

-
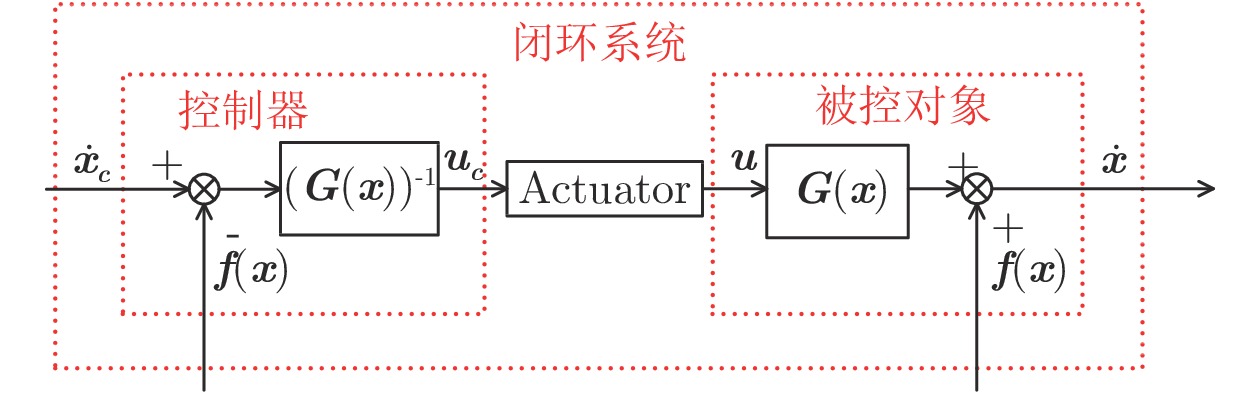
摘要: 本文从理论上分析了执行机构带宽对动态逆闭环控制系统动态特性影响, 发现较低的执行机构带宽会在伪线性系统中引入一个非线性干扰项, 为此提出了两种方法来消除这个非线性干扰项, 一个是采用参考模型的思想设计补偿器提高执行机构子系统的等效带宽, 另一个思路则是直接在非线性反馈项中引入补偿直接对消非线性干扰项. 仿真结果表明, 两类方法都能较好地消除非线性干扰项, 直接补偿方法能精确消除干扰项, 但需要准确动力学模型, 提高等效带宽的方法虽然是近似的, 但能方便地引入自适应算法, 可以抑制执行机构模型参数不确定的影响.Abstract: Through analyzing the influence of actuator bandwidth on dynamic characteristics of dynamic inverse close-loop control system, it is found that lower actuator bandwidth will introduce a nonlinear disturbance into pseudo-linear system, therefore, two methods are proposed to eliminate this nonlinear disturbance term, one is to use the idea of the reference model to design the compensator to improve the equivalent bandwidth of the actuator subsystem, the other idea is to introduce compensation directly into nonlinear feedback term to eliminate nonlinear disturbance. The simulation results show that both types of methods can eliminate nonlinear disturbance, the direct compensation method can accurately eliminate disturbance, but accurate dynamic model is needed, although the method by improving the equivalent bandwidth is approximate, it can easily introduce adaptive algorithm, which can restrain the influence of uncertain parameters of the actuator model.
