

A Multiple-Model Based Adaptive Actuator Failure Compensation Scheme for Nonlinear Systems With Dynamic Mutations
Author Bio:
WEN Li-Yan Associate professor at the College of Automation Engineering, Nanjing University of Aeronautics and Astronautics (NUAA). She received her Ph.D. degree from NUAA in 2016. Her research interest covers adaptive control, adaptive fault isolation, and fault tolerant control and their applications. Corresponding author of this paper
TAO Gang Professor at University of Virginia, USA. His research interest covers adaptive control and its applications
JIANG Bin Professor at the College of Automation Engineering, Nanjing University of Aeronautics and Astronautics. His research interest covers fault diagnosis and fault tolerant control and their applications
YANG Jie Master student at the College of Automation Engineering, Nanjing University of Aeronautics and Astronautics. His research interest covers adaptive control and its application

































-
摘要: 本文针对因多重不确定执行器故障而引起系统动态突变的非线性系统, 设计了一种基于多模型切换的自适应执行器故障补偿控制策略, 以提高系统应对动态突变的能力, 同时实现不确定执行器故障的快速精确补偿. 针对执行器故障模式的不确定性问题, 采用基于多模型的参数估计方法, 设计了自适应控制器组; 基于最优性能指标函数, 提出了一种控制切换机制, 以选择最佳的自适应控制器作为当前的控制器, 从而实现期望的故障补偿控制. 所设计的多模型自适应控制策略, 可以保证所有闭环系统信号有界, 且在出现有限数量的不确定性执行器故障情况下, 系统输出渐近跟踪所选择的参考系统输出; 同时, 当系统中出现持续间歇性执行器故障时, 此方法可以保证系统的输出跟踪误差是平均小的. 最后, 本文基于飞行器动力学模型, 进行仿真研究, 验证了所设计的自适应故障补偿策略的有效性.
-
关键词:
- 自适应控制 /
- 动态突变 /
- 多模型控制 /
- 执行器故障, 故障补偿 /
- 输出跟踪 /
Abstract: In this paper, a multiple-model switching based adaptive failure compensation scheme is developed for feedback linearizable nonlinear systems with uncertain actuator failures and dynamic mutations, for fast and accurate actuator failure compensation. To deal with uncertain failure pattern conditions, multiple adaptive controllers are designed based on multiple model parameter estimation. A control switching mechanism is employed based on finding the minimal performance cost index for selecting the best controller for failure compensation. The designed multiple