

ANFIS-based Measurement Information Anomaly Detection Method for Multi-AUV Cooperative Localization System
-
摘要: 针对异常水声测距信息对多自主水下航行器(Autonomous underwater vehicles, AUV)协同定位系统的不利影响, 以及传统故障检测方法在多水声测距信息交替混淆的情况下检测效率低的问题, 提出一种基于自适应神经模糊推理系统(Adaptive neuro-fuzzy inference system, ANFIS)的量测异常检测方法. 首先, 分别建立与各水声测距系统相对应的ANFIS模型; 然后, 基于自适应容积卡尔曼滤波(Adaptive cubature Kalman filter, ACKF)和马氏距离构造反映量测异常的特征信息作为ANFIS的输入; 其次, 基于预定义的量测异常信息建立了初始混合数据库以训练ANFIS模型实现对量测异常的在线实时检测与隔离; 最后, 利用湖水实验数据进行了AUV协同定位仿真验证. 实验结果表明该方法可以准确识别异常水声测距信息, 与传统故障检测方法相比, 误报率(False positive rate, FPR)与漏检率(False negative rate, FNR)均减少70%以上.
-
关键词:
- 自主水下航行器 /
- 协同定位 /
- 自适应神经模糊推理系统 /
- 水声测距 /
- 量测异常
Abstract: In this paper, a measurement anomaly detection method based on adaptive neuro-fuzzy inference system (ANFIS) is proposed to address the problem that abnormal underwater acoustic ranging information has adverse effects on the multi autonomous underwater vehicles (AUV) cooperative localization system and the traditional fault detection methods have low detection efficiency when the multi acoustic ranging information is alternately confused. Firstly, the ANFIS model corresponding to each underwater acoustic ranging system is established. Secondly, the characteristic information reflecting the measurement anomaly, which is based on adaptive cubature Kalman filter (ACKF) and