

Formal Logic-based Cooperative Task Planning for Multi-robot Systems: Survey of Recent Advances and Future Directions
-
摘要: 由无人车、无人机等构成的无人集群系统在军民领域有着广泛应用. 任务规划作为集群的决策中枢, 面临时序冲突协调、大规模异构协同以及动态环境适应等多重挑战. 传统的混合整数优化方法在表达灵活性和实时求解方面存在明显不足, 而基于机器学习的规划方法则在可解释性与扩展性上存在固有局限. 近年来, 以线性时序逻辑和信号时序逻辑为代表的形式逻辑方法, 凭借任务描述准确完备、逻辑推理严谨和可解释性强等优势, 已成为集群任务建模与规划的重要手段. 本文系统回顾了基于形式逻辑的集群任务规划研究进展, 围绕基本语法语义、规划架构范式以及大规模和动态不确定环境下的适应机制等方面展开全面分析. 同时, 探讨大语言模型在自然语言任务理解、形式化任务建模及任务规划中的应用潜力. 最后, 展望非完备环境下的持续规划、集群任务与运动的联合规划以及形式逻辑与大语言模型融合的闭环规划等未来研究方向.Abstract: Unmanned swarm systems, composed of ground vehicles, aerial vehicles, and other platforms, have been widely applied in both military and civilian domains. As the decision-making core of the swarm, task planning faces multiple challenges, including temporal conflict coordination, large-scale heterogeneous collaboration, and adaptation to dynamic environments. Traditional mixed-integer optimization methods show clear shortcomings in expressive flexibility and real-time solvability, while planning methods based on machine learning are inherently limited in interpretability and scalability. In recent years, formal logic methods, represented by linear temporal logic and signal temporal logic, have emerged as critical tools for swarm task modeling and planning, owing to their advantages of precise task specification, rigorous logical reasoning, and strong interpretability. This paper systematically reviews research progress on swarm task planning based on formal logic, providing a comprehensive analysis of fundamental syntax and semantics, planning paradigms, and adaptation mechanisms under large-scale and dynamically uncertain environments. It also explores the potential of large language models in natural language task understanding, formalized task modeling and task planning. Finally, future research directions are discussed, including continuous planning under incomplete environments, integrated planning of swarm tasks and motions, and closed-loop planning that combines formal logic with large language models.
-
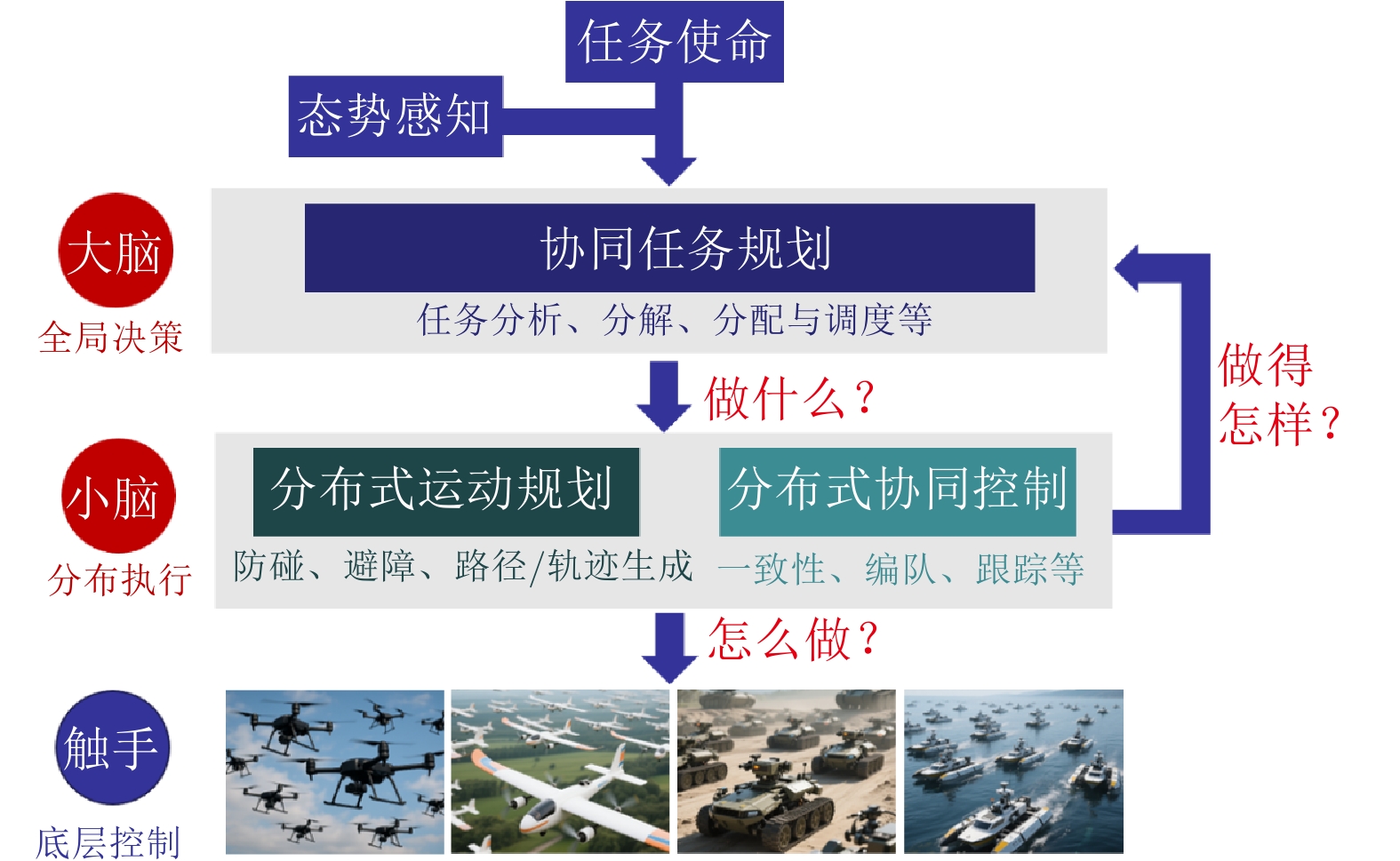
图 1 集群规划与控制的分层架构
Fig. 1 The diagram of hierarchical structure in swarm task planning and control
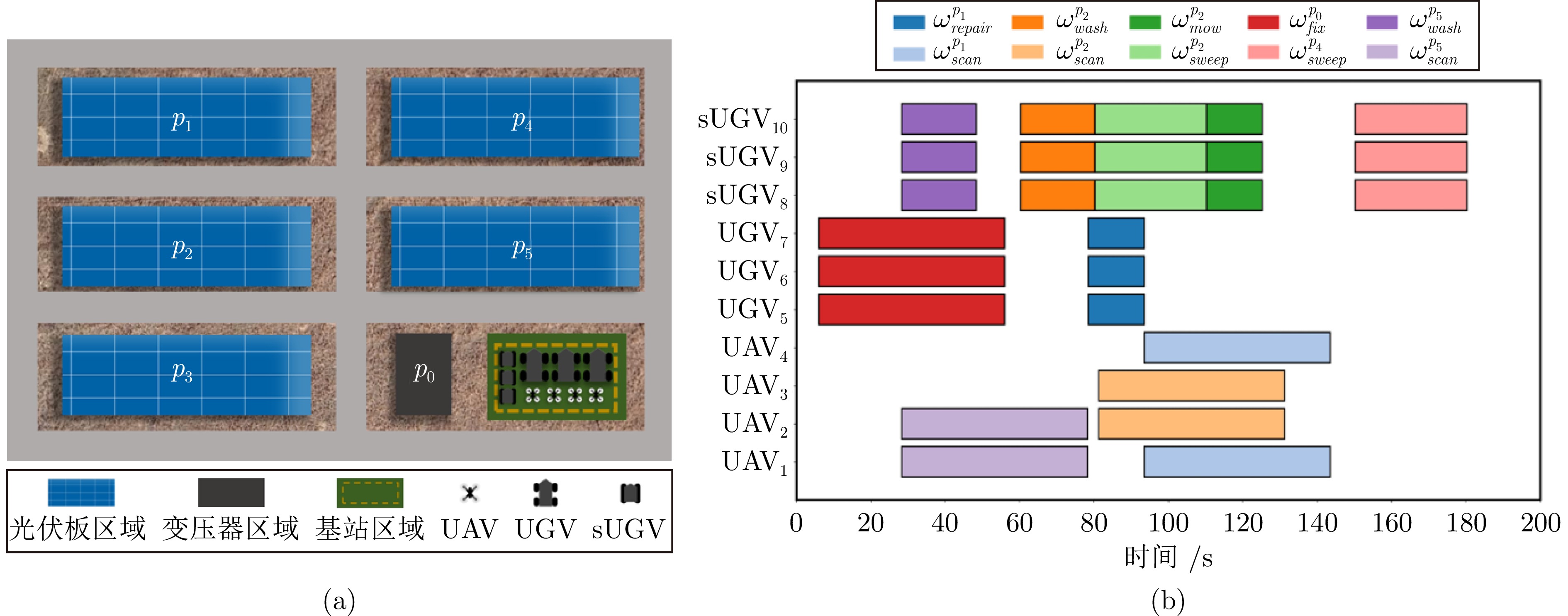
图 3 典型场景及规划结果((a)光伏电站中多机器人维护和协作巡检示例; (b)该场景下多机器人任务规划甘特图)
Fig. 3 Typical scenario and planning results ((a) Example of multi-robot maintenance and collaborative inspection in a photovoltaic power station; (b) Gantt chart of the multi-robot task planning in this scenario)
表 1 集群任务规划典型方法对比
Table 1 Comparison of typical methods for swarm task planning
方法类型 理论基础 优点 局限性 典型适用场景 混合整数优化 运筹优化理论 建模严谨, 可解释性强, 约束表达明确 复杂任务建模难, 变量维度增长快, 计算复杂度高 小规模、静态场景下的任务分配与路径调度 深度学习与大语言模型 深度神经网络、大语言模型 适用于非结构化输入, 推理速度快 可解释性差、数据依赖强, 存在幻觉问题 多模态输入任务、人机交互、语言驱动任务建模 智能优化方法 启发式搜索与群体智能 实现简单、收敛速度快, 可用于近似最优解 缺乏收敛性与解质量理论保障, 易陷入局部最优 无模型、在线优化、多目标或资源受限任务调度 形式逻辑方法 时序逻辑与自动机理论 任务描述完备, 可验证、 可解释, 支持策略合成 空间维数爆炸, 计算复杂度高 安全攸关、强逻辑依赖的集群协同任务规划  下载: 导出CSV
下载: 导出CSV
表 2 基于LTL的集群任务规划方法分类与比较
Table 2 Classification and comparison of LTL-based swarm task planning methods
方法类别 求解框架 适用场景 优势 挑战 乘积图搜索法 离线完全构建[39–43]、局部/滚动时域[44–47]、在线反应式[48–55] 静态或部分已知环境、强逻辑规范、对可验证性要求高的系统 完备性高、规范可解释、适合复杂任务目标、支持自动验证与合成 状态空间爆炸、计算资源需求高、扩展性差、难以实时应对动态环境 约束优化法 混合整数规划[56–60]、可满足性模理论[61–63]、MDP概率优化[64–68]、分布式协调[69–71]等 多目标优化、复杂调度、受限资源管理、小规模任务分配 表达灵活、能处理多目标、软硬约束联合规划、优化性能可调控 变量规模大、求解时间长、实时性与大规模应用受限、建模复杂度高 概率采样法 随机采样[72–77]、无抽象采样[78–80]、感知引导采样[81–82] 高维连续空间、动态或未知环境、大规模动作空间规划 可扩展性强、适应连续高维系统、无需精确建模、适合动态环境探索 样本效率低、收敛性难以严格保证、任务规范满足度依赖启发式设计 学习驱动法 逻辑引导学习[83–86]、策略组合与泛化[87–89]、自适应与理论保证[90–91] 模型未知、环境动态变化、长期任务执行、人机协同场景 泛化能力强、适应性高、可在线优化策略、适合感知驱动场景 可解释性弱、训练稳定性差、规范满足验证难、对样本需求大 任务分解与分层规划法 子自动机分解[92–93]、偏序集与层次划分[94–95]、拟偏序集[38, 96–97] 复杂协作任务、大规模系统、异步任务执行 结构清晰、并行性好、调度效率高、扩展性强、适合大规模集群 在强动态环境下实时性仍有限、分解粒度与规范建模需经验调优
下载: 导出CSV
表 3 基于STL的集群任务规划方法分类与比较
Table 3 Classification and comparison of STL-based swarm task planning methods
方法类别 求解框架 适用场景 优势 挑战 集中优化法 混合整数规划[99−112]、光滑近似[113−119]、随机采样[120−121] 全局任务主导、小规模系统、强逻辑保障需求 形式完备、逻辑表达力强、算法支持成熟 优化变量维数高、实时性和扩展性有限 分布控制法 模型预测控制[99, 122−126]、控制障碍函数[128−134]、预设性能控制[135−140] 局部任务主导、动态环境、分布式实时响应需求 计算效率高、实时性强 对带有全局性的复杂任务建模能力受限 层级规划法 参数凸优化[141−142]、可满足性模理论[143]、假设–保证契约[144−145] 全局任务主导、大规模异构集群系统 分层解耦效率高、并行调度能力强 复杂任务建模能力有限
下载: 导出CSV
表 4 基于LLM的集群任务规划方法分类与比较
Table 4 Classification and comparison of LLM-based swarm task planning methods
方法类别 技术路线 适用场景 优势 挑战 生成式端到端集群任务规划 模型接收态势信息输入直接生成可执行规划方案[157−159] 高实时性响应要求、小规模低安全需求的场景 快速高效解析任务需求, 人工建模设计成本低 高度依赖于模型水平, 难以处理多约束复杂场景, 决策黑箱有安全风险 人机交互式分层集群任务规划 人机交叉验证模型生成的规划方案[160−161] 半结构化、需专家决策的高安全需求环境 使用便捷, 交互友好, 人工干预带来的高容错性 人机接口延迟大, 人工干预依赖决策水平 形式化增强分层集群任务规划 LLM语义解析与形式化方法刚性执行[162−164] 多约束高可靠性要求的大规模复杂场景 不依赖专家知识决策, 动态适应性和可解释性强 LLM幻觉易引发错误, 高动态环境下的实时性挑战
下载: 导出CSV
-