model adaptive control scheme can ensure that all closed-loop system signals are bounded and the system output asymptotically tracks the reference output in presence of finite number of uncertain actuator failures. Moreover, it can ensure the tracking error is small in the mean for persistent failures. Simulation results for an aircraft dynamic model are shown to verify the effectiveness of our designed control method1) 1 针对单输入单输出的非线性系统:$ \dot{{\boldsymbol{x}}} = f({\boldsymbol{x}})+g({\boldsymbol{x}}){\boldsymbol{u}}+ p({\boldsymbol{x}}){\boldsymbol{d}}, $ $y = $ $ h({\boldsymbol{x}}) , $ 若对所有的$ {\boldsymbol{x}}\in {\bf{R}}^{{n}} ,$ $ L_gL_f^kh({\boldsymbol{x}}) = 0, $ $ \forall k = 0, 1, 2, \cdots, $ $ \rho-2 ,$ 且$ L_gL_f^{\rho-1}h({\boldsymbol{x}})\neq 0, $ 则此非线性系统的控制相对阶为$ \rho ;$ 若对所有的$ {\boldsymbol{x}} \in {\bf{R}}^{{n}} ,$ $ L_pL_f^kh({\boldsymbol{x}}) = 0, $ $ \forall k = 0, 1, 2, \cdots, \nu-2, $ 且$ L_pL_f^{\nu-1}h({\boldsymbol{x}})\neq $ $ 0 ,$ 则此非线性系统的扰动相对阶为$ \nu .$ 关于李导数的定义参见脚注2.2 若$ f({\boldsymbol{x}})\in {\bf{R}}^n, $ $ g({\boldsymbol{x}})\in {\bf{R}}^{n}, $ $ h({\boldsymbol{x}})\in {\bf{R}}, $ 定义李导数:$ L_fh({\boldsymbol{x}}) = $ $ \dfrac{\partial h({\boldsymbol{x}})}{\partial {\boldsymbol{x}}}f({\boldsymbol{x}}) = \dfrac{\partial h({\boldsymbol{x}})}{\partial x_1}f_1+\cdots+\dfrac{\partial h(x)}{\partial x_n}f_{{n}} $ , 且有$ L_f^0h({\boldsymbol{x}}) = h({\boldsymbol{x}}) $ ,$ L_f^{i+1}h({\boldsymbol{x}}) =L_f(L_f^ih({\boldsymbol{x}})) = \dfrac{\partial L_f^ih({\boldsymbol{x}})}{\partial {\boldsymbol{x}}}f({\boldsymbol{x}}) $ . 类似地,$ L_gL_fh ({\boldsymbol{x}}) = $ $ \dfrac{\partial L_fh({\boldsymbol{x}})}{\partial {\boldsymbol{x}}}g({\boldsymbol{x}}) $ ,$ L_gL_f^ih({\boldsymbol{x}}) = \dfrac{\partial L_f^ih({\boldsymbol{x}})}{\partial {\boldsymbol{x}}}g({\boldsymbol{x}}) $ .2)3) 3 在自适应控制系统中, 平均小(Small in the mean)是很常用的概念, 其是保证闭环系统稳定的充分条件.4) 4$ \|{\boldsymbol{q}}\|_t $ 为截断$ L^{\infty} $ 范数, 即:$ \sup_{\tau\leq t}\|{\boldsymbol{q}}(\tau)\| $ .5 若对所有的$ t\geq 0 $ , 有$ |\dot{{\boldsymbol{z}}}(t)|\leq k_1\|{\boldsymbol{z}}_t\|_{\infty}+k_2 $ , 其中$ k_1\geq 0 $ ,$ k_2\geq0 $ , 则信号$ {\boldsymbol{z}}(t) $ 是正则的.5) -