Mahalanobis distance, is used as the input of ANFIS. Then we established an initial hybrid database of pre-defined abnormal measurement information to train ANFIS model to realize online real-time detection and isolation of measurement anomalies. Finally, the lake test data are used to verify the AUV cooperative localization simulation. The experimental results show that this method can accurately identify the abnormal situation of measurement information, as the false positive rate (FPR) and the false negative rate (FNR) are reduced by more than 70% compared with the traditional fault detection method. -

图 2 基于ANFIS的量测异常检测原理图
Fig. 2 Schematic diagram of measurement anomaly detection based on ANFIS
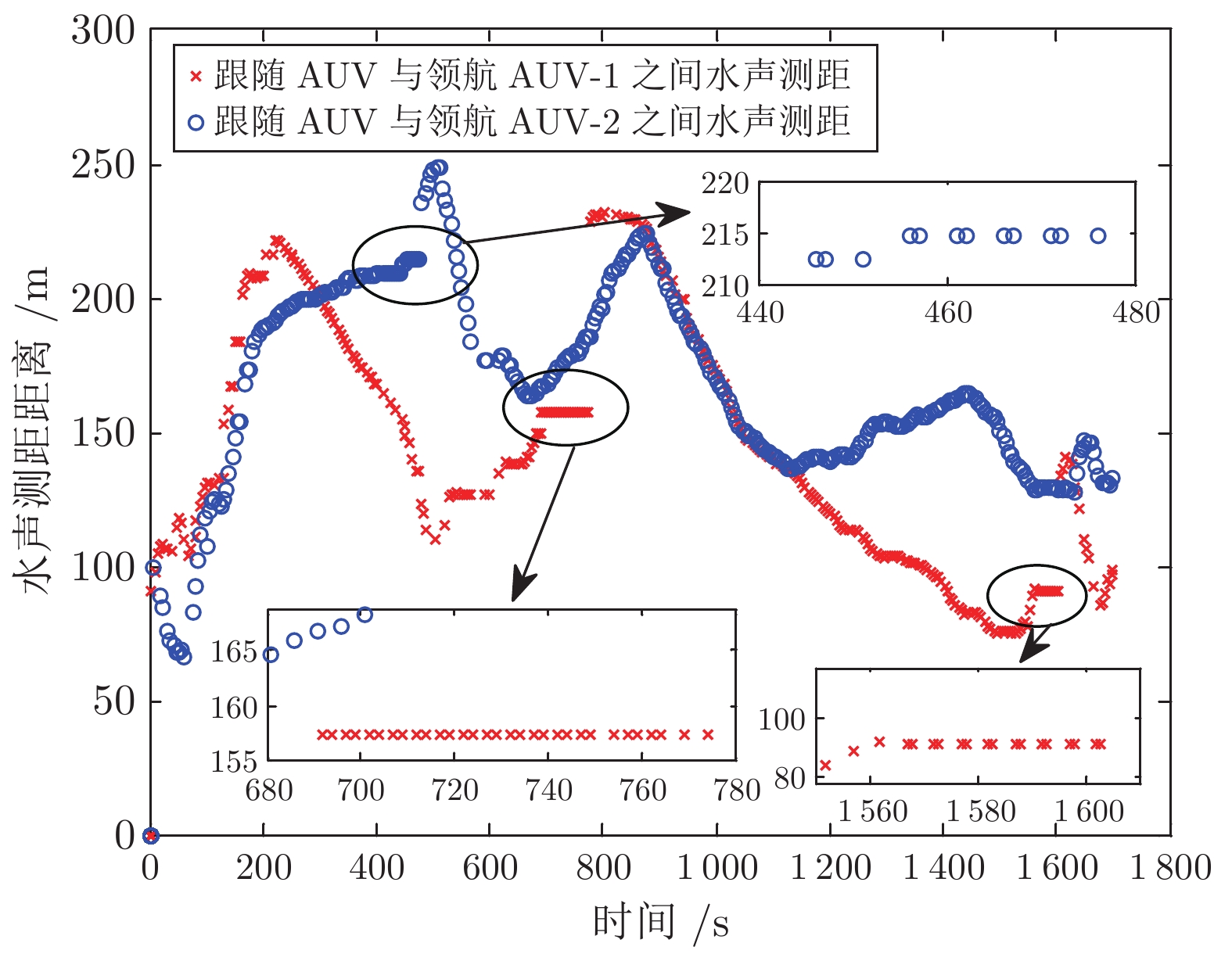
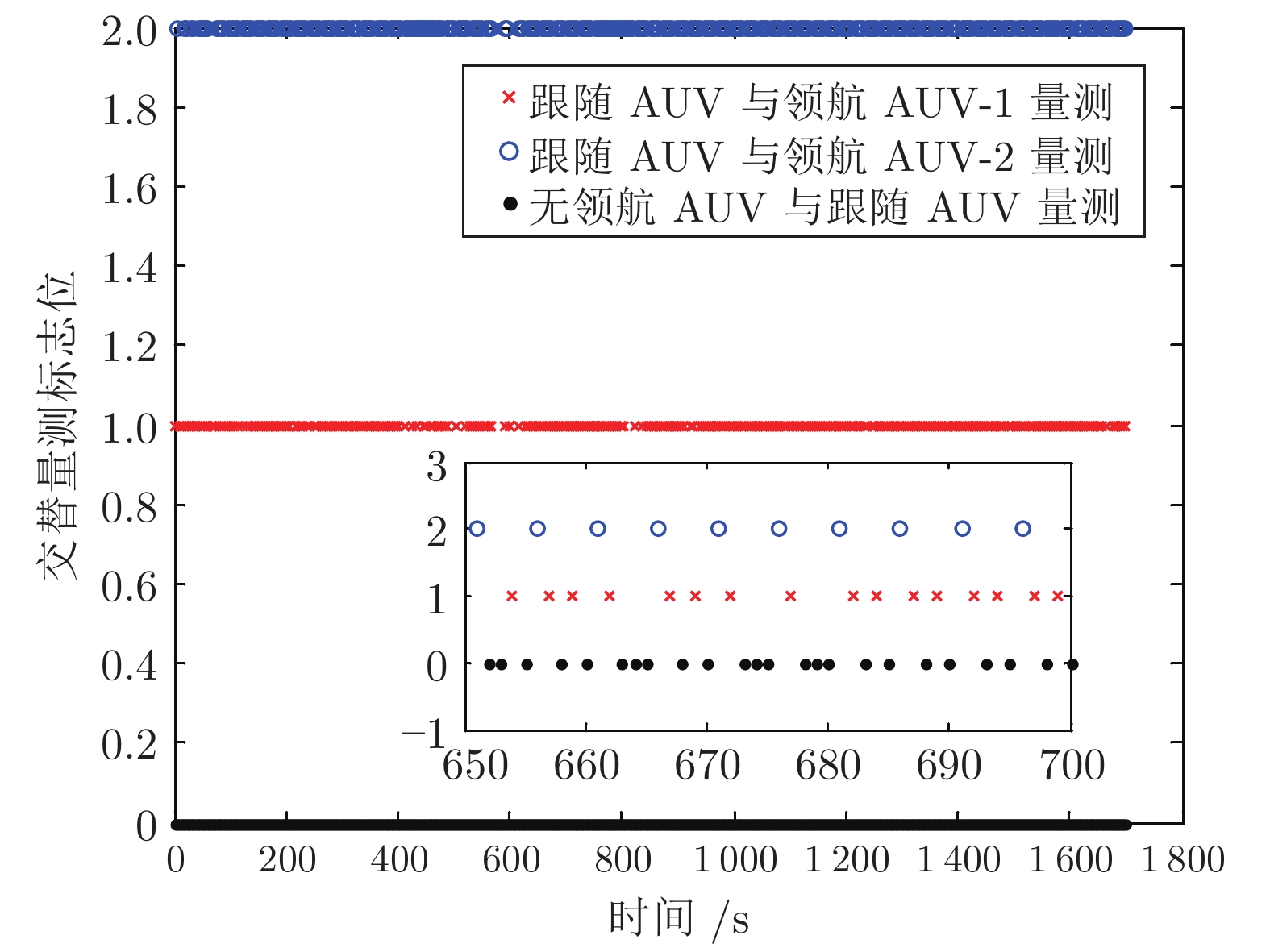
图 7 跟随AUV与各领航AUV之间水声测距信息
Fig. 7 The underwater acoustic ranging information between the follower AUV and each leader AUV
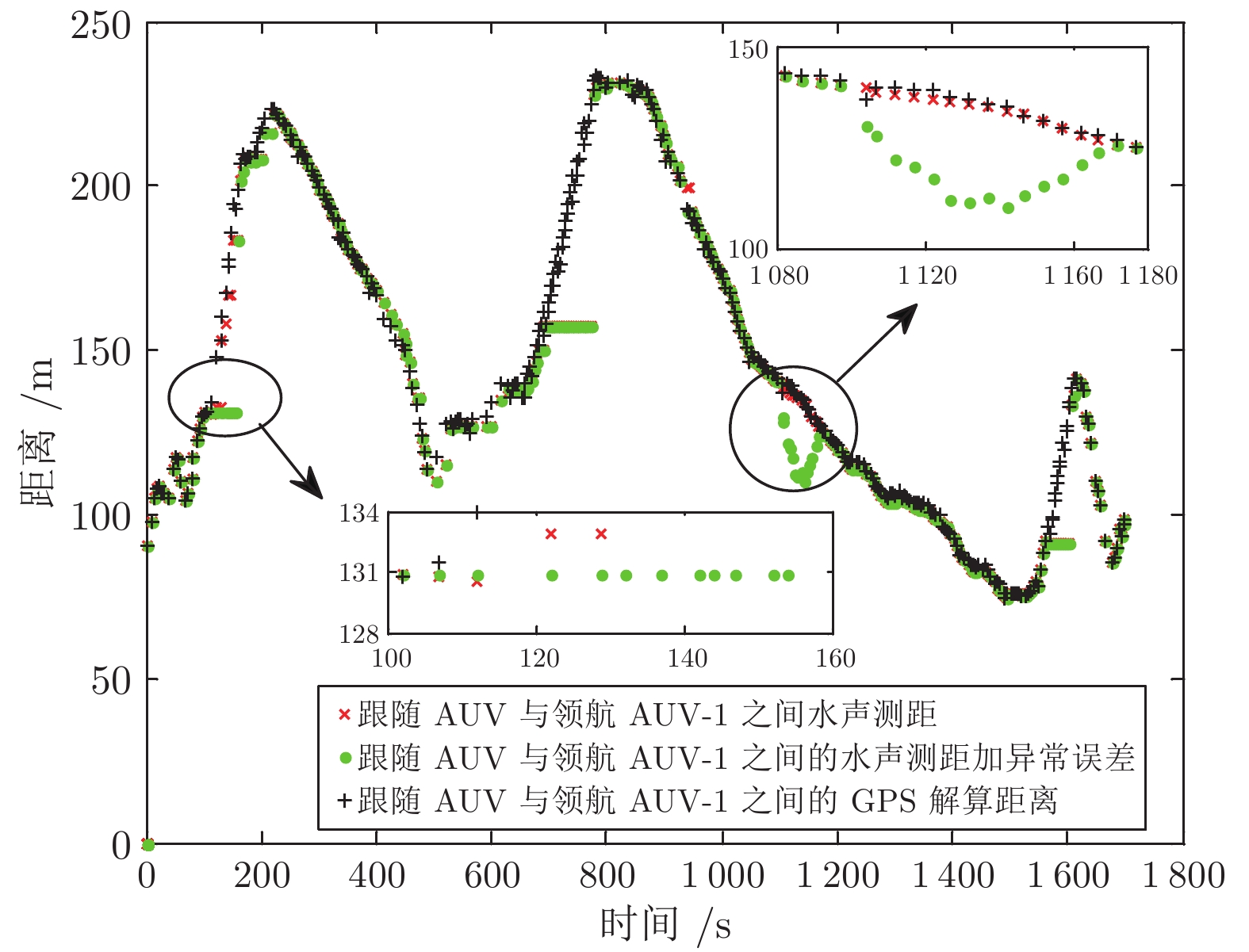
图 8 跟随AUV与领航AUV-1之间距离对比
Fig. 8 Comparison of distance between follower AUV and leader AUV-1

图 9 跟随AUV与领航AUV-2之间距离对比
Fig. 9 Comparison of distance between follower AUV and leader AUV-2
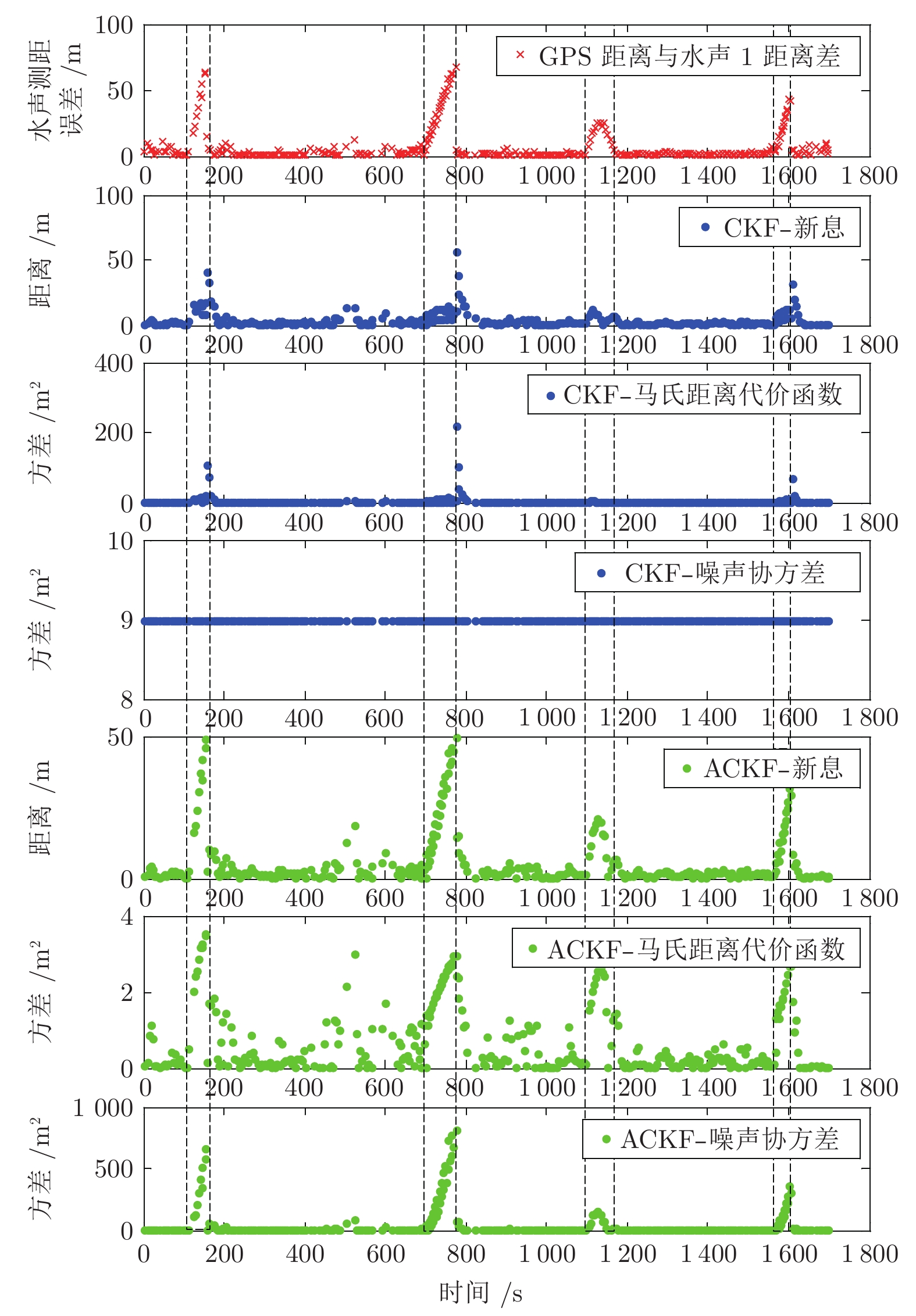
图 10 基于CKF和ACKF提取的特征信息对比
Fig. 10 Comparison of feature information extracted from CKF and ACKF

图 11 训练前后的隶属度函数对比
Fig. 11 Comparison of membership functions before and after training
