

-
摘要: 针对杂波环境下多机动扩展目标跟踪问题, 提出一种基于高斯过程的变结构多模型联合概率数据关联方法.首先, 采用期望模型扩展方法构建自适应模型集, 并对各个扩展目标状态进行初始化.其次, 基于高斯过程建立联合跟踪门以选择有效量测, 形成联合关联矩阵.然后, 拆分联合关联矩阵得到可行关联矩阵并求解关联事件概率.最后, 利用联合概率数据关联滤波器更新各个扩展目标的状态和协方差, 并将更新的状态进行融合, 得到最终的状态估计.仿真验证了所提方法的有效性.Abstract: Aiming at the problem of multiple maneuvering extended target tracking in clutter, a variable structure multiple model joint probabilistic data association method based on Gaussian process is proposed. Firstly, the adaptive model set is constructed by the expecting model augmentation method, and each extended target state is initialized. Secondly, based on the Gaussian process, the joint validation gate of extended target is established to select the valid measurements and to form the joint association matrix. Then, the joint association matrix is splitted to obtain the feasible association matrix and the probabilities of association events are calculated. Finally, the joint probabilistic data association filter is used to update the state and covariance of each extended target, and the updated states are fused to obtain the final state estimation. Simulation result verifies the effectiveness of the algorithm.
-
Key words:
- Gaussian process /
- multiple maneuvering extended target /
- expecting model augmentation /
- variable structure multiple model /
- joint probabilistic data association
1) 本文责任编委 赖剑煌 -
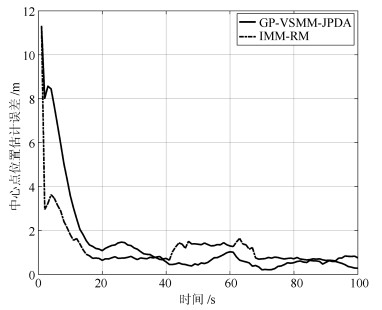
表 1 不同参数下两种方法的位置估计误差(m)
Table 1 Position estimation error of two algorithms against different parameters (m)
参数 参数值 IMM-RM GP-VSMM-JPDA $P_D$ 0.65 0.7890 0.6531 0.80 0.4307 0.3358 0.90 0.3189 0.2375 $\sigma_2$ 1.0 0.3189 0.2375 2.0 0.5735 0.4518 4.0 0.8306 0.7331  下载: 导出CSV
下载: 导出CSV
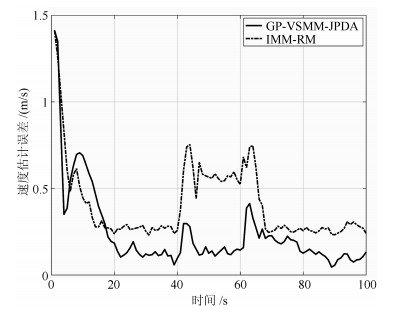
表 2 不同参数下两种方法的速度估计误差(m/s)
Table 2 Velocity estimation error of two algorithms against different parameters (m/s)
参数 参数值 IMM-RM GP-VSMM-JPDA $P_D$ 0.65 0.7890 0.6531 0.80 0.4307 0.3358 0.90 0.3189 0.2375 $\sigma_2$ 1.0 0.3189 0.2375 2.0 0.5735 0.4518 4.0 0.8306 0.7331
下载: 导出CSV
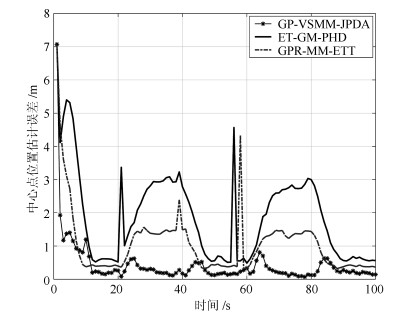
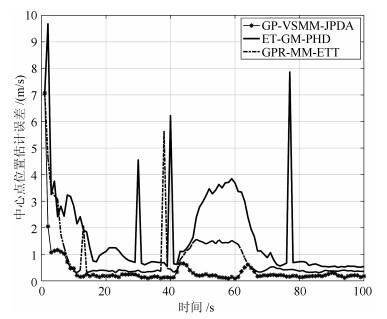
表 3 三种方法在不同参数下的中心点位置估计误差(m)
Table 3 Position estimation error of three algorithms against different parameters (m)
参数 参数值 ET-GM-PHD GPR-MM-ETT GP-VSMM-JPDA $P_D$ 目标1 目标2 目标3 目标1 目标2 目标3 目标1 目标2 目标3 0.65 1.3134 1.1359 1.1021 1.3025 0.9516 0.9383 0.9859 0.8447 0.8103 0.80 0.7723 0.6106 0.5863 0.5517 0.4731 0.4419 0.4561 0.4091 0.3947 0.95 0.6865 0.4563 0.4416 0.4330 0.3616 0.3501 0.2304 0.2197 0.2053 $\lambda_c\, /{\rm m}^{-2}$ 0.0001 0.5947 0.4132 0.3958 0.3245 0.2919 0.2767 0.2038 0.1825 0.1807 0.0002 0.6865 0.4563 0.4331 0.4330 0.3616 0.3501 0.2304 0.2197 0.2053 0.0004 1.1647 1.0537 0.9873 0.9107 0.8491 0.7904 0.7537 0.6735 0.6691
