

A Multi-stage Robust Optimization Guidance Method for Endoatmospheric Powered Descent of Reusable Rockets
-
摘要: 针对大气层内可回收火箭的动力下降问题, 提出一种多阶段的鲁棒优化(Robust optimization, RO)方法. 由于大气层内存在未知风场, 如何在火箭下降段考虑这种不确定性具有十分重要的意义. 首先, 建立一个关于高度的不确定风场模型, 在该风场下给出火箭动力下降的鲁棒最优控制问题. 为了求解该问题, 使用一种对不等式约束采取一阶近似并将一阶项作为安全裕量加入约束的鲁棒优化方法, 得到一个可以求解的单阶段鲁棒优化算法. 其次, 定量给出安全裕量的上界, 基于该上界提出一种多阶段鲁棒优化算法, 避免单阶段鲁棒优化算法中安全裕量可能过大导致无法求解的问题. 最后, 通过仿真对比各个算法在多个实际风场下的性能, 结果表明所提出的多阶段鲁棒优化方法同时具有较高的落点精度和对于不同风场的鲁棒性.Abstract: This paper proposes a multi-stage robust optimization (RO) method for the endoatmospheric powered descent problem of reusable rockets. Due to the unknown wind field in the atmosphere, it is of great significance to consider this uncertainty during the rocket descent phase. Firstly, a model of uncertain wind field with respect to altitude is established, and a robust optimal control problem for rocket powered descent is formulated under this wind field. To solve this problem, a tractable single-stage RO algorithm is developed by approximating the inequality constraints using a first-order expansion and incorporating the first-order term as a safety margin. Secondly, an upper bound on the safety margin is quantitatively derived. Based on this upper bound, a multi-stage RO algorithm is