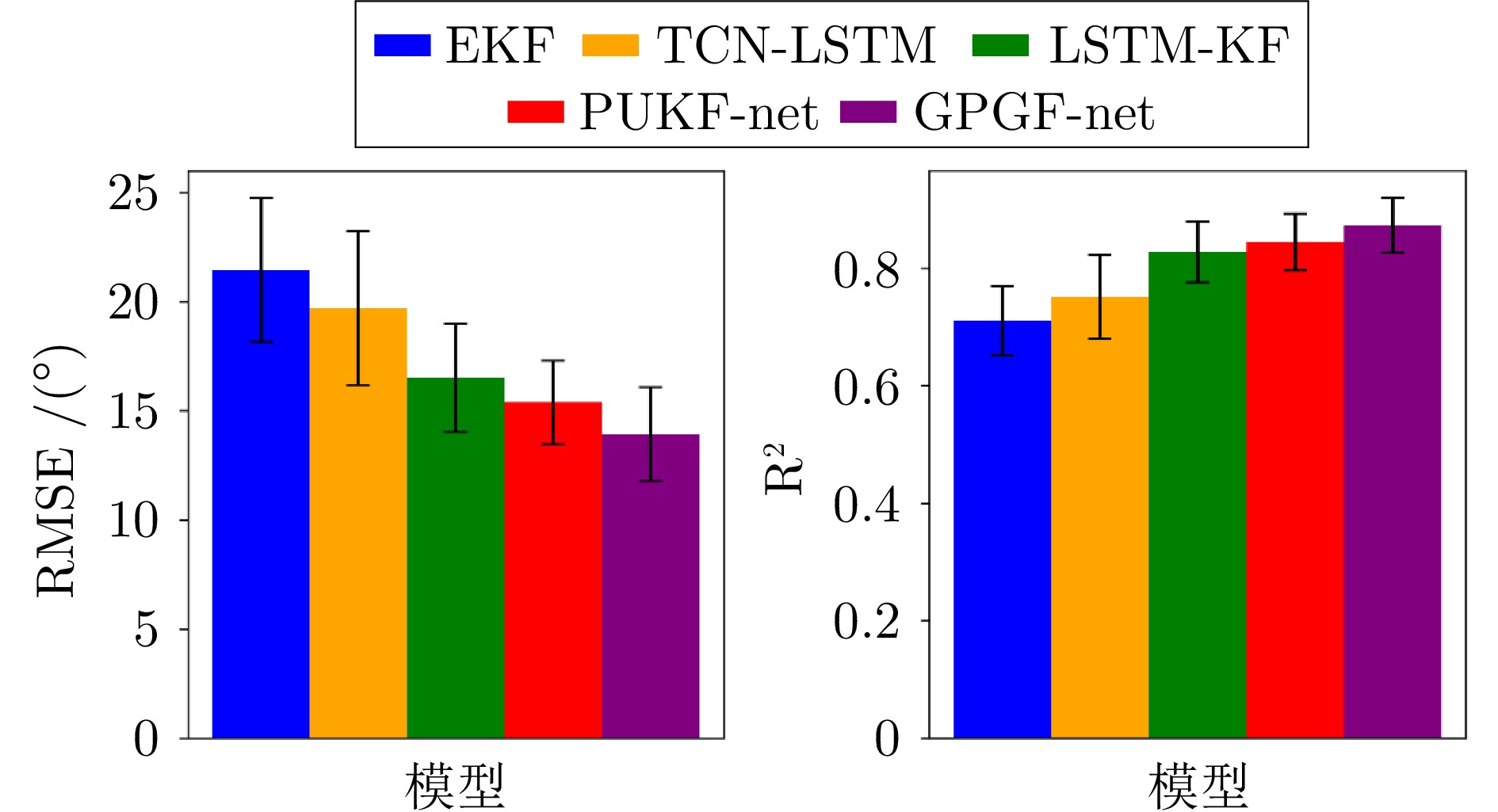
测试者 RMSE R2 EKF TCN-LSTM LSTM-KF PUKF-net GPGF-net EKF TCN-LSTM LSTM-KF PUKF-net GPGF-net S1 20.332 16.632 13.654 12.940 11.349 0.753 0.823 0.892 0.906 0.920 S2 22.351 22.787 18.678 16.980 15.436 0.622 0.631 0.765 0.824 0.846 S3 20.662 20.735 16.996 15.434 14.031 0.718 0.712 0.821 0.842 0.876 S4 18.624 17.238 14.353 13.048 11.851 0.772 0.811 0.886 0.898 0.910 S5 20.648 20.895 20.366 18.502 17.995 0.710 0.699 0.750 0.765 0.765 S6 22.992 16.642 13.644 12.956 11.778 0.614 0.821 0.898 0.905 0.913 S7 19.965 17.965 17.164 15.669 14.245 0.721 0.802 0.819 0.836 0.872 S8 18.356 17.356 15.241 13.958 12.689 0.776 0.815 0.853 0.886 0.903 S9 20.162 19.235 18.468 16.753 15.256 0.718 0.754 0.774 0.828 0.842 S10 20.169 21.240 18.655 17.235 15.658 0.716 0.657 0.770 0.795 0.802 S11 21.362 20.109 17.869 15.668 14.245 0.651 0.723 0.782 0.832 0.870 S12 18.623 15.543 13.458 12.487 11.351 0.770 0.843 0.901 0.909 0.914 均值 21.462 19.698 16.504 15.376 13.926 0.710 0.751 0.827 0.844 0.869 标准差 3.297 3.533 2.494 1.925 2.145 0.057 0.072 0.053 0.047 0.049  下载: 导出CSV
下载: 导出CSV
表 2 四种模型的计算复杂度与性能
Table 2 The computational complexity and performance of four models
TCN-LSTM LSTM-KF PUKF-net GPGF-net FLOPs 912186 1219448 719448 699656 Params 320133 342337 256511 245718 推理时间/ms 1.096 1.469 0.865 0.811
下载: 导出CSV
表 3 不同信噪比下的模型性能
Table 3 Model performance under different SNRs
模型 指标 无噪声 SNR=15 dB SNR=10 dB LSTM-KF RMSE 16.504 19.236 21.874 $ {\rm{R}}^{2} $ 0.827 0.752 0.677 GPGF-net RMSE 13.926 15.683 17.721 $ {\rm{R}}^{2} $ 0.869 0.801 0.788
下载: 导出CSV
-
[1] Guo W, Zhao Z, Zhou Z, et al. Hand kinematics, high-density sEMG comprising forearm and far-field potentials for motion intent recognition. Scientific Data, 2025, 12(1): 445 doi: 10.1038/s41597-025-04749-8 [2] Hu F, Qian M, He K, Zhang W A, Yang X. A novel multi-feature fusion network with spatial partitioning strategy and cross-attention for armband-based gesture recognition. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2024, 32: 3878−3890 doi: 10.1109/TNSRE.2024.3487216 [3] 张鋆豪, 何百岳, 杨旭升, 张文安. 基于可穿戴式惯性传感器的人体运动跟踪方法综述. 自动化学报, 2019, 45(8): 1439−1454 doi: 10.16383/j.aas.c180367Zhang Jun-Hao, He Bai-Yue, Yang Xu-Sheng, Zhang Wen-An. A Review on Wearable Inertial Sensor Based Human Motion Tracking. Acta Automatica Sinica, 2019, 45(8): 1439−1454 doi: 10.16383/j.aas.c180367 [4] 李自由, 赵新刚, 张弼, 等. 基于表面肌电的意图识别方法在非理想条件下的研究进展. 