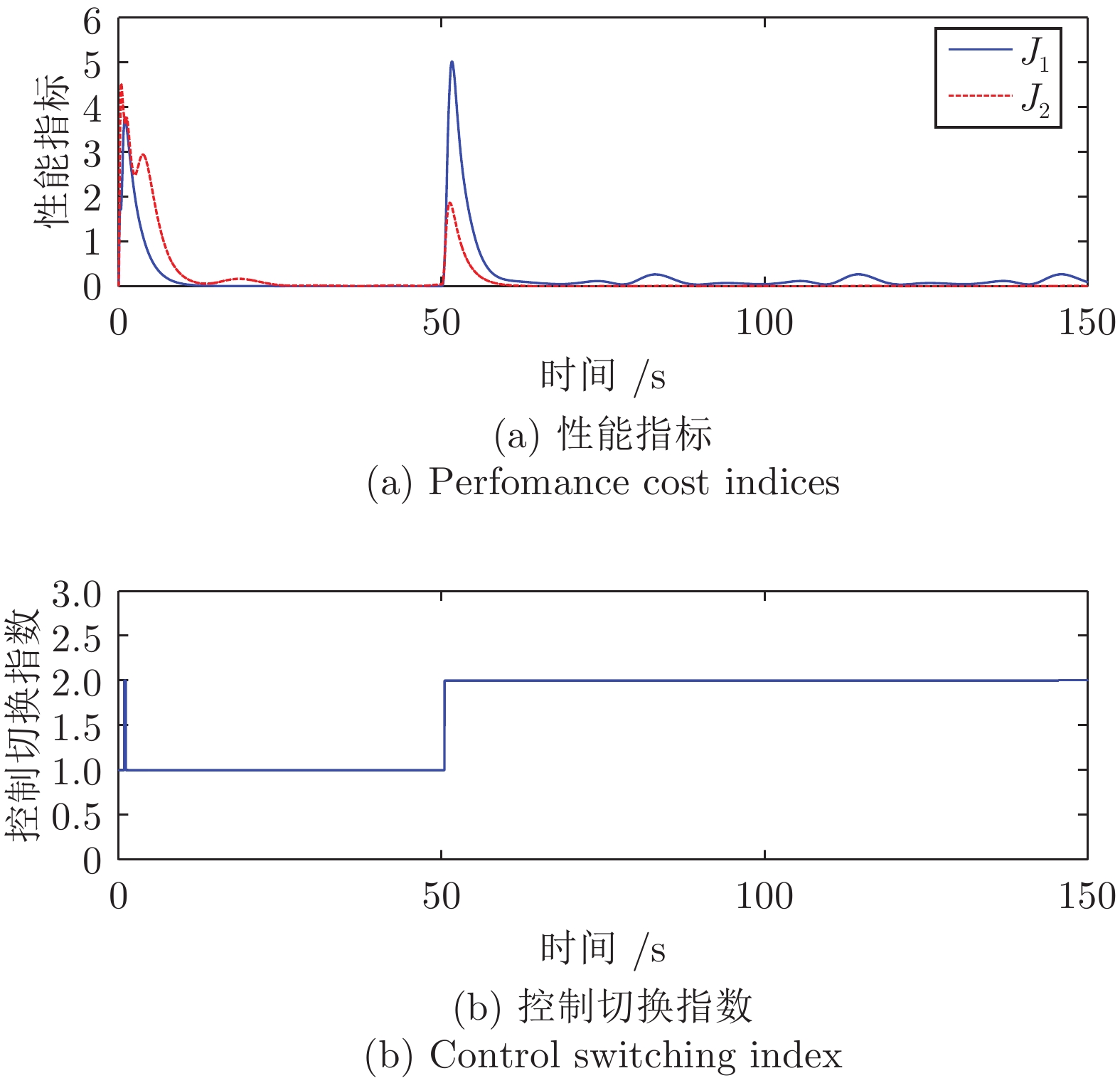
图 3 控制切换机制: 有限数目的执行器故障
Fig. 3 Control switching mechanism: a finite number of actuator failures

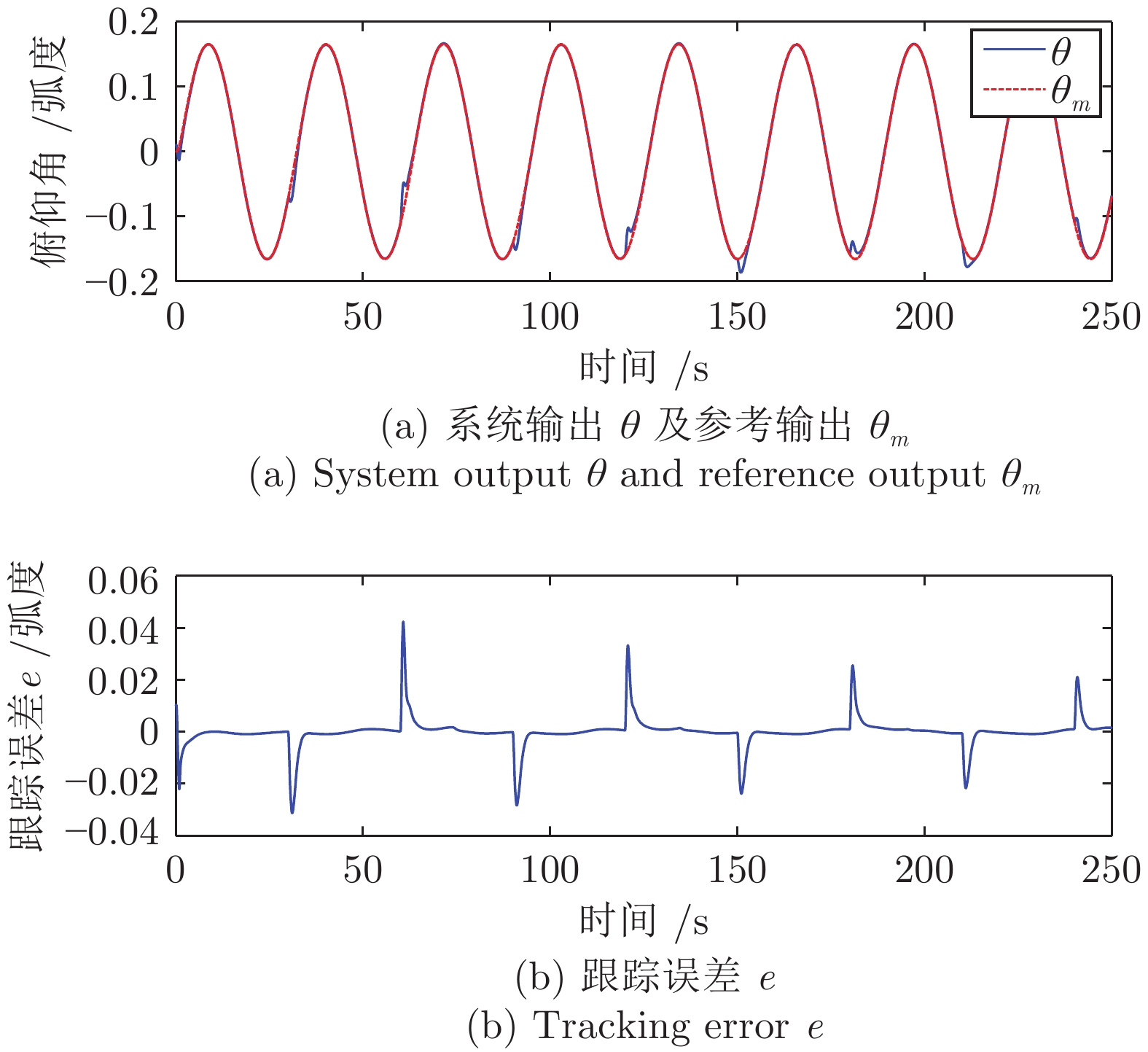
图 6 控制切换机制: 持续间歇性执行器故障
Fig. 6 Control switching mechanism: persistent actuator failures
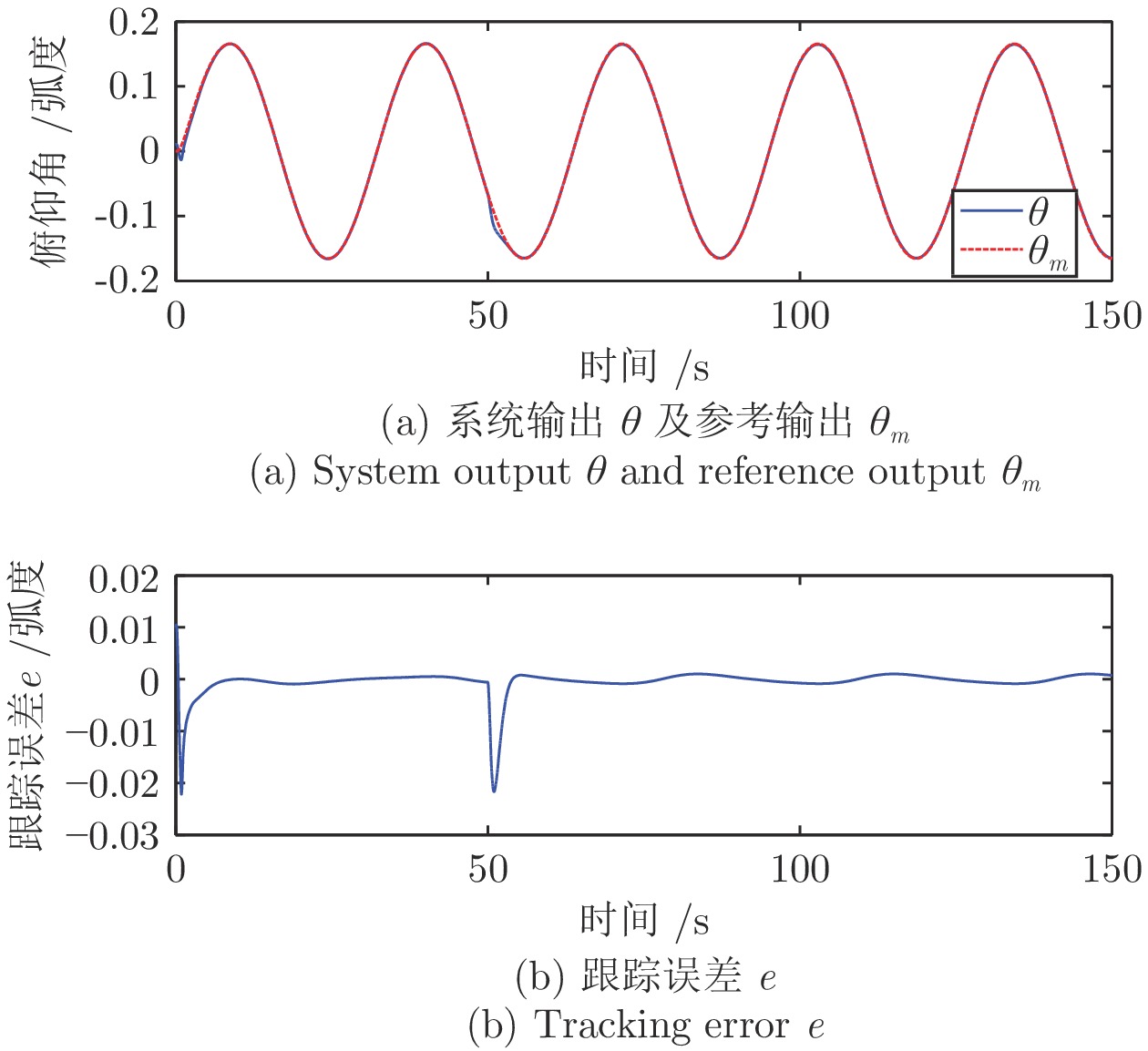
图 2 系统输出响应: 有限数目的执行器故障
Fig. 2 System output responses: a finite number of actuator failures
-
[1] 周东华, 叶银忠. 现代故障诊断与容错控制. 北京: 清华大学出版社, 2000.Zhou Dong-Hua, Ye Yin-Zhong. Modern fault diagnosis and fault-tolerant control. Beijing: Tsinghua University Press, 2000. [2] Tao G, Chen S H, Tang X D, Joshi S M. Adaptive Control of Systems with Actuator Failures, Springer, 2004. [3] Tao G. Direct adaptive actuator failure compensation control: a tutorial. Journal of Control and Decision, March 2014, 1(1): 75-101 doi: 10.1080/23307706.2014.885292 [4] 李俊领, 杨光红. 自适应容错控制的发展与展望. 控制与决策, 2014, 29(11): 1921-1926Li Jun-Ling, Yang Guang-Hong. Development and prospect of adaptive fault-tolerant control. Control and Decision, November 2014, 29(11): 1921-1926 (in Chinese) [5] 杨浩, 姜斌, 周东华. 互联系统容错控制的研究回顾与展望. 自动化学报, 2017, 43(1): 9-19Yang Hao, Jiang Bin, Zhou Dong-Hua. Review and perspectives on fault tolerant control for interconnected systems. Acta Automatica Sinica, 2017, 43(1): 9-19 (in Chinese) [6] 冯莉, 柴毅, 许水清, 张可, 杨志敏. 基于迭代学习的线性不确定重复系统间歇性故障估计. 自动化学报, 2020, 46(2): 307-319Feng Li, Chai Yi, Xu Shui-Qing, Zhang Ke, Yang Zhi-Min. Iterative learning based intermittent fault estimation for a class of linear uncertain repeated systems. Acta Automatica Sinica, 2020, 46(2): 307-319 (in Chinese) [7] Tong S C, Huo B Y, Li Y M. Observer-based adaptive decentralized fuzzy fault-tolerant control of nonlinear large-scale systems with actuator failures. IEEE Transactions on Fuzzy Systems, 2014, 22(1): 1-15 doi: 10.1109/TFUZZ.2013.2241770 [8] Zhong M Y, Song Y, Ding S X. Parity space-based fault detection for linear