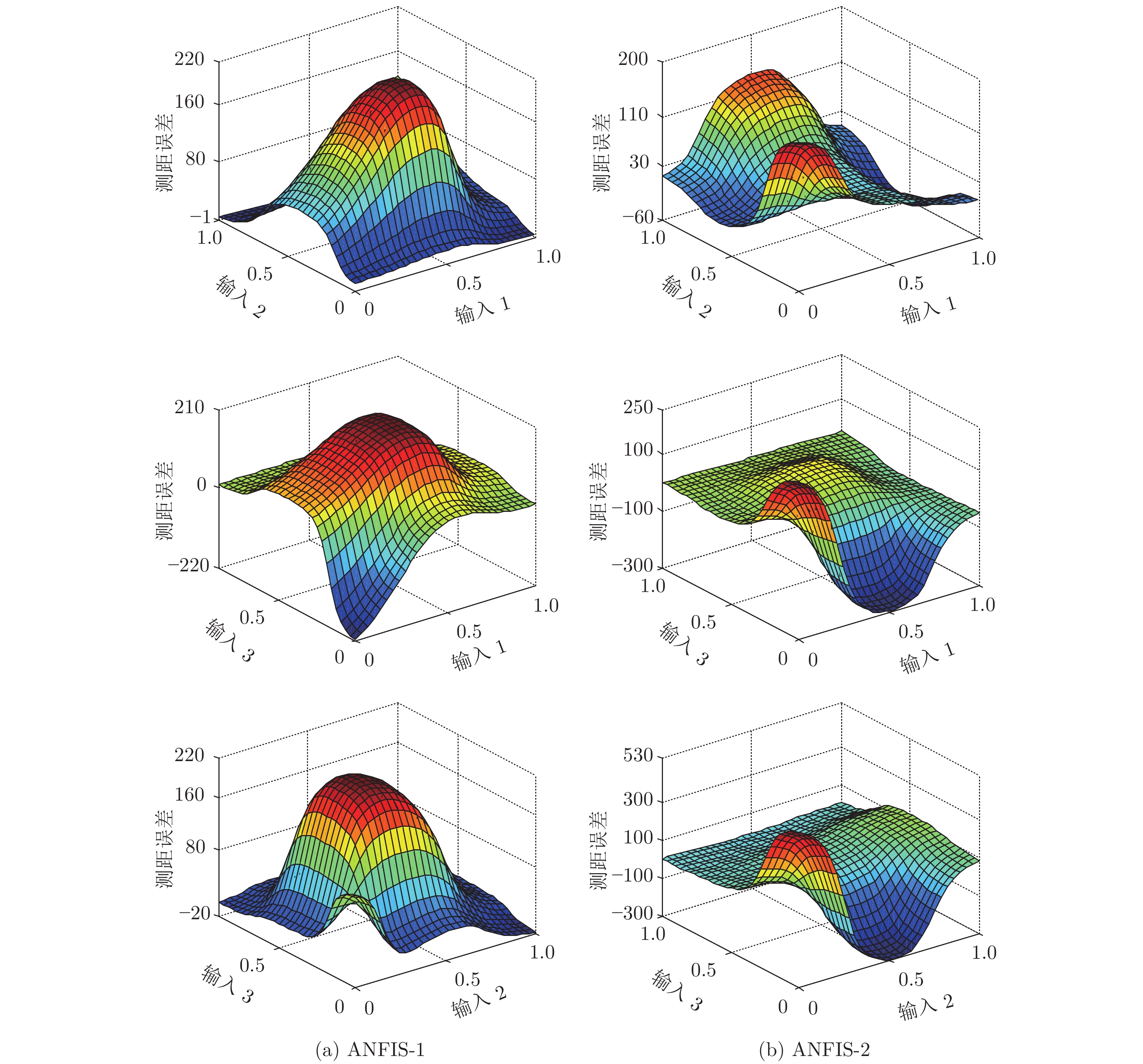
图 12 测距误差与特征信息之间关系的三维曲线图
Fig. 12 Three-dimensional plot of the relationship between ranging error and feature information

图 13 ANFIS-1模型输出值和量测异常状态判别
Fig. 13 The output value of ANFIS-1 model and the judgment of abnormal state of measurement

图 14 ANFIS-2模型输出值和量测异常状态判别
Fig. 14 The output value of ANFIS-2 model and the judgment of abnormal state of measurement

图 15 分别基于卡方和双阈值的量测异常检测结果
Fig. 15 Measurement anomaly detection results based on chi-square and dual thresholds respectively
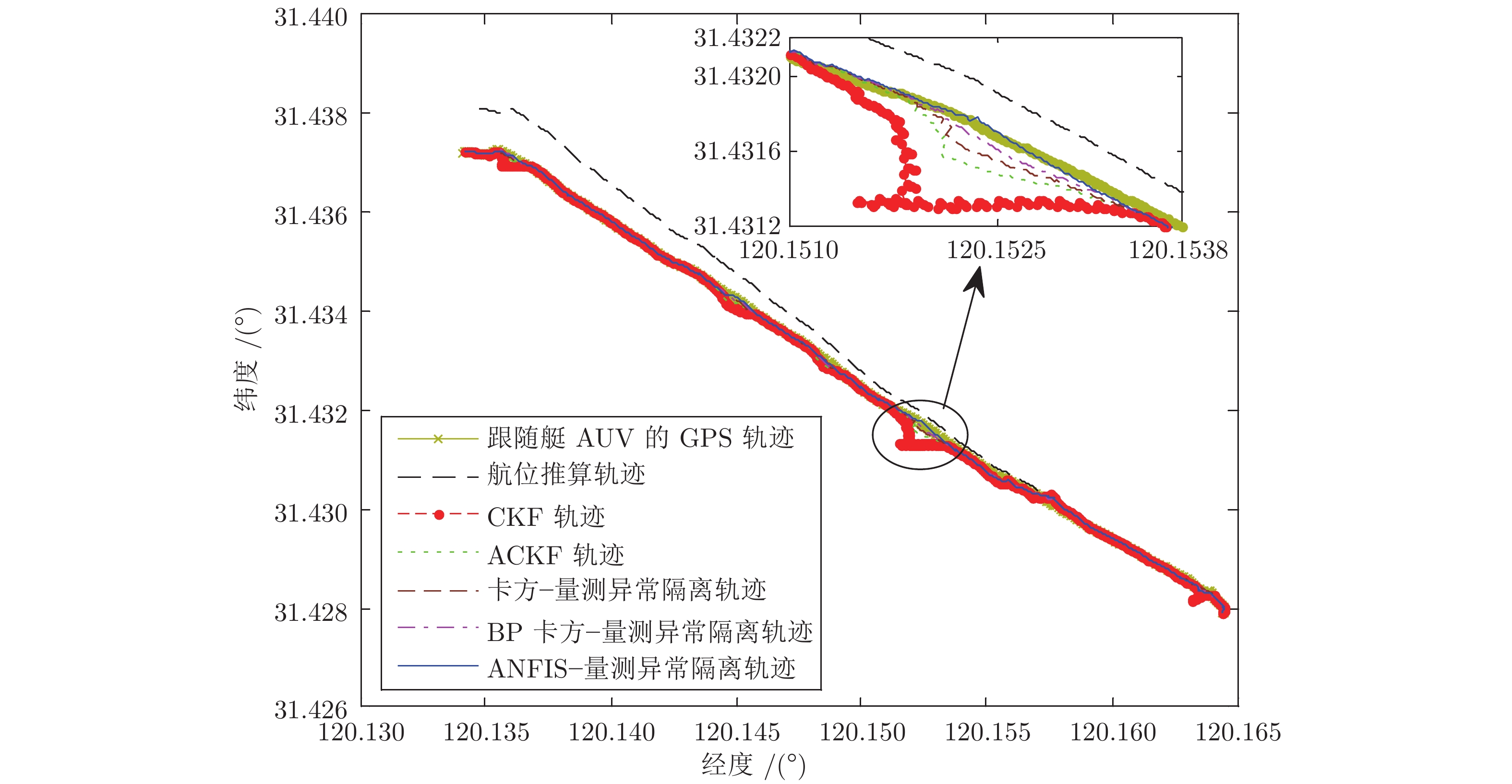
图 17 隔离量测异常的AUV的估计轨迹
Fig. 17 Estimated trajectories of follower AUV that isolate measurement anomalies

图 18 隔离量测异常的AUV的定位误差
Fig. 18 Positioning errors of follower AUV that isolate measurement anomalies
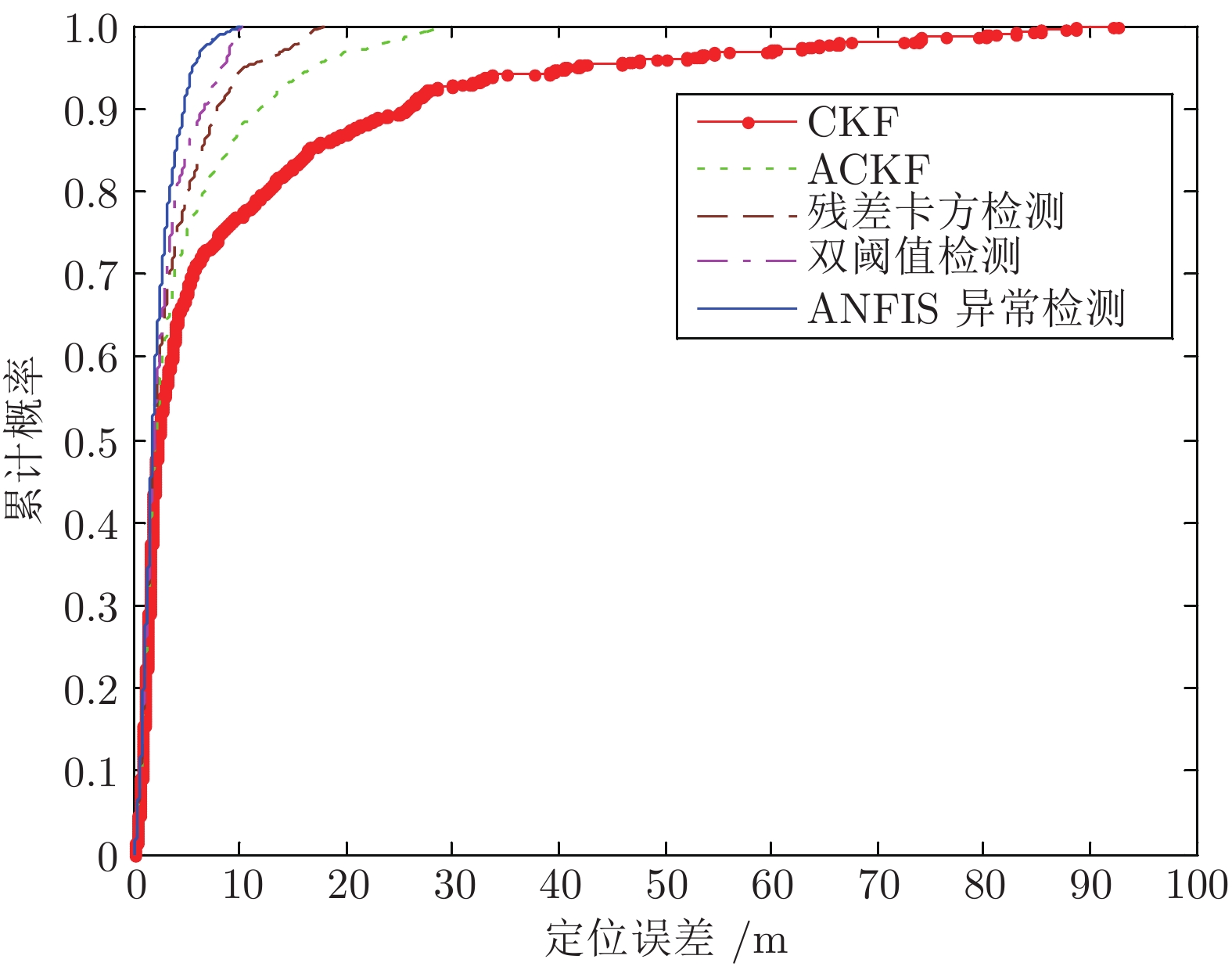
图 19 通过不同方法得到的定位误差的CDF
Fig. 19 The CDF of localization errors obtained by different methods
表 1 传感器参数
Table 1 Parameters of sensors
传感器 型号 性能 指标 水声调制解调器 ATM-885 通信范围 8000 m 传输速率 6.9 kbit/s GPS OEMV-2RT-2 单点精度 1.8 m (RMS) 惯性导航系统 H/H HZ001 航向精度 0.1% ~ 0.3% DVL DS-99 速度精度 0.2 kn  下载: 导出CSV
下载: 导出CSV
表 2 各量测异常检测方法的TP、TN、FP、FN统计
Table 2 The quantity statistics of TP, TN, FP and FN obtained by each measurement anomaly detection method
量测异常检测方法 TP数量 TN数量 FP数量 FN数量 残差卡方检测 23 388 17 34 双阈值检测 34 387 18 23 ANFIS检测 47 401 4 10