-
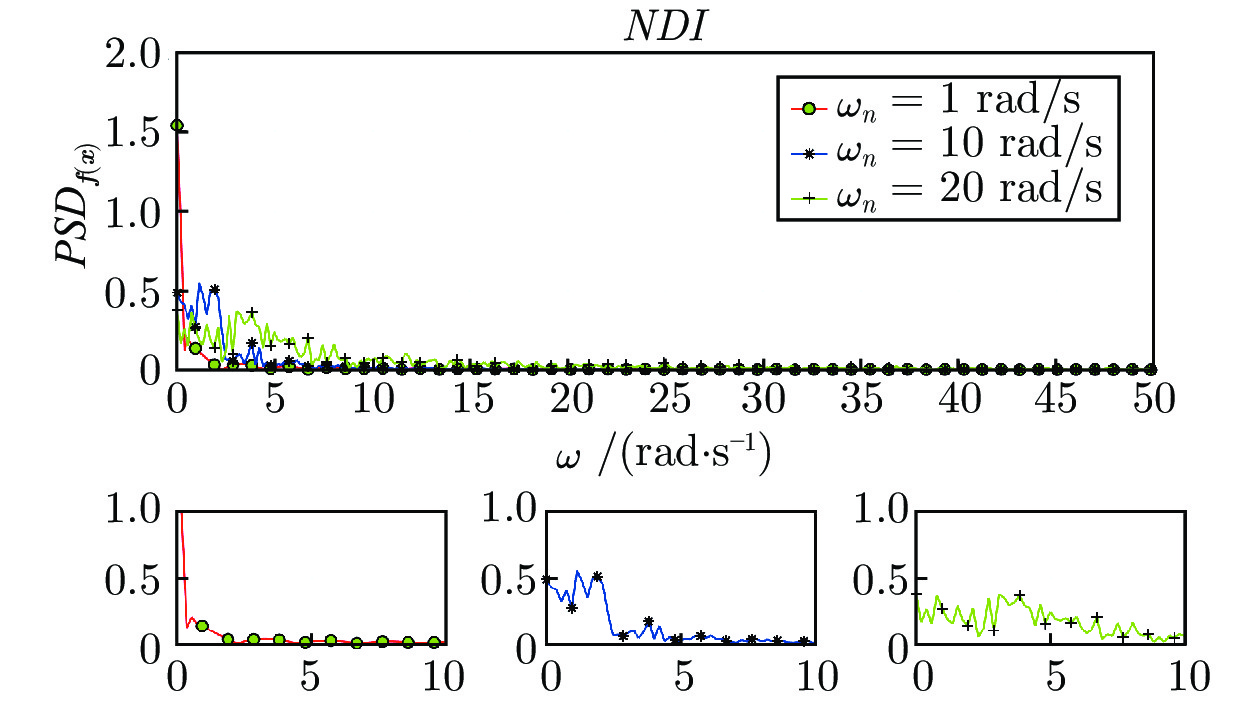
图 4 非线性干扰项
${{{{f}}}}\left({{x}}\right)$ 功率谱密度Fig. 4 Power spectral density of nonlinear interference term
${{{{f}}}}\left({{x}}\right)$ 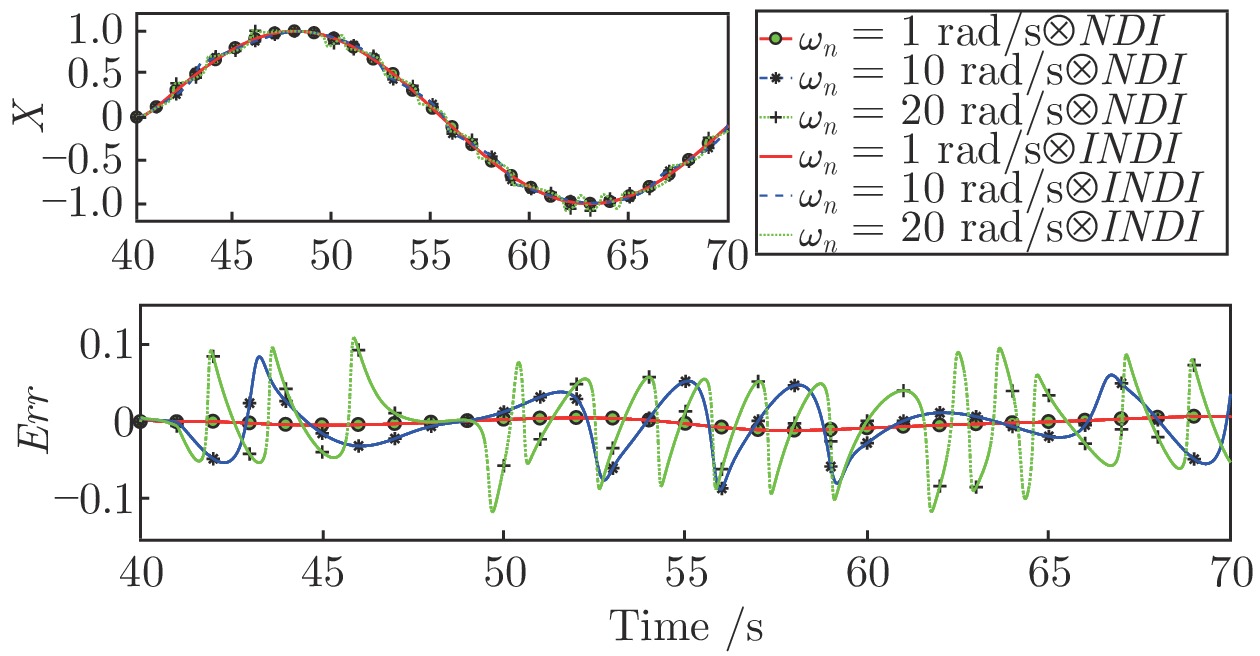
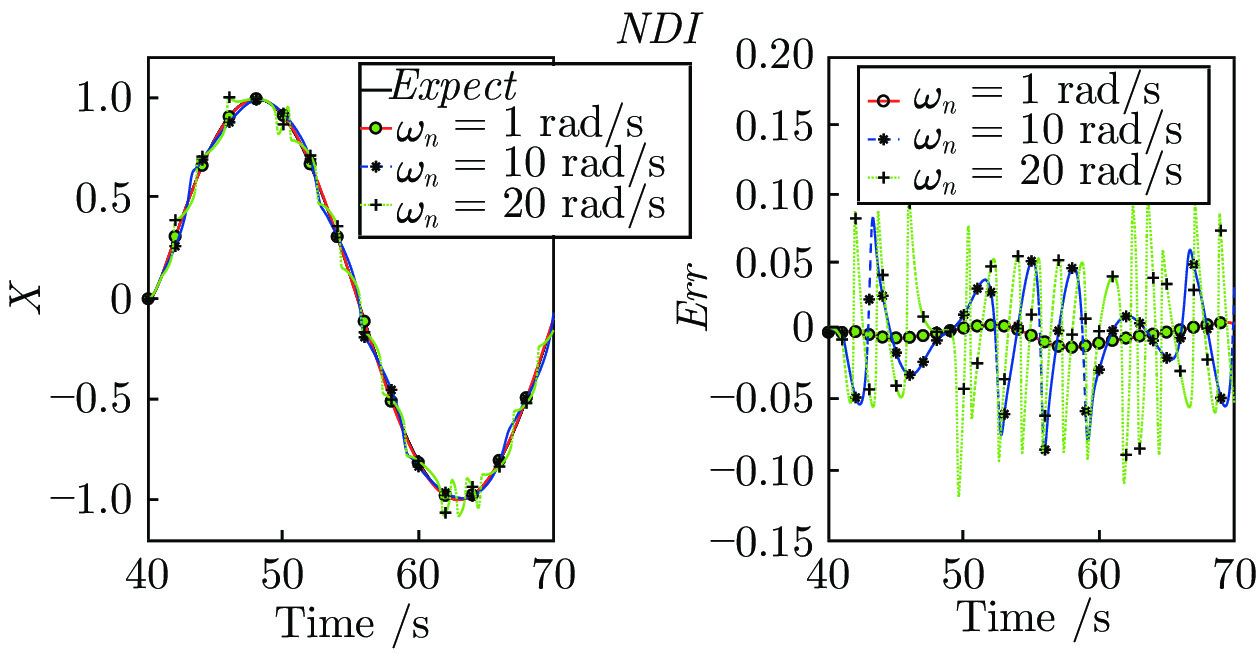
图 6 常规和增量动态逆仿真结果
Fig. 6 Conventional and incremental dynamic inverse simulation results

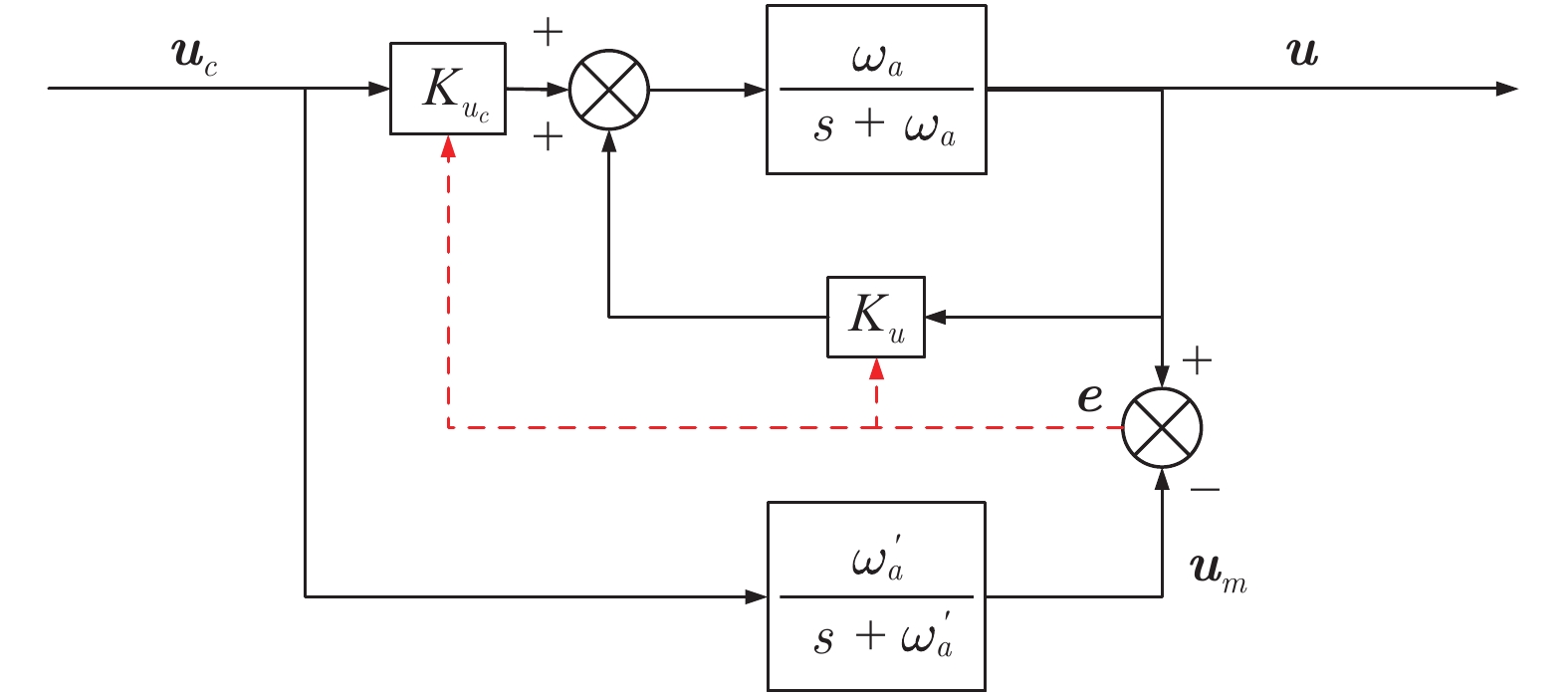
图 7 等效带宽方法仿真结果(
$ {\omega }_{a} $ 已知)Fig. 7 Simulation results of equivalent bandwidth method (
$ {\omega }_{a} $ Known)
图 8 等效带宽方法仿真结果(
$ {\omega }_{a} $ 未知)Fig. 8 Simulation results of equivalent bandwidth method (
$ {\omega }_{a} $ unknown)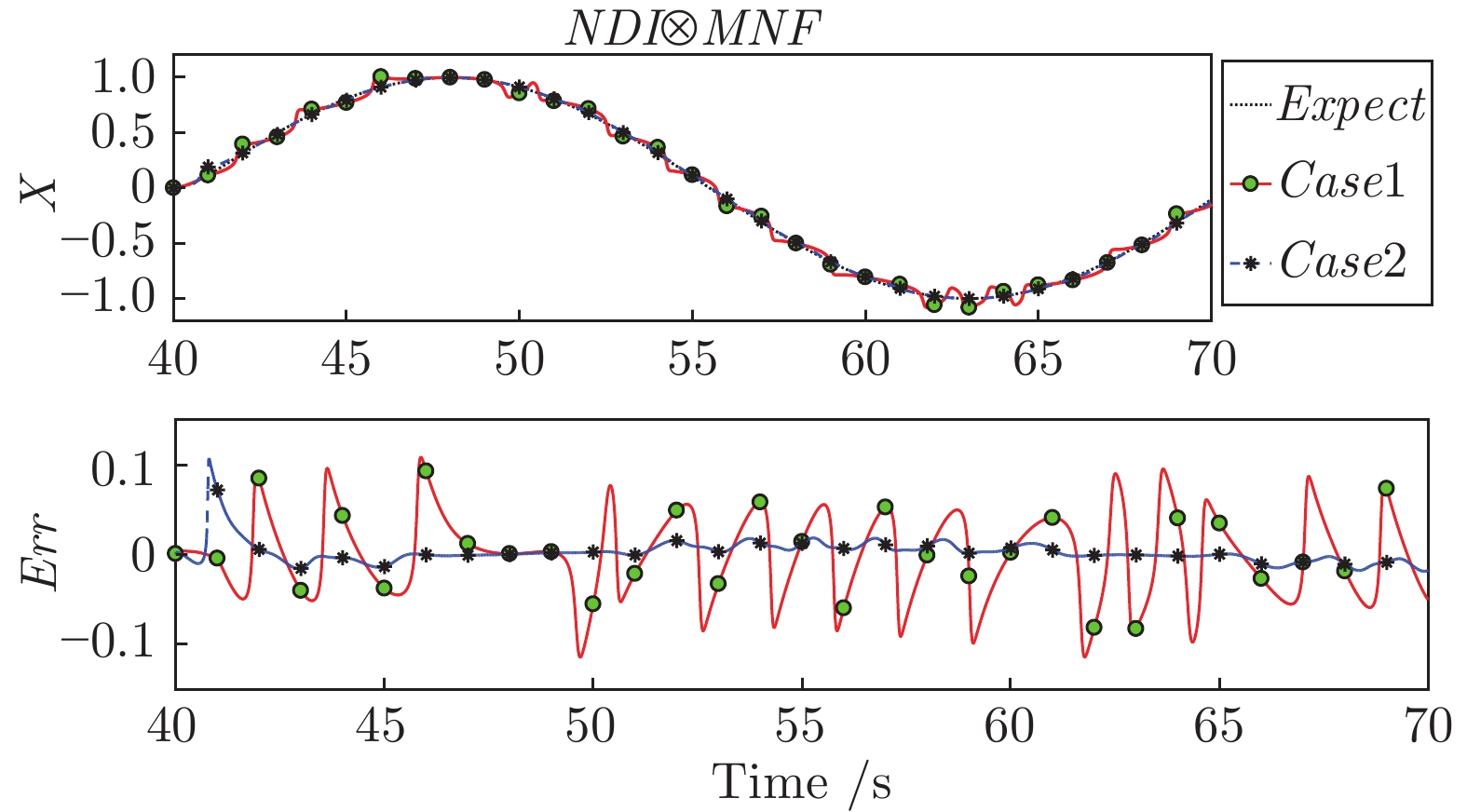
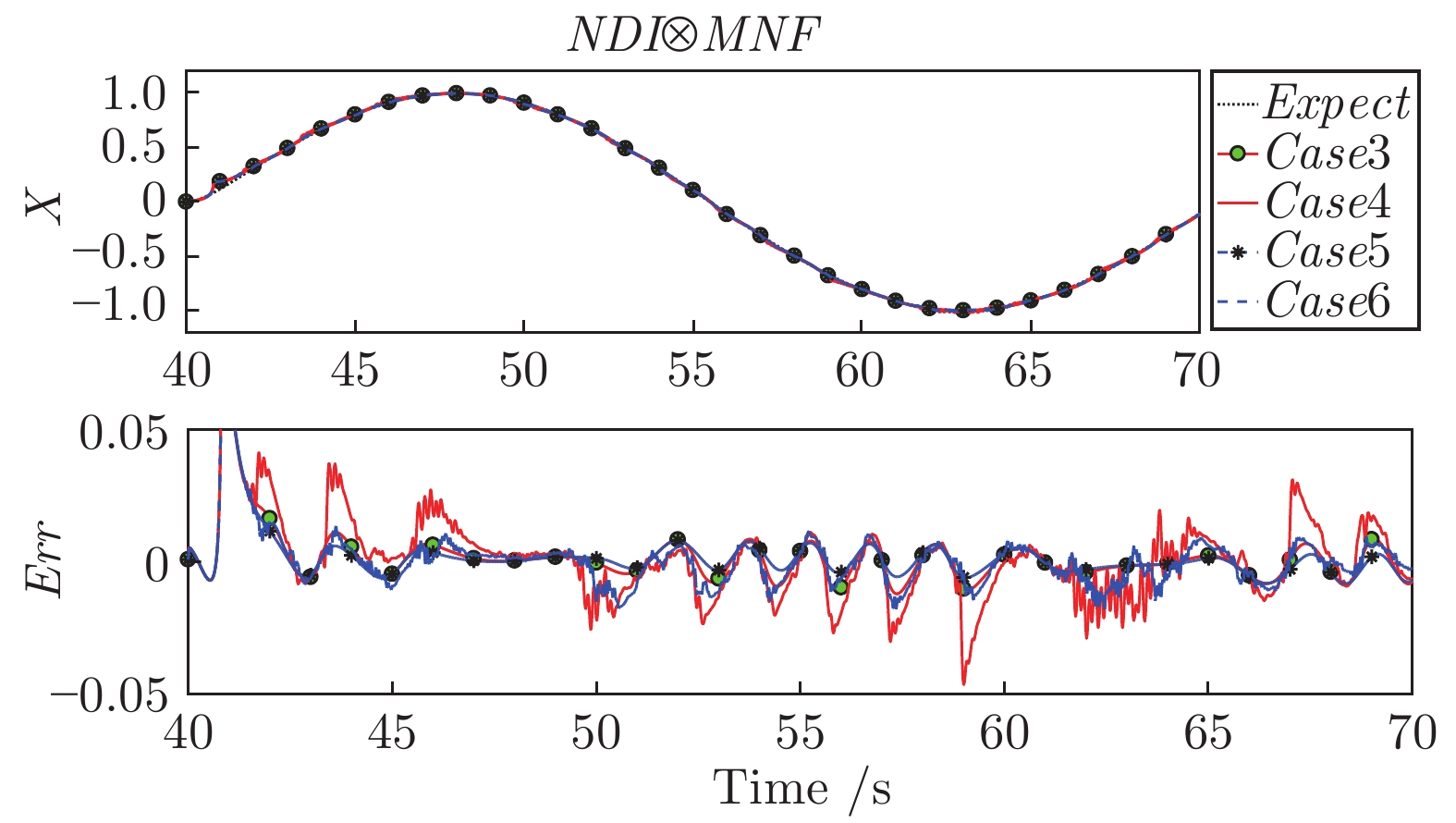
图 9 直接补偿方法仿真结果(不考虑噪声)
Fig. 9 Simulation results of direct compensation method (Without consideration of noise)
-