proposed, which avoids the infeasibility problem caused by the excessively large safety margin in the single-stage RO algorithm. Finally, simulation results are presented to compare the performance of each algorithm under various actual wind fields. The results demonstrate that the proposed multi-stage RO method achieves both high landing accuracy and robustness against different wind fields.
-
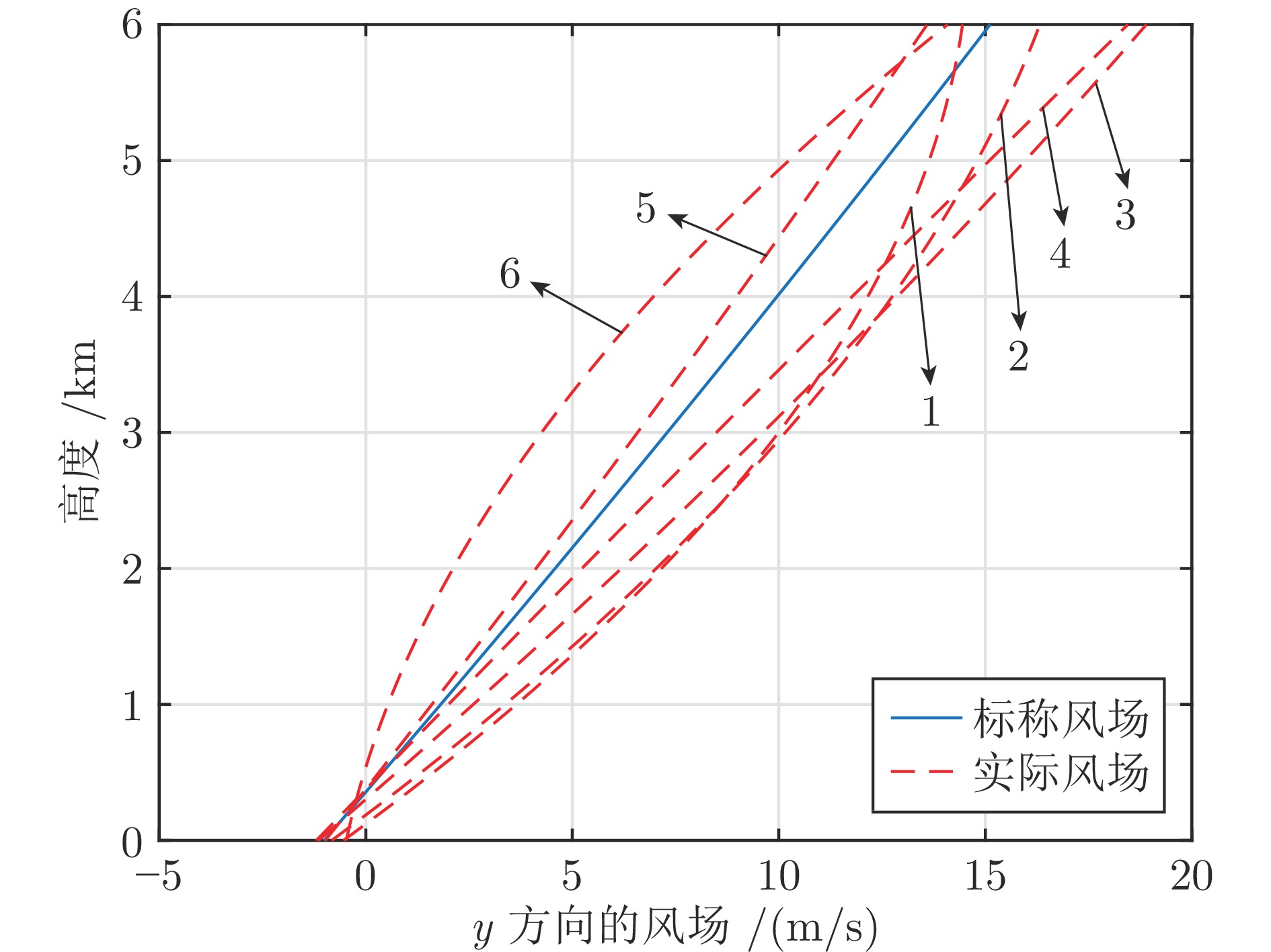
图 2 $ y$轴的六个实际风场和一个标称风场
Fig. 2 Six actual wind fields and one nominal wind field on the y-axis
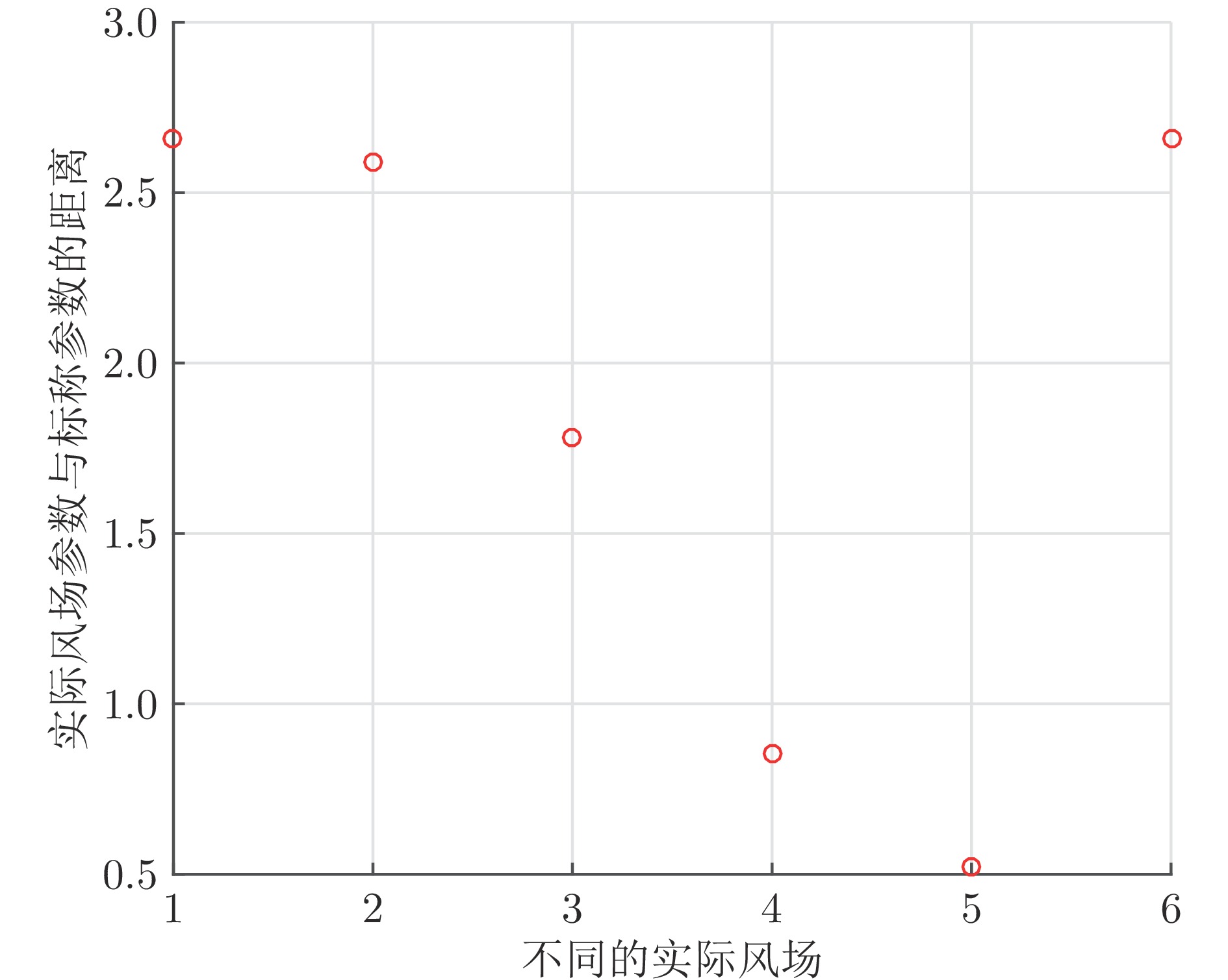
图 3 实际风场参数与标称风场参数的距离
Fig. 3 Distances between parameters of actual wind fields and parameters of nominal wind field
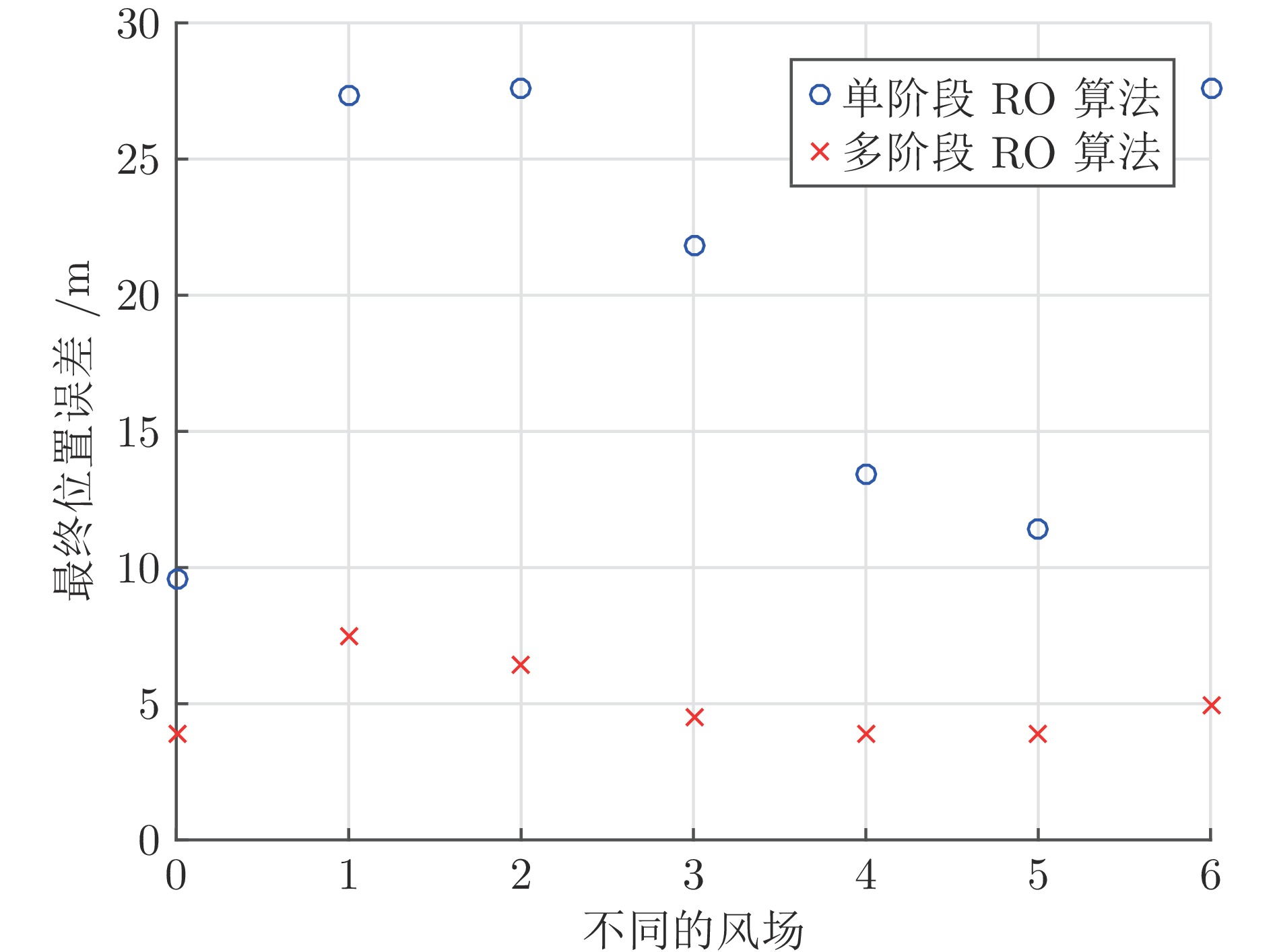
图 5 单阶段RO算法和多阶段RO算法在不同风场下的最终位置误差
Fig. 5 The terminal position errors of single-stage RO algorithm and multi-stage RO algorithm under different wind fields
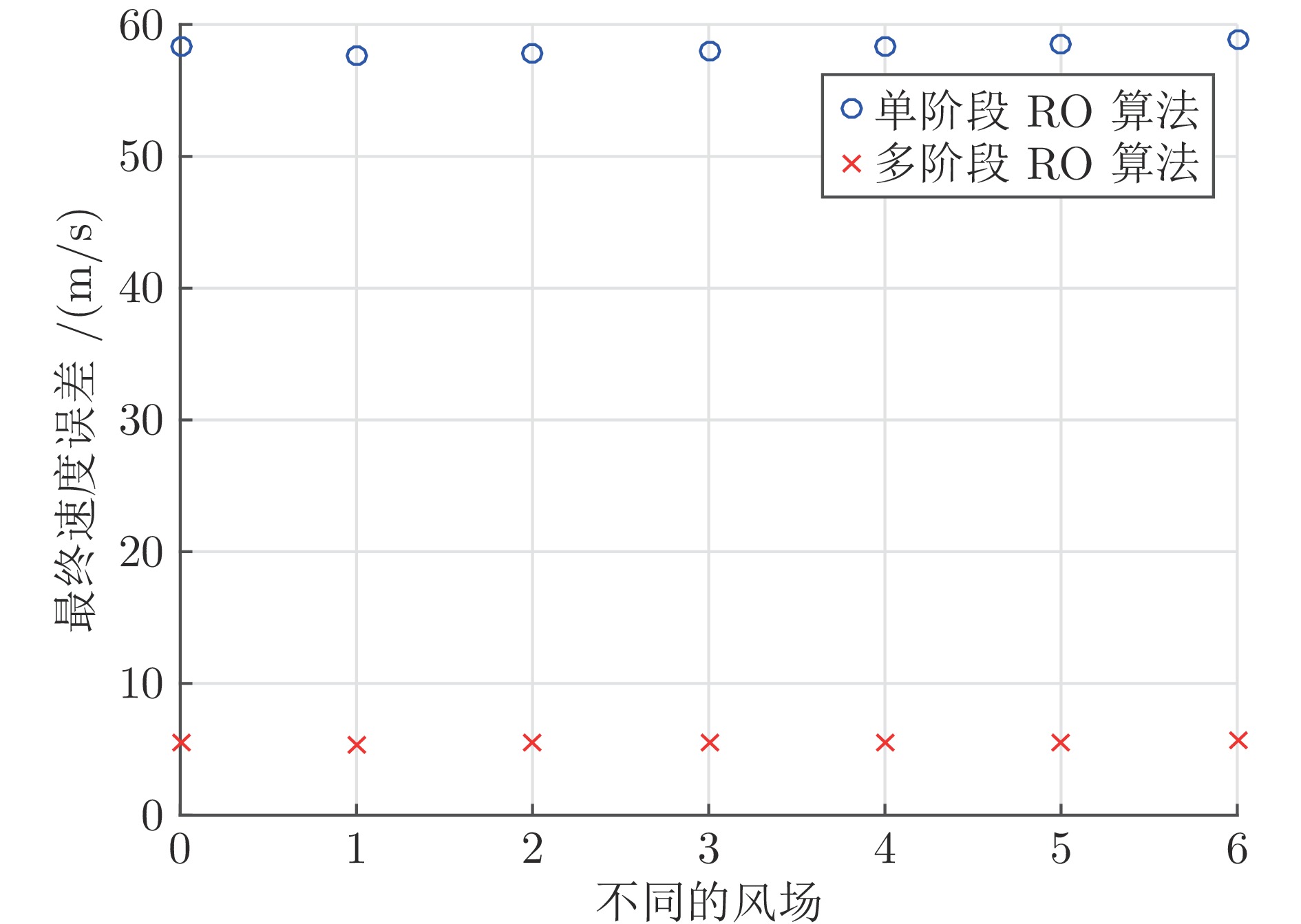
图 6 单阶段RO算法和多阶段RO算法在不同风场下的最终速度误差
Fig. 6 The terminal velocity errors of single-stage RO algorithm and multi-stage RO algorithm under different wind fields
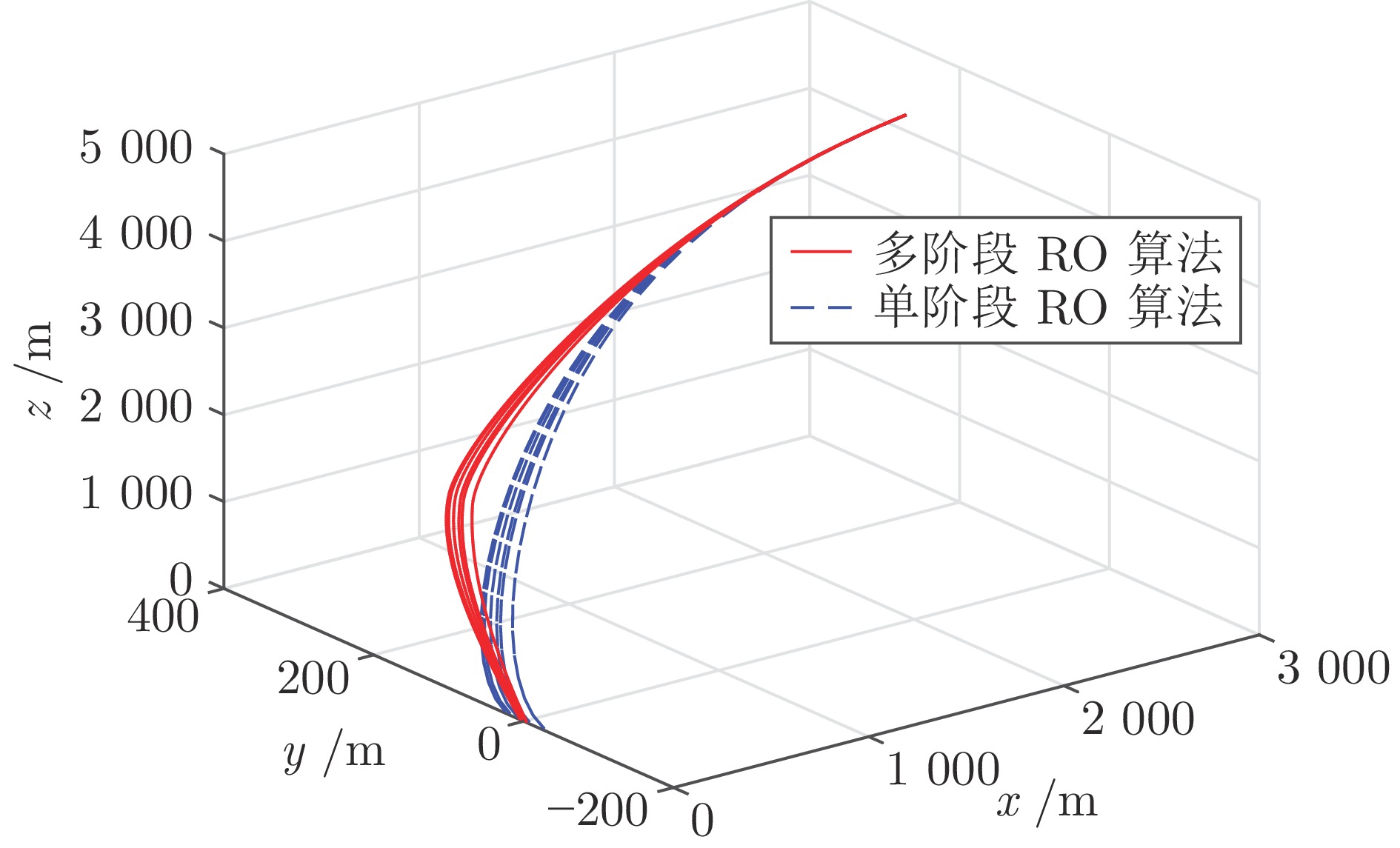
图 7 单阶段RO算法和多阶段RO算法在各个实际风场下的轨迹
Fig. 7 The trajectories of single-stage RO algorithm and multi-stage RO algorithm under each actual wind field