下载: 导出CSV
-
[1] 徐博, 白金磊, 郝燕玲, 高伟, 刘亚龙. 多AUV协同导航问题的研究现状与进展. 自动化学报, 2015, 41(03): 445-461.Xu Bo, Bai Jin-Lei, Hao Yan-Ling, Gao Wei, Liu Ya-Long. The research status and progress of cooperative navigation for multiple AUVs. Acta Automatica Sinica, 2015, 41(03): 445-461. [2] Huang Y L, Zhang Y G, Wu Z M, Li N, Chambers J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Transactions on Automatic Control, 2018, 63(02): 594–601. doi: 10.1109/TAC.2017.2730480 [3] Kim J. Cooperative localization and unknown currents estimation using multiple autonomous underwater vehicles. IEEE Robotics and Automation Letters, 2020, 5(02): 2365-2371. doi: 10.1109/LRA.2020.2972889 [4] Huang Y L, Zhang Y G, Xu B, Wu Z M. Chsmbers J A. A new adaptive extended Kalman filter for cooperative localization. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(01): 353-368. doi: 10.1109/TAES.2017.2756763 [5] Li Y C, Wang Y Y, YU W B. Multiple autonomous underwater vehicle cooperative localization in anchor-free environments. IEEE Journal of Oceanic Engineering, 2019, 44(04): 895-911. doi: 10.1109/JOE.2019.2935516 [6] Liu W X, Wang Y J, Yin B J. Thruster tault identification based on fractal feature and multiresolution wavelet decomposition for autonomous underwater vehicle. Proceedings of the Institution of Mechanical Engineers Part E —— Journal of Process Mechanical Engineering, 2017, 231(13): 2528−2539 [7] 张华强, 李东兴, 张国强. 