下载: 导出CSV
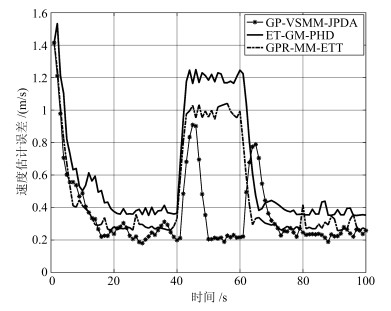
表 4 三种方法在不同参数下的速度估计误差
Table 4 Velocity estimation error of three algorithms against different parameters (m/s)
参数 参数值 ET-GM-PHD GPR-MM-ETT GP-VSMM-JPDA $P_D$ 目标1 目标2 目标3 目标1 目标2 目标3 目标1 目标2 目标3 0.65 0.8051 0.7340 0.7021 0.6418 0.5622 0.5141 0.5827 0.5136 0.4835 0.80 0.5380 0.5027 0.4715 0.4135 0.3947 0.3691 0.3968 0.3429 0.3152 0.95 0.4127 0.3901 0.3684 0.3241 0.3028 0.2731 0.2719 0.2708 0.2493 $\lambda_c\, /{\rm m}^{-2}$ 0.0001 0.3865 0.3310 0.3174 0.2907 0.2347 0.2109 0.2576 0.2178 0.1844 0.0002 0.4127 0.3901 0.3684 0.3241 0.3028 0.2731 0.2719 0.2708 0.2493 0.0004 0.7261 0.6317 0.5715 0.5108 0.4410 0.3947 0.4631 0.4147 0.3716
下载: 导出CSV
表 5 三种方法在不同参数下的正确航迹率
Table 5 Correct track probability of three algorithms against different parameters
参数 参数值 ET-GM-PHD GPR-MM-ETT GP-VSMM-JPDA $P_D$ 目标1 目标2 目标3 目标1 目标2 目标3 目标1 目标2 目标3 0.65 0.65 0.73 0.79 0.76 0.85 0.88 0.81 0.85 0.87 0.80 0.77 0.81 0.85 0.87 0.91 0.91 0.90 0.93 0.91 0.95 0.82 0.84 0.90 0.91 0.94 0.93 0.93 0.96 0.95 $\lambda_c\, /{\rm m}^{-2}$ 0.0001 0.88 0.93 0.93 0.93 0.97 0.94 0.95 0.97 0.96 0.0002 0.82 0.84 0.90 0.91 0.94 0.93 0.93 0.96 0.95 0.0004 0.71 0.77 0.85 0.82 0.85 0.87 0.84 0.88 0.87
下载: 导出CSV
-
[1] Li W L, Jia Y M. Gaussian mixture PHD filter for multiple maneuvering extended targets tracking. In: Proceedings of Conference on Decision and Control and European Control Conference. Orlando, F L, USA: IEEE, 2011. 2411-2415 [2] Hernandez M L, Ristic B, Farina A. Performance measure for markovian switching systems using best-fitting Gaussian distribution. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(2): 724-747 doi: 10.1109/TAES.2008.4560217 [3] Mahler R. PHD filters for nonstandard targets, I: Extended targets. In: Proceedings of the 12th International Conference on Information Fusion. Piscataway, NJ, USA: 2009. 915-921 [4] 田森平, 周波, 戚其丰.基于高斯混合PHD滤波的多机动扩展目标跟踪.中南大学学报:自然科学版, 2013, 44(12): 4923-4929 http://www.cnki.com.cn/Article/CJFDTotal-ZNGD201312022.htmTian Sen-Ping, Zhou Bo, Qi Qi-Feng. Gaussian mixture PHD filter based tracking multiple maneuvering extended targets. Journal of Central South University: Science and Technology, 2013, 44(12): 4923-4929 http://www.cnki.com.cn/Article/CJFDTotal-ZNGD201312022.htm [5] 李翠芸, 王精毅, 姬红兵.高斯过程回归下的多机动扩展目标跟踪.