[1] 张振国, 毛建旭, 谭浩然, 王耀南, 张雪波, 江一鸣. 重大装备制造多机器人任务分配与运动规划技术研究综述. 自动化学报, 2024, 50(1): 21−41Zhang Zhen-Guo, Mao Jian-Xu, Tan Hao-Ran, Wang Yao-Nan, Zhang Xue-Bo, Jiang Yi-Ming. A review of task allocation and motion planning for multi-robot in major equipment manufacturing. Acta Automatica Sinica, 2024, 50(1): 21−41 [2] 郝肇铁, 郭斌, 赵凯星, 吴磊, 丁亚三, 李哲涛, 等. 从规则驱动到群智涌现: 多机器人空地协同研究综述. 自动化学报, 2024, 50(10): 1877−1905Hao Zhao-Tie, Guo Bin, Zhao Kai-Xing, Wu Lei, Ding Ya-San, Li Zhe-Tao, et al. From rule-driven to collective intelligence emergence: A review of research on multi-robot air-ground collaboration. Acta Automatica Sinica, 2024, 50(10): 1877−1905 [3] 郭斐然, 张旭辉, 路鹰, 晁鲁静. 无人集群智能任务规划方法研究综述. 无人系统技术, 2024, 7(3): 14−27Guo Fei-Ran, Zhang Xu-Hui, Lu Ying, Chao Lu-Jing. Review of research on intelligent mission planning methods for unmanned swarms. Unmanned Systems Technology, 2024, 7(3): 14−27 [4] 贾永楠, 田似营, 李擎. 无人机集群研究进展综述. 航空学报, 2020, 41(S1): Article No. 723738Jia Yong-Nan, Tian Si-Ying, Li Qing. Recent development of unmanned aerial vehicle swarms. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): Article No. 723738 [5] 杜永浩, 邢立宁, 蔡昭权. 无人飞行器集群智能调度技术综述. 自动化学报, 2020, 46(2): 222−241Du Yong-Hao, Xing Li-Ning, Cai Zhao-Quan. Survey on intelligent scheduling technologies for unmanned flying craft clusters. Acta Automatica Sinica, 2020, 46(2): 222−241 [6] 王建峰, 贾高伟, 郭正, 侯中喜. 多无人机协同任务规划方法研究综述. 系统工程与电子技术, 2024, 46(10): 3437−3450Wang Jian-Feng, Jia Gao-Wei, Guo Zheng, Hou Zhong-Xi. Review of research on multi-UAV collaborative mission planning method. Systems Engineering and Electronics, 2024, 46(10): 3437−3450 [7] 赵健, 张鑫褆, 李佳明, 贺晨. 群体智能2.0研究综述. 计算机工程, 2019, 45(12): 1−7Zhao Jian, Zhang Xin-Ti, Li Jia-Ming, He Chen. Research review of crowd intelligence 2.0. Computer Engineering, 2019, 45(12): 1−7 [8] 孙小玲, 李端. 整数规划新进展. 运筹学学报, 2014, 18(1): 39−68Sun Xiao-Ling, Li Duan. Recent advances in integer programming. Operations Research Transactions, 2014, 18(1): 39−68 [9] 王戟, 詹乃军, 冯新宇, 刘志明. 形式化方法概貌. 软件学报, 2019, 30(1): 33−61Wang Ji, Zhan Nai-Jun, Feng Xin-Yu, Liu Zhi-Ming. Overview of formal methods. Journal of Software, 2019, 30(1): 33−61 [10] Yin X, Gao B Z, Yu X. Formal synthesis of controllers for safety-critical autonomous systems: Developments and challenges. Annual Reviews in Control, 2024, 57: Article No. 100940 doi: 10.1016/j.arcontrol.2024.100940 [11] Rascon J. MeriTalk [Online], available: https://www.meritalk.com/articles/darpa-seeing-payoff-from-formal-methodssecurity-work/, June 5, 2024Rascon J. MeriTalk [Online], available: https://www.meritalk.com/articles/darpa-seeing-payoff-from-formal-methodssecurity-work/, June 5, 2024 [12] Albon C. Defense news [Online], available: https://www.defensenews.com/pentagon/2025/02/21/darpa-touts-formalmethods-for-nipping-cyber-disasters-in-the-bud/, February 21, 2025Albon C. Defense news [Online], available: https://www.defensenews.com/pentagon/2025/02/21/darpa-touts-formalmethods-for-nipping-cyber-disasters-in-the-bud/, February 21, 2025 [13] Guo H H, Wu F, Qin Y C, Li R H, Li K Q, Li K L. Recent trends in task and motion planning for robotics: A survey. ACM Computing Surveys, 2023, 55(13S): Article No. 289 [14] Zhao Z G, Cheng S, Ding Y, Zhou Z Y, Zhang S Q, Xu D F, et al. A survey of optimization-based task and motion planning: From classical to learning approaches. IEEE/ASME Transactions on Mechatronics, 2025, 30(4): 2799−2825 doi: 10.1109/TMECH.2024.3452509 [15] Athira K A, Divya U J, Subramaniam U. A systematic literature review on multi-robot task allocation. ACM Computing Surveys, 2025, 57(3): Article No. 68 [16] Chakraa H, Guérin F, Leclercq E, Lefebvre D. Optimization techniques for multi-robot task allocation problems: Review on the state-of-the-art. Robotics and Autonomous Systems, 2023, 168: Article No. 104492 doi: 10.1016/j.robot.2023.104492 [17] Orthey A, Chamzas C, Kavraki L E. Sampling-based motion planning: A comparative review. Annual Review of Control, Robotics, and Autonomous Systems, 2023, 7: 285−310 [18] Eksioglu B, Vural A V, Reisman A. The vehicle routing problem: A taxonomic review. Computers & Industrial Engineering, 2009, 57(4): 1472−1483 [19] Xiong H G, Shi S Y, Ren D N, Hu J J. A survey of job shop scheduling problem: The types and models. Computers & Operations Research, 2022, 142: Article No. 105731 [20] Liang J, Ban X X, Yu K J, Qu B Y, Qiao K J, Yue C T, el al. A survey on evolutionary constrained multiobjective optimization. IEEE Transactions on Evolutionary Computation, 2023, 27(2): 201−221 doi: 10.1109/TEVC.2022.3155533 [21] Fikes R E, Nilsson N J. Strips: A new approach to the application of theorem proving to problem solving. Artificial Intelligence, 1971, 2(3−4): 189−208 doi: 10.1016/0004-3702(71)90010-5 [22] Erol K, Hendler J, Nau D S. UMCP: A sound and complete procedure for hierarchical task-network planning. In: Proceedings of the 2nd International Conference on Artificial Intelligence Planning Systems. Chicago, USA: AAAI Press, 1994. 249−254 [23] AIPS-98 Planning Competition Committee. PDDL-the Planning Domain Definition Language, Technical Report CVC TR-98-003/DCS TR-1165, Yale Center for Computational Vision and Control, USA, 1998. [24] Kovacs D L. A multi-agent extension of PDDL3.1. In: Proceedings of the 3rd Workshop on the International Planning Competition. Atibaia, Brazil: ICAPS, 2012. 19−37 [25] Pnueli A. The temporal logic of programs. In: Proceedings of the 18th Annual Symposium on Foundations of Computer Science (sfcs 1977). Providence, USA: IEEE, 1977. 