[1] Meyer G, Su R, Hunt L R. Application of nonlinear transformations to automatic flight control. Automatica, 1984, 1(20): 103−107 [2] Lane S H, Stengel R F. Flight control design using nonlinear inverse dynamics. Automatica, 1988, 24(4): 471−483 doi: 10.1016/0005-1098(88)90092-1 [3] Daniel J B, Dale F E. Nonlinear control law with application to high angle-of-attack flight. Journal of Guidance, Control and Dynamics, 1992, 15(3): 761−767 doi: 10.2514/3.20902 [4] Snell S A, Nns D F, Arrard W L. Nonlinear inversion flight control for a supermaneuverable aircraft. Journal of Guidance, Control, and Dynamics, 1992, 15(4): 976−984 doi: 10.2514/3.20932 [5] Da Costa R R, Chu Q P, Mulder J A. Reentry flight controller design using nonlinear dynamic iversion. Journal of Spacecraft and Rockets, 2003, 40(1): 64−71 doi: 10.2514/2.3916 [6] Roenneke A, Well K. Nonlinear flight control for a high-lift reentry vehicle. In: Proceedings of Guidance, Navigation, and Control Conference. Munich, Germany, 1995: 1798−1805 [7] Luca A D, Lucibello P, Ulivi A G. Inversion techniques for trajectory control of flexible robotarms. Journal of Robotic Systems, 1989, 6(4): 325−344 doi: 10.1002/rob.4620060403 [8] Furuta K, Okutani T, Sone H. Computer cont-rol of a double inverted pendulum. Computer & Electrical Engineering, 1978, 5(1): 67−84 [9] Hatakeyama N, Shimada A. Movement control using zero dynamics of two-wheeled inverted pendulum robot. IEEE International Workshop on Advanced Motion Control, 2013, 44(3): 38−43 [10] Enns D, Bugajski D, Hendrick R. Dynamic inversion: an evolving methodology for flight control design. International Journal of control, 1994, 