自动化学报, 2021, 47(5): 955−969 doi: 10.16383/j.aas.c200263Li Zi-You, Zhao Xingang, Zhang Bi, et al. Review of sEMG-based motion intent recognition methods in non-ideal conditions. Acta Automatica Sinica, 2021, 47(5): 955−969 doi: 10.16383/j.aas.c200263 [5] Buchanan T S, Lloyd D G, Manal K, et al. Neuromusculoskeletal modeling: estimation of muscle forces and joint moments and movements from measurements of neural command. Journal of Applied Biomechanics, 2004, 20(4): 367−395 doi: 10.1123/jab.20.4.367 [6] Sartori M, Reggiani M, Farina D, et al. EMG-driven forward-dynamic estimation of muscle force and joint moment about multiple degrees of freedom in the human lower extremity. PLoS One, 2012, 7(12): e52618 doi: 10.1371/journal.pone.0052618 [7] Zhao Y, Zhang Z, Li Z, et al. An EMG-driven musculoskeletal model for estimating continuous wrist motion. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2020, 28(12): 3113−3120 doi: 10.1109/TNSRE.2020.3038051 [8] Tang G, Sheng J, Wang D, et al. Continuous estimation of human upper limb joint angles by using PSO-LSTM model. IEEE Access, 2020, 9: 17986−17997 doi: 10.1109/access.2020.3047828 [9] 张文安, 林安迪, 杨旭升, 俞立, 杨小牛. 融合深度学习的贝叶斯滤波综述. 自动化学报, 2024, 50(8): 1502−1516 doi: 10.16383/j.aas.c230457Zhang Wen-An, Lin An-Di, Yang Xu-Sheng, Yu Li, Yang Xiao-Niu. A survey on Bayesian filtering with deep learning. Acta Automatica Sinica, 2024, 50(8): 1502−1516 doi: 10.16383/j.aas.c230457 [10] Avian C, Prakosa S W, Faisal M, et al. Estimating finger joint angles on surface EMG using manifold learning and long short-term memory with attention mechanism. Biomedical Signal Processing and Control, 2022, 71: 103099 doi: 10.1016/j.bspc.2021.103099 [11] Zhao D, Ma Y, Meng J, et al. MCR-ALS-based muscle synergy extraction method combined with LSTM neural network for motion intention detection. Frontiers in Neurorobotics, 2023, 17: 1174710 doi: 10.3389/fnbot.2023.1174710 [12] Chen C, Guo W, Ma C, et al. sEMG-based continuous estimation of finger kinematics via large-scale temporal convolutional network. Applied Sciences, 2021, 11(10): 4678 doi: 10.3390/app11104678 [13] Fan J, Zhang K, Huang Y, et al. Parallel spatio-temporal attention-based TCN for multivariate time series prediction. Neural Computing and Applications, 2023, 35(18): 13109−13118 doi: 10.1007/s00521-021-05958-z [14] Hu F, Zhang L, Yang X, Zhang W A. EEG-based driver fatigue detection using spatio-temporal fusion network with brain region partitioning strategy. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(8): 9618−9630 doi: 10.1109/TITS.2023.3348517 [15] Wang F, Liang W, Afzal H M R, et al. Estimation of lower limb joint angles and joint moments during different locomotive activities using the inertial measurement units and a hybrid deep learning model. Sensors, 2023, 23(22): 9039 doi: 10.3390/s23229039 [16] Du J, Liu Z, Dong W, et al. A Novel TCN-LSTM Hybrid Model for sEMG-Based Continuous Estimation of Wrist Joint Angles. Sensors, 2024, 24(17): 5631 doi: 10.3390/s24175631 [17] Han J, Ding Q, Xiong A, et al. A state-space EMG model for the estimation of continuous joint movements. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4267−4275 doi: 10.1109/TIE.2014.2387337 [18] 杨旭升, 吴江宇, 胡佛, 张文安. 基于渐进高斯滤波融合的多视角人体姿态估计. 自动化学报, 2024, 50(3): 607−616 doi: 10.16383/j.aas.c230316Yang Xu-Sheng, Wu Jiang-Yu, Hu Fo, Zhang Wen-An. Multi-view human pose estimation based on progressive Gaussian filtering fusion. Acta Automatica Sinica, 2024, 50(3): 607−616 doi: 10.16383/j.aas.c230316 [19] Yang X, Zhang W A, Yu L. Fractional Kalman filters. Automatica, 2025, 178: 112383 doi: 10.1016/j.automatica.2025.112383 [20] Miao Z, Shi H, Zhang Y, et al. Neural network-aided variational Bayesian adaptive cubature Kalman filtering for nonlinear state estimation. Measurement Science and Technology, 2017, 28(10): 105003 doi: 10.1088/1361-6501/aa7d70 [21] Yang X, Zhang W A, Liu A, et al. Linear fusion estimation for range-only target tracking with nonlinear transformation. IEEE Transactions on Industrial Informatics, 2019, 16(10): 6403−6412 doi: 10.1109/tii.2019.2955931 [22] Coskun H, Achilles F, DiPietro R, et al. Long short-term memory kalman filters: Recurrent neural estimators for pose regularization. Proceedings of the IEEE International Conference on Computer Vision, 20175524−5532 [23] Zhao C, Sun L, Yan Z, et al. Learning Kalman Network: A deep monocular visual odometry for on-road driving. Robotics and Autonomous Systems, 2019, 121: 103234 doi: 10.1016/j.robot.2019.07.004 [24] Liu J, Wang Z, Xu M. DeepMTT: A deep learning maneuvering target-tracking algorithm based on bidirectional LSTM network. Information Fusion, 2020, 53: 289−304 doi: 10.1016/j.inffus.2019.06.012 [25] Yang X, Yin S, Zhang W A, Hu F, Yu L. Asynchronous Gaussian filtering fusion for human motion estimation based on RGB-D cameras. IEEE Sensors Journal, 2023, 23(22): 28044−28054 doi: 10.1109/JSEN.2023.3323869 [26] 杨旭升, 李福祥, 胡佛, 张文安. 基于肌电-惯性融合的人体运动估计: 高斯滤波网络方法. 自动化学报, 2024, 50(5): 991−1000Yang Xu-Sheng, Li Fu-Xiang, Hu Fo, Zhang Wen-An. Human motion estimation based on EMG-inertial fusion: A Gaussian filtering network approach. Acta Automatica Sinica, 2024, 50(5): 991−1000 [27] 杨旭升, 王雪儿, 汪鹏君, 张文安. 基于渐进无迹卡尔曼滤波网络的人体肢体运动估计. 自动化学报, 2023, 49(8): 1723−1731 doi: 10.16383/j.aas.c220523Yang Xu-Sheng, Wang Xue-Er, Wang Peng-Jun, Zhang Wen-An. Estimation of human limb motion based on progressive unscented Kalman filter network. Acta Automatica Sinica, 2023, 49(8): 1723−1731 doi: 10.16383/j.aas.c220523 [28] Yan S, Liang Y, Zheng L, et al. Explainable gated Bayesian recurrent neural network for non-Markov state estimation. IEEE Transactions on Signal Processing, 2024, 72: 4302−4317 doi: 10.1109/TSP.2024.3390139 [29] Julier S, Uhlmann J, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Transactions on Automatic Control, 2000, 45(3): 477−482 doi: 10.1109/9.847726 -

 下载:
下载:

计量
- 文章访问数: 254
- HTML全文浏览量: 191
- 被引次数: 0