46−57 [26] Koymans R. Specifying real-time properties with metric temporal logic. Real-Time Systems, 1990, 2(4): 255−299 doi: 10.1007/BF01995674 [27] Maler O, Nickovic D. Monitoring temporal properties of continuous signals. In: Proceedings of the Joint International Conference on Formal Techniques, Modelling and Analysis of Timed and Fault-tolerant Systems. Grenoble, France: Springer, 2004. 152−166 [28] Clarke E M, Emerson E A. Design and synthesis of synchronization skeletons using branching time temporal logic. In: Proceedings of the Workshop on Logics of Programs. Yorktown Heights, USA: Springer, 1981. 52−71 [29] Baier C, Katoen J P. Principles of Model Checking. Cambridge: The MIT Press, 2008. [30] Firoozi R, Tucker J, Tian S, Majumdar A, Sun J K, Liu W Y, et al. Foundation models in robotics: Applications, challenges, and the future. The International Journal of Robotics Research, 2025, 44(5): 701−739 doi: 10.1177/02783649241281508 [31] Chen Y C, Gandhi R, Zhang Y, Fan C C. NL2TL: Transforming natural languages to temporal logics using large language models. In: Proceedings of the Conference on Empirical Methods in Natural Language Processing. Singapore: Association for Computational Linguistics, 2023. 15880−15903 [32] Huang X, Liu W W, Chen X L, Wang X M, Wang H, Lian D F, et al. Understanding the planning of LLM agents: A survey. arXiv preprint arXiv: 2402.02716v1, 2024. [33] Pnueli A, Rosner R. On the synthesis of a reactive module. In: Proceedings of the 16th ACM SIGPLAN-SIGACT Symposium on Principles of Programming Languages. Austin, USA: ACM, 1989. 179−190 [34] Kupferman O, Vardi M Y. Model checking of safety properties. In: Proceedings of the 11th International Conference on Computer Aided Verification. Trento, Italy: Springer-Verlag, 1999. 172−183 [35] de Giacomo G, Vardi M Y. Linear temporal logic and linear dynamic logic on finite traces. In: Proceedings of the 23rd International Joint Conference on Artificial Intelligence. Beijing, China: AAAI Press, 2013. 854−860 [36] Gastin P, Oddoux D. Fast LTL to Büchi automata translation. In: Proceedings of the 13th International Conference on Computer Aided Verification. Paris, France: Springer, 2001. 53−65 [37] Duret-Lutz A, Lewkowicz A, Fauchille A, Michaud T, Renault É, Xu L. Spot 2.0——A framework for LTL and ${\omega} $-automata manipulation. In: Proceedings of the 14th International Symposium on Automated Technology for Verification and Analysis. Chiba, Japan: Springer, 2016. 122−129 [38] Liu Z S, Guo M, Li Z K. Time minimization and online synchronization for multi-agent systems under collaborative temporal logic tasks. Automatica, 2024, 159: Article No. 111377 doi: 10.1016/j.automatica.2023.111377 [39] Fainekos G E, Kress-Gazit H, Pappas G J. Temporal logic motion planning for mobile robots. In: Proceedings of the IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005. 2020−2025 [40] Fainekos G E, Kress-Gazit H, Pappas G J. Hybrid controllers for path planning: A temporal logic approach. In: Proceedings of the 44th IEEE Conference on Decision and Control. Seville, Spain: IEEE, 2005. 4885−4890 [41] Kress-Gazit H, Fainekos G E, Pappas G J. Translating structured English to robot controllers. Advanced Robotics, 2008, 22(12): 1343−1359 doi: 10.1163/156855308X344864 [42] Ulusoy A, Smith S L, Ding X C, Belta C, Rus D. Optimality and robustness in multi-robot path planning with temporal logic constraints. The International Journal of Robotics Research, 2013, 32(8): 889−911 doi: 10.1177/0278364913487931 [43] 肖云涛, 欧林林, 俞立. 基于线性时序逻辑的最优巡回路径规划. 自动化学报, 2014, 40(10): 2126−2133Xiao Yun-Tao, Ou Lin-Lin, Yu Li. Optimal patrolling path planning via linear temporal logic. Acta Automatica Sinica, 2014, 40(10): 2126−2133 [44] Ayala A I M, Andersson S B, Belta C. Temporal logic motion planning in unknown environments. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 5279−5284 [45] Ulusoy A, Belta C. Receding horizon temporal logic control in dynamic environments. The International Journal of Robotics Research, 2014, 33(12): 1593−1607 doi: 10.1177/0278364914537008 [46] 焦梦甜, 宋运忠. 线性时序逻辑约束下的滚动时域控制路径规划. 智能系统学报, 2020, 15(2): 281−288Jiao Meng-Tian, Song Yun-Zhong. Receding horizon control path planning with linear temporal logic constraints. CAAI Transactions on Intelligent Systems, 2020, 15(2): 281−288 [47] 谢国汕, 殷志宏, 杨一, 李涧青, 李超勇. 基于时序逻辑的复杂环境下无人机运动规划算法. 上海航天(中英文), 2020, 37(6): 69−76Xie Guo-Shan, Yin Zhi-Hong, Yang Yi, Li Jian-Qing, Li Chao-Yong. Temporal logic based algorithm for UAV motion planning in complex environment. Aerospace Shanghai (Chinese & English), 2020, 37(6): 69−76 [48] Kress-Gazit H, Fainekos G E, Pappas G J. Temporal-logic-based reactive mission and motion planning. IEEE Transactions on Robotics, 2009, 25(6): 1370−1381 doi: 10.1109/TRO.2009.2030225 [49] Wolff E M, Topcu U, Murray R M. Efficient reactive controller synthesis for a fragment of linear temporal logic. In: Proceedings of the IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013. 5033−5040 [50] Alonso-Mora J, DeCastro J A, Raman V, Rus D, Kress-Gazit H. Reactive mission and motion planning with deadlock resolution avoiding dynamic obstacles. Autonomous Robots, 2018, 42(4): 801−824 doi: 10.1007/s10514-017-9665-6 [51] Li S, Park D, Sung Y, Shah J A, Roy N. Reactive task and motion planning under temporal logic specifications. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021. 12618−12624 [52] Leahy K, Cristofalo E, Vasile C I, Jones A, Montijano E, Schwager M, et al. Control in belief space with temporal logic specifications using vision-based localization. The International Journal of Robotics Research, 2019, 38(6): 702−722 doi: 10.1177/0278364919846340 [53] Zhou Z L, Chen Z Y, Cai M Y, Li Z J, Kan Z, Su C Y. Vision-based reactive temporal logic motion planning for quadruped robots in unstructured dynamic environments. IEEE Transactions on Industrial Electronics, 2024, 71(6): 5983−5992 doi: 10.1109/TIE.2023.3299048 [54] Zhou Z L, Wang S C, Chen Z Y, Cai M Y, Wang H, Li Z J, et al. Local observation based reactive temporal logic planning of human-robot systems. IEEE Transactions on Automation Science and Engineering, 2025, 22(6): 643−655 [55] Zhao Y, Li Y N, Sentis L, Topcu U, Liu J. Reactive task and motion planning for robust whole-body dynamic locomotion in constrained environments. The International Journal of Robotics Research, 2022, 41(8): 812−847 doi: 10.1177/02783649221077714 [56] Wolff E M, Topcu U, Murray R M. Optimization-based trajectory generation with linear temporal logic specifications. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE, 2014. 5319−5325 [57] Nenchev V, Belta C, Raisch J. Optimal motion planning with temporal logic and switching constraints. In: Proceedings of the European Control Conference (ECC). Linz, Austria: IEEE, 2015. 1141−1146 [58] Zhou Y C, Maity D, Baras J S. Optimal mission planner with timed temporal logic constraints. In: Proceedings of the European Control Conference (ECC). Linz, Austria: IEEE, 2015. 759−764 [59] Kurtz V, Lin H. Temporal logic motion planning with convex optimization via graphs of convex sets. IEEE Transactions on Robotics, 2023, 39(5): 3791−3804 doi: 10.1109/TRO.2023.3291463 [60] 欧林林, 陈浩, 肖云涛, 程诚, 俞立. 满足复杂要求的机器人最优巡回控制系统设计与实现. 控制理论与应用, 2016, 33(2): 172−180Ou Lin-Lin, Chen Hao, Xiao Yun-Tao, Cheng Cheng, Yu Li. Design and implement of optimal patrolling control system to satisfy the complex requirements. Control Theory & Applications, 2016, 33(2): 172−180 [61] Chaudhari P, Wongpiromsarn T, Frazzoli E. Incremental minimum-violation control synthesis for robots interacting with external agents. In: Proceedings of the American Control Conference. Portland, USA: IEEE, 2014. 1761−1768 [62] da Silva R R, Wu B, Lin H. Formal design of robot integrated task and motion planning. In: Proceedings of the 55th IEEE Conference on Decision and Control. Las Vegas, USA: IEEE, 2016. 6589−6594 [63] Zhao Y, Topcu U, Sentis L. High-level planner synthesis for whole-body locomotion in unstructured environments. In: Proceedings of the 55th IEEE Conference on Decision and Control. Las Vegas, USA: IEEE, 2016. 6557−6564 [64] Lacerda B, Parker D, Hawes N. Optimal and dynamic planning for Markov decision processes with co-safe LTL specifications. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 1511−1516 [65] Nikou A, Tumova J, Dimarogonas D V. Probabilistic plan synthesis for coupled multi-agent systems. IFAC-PapersOnLine, 2017, 50(1): 10766−10771 doi: 10.1016/j.ifacol.2017.08.2280 [66] Guo M, Zavlanos M M. Probabilistic motion planning under temporal tasks and soft constraints. IEEE Transactions on Automatic Control, 2018, 63(12): 4051−4066 doi: 10.1109/TAC.2018.2799561 [67] 陈仲瑶, 方浩. 基于线性时序逻辑的智能体不确定行为规划. 中国科学: 技术科学, 2020, 50(5): 516−525 doi: 10.1360/SST-2019-0292Chen Zhong-Yao, Fang Hao. Probabilistic action planning based on linear temporal logic. SCIENTIA SINICA Technologica, 2020, 50(5): 516−525 doi: 10.1360/SST-2019-0292 [68] Ding X C, Pinto A, Surana A. Strategic planning under uncertainties via constrained Markov decision processes. In: Proceedings of the IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013. 4568−4575 [69] Guo M, Zavlanos M M. Multirobot data gathering under buffer constraints and intermittent communication. IEEE Transactions on Robotics, 2018, 34(4): 1082−1097 doi: 10.1109/TRO.2018.2830370 [70] Wang J J, Guo M, Li Z K. Multi-agent coordination under temporal logic tasks and team-wise intermittent communication. In: Proceedings of the 62nd IEEE Conference on Decision and Control (CDC). Singapore: IEEE, 2023. 3174−3179 [71] Kalluraya S, Pappas G J, Kantaros Y. Resilient temporal logic planning in the presence of robot failures. In: Proceedings of the 62nd IEEE Conference on Decision and Control (CDC). Singapore: IEEE, 2023. 7520−7526 [72] Bhatia A, Kavraki L E, Vardi M Y. Sampling-based motion planning with temporal goals. In: Proceedings of the IEEE International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. 2689−2696 [73] Vasile C I, Belta C. Sampling-based temporal logic path planning. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 4817−4822 [74] Plaku E. Path planning with probabilistic roadmaps and co-safe linear temporal logic. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve, Portugal: IEEE, 2012. 