

Research on Capturing Target of Space Inflatable Net Capture System Based on Active Disturbance Rejection Control
-
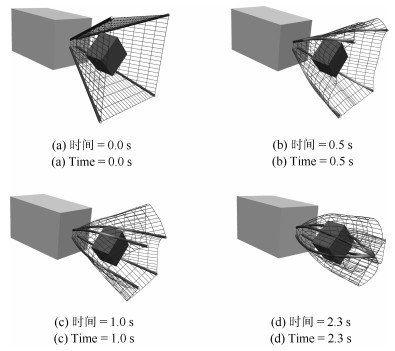
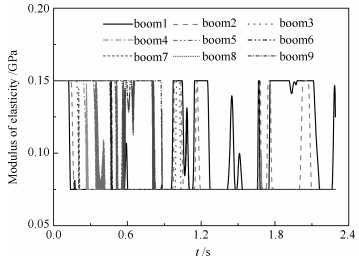
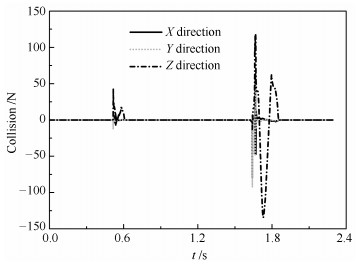
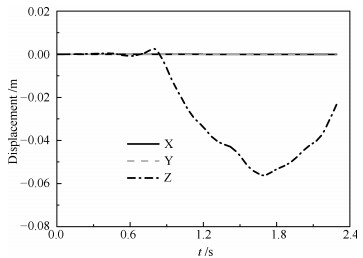
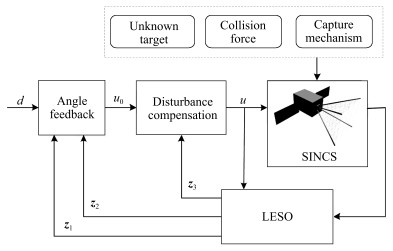
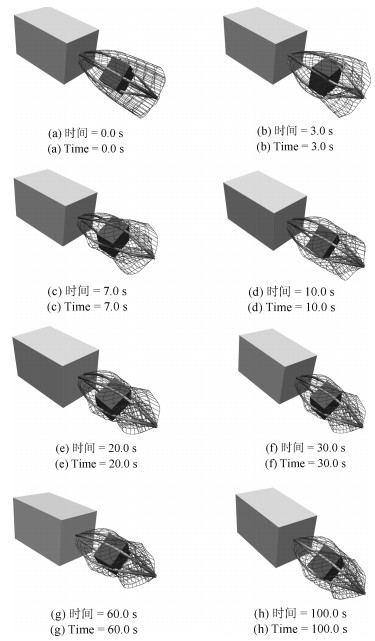
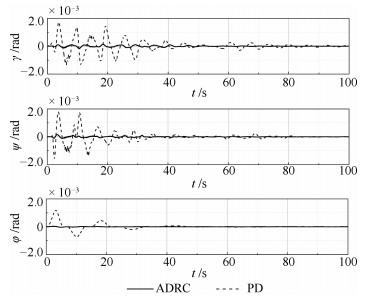
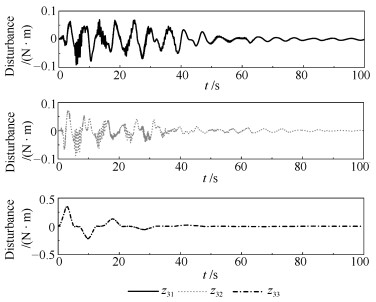
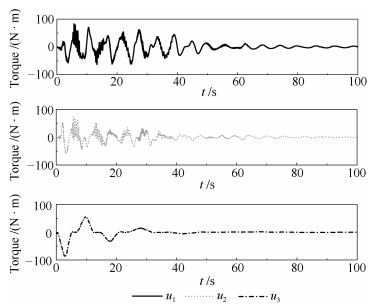
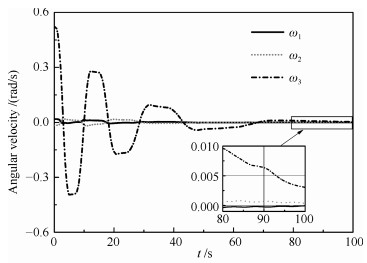
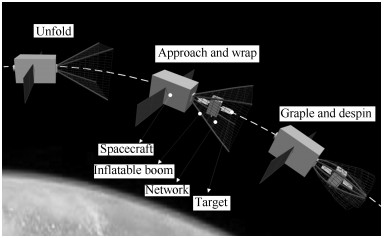
摘要: 空间充气展开绳网系统是依靠充气梁展开绳网进行目标捕获的航天器系统,具有更好的稳定性和可操控性.然而由于充气梁和绳网的大柔性变形以及捕获失稳自旋目标后的未知碰撞,使得捕获后的航天器姿态稳定控制困难.本文主要基于自抗扰控制解决了空间充气展开绳网系统捕获目标后的姿态稳定和消旋难题.首先,基于理想薄膜充压失效理论和绝对节点坐标方法建立充气展开绳网系统动力学模型,而后设计了航天器姿态稳定自抗扰控制器,用于实时估计并补偿系统捕获过程中未知惯量目标与捕获机构的碰撞干扰.仿真结果表明,动力学模型能够模拟捕获过程中充气梁的屈曲失效及碰撞特性,自抗扰控制器能够有效抑制碰撞带来的干扰,实现空间充气展开绳网系统捕获后的高精度姿态稳定控制,同时能够在有限时间内对自旋目标实现消旋.Abstract: Space inflatable net capture system (SINCS) relying on an inflatable beam to deploy nets for target acquisition is proposed for space-object capture, which has more stability and controllability. However, target capture process and attitude stabilization control of SINCS are not completely understood due to large flexible deformation of inflatable nets and unknown collisions after capturing unstable spinning targets. This paper mainly solves the problem of attitude stabilization and racemization of SINCS after capturing target based on active disturbance rejection control (ADRC). Firstly, the flexible multibody dynamic model of SINCS is established based on the failure theory of ideal thin film under pressure and absolute nodal coordinate formulation. Then, an active disturbance rejection