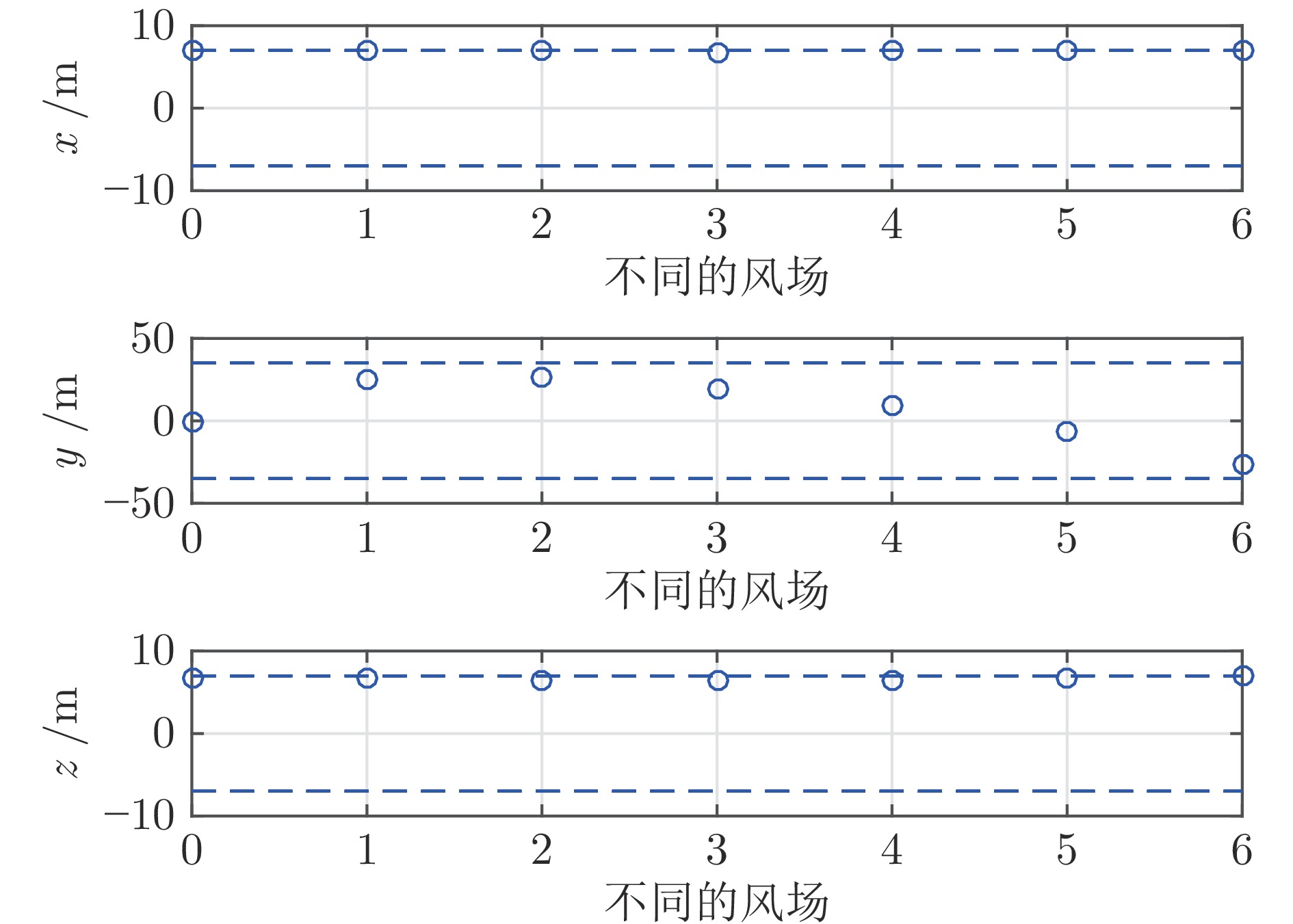
图 10 单阶段RO算法在不同风场下的最终位置与约束范围
Fig. 10 The terminal position and its constraint range of single-stage RO algorithm under different wind fields
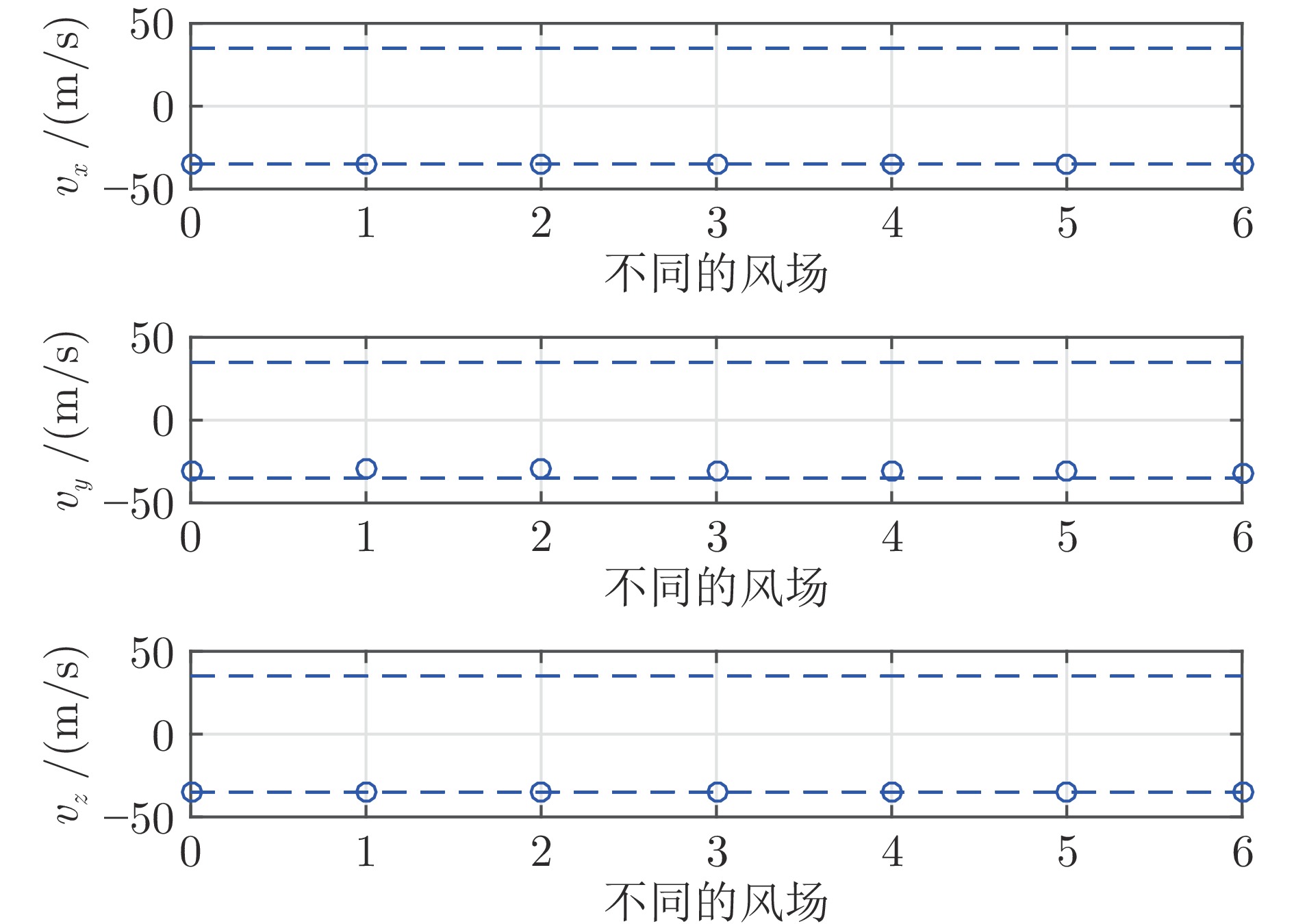
图 11 单阶段RO算法在不同风场下的最终速度与约束范围
Fig. 11 The terminal velocity and its constraint range of single-stage RO algorithm under different wind fields
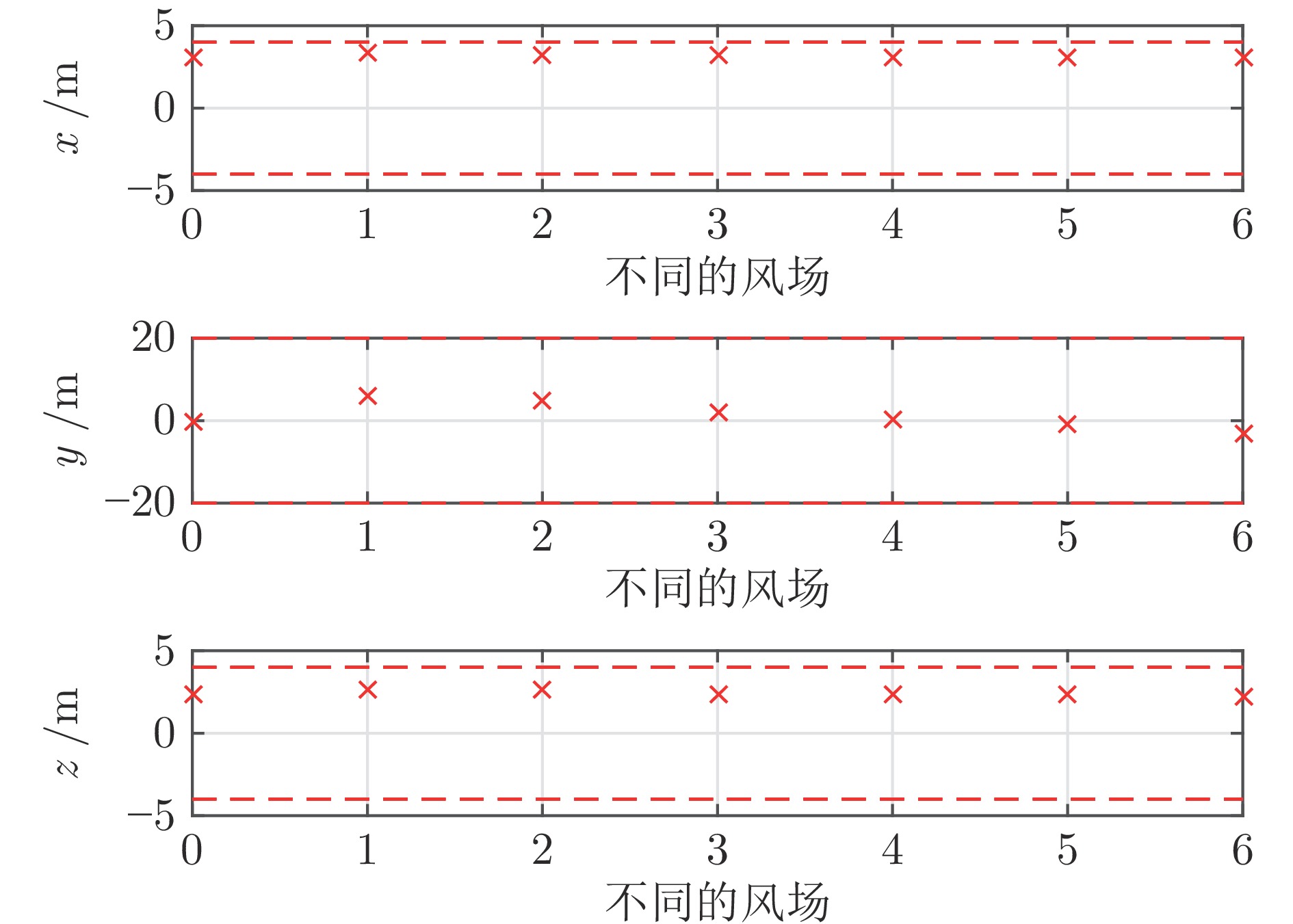
图 12 多阶段RO算法在不同风场下的最终位置与约束范围
Fig. 12 The terminal position and its constraint range of multi-stage RO algorithm under different wind fields
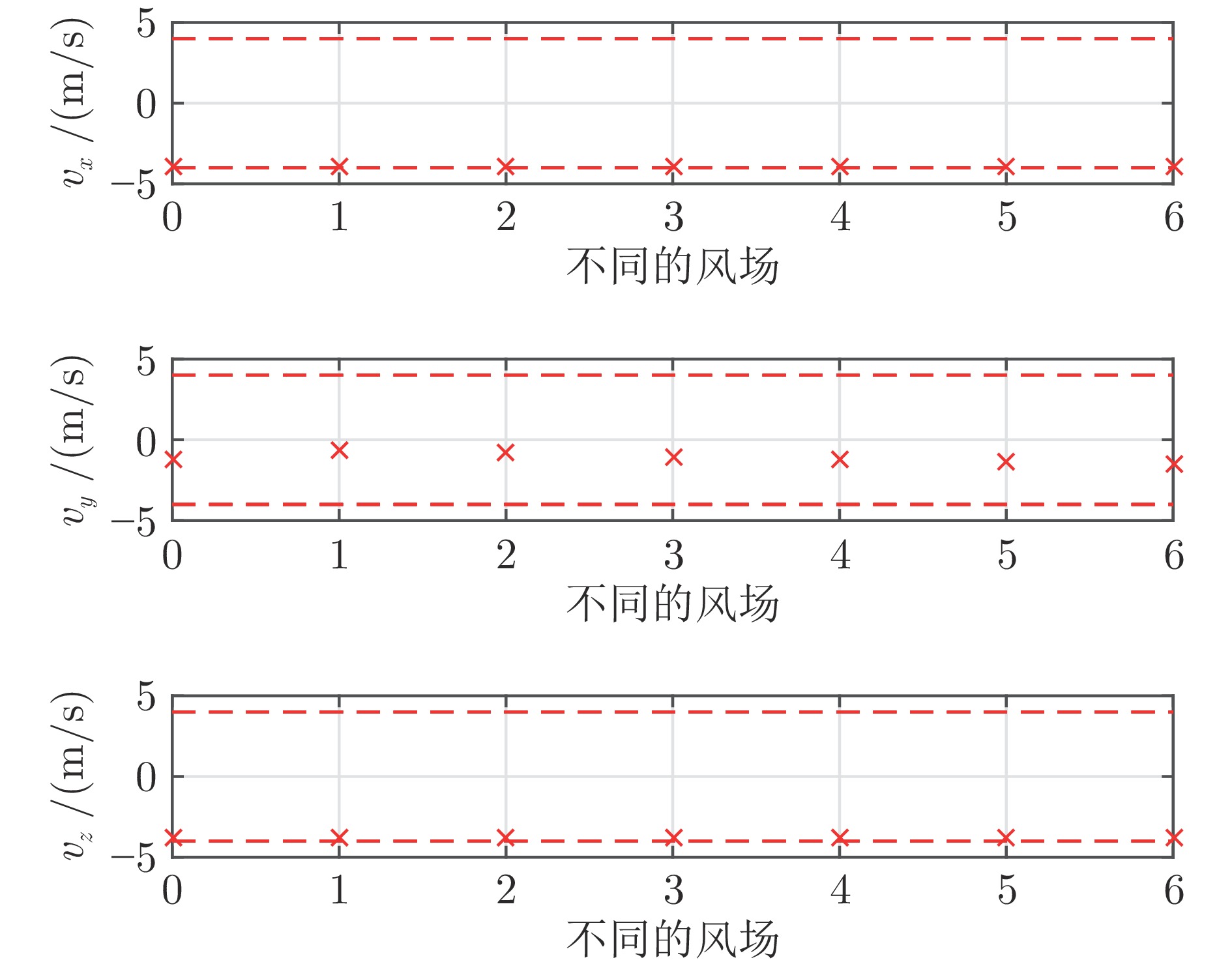
图 13 多阶段RO算法在不同风场下的最终速度与约束范围
Fig. 13 The terminal velocity and its constraint range of multi-stage RO algorithm under different wind fields

图 14 单阶段RO算法与NO算法在不同风场下的最终位置误差
Fig. 14 The terminal position errors of single-stage RO algorithm and NO algorithm under different wind fields
表 1 仿真参数值
Table 1 Simulation parameter values
参数 取值 初始状态 ${\boldsymbol{r}}_0=\left[2~968~{\rm{m}},263~{\rm{m}},4~326~{\rm{m}}\right]^{\rm{T}} $, ${\boldsymbol{v}}_0 = \left[-295~{\rm{m/s}},27~{\rm{m/s}},-296~{\rm{m/s}}\right]^{\rm{T}}$, $m_0=48~185$ kg 期望落点状态 ${\boldsymbol{r}}_f =\left[0~{\rm{m}},0~{\rm{m}},0~{\rm{m}}\right]^{\rm{T}}$, $ {\boldsymbol{v}}_f =\left[0~{\rm{m/s}},0~{\rm{m/s}},0~{\rm{m/s}}\right]^{\rm{T}}$ 