discrete time-varying systems with unknown input. Automatica, 2015, 59(9): 120-126 [9] Zhang Y M, Li X R. Detection and diagnosis of sensor and actuator failures using IMM estimator. IEEE Transactions on Aerospace and Electronic Systems, Oct. 1998, 34(4): 1293-1313 doi: 10.1109/7.722715 [10] Xu D, Jiang B, Shi P. Robust NSV fault-tolerant control system design against actuator faults and control surface damage under actuator dynamics. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5919-5928 doi: 10.1109/TIE.2015.2450714 [11] Chen G, Song Y D. Robust fault-tolerant cooperative control of multi-agent systems: A constructive design method. Journal of the Franklin Institute, 2015, 352(10): 4045-4066 doi: 10.1016/j.jfranklin.2015.05.031 [12] 肖冰, 胡庆雷, 张友民. 执行器卡死并失效的航天器姿态稳定控制. 南京航空航天大学学报, 2011, 43: 5-9Xiao Bing, Hu Qing-Lei, Zhang You-Ming. Sliding mode fault tolerant attitude control for flexible spacecraft under actuator fault. Journal of Nanjing University of Aeronautics & Astronautics, 2011, 43: 5-9 (in Chinese) [13] 李晓航, 朱芳来. 延迟不确定马尔科夫跳变系统的执行器和传感器故障同时估计方法. 自动化学报, 2017, 43(1): 72-82Li Xiao-Hang, Zhu Fang-Lai. Simultaneous estimation of actuator and sensor faults for uncertain time-delayed markovian jump systems. Acta Automatica Sinica, 2017, 43(1): 72-82 (in Chinese) [14] 鄢镕易, 何潇, 周东华. 一类存在参数摄动的线性随机系统的鲁棒间歇故障诊断方法. 自动化学报. 2016, 42(7): 1004-1013Yan Rong-Yi, He Xiao, Zhou Dong-Hua. Robust Diagnosis of Intermittent Faults for Linear Stochastic Systems Subject to Time-varying Perturbations. Acta Automatica Sinica, 2016, 42(7): 1004-1013 (in Chinese) [15] Wang W, Wen C Y. Adaptive compensation for infinite number of actuator failures or faults. Automatica, 2011, 47(10): 2197-2210 doi: 10.1016/j.automatica.2011.08.022 [16] Wang C L, Guo L. Adaptive compensation for infinite number of actuator failures with an application to flight control. International Journal of Adaptive Control and Signal Processing, 2016, 30(3): 443-455 doi: 10.1002/acs.2585 [17] Zhang Y W, Qin S J. Adaptive actuator/component