混合χ2检测法在组合导航系统故障检测中的应用. 中国惯性技术学报, 2016, 24(05): 696-700.Zhang Hua-Qiang, Li Dong-Xing, Zhang Guo-Qiang. Application of hybrid chi-square test method in fault detection of integrated navigation system. Journal of Chinese Inertial Technology, 2016, 24(05): 696-700. [8] Xu B, Razzaqi A A, Liu Y L. Cooperative localisation of AUVs based on huber-based robust algorithm and adaptive noise estimation. The Journal of Navigation, 2019, 72(04): 875-893. doi: 10.1017/S0373463319000018 [9] Guo R G, Gan Q, Zhang J, Guo K, Dong, J K, Dong J K. Huber cubature particle filter and online state estimation. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2017, 231(03): 158–167. [10] Yu C Y, Xiang X B Wilson P A, Zhang Q. Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics. IEEE Transactions on Cybernetics, 2020, 50(05): 1887-1899. doi: 10.1109/TCYB.2018.2890582 [11] Huang Y L, Zhang Y G, Li N, Chambers J A. Robust student’s t based nonlinear Filter and smoother. IEEE Transactions on Aerospace and Electronic Systems, 2017, 52(02): 2586–2596. [12] Liu X, Chen B D, XU B, WU Z Z, Honeine P. Maximum correntropy unscented filter. International Journal of Systems Science, 2017, 48(08): 1607–1615. doi: 10.1080/00207721.2016.1277407 [13] Li Q, Ben Y Y, Naqvi