火箭燃料消耗常数 $\kappa=2~975$ 火箭参考面积 $S_{{{\rm{ref}}}}=8.814\ {\rm{m}}^2 $ 空气动力学阻力系数 $C_D=4.5$ 标称风场参数 $\hat{{\boldsymbol{s}}}=\left[-0.073,4.460,5.230\right]^{\rm{T}},\ \mu=2~234,\ \sigma=1~635$, $ k=2.16\times{10}^{-3}, b=0.35$ ${\boldsymbol{S}}_\tau $中的参数 $\tau=1,\ {\boldsymbol{D}}=\text{ diag}\left\{0.83,\ 1.20,\ 2.66\right\}$ 终端约束范围 单阶段RO算法${\boldsymbol{L}}=\left[L_{rx},L_{ry},L_{rz},L_{vx},L_{vy},L_{vz}\right]=\left[7,35,7,35,35,35\right]$
多阶段RO算法${\boldsymbol{L}}=\left[4,20,4,4,4,4 \right]$多阶段RO算法的阶段数 2  下载: 导出CSV
下载: 导出CSV
表 2 单阶段RO算法和多阶段RO算法的运行时间
Table 2 Running time of single-stage RO algorithm and multi-stage RO algorithm
算法 运行时间(s) 单阶段RO算法 6.61 多阶段RO算法 13.14
下载: 导出CSV
-
[1] McCurdy D, Roche J. Structural sizing of a horizontal take-off launch vehicle with an air collection and enrichment system. In: Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. Fort Lauderdale, USA: AIAA, 2004. Article No. 3394 [2] Reynolds T, Malyuta D, Mesbahi M, Acikmese B, Carson J M. Funnel synthesis for the 6-DOF powered descent guidance problem. In: Proceedings of the AIAA Scitech 2021 Forum. Virtual Event: AIAA, 2021. Article No. 0504 [3] Scharf D P, Acikmese B, Dueri D, Benito J, Casoliva J. Implementation and experimental demonstration of