59(1): 71−91 doi: 10.1080/00207179408923070 [11] Joshua H, John V. Direct L1 adaptive nonlinear dynamic inversion control for command augmentation systems. In: Proceedings of Guidance, Navigation, and Control Conference and Exhibit. Kissimmee, Florida, USA: AIAA, 2018. [12] Geiser M, Xargay E, Hovakimyan N, Bierling T, Holzapfel F. L1 adaptive augmented dynamic inversion controller for a high agility UAV. In: Proceedings of Guidance, Navigation, and Control Conference, Portland, Oregon, USA: AIAA, 2011. [13] Yang I, Kim D, Lee D. A flight control strategy using robust dynamic inversion based on sliding mode control. In: Proceedings of Guidance, Navigation, and Control Conference and Exhibit. Mi-nneapolis, Minnesota, USA: AIAA, 2012. [14] Smith P. A simplified approach to nonlinear dynamic inversion based flight control. In: Proceedings of the 23rd Atmospheric Flight Mechanics Conference. Boston, USA: AIAA, 1998. 762−770 [15] 陈海兵, 张曙光, 方振平. 加速度反馈的隐式动态逆鲁棒非线性控制律设计. 航空学报, 2009, 30(4): 597−603 doi: 10.3321/j.issn:1000-6893.2009.04.003Chen Hai-Bing, Zhang Shu-Guang, Fang Zhen-Ping. Implitcit NDI robust nonlinear controldesign with acceleration feedback. ACTA Aeronautica et Astronautica Sinica, 2009, 30(4): 597−603 doi: 10.3321/j.issn:1000-6893.2009.04.003 [16] Grondman F, Looye G H N, Kuchar R O, Chu Q P. Design and flight testing of incremental nonlinear dynamic inversion based control laws for a passenger aircraft. In: Proceedings of Guidance, Navigation, and Control Conference and Exhibit. Kissimmee, Florida, USA: AIAA, 2018. [17] Sieberking S, Chu Q P, Mulder J A. Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction. Journal of Guidance Control and Dynamics, 2010, 33(6): 1732−1742 doi: 10.2514/1.49978 [18] 周池军, 朱纪洪. 考虑作动器动态补偿的飞机增量滤波非线性控制. 控制理论与应用, 2017, 34(5): 594−600 doi: 10.7641/CTA.2017.60402Zhou Chi-Jun, Zhu Ji-Hong. Incremental filte-red nonlinear control for aircraft with actuator dynamics compensation. Control Theory and Applications, 2017, 34(5): 594−600 doi: 10.7641/CTA.2017.60402 [19] Slotine J J, Li W, Hall P. Applied Nonlinear Control. Englewood Cliffs, NewJersey: Prentice-Hall, Inc, 1991. 120−130 [20] 韩京清. 从PID技术到自抗扰控制技术. 控制工程, 2002, 9(3): 13−18 doi: 10.3969/j.issn.1671-7848.2002.03.003Han Jing-Qing. From PID technique to active disturbances rejection control technique. Control Engineering of China, 2002, 9(3): 13−18 doi: 10.3969/j.issn.1671-7848.2002.03.003 -

 下载:
下载:







计量
- 文章访问数: 1104
- HTML全文浏览量: 386
- PDF下载量: 145
- 被引次数: 0