S M, Neasham J A, Chambers J A. Robust student's t-based cooperative navigation for autonomous underwater vehicles. IEEE Transactions on Instrumentation and Measurement, 2018, 67(08): 1762-1777. doi: 10.1109/TIM.2018.2809139 [14] Fan Y, Zhang Y G, Wang G Q, Li N. Maximum correntropy based unscented particle filter for cooperative navigation with heavy-tailed measurement noises. Sensors, 2018, 18(10): 3183. doi: 10.3390/s18103183 [15] Xiong K, Shi W, Wang S Y. Robust multikernel maximum correntropy filters. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(06): 1159-1163. doi: 10.1109/TCSII.2019.2931409 [16] Shi W L, Li Y S, Wang Y Y. Noise-free maximum correntropy criterion algorithm in non-Gaussian environment. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(10): 2224-2228. doi: 10.1109/TCSII.2019.2914511 [17] 史宏洋. AUV协同定位中的故障诊断与容错控制研究[博士学位论文], 哈尔滨工程大学, 中国, 2015.Shi Hong-Yang. The Research on Fault Detection and Fault Tolerant Control in AUV Cooperative Localization [Ph.D. dissertation], Harbin Engineering University, China, 2015. [18] Xiong H L, Li Y J, Du Z F, Mai Z Z. Fault-tolerant GNSS/SINS/DVL/CNS integrated navigation and positioning mechanism based on adaptive information sharing factors. IEEE Systems Journal, 2020, 14(3): 3744-3754. doi: 10.1109/JSYST.2020.2981366 [19] Xu H W, Lian B W. Fault detection for multi-source integrated navigation system using fully convolutional neural network. IET Radar Sonar and Navigation, 2018, 12(07): 774-782. doi: 10.1049/iet-rsn.2017.0424 [20] 张宇献, 郭佳强, 钱小毅, 王建辉. 