onboard powered-descent guidance. Journal of Guidance, Control, and Dynamics, 2017, 40(2): 213-229 doi: 10.2514/1.G000399 [4] Klumpp A R. Apollo lunar descent guidance. Automatica, 1974, 10(2): 133-146 doi: 10.1016/0005-1098(74)90019-3 [5] McInnes C R. Direct adaptive control for gravity-turn descent. Journal of Guidance, Control, and Dynamics, 1999, 22(2): 373-375 doi: 10.2514/2.4392 [6] Zhou L Y, Xia Y Q. Improved ZEM/ZEV feedback guidance for Mars powered descent phase. Advances in Space Research, 2014, 54(11): 2446-2455 doi: 10.1016/j.asr.2014.08.011 [7] Liu Y H, Wang H L, Fan J X, Wu J F, Wu T C. Control-oriented UAV highly feasible trajectory planning: A deep learning method. Aerospace Science and Technology, 2021, 110: Article No.106435 doi: 10.1016/j.ast.2020.106435 [8] You S X, Wan C H, Dai R, Rea J R. Learning-based onboard guidance for fuel-optimal powered descent. Journal of Guidance, Control, and Dynamics, 2021, 44(3): 601-613 doi: 10.2514/1.G004928 [9] 周宏宇, 王小刚, 单永志, 赵亚丽, 崔乃刚. 基于改进粒子群算法的飞行器协同轨迹规划. 自动化学报, 2022, 48(11): 2670-2676Zhou Hong-Yu, Wang Xiao-Gang, Shan Yong-Zhi, Zhao Ya-li, Cui Nai-Gang. Synergistic path planning for multiple vehicles based on an improved particle swarm optimization method. Acta Automatica Sinica, 2022, 48(11): 