fault compensation for nonlinear systems. AIChE Journal, 2008, 54(9): 2404-2412 doi: 10.1002/aic.11546 [18] Jin X Z, Yang G H. Robust adaptive fault-tolerant compensation control with actuator failures and bounded disturbances. Acta Automatica Sinica, 2009, 35(3): 305-309 [19] Song G, Tao G. Adaptive state feedback control with sensor failure compensation for asymptotic output tracking. International Journal of Adaptive Control and Signal Processing, 2019, 33(1): 130-156 doi: 10.1002/acs.2958 [20] Ye D, Su L, Wang J L, Pan Y N. Adaptive reliable $ H_{\infty}$ optimization control for linear systems with time-varying actuator fault and delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1635-1643 doi: 10.1109/TSMC.2017.2656386[21] 胡庆雷, 张爱华, 李波. 推力器故障的刚体航天器自适应变结构容错控制. 航空学报, 2013, 34(4): 909-918Hu Qing-Lei, Zhang Ai-Hua, Li Bo. Adaptive variable structure fault tolerant control of rigid spacecraft under thruster faults. Acta Aeronautica et Astronautica Sinica, 2013, 34(4): 909-918 (in Chinese) [22] Liu L, Liu Y J, Li D P, Tong S C, Wang Z S. Barrier Lyapunov function based adaptive fuzzy FTC for switched systems and its applications to resistance inductance capacitance circuit system. IEEE Transactions on Cybernetics, 2020, 50(8): 3491-3502 doi: 10.1109/TCYB.2019.2931770 [23] Wang Z S, Liu L, Wu Y M, Zhang H G. Optimal fault-tolerant control for discrete-time nonlinear strict-feedback systems based on adaptive critic design. IEEE Tansactions on Neural Networks and Learning Systems, 2018, 29(6): 2179-2191 doi: 10.1109/TNNLS.2018.2810138 [24] Wen L Y, Tao G, Yang H, Jiang B. Adaptive Actuator failure compensation for possibly nonminimum-phase systems using control separation based LQ design. IEEE Transactions on Automatic Control, January 2019, 64(1): 143-158 doi: 10.1109/TAC.2018.2809719 [25] Ataei-Esfahani A, Wang Q. Robust failure compensation for a morphing aircraft model using a probabilistic approach. IEEE Transactions on Control Systems Technology, 2007, 15(2): 324-331 doi: 10.1109/TCST.2006.883188 [26] Shen Q K, Shi P, Wang S Y, Shi Y. Fuzzy adaptive control of a class of nonlinear systems with unmodeled dynamics. International Journal of Adaptive Control and Signal Processing, 2019, 33(4): 712-730 doi: 10.1002/acs.2980 [27] 后德龙, 王青, 董朝阳. 