有混合数据输入的自适应模糊神经推理系统. 自动化学报, 2019, 45(9): 1743−1755.Zhang Yu-Xian, Guo Jia-Qiang, Qian Xiao-Yi, Wang Jian-Hui. An adaptive network-based fuzzy inference system with mixed data inputs. Acta Automatica Sinica, 2019, 45(9): 1743−1755. [21] 赵修斌, 高超, 庞春雷, 张闯, 王勇. BP神经网络辅助的缓变故障双阈值检测法. 控制与决策, 2020, 35(06): 1384-1390.Zhao Xiu-Bin, Gao Chao, Pang Chun-Lei, Zhang Chuang, Wang Yong. A double-threshold test method for soft faults assisted by BP neural network. Control and Decision, 2020, 35(06): 1384-1390. [22] Sun R, Cheng Q, Wang G Y, Ochieng W Y. A novel online data-driven algorithm for detecting UAV navigation sensor faults. Sensors, 2017, 17(10): 2243. doi: 10.3390/s17102243 [23] Xu B, Li S X, Razzaqi A A, Zhang J. Cooperative localization in harsh underwater environment based on the MC-ANFIS. IEEE Access. 2019, 7: 55407-55421. doi: 10.1109/ACCESS.2019.2913039 [24] Wang W, Chen X Y. Application of improved 5th-cubature Kalman filter in initial strapdown Inertial navigation system alignment for large misalignment angles. Sensors, 2018, 18(02): 659. doi: 10.3390/s18020659 [25] Amin K M, Hassan A M, Alireza K, Navid V, Hassan K M, Frede