2670-2676 [10] Wei H L, Shi Y. MPC-based motion planning and control enables smarter and safer autonomous marine vehicles: Perspectives and a tutorial survey. IEEE/CAA Journal of Automatica Sinica, 2023, 10(1): 8-24 doi: 10.1109/JAS.2022.106016 [11] Lawden D F. Optimal Trajectories for Space Navigation. London: Butter Worths, 1963. 42−51 [12] Lu P. Propellant-optimal powered descent guidance. Journal of Guidance, Control, and Dynamics, 2018, 41(4): 813-826 doi: 10.2514/1.G003243 [13] Acikmese B, Ploen S R. Convex programming approach to powered descent guidance for Mars landing. Journal of Guidance, Control, and Dynamics, 2007, 30(5): 1353-1366 doi: 10.2514/1.27553 [14] Acikmese B, Blackmore L. Lossless convexification of a class of optimal control problems with non-convex control constraints. Automatica, 2011, 47(2): 341-347 doi: 10.1016/j.automatica.2010.10.037 [15] Harris M W, Acikmese B. Lossless convexification of non-convex optimal control problems for state constrained linear systems. Automatica, 2014, 50(9): 2304-2311 doi: 10.1016/j.automatica.2014.06.008 [16] Liu X F, Lu P. Solving nonconvex optimal control problems by convex optimization. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 750-765 doi: 10.2514/1.62110 [17] Liu X, Li S, Xin M. Mars entry trajectory planning with range discretization and successive convexification. Journal of Guidance, Control, and Dynamics, 2022, 45(4): 755-763 doi: 10.2514/1.G006237 [18] Szmuk M, Reynolds T P, Acikmese B. Successive convexification for real-time six-degree-of-freedom powered descent guidance with state-triggered constraints. Journal of Guidance, Control, and Dynamics, 2020, 43(8): 1399-1413 doi: 10.2514/1.G004549 [19] 王祝, 徐广通, 龙腾. 基于定制内点法的多无人机协同轨迹规划. 自动化学报, 2023, 49(11): 2374-2385Wang Zhu, Xu Guang-Tong, Long Teng. Customized interior-point method for cooperative trajectory planning of unmanned aerial vehicles. Acta Automatica Sinica, 2023, 49(11): 2374-2385 [20] Boscariol P, Richiedei D. Robust point-to-point trajectory planning for nonlinear underactuated systems: Theory and experimental assessment. Robotics and Computer-Integrated Manufacturing, 2018, 50: 256-265 doi: 10.1016/j.rcim.2017.10.001 [21] Chen X L, Zhang R, Xue W C, Li H F. Robust neighboring optimal guidance for endoatmospheric powered descent under uncertain wind fields. In: Proceedings of the 34th Chinese Control and Decision Conference (CCDC). Hefei, China: IEEE, 2022. 1491−1496 [22] Brault P, Delamare Q, Giordano P R. Robust trajectory planning with parametric uncertainties. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021. 11095−11101 [23] Zhang Y. General robust-optimization formulation for nonlinear programming. Journal of Optimization Theory and Applications, 2007, 132: 111-124 doi: 10.1007/s10957-006-9082-z [24] Prabhakar A, Fisher J, Bhattacharya R. Polynomial chaos-Based analysis of probabilistic uncertainty in hypersonic flight dynamics. Journal of Guidance Control and Dynamics, 2010, 33(1): 222-234 doi: 10.2514/1.41551 [25] Wang F G, Yang S X, Xiong F F, Lin Q Z, Song J M. Robust trajectory optimization using polynomial chaos and convex optimization. Aerospace Science and Technology, 2019, 92: 314-325 doi: 10.1016/j.ast.2019.06.011 [26] Jiang X Q, Li S, Furfaro R, Wang Z B, Ji Y D. High-dimensional uncertainty quantification for Mars atmospheric entry using adaptive generalized polynomial chaos. Aerospace Science and Technology, 2020, 107: Article No.106240 doi: 10.1016/j.ast.2020.106240 [27] Zhang W, Wang Q, Zeng F Z, Yan C. An adaptive sequential enhanced PCE approach and its application in aerodynamic uncertainty quantification. Aerospace Science and Technology, 2021, 117: Article No.106911 doi: 10.1016/j.ast.2021.106911 -

 下载:
下载:

计量
- 文章访问数: 768
- HTML全文浏览量: 346
- PDF下载量: 172
- 被引次数: 0