西安电子科技大学学报:自然科学版, 2017, 44(6): 1001-1007 http://www.cqvip.com/QK/95202X/201706/673936653.htmlLi Cui-Yun, Wang Jing-Yi, Ji Hong-Bing. Multiple maneuvering extended targets tracking with Gaussian process regression. Journal of XIDIAN University: Science and Technology, 2017, 44(6): 1001-1007 http://www.cqvip.com/QK/95202X/201706/673936653.html [6] Guo Y F, Li Y, Xue A K, Tharmarasa R, Kirubarajan T. Simultaneous tracking of a maneuvering ship and its wake using Gaussian process. Signal Processing, 2020, 172: 107547 doi: 10.1016/j.sigpro.2020.107547 [7] Wahlstrom N, Ozkan E. Extended target tracking using Gaussian processes. IEEE Transactions on Signal Processing, 2015, 63(16): 4165-4178 doi: 10.1109/TSP.2015.2424194 [8] Vermaak J, Ikoma N, Godsill S. Sequential Monte Carlo framework for extended object tracking. IEEE Proceedings: Radar, Sonar and Navigation, 2005, 152(5): 353-363 doi: 10.1049/ip-rsn:20045044 [9] Rrsmussen C, Williams C. Gaussian Processes for Machine Learning. Cambridge, MA, USA: MIT Press, 2016. [10] Huber M F. Recursive Gaussian process: Online regression and learning. Pattern Recognition Letters, 2014, 45: 12-19 [11] Kirubarajan T, Bar-shalom Y. Probabilistic data association techniques for target tracking in clutter. In: Proceedings of the IEEE. 2004. 92(3): 536-557 doi: 10.1109/JPROC.2003.823149 [12] Baum M, Hanebeck U. Extended object tracking with random hypersurface models. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 149-159 doi: 10.1109/TAES.2013.120107 [13] Chen B, Tugnait J K. Tracking of multiple maneuvering targets in clutter using IMM/JPDA filtering and fixed lag smoothing. Automatica, 2001, 37: 239-249 doi: 10.1016/S0005-1098(00)00158-8 [14] Li X R, Jilkov V P, Ru J. Multiple-model estimation with variable structure--Part VI: Expected-mode augmentation. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(3): 853-867 doi: 10.1109/TAES.2005.1541435 [15] Guo Y F, Li Y, Tharmarasa R, Kirubarajan T. GP-PDA for extended target tracking with measurement origin uncertainty. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(4): 1640-1655 doi: 10.1109/TAES.2018.2874147 [16] Fortmann T E, Bar-shalom Y, Scheffe M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE Journal of Oceanic Engineering, 1983, 8(3): 173-184 doi: 10.1109/JOE.1983.1145560 [17] Bar-shalom Y, Li X R, Kirubarajan T. Estimation with Applications to Tracking and Navigation. New York: Wiley, 2001. [18] Lan J, Li X R. Tracking of extended object or target group using random matrix: New model and approach. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(6): 2973-2989 doi: 10.1109/TAES.2016.130346 [19] Granstrom K, Lundquist C, Orguner U. Extended target tracking using Gaussian mixture PHD filter. IEEE Transaction in Aerospace and Electronic Systems, 2012, 48(4): 3268-3286 doi: 10.1109/TAES.2012.6324703 -

 下载:
下载:




计量
- 文章访问数: 1684
- HTML全文浏览量: 315
- PDF下载量: 310
- 被引次数: 0