B, et al. Improved stabilization of nonlinear DC microgrids: cubature Kalman filter approach. IEEE Transactions on Industry Applications, 2018, 54(05): 5104-5112. doi: 10.1109/TIA.2018.2848959 [26] Adarsh S, Ramachandran K I. Design of sensor data fusion algorithm for mobile robot navigation using ANFIS and its analysis across the membership functions. Automatic Control and Computer Sciences, 2018, 52(5): 382-391. doi: 10.3103/S0146411618050036 [27] 赵文迪, 陈德旺, 卓永强, 黄允浒. 深度神经模糊系统算法及其回归应用. 自动化学报, 2020, 46(11): 2350-2358.Zhao Wen-Di, Chen De-Wang, Zhuo Yong-Qiang, Huang Yu-Hu. Deep Neural Fuzzy System Algorithm and Its Regression Application. Acta Automatica Sinica, 2020, 46(11): 2350-2358. [28] Ramezanizadeh M, Ahmadi M H, Nazari M A, Sadeghzadeh M, Chen L G. A review on the utilized machine learning approaches for modeling the dynamic viscosity of nanofluids. Renewable and Sustainable Energy Reviews, 2019, 114, 109345. doi: 10.1016/j.rser.2019.109345 [29] 徐博, 李盛新, 王连钊, 段腾辉, 姚贺. 一种基于自适应神经模糊推理系统的多AUV协同定位方法. 中国惯性技术学报, 2019, 27(04): 440-447.Xu Bo, Li Sheng-Xing, Wang Lian-Zhao, Duan Teng-Hui, Yao He. A multi-AUV cooperative localization method based on adaptive neuro-fuzzy inference system. Journal of Chinese Inertial Technology, 2019, 27(04): 440-447. -

 下载:
下载:





计量
- 文章访问数: 1875
- HTML全文浏览量: 765
- PDF下载量: 197
- 被引次数: 0