飞行器切换多胞系统执行机构失效自适应补偿控制. 控制与决策, 2014, 29(12): 2235-2241Hou De-Long, Wang Qing, Dong Chao-Yang. Adaptive actuator failure compensate control for switched polytopic system of flight vehicles. Control and Decision, 2014, 29(12): 2235-2241 (in Chinese) [28] 于进勇, 陈洁, 周绍磊, 顾文锦. 一类高超声速飞行器自适应容错控制器设计. 中国科学: 信息科学, 2012, 42(11): 1391-1402 doi: 10.1360/112012-455Yu Jin-Yong, Chen Jie, Zhou Shao-Lei, Gu Wen-Jin. Hypersonic aircraft adapative fault-tolerant controller design. Scientia Sinica Informationis, 2012, 42(11): 1391-1402 (in Chinese) doi: 10.1360/112012-455 [29] Zhang K K, Jiang B, Yan X G, Mao Z H, Polycarpou M M. Fault-tolerant control for systems with unmatched actuator faults and disturbances. IEEE Transactions on Automatic Control, 25 May 2020: 1-1, doi: 10.1109/TAC.2020.2997347 [30] Sastry S, Bodson M. Adaptive Control Stability Convergence and Robustness, Prentice Hall: Englewood Cliffs, NJ, 1989 [31] Liu L, Liu Y J, Tong S C, Chen C L P. Integral barrier Lyapunov function based adaptive control for switched nonlinear systems. Science China Information Sciences, March 2020, 63(3): 132203:1-132203:14 [32] Tang L, Li D J. Time-varying barrier Lyapunov function based adaptive neural controller design for nonlinear pure-feedback systems with unknown hysteresis. International Journal of Control, Automation, and Systems, July 2019, 17(7): 1642-1654 doi: 10.1007/s12555-018-0745-y [33] 任章, 廉成斌, 熊子豪. 高超声速飞行器强鲁棒自适应控制器设计新方法. 导航定位与授时, 2014, 1(1): 22-30 doi: 10.3969/j.issn.2095-8110.2014.01.005Ren Zhang, Lian Cheng-Bin, Xiong Zi-Hao. Novel design method of strength robustness adaptive controller for hypersonic vehicle. Navigation Positioning & Timing, 2014, 1(1): 22-30 (in Chinese) doi: 10.3969/j.issn.2095-8110.2014.01.005 [34] Narendra K S, Balakrishnan