2269−2275 [75] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning with deterministic ${ \mu} $-calculus specifications. In: Proceedings of the American Control Conference (ACC). Montreal, Canada: IEEE, 2012. 735−742 [76] McMahon J, Plaku E. Sampling-based tree search with discrete abstractions for motion planning with dynamics and temporal logic. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, USA: IEEE, 2014. 3726−3733 [77] He K L, Lahijanian M, Kavraki L E, Vardi M Y. Towards manipulation planning with temporal logic specifications. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Seattle, USA: IEEE, 2015. 346−352 [78] Kantaros Y, Zavlanos M M. Sampling-based optimal control synthesis for multirobot systems under global temporal tasks. IEEE Transactions on Automatic Control, 2019, 64(5): 1916−1931 doi: 10.1109/TAC.2018.2853558 [79] Kantaros Y, Zavlanos M M. STyLuS*: A temporal logic optimal control synthesis algorithm for large-scale multi-robot systems. The International Journal of Robotics Research, 2020, 39(7): 812−836 doi: 10.1177/0278364920913922 [80] Luo X S, Kantaros Y, Zavlanos M M. An abstraction-free method for multirobot temporal logic optimal control synthesis. IEEE Transactions on Robotics, 2021, 37(5): 1487−1507 doi: 10.1109/TRO.2021.3061983 [81] Ho Q H, Sunberg Z N, Lahijanian M. Planning with SiMBA: Motion planning under uncertainty for temporal goals using simplified belief guides. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, UK: IEEE, 2023. 5723−5729 [82] Kantaros Y, Kalluraya S, Jin Q, Pappas G J. Perception-based temporal logic planning in uncertain semantic maps. IEEE Transactions on Robotics, 2022, 38(4): 2536−2556 doi: 10.1109/TRO.2022.3144073 [83] Toro Icarte R, Klassen T Q, Valenzano R, McIlraith S A. Teaching multiple tasks to an RL agent using LTL. In: Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems. Stockholm, Sweden: International Foundation for Autonomous Agents and Multiagent Systems, 2018. 452−461 [84] Li X, Serlin Z, Yang G, Belta C. A formal methods approach to interpretable reinforcement learning for robotic planning. Science Robotics, 2019, 4(37): Article No. eaay6276 doi: 10.1126/scirobotics.aay6276 [85] Cai M Y, Xiao S P, Kan Z. Reinforcement learning based temporal logic control with soft constraints using limit-deterministic generalized Büchi automata. arXiv preprint arXiv: 2101.10284, 2021. [86] 李保罗, 蔡明钰, 阚震. 线性时序逻辑引导的安全强化学习. 控制与决策, 2023, 38(7): 1835−1844Li Bao-Luo, Cai Ming-Yu, Kan Zhen. Linear temporal logic guided safe reinforcement learning. Control and Decision, 2023, 38(7): 1835−1844 [87] Vaezipoor P, Li A C, Toro Icarte R, McIlraith S A. LTL2Action: Generalizing LTL instructions for multi-task RL. In: Proceedings of the 38th International Conference on Machine Learning. Virtual Event: PMLR, 2021. 10497−10508Vaezipoor P, Li A C, Toro Icarte R, McIlraith S A. LTL2Action: Generalizing LTL instructions for multi-task RL. In: Proceedings of the 38th International Conference on Machine Learning. Virtual Event: PMLR, 2021. 10497−10508 [88] Bergeron T, Serlin Z, Leahy K. Comp-LTL: Temporal logic planning via zero-shot policy composition. arXiv preprint arXiv: 2408.04215, 2024. [89] Jackermeier M, Abate A. DeepLTL: Learning to efficiently satisfy complex LTL specifications. arXiv preprint arXiv: 2410.04631, 2024. [90] Voloshin C, Le H M, Chaudhuri S, Yue Y S. Policy optimization with linear temporal logic constraints. In: Proceedings of the 36th International Conference on Neural Information Processing Systems. New Orleans, USA: Curran Associates Inc., 2022. Article No. 1286 [91] Hatanaka W, Yamashina R, Matsubara T. Reinforcement learning of action and query policies with LTL instructions under uncertain event detector. IEEE Robotics and Automation Letters, 2023, 8(11): 7010−7017 doi: 10.1109/LRA.2023.3313969 [92] Schillinger P, Bürger M, Dimarogonas D V. Decomposition of finite LTL specifications for efficient multi-agent planning. Distributed Autonomous Robotic Systems: The 13th International Symposium. Cham: Springer, 2018. 253−267 [93] Schillinger P, Bürger M, Dimarogonas D V. Simultaneous task allocation and planning for temporal logic goals in heterogeneous multi-robot systems. The International Journal of Robotics Research, 2018, 37(7): 818−838 doi: 10.1177/0278364918774135 [94] Luo X S, Zavlanos M M. Temporal logic task allocation in heterogeneous multirobot system. IEEE Transactions on Robotics, 2022, 38(6): 3602−3621 doi: 10.1109/TRO.2022.3181948 [95] Luo X S, Xu S J, Liu R X, Liu C L. Decomposition-based hierarchical task allocation and planning for multi-robots under hierarchical temporal logic specifications. IEEE Robotics and Automation Letters, 2024, 9(8): 7182−7189 doi: 10.1109/LRA.2024.3412589 [96] Liu Z S, Guo M, Bao W M, Li Z K. Fast and adaptive multi-agent planning under collaborative temporal logic tasks via poset products. Research, 2024, 7: Article No. 0337 [97] 刘泽森, 李忠奎, 国萌. 基于动作链的形式化任务协同规划. 中国科学: 信息科学, 2024, 54(11): 2623−2641 doi: 10.1360/SSI-2024-0105Liu Ze-Sen, Li Zhong-Kui, Guo Meng. Collaborative planning of formal tasks based on action chains. SCIENTIA SINICA Informationis, 2024, 54(11): 2623−2641 doi: 10.1360/SSI-2024-0105 [98] Belta C, Sadraddini S. Formal methods for control synthesis: An optimization perspective. Annual Review of Control, Robotics, and Autonomous Systems, 2019, 2(1): 115−140 doi: 10.1146/annurev-control-053018-023717 [99] Raman V, Donzé A, Maasoumy M, Murray R M, Sangiovanni-Vincentelli A, Seshia S A. Model predictive control with signal temporal logic specifications. In: Proceedings of the 53rd IEEE Conference on Decision and Control. Los Angeles, USA: IEEE, 2014. 81−87 [100] Sadraddini S, Belta C. Formal synthesis of control strategies for positive monotone systems. IEEE Transactions on Automatic Control, 2019, 64(2): 480−495 [101] Kurtz V, Lin H. Mixed-integer programming for signal temporal logic with fewer binary variables. IEEE Control Systems Letters, 2022, 6: 2635−2640 doi: 10.1109/LCSYS.2022.3172857 [102] Sun D W, Chen J K, Mitra S, Fan C C. Multi-agent motion planning from signal temporal logic specifications. IEEE Robotics and Automation Letters, 2022, 7(2): 3451−3458 doi: 10.1109/LRA.2022.3146951 [103] Verhagen J, Lindemann L, Tumova J. Temporally robust multi-agent STL motion planning in continuous time. In: Proceedings of the American Control Conference. Toronto, Canada: IEEE, 2024. 251−258 [104] Zhang Z J, Sun Z Y, Haesaert S. Intention-aware control based on belief-space specifications and stochastic expansion. IEEE Transactions on Intelligent Vehicles, 2025, 10(3): 1989−1998 doi: 10.1109/TIV.2024.3441315 [105] Aasi E, Cai M Y, Vasile C I, Belta C. A two-level control algorithm for autonomous driving in urban environments. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(1): 410−424 doi: 10.1109/TITS.2024.3486557 [106] Khanna P, Fredberg J, Björkman M, Smith C, Linard A. Hand it to me formally! Data-driven control for human-robot handovers with signal temporal logic. IEEE Robotics and Automation Letters, 2024, 9(10): 9039−9046 doi: 10.1109/LRA.2024.3447476 [107] Gu Z Y, Guo R M, Yates W, Chen Y P, Zhao Y Y, Zhao Y. Walking-by-logic: Signal temporal logic-guided model predictive control for bipedal locomotion resilient to external perturbations. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. 1121−1127 [108] Haghighi I, Sadraddini S, Belta C. Robotic swarm control from spatio-temporal specifications. In: Proceedings of the 55th IEEE Conference on Decision and Control (CDC). Las Vegas, USA: IEEE, 2016. 5708−5713 [109] Jones A M, Leahy K, Vasile C, Sadraddini S, Serlin Z, Tron R, et al. ScRATCHS: Scalable and robust algorithms for task-based coordination from high-level specifications. Robotics Research: The 19th International Symposium ISRR. Cham: Springer, 2019. 224−241 [110] Leahy K, Serlin Z, Vasile C I, Schoer A, Jones A M, Tron R, et al. Scalable and robust algorithms for task-based coordination from high-level specifications (ScRATCHeS). IEEE Transactions on Robotics, 2022, 38(4): 2516−2535 doi: 10.1109/TRO.2021.3130794 [111] Liang K, Cardona G A, Vasile C I. An iterative approach for heterogeneous multi-agent route planning with temporal logic goals and travel duration uncertainty. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. 257−263 [112] Buyukkocak A T, Aksaray D, Yazcoglu Y. Planning of heterogeneous multi-agent systems under signal temporal logic specifications with integral predicates. IEEE Robotics and Automation Letters, 2021, 6(2): 1375−1382 doi: 10.1109/LRA.2021.3057049 [113] Gilpin Y, Kurtz V, Lin H. A smooth robustness measure of signal temporal logic for symbolic control. IEEE Control Systems Letters, 2021, 5(1): 241−246 doi: 10.1109/LCSYS.2020.3001875 [114] Mehdipour N, Vasile C I, Belta C. Arithmetic-geometric mean robustness for control from signal temporal logic specifications. In: Proceedings of the American Control Conference (ACC). Philadelphia, USA: IEEE, 2019. 1690−1695 [115] Pant Y V, Abbas H, Mangharam R. Smooth operator: Control using the smooth robustness of temporal logic. In: Proceedings of the IEEE Conference on Control Technology and Applications (CCTA). Maui, USA: IEEE, 2017. 1235−1240 [116] Leung K, Aréchiga N, Pavone M. Backpropagation through signal temporal logic specifications: Infusing logical structure into gradient-based methods. The International Journal of Robotics Research, 2023, 42(6): 356−370 doi: 10.1177/02783649221082115 [117] Silano G, Baca T, Penicka R, Liuzza D, Saska M. Power line inspection tasks with multi-aerial robot systems via signal temporal logic specifications. IEEE Robotics and Automation Letters, 2021, 6(2): 4169−4176 doi: 10.1109/LRA.2021.3068114 [118] Silano G, Afifi A, Saska M, Franchi A. A signal temporal logic planner for ergonomic human-robot collaboration. In: Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS). Warsaw, Poland: IEEE, 2023. 328−335 [119] Silano G, Caballero A, Liuzza D, Iannelli L, Bogdan S, Saska M. A signal temporal logic approach for task-based coordination of multi-aerial systems: A wind turbine inspection case study. Robotics and Autonomous Systems, 2025, 186: Article No. 104905 doi: 10.1016/j.robot.2024.104905 [120] Vasile C I, Raman V, Karaman S. Sampling-based synthesis of maximally-satisfying controllers for temporal logic specifications. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 3840−3847 [121] Sewlia M, Verginis C K, Dimarogonas D V. Cooperative sampling-based motion planning under signal temporal logic specifications. In: Proceedings of the American Control Conference (ACC). San Diego, USA: IEEE, 2023. 2697−2702 [122] Liu Z Y, Wu B, Dai J, Lin H. Distributed communication-aware motion planning for multi-agent systems from STL and SpaTeL specifications. In: Proceedings of the 56th IEEE Annual Conference on Decision and Control (CDC). Melbourne, Australia: IEEE, 2017. 4452−4457 [123] Zhou X Y, Zou Y Y, Li S Y, Li X W, Fang H. Distributed model predictive control for multi-robot systems with conflicting signal temporal logic tasks. IET Control Theory & Applications, 2022, 16(5): 554−572 [124] Zhou X Y, Yang T G, Zou Y Y, Li S Y, Fang H. Multiple subformulae cooperative control for multiagent systems under conflicting signal temporal logic tasks. IEEE Transactions on Industrial Electronics, 2023, 70(9): 9357−9367 doi: 10.1109/TIE.2022.3215812 [125] Yang T G, Zou Y Y, Li S Y, Yang Y R. Distributed model predictive control for probabilistic signal temporal logic specifications. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 6239−6249 doi: 10.1109/TASE.2023.3323472 [126] Charitidou M, Dimarogonas D V. Distributed MPC with continuous-time STL constraint satisfaction guarantees. IEEE Control Systems Letters, 2024, 8: 211−216 doi: 10.1109/LCSYS.2024.3361971 [127] 陈杰, 吕梓亮, 黄鑫源, 洪奕光. 非线性系统的安全分析与控制: 障碍函数方法. 自动化学报, 2023, 49(3): 567−579Chen Jie, Lv Zi-Liang, Huang Xin-Yuan, Hong Yi-Guang. Safety analysis and safety-critical control of nonlinear systems: Barrier function approach. Acta Automatica Sinica, 2023, 49(3): 567−579 [128] Lindemann L, Dimarogonas D V. Control barrier functions for signal temporal logic tasks. IEEE Control Systems Letters, 2019, 3(1): 96−101 doi: 10.1109/LCSYS.2018.2853182 [129] Yang G, Belta C, Tron R. Continuous-time signal temporal logic planning with control barrier functions. In: Proceedings of the American Control Conference (ACC). Denver, USA: IEEE, 2020. 4612−4618 [130] Xiao W, Belta C A, Cassandras C G. High order control Lyapunov-barrier functions for temporal logic specifications. In: Proceedings of the American Control Conference (ACC). New Orleans, USA: IEEE, 2021. 4886−4891 [131] Charitidou M, Dimarogonas D V. Receding horizon control with online barrier function design under signal temporal logic specifications. IEEE Transactions on Automatic Control, 2023, 68(6): 3545−3556 doi: 10.1109/TAC.2022.3195470 [132] Wiltz A, Dimarogonas D V. Handling disjunctions in signal temporal logic based control through nonsmooth barrier functions. In: Proceedings of the 61st IEEE Conference on Decision and Control (CDC). Cancun, Mexico: IEEE, 2022. 3237−3242 [133] Gundana D, Kress-Gazit H. Event-based signal temporal logic synthesis for single and multi-robot tasks. IEEE Robotics and Automation Letters, 2021, 6(2): 3687−3694 doi: 10.1109/LRA.2021.3064220 [134] Zhang Y X, Fernandez-Ayala V N, Dimarogonas D V. Multi-robot human-in-the-loop control under spatiotemporal specifications. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. 4841−4847 [135] Bechlioulis C P, Rovithakis G A. Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica, 2009, 45(2): 532−538 doi: 10.1016/j.automatica.2008.08.012 [136] Lindemann L, Verginis C K, Dimarogonas D V. Prescribed performance control for signal temporal logic specifications. In: Proceedings of the 56th IEEE Annual Conference on Decision and Control (CDC). Melbourne, Australia: IEEE, 2017. 2997−3002 [137] Sewlia M, Verginis C K, Dimarogonas D V. Cooperative object manipulation under signal temporal logic tasks and uncertain dynamics. IEEE Robotics and Automation Letters, 2022, 7(4): 11561−11568 doi: 10.1109/LRA.2022.3200760 [138] Lindemann L, Dimarogonas D V. Feedback control strategies for multi-agent systems under a fragment of signal temporal logic tasks. Automatica, 2019, 106: 284−293 doi: 10.1016/j.automatica.2019.05.013 [139] Varnai P, Dimarogonas D V. Prescribed performance control guided policy improvement for satisfying signal temporal logic tasks. In: Proceedings of the American Control Conference (ACC). Philadelphia, USA: IEEE, 2019. 286−291 [140] Long L J, Gao G. Dynamic event-triggered prescribed performance control for nonlinear systems with signal temporal logic. International Journal of Robust and Nonlinear Control, 2024, 34(7): 4753−4768 doi: 10.1002/rnc.7226 [141] Charitidou M, Dimarogonas D V. Signal temporal logic task decomposition via convex optimization. IEEE Control Systems Letters, 2022, 6: 1238−1243 doi: 10.1109/LCSYS.2021.3090980 [142] Marchesini G, Liu S Y, Lindemann L, Dimarogonas D V. Communication-constrained STL task decomposition through convex optimization. In: Proceedings of the American Control Conference (ACC). Toronto, Canada: IEEE, 2024. 3517−3523 [143] Leahy K, Jones A, Vasile C I. Fast decomposition of temporal logic specifications for heterogeneous teams. IEEE Robotics and Automation Letters, 2022, 7(2): 2297−2304 doi: 10.1109/LRA.2022.3143304 [144] Ghasemi K, Sadraddini S, Belta C. Decentralized signal temporal logic control for perturbed interconnected systems via assume-guarantee contract optimization. In: Proceedings of the 61st IEEE Conference on Decision and Control (CDC). Cancun, Mexico: IEEE, 2022. 5226−5231 [145] Liu S Y, Saoud A, Dimarogonas D V. Controller synthesis of collaborative signal temporal logic tasks for multiagent systems via assume-guarantee contracts. IEEE Transactions on Automatic Control, 2025, 70(9): 5894−5909 doi: 10.1109/TAC.2025.3549288 [146] Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez A N, et al. Attention is all you need. In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: Curran Associates, Inc., 2017. 6000−6010 [147] Radford A, Narasimhan K, Salimans T, Sutskever I. Improving Language Understanding by Generative Pre-training, Technical Report, OpenAI, USA, 2018. [148] Devlin J, Chang M W, Lee K, Toutanova K. BERT: Pre-training of deep bidirectional Transformers for language understanding. In: Proceedings of the Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, Volume 1 (Long and Short Papers). Minneapolis, USA: Association for Computational Linguistics, 2019. 4171−4186 [149] Guo D Y, Yang D J, Zhang H W, Song J X, Zhang R Y, Xu R X, et al. DeepSeek-R1: Incentivizing reasoning capability in LLMs via reinforcement learning. arXiv preprint arXiv: 2501.12948, 2025. [150] Plaat A, Wong A N, Verberne S, Broekens J, van Stein N, Bäck T. Reasoning with large language models: A survey. arXiv preprint arXiv: 2407.11511, 2024. [151] Birr T, Pohl C, Younes A, Asfour T. AutoGPT+P: Affordance-based task planning using large language models. In: Proceedings of the Robotics: Science and Systems. Delft, Netherlands: RSS Foundation, 2024. 1−16 [152] Hao Y L, Chen Y C, Zhang Y, Fan C C. Large language models can solve real-world planning rigorously with formal verification tools. In: Proceedings of the Conference of the Nations of the Americas Chapter of the Association for Computational Linguistics: Human Language Technologies (Volume 1: Long Papers). Albuquerque, USA: Association for Computational Linguistics, 2025. 3434−3483 [153] 王文晟, 谭宁, 黄凯, 张雨浓, 郑伟诗, 孙富春. 基于大模型的具身智能系统综述. 自动化学报, 2025, 51(1): 1−19Wang Wen-Sheng, Tan Ning, Huang Kai, Zhang Yu-Nong, Zheng Wei-Shi, Sun Fu-Chun. Embodied intelligence systems based on large models: A survey. Acta Automatica Sinica, 2025, 51(1): 1−19 [154] Xu Y L F, Feng J C, Miao W K. Learning from failures: Translation of natural language requirements into linear temporal logic with large language models. In: Proceedings of the 24th IEEE International Conference on Software Quality, Reliability and Security. Cambridge, UK: IEEE, 2024. 204−215 [155] Cosler M, Hahn C, Mendoza D, Schmitt F, Trippel C. nl2Spec: Interactively translating unstructured natural language to temporal logics with large language models. In: Proceedings of the 35th International Conference on Computer Aided Verification. Paris, France: Springer, 2023. 383−396 [156] Pan J Y, Chou G, Berenson D. Data-efficient learning of natural language to linear temporal logic translators for robot task specification. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, UK: IEEE, 2024. 11554−11561 [157] Huang W L, Abbeel P, Pathak D, Mordatch I. Language models as zero-shot planners: Extracting actionable knowledge for embodied agents. In: Proceedings of the 39th International Conference on Machine Learning. Baltimore, USA: PMLR, 2022. 9118−9147 [158] Ichter B, Brohan A, Chebotar Y, Finn C, Hausman K, Herzog A, et al. Do as I can, not as I say: Grounding language in robotic affordances. In: Proceedings of the 6th Conference on Robot Learning. Auckland, New Zealand: PMLR, 2022. 287−318 [159] Silver T, Dan S, Srinivas K, Tenenbaum J B, Kaelbling L, Katz M. Generalized planning in PDDL domains with pretrained large language models. In: Proceedings of the 38th AAAI Conference on Artificial Intelligence. Vancouver, Canada: AAAI Press, 2024. 20256−20264 [160] 秦龙, 武万森, 刘丹, 胡越, 尹全军, 阳东升, 等. 基于大语言模型的复杂任务自主规划处理框架. 自动化学报, 2024, 50(4): 862−872Qin Long, Wu Wan-Sen, Liu Dan, Hu Yue, Yin Quan-Jun, Yang Dong-Sheng, et al. Autonomous planning and processing framework for complex tasks based on large language models. Acta Automatica Sinica, 2024, 50(4): 862−872 [161] Liu H K, Zhu Y N, Kato K, Kondo I, Aoyama T, Hasegawa Y. LLM-based human-robot collaboration framework for manipulation tasks. arXiv preprint arXiv: 2308.14972, 2023. [162] van de Laar T, Zhang Z J, Qi S H, Haesaert S, Sun Z Y. VernaCopter: Disambiguated natural-language-driven robot via formal specifications. arXiv preprint arXiv: 2409.09536, 2024. [163] Zhao M D, Jain S, Song S R. RoCo: Dialectic multi-robot collaboration with large language models. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. 286−299 [164] Zhu Y X, Chen J F, Zhang X T, Guo M, Li Z K. DEXTER-LLM: Dynamic and explainable coordination of multi-robot systems in unknown environments via large language models. arXiv preprint arXiv: 2508.14387, 2025. -

 下载:
下载:

计量
- 文章访问数: 6312
- HTML全文浏览量: 2176
- PDF下载量: 562
- 被引次数: 0