J. Improving transient response of adaptive control systems using multiple models and switching. IEEE Transactions on Automatic Control, 1994, 39(9): 1861-1866 doi: 10.1109/9.317113 [35] Narendra K S, Balakrishnan J. Adaptive control using multiple models. IEEE Transactions on Automatic Control, 1997, 42(2): 171-187 doi: 10.1109/9.554398 [36] Tan C, Tao G, Qi R Y, Yang H. A direct MRAC based multivariable multiple-model switching control scheme. Automatica, 2017, 84: 190-198 doi: 10.1016/j.automatica.2017.07.020 [37] Yao X L, Yang Y, Su M. A novel adaptive actuator failure compensation scheme based on multi-design integration for half-car active suspension system. Advances in Mechanical Engineering, 2019, 11(12): 1687814019894097. [38] Wang C, Wen C, Lin Y. Adaptive actuator failure compensation for a class of nonlinear systems with unknown control direction. IEEE Transactions on Automatic Control, 2016, 62(1): 385-392 [39] Yang Q, Ge S S, Sun Y. Adaptive actuator fault tolerant control for uncertain nonlinear systems with multiple actuators. Automatica, Oct 1 2015, 60: 92-99 doi: 10.1016/j.automatica.2015.07.006 [40] Tong S, Huo B, Li Y. Observer-based adaptive decentralized fuzzy fault-tolerant control of nonlinear large-scale systems with actuator failures. IEEE Transactions on Fuzzy Systems, Jan 21 2013, 22(1): 1-5 [41] Ouyang H, Lin Y. Adaptive fault-tolerant control for actuator failures: A switching strategy. Automatica, Jul 1 2017, 81: 87-95 doi: 10.1016/j.automatica.2017.03.014 [42] Wang H, Liu X, Liu P X, Li S. Robust adaptive fuzzy fault-tolerant control for a class of non-lower-triangular nonlinear systems with actuator failures. Information Sciences, Apr 1 2016, 336: 60-74 doi: 10.1016/j.ins.2015.12.008 [43] Wen L Y, Tao G, Yang H, Zhang Y J. An adaptive disturbance rejection control scheme for multivariable nonlinear systems. International Journal of Control, 2016, 89(3): 594-610 doi: 10.1080/00207179.2015.1088172 -

 下载:
下载:


计量
- 文章访问数: 1428
- HTML全文浏览量: 587
- PDF下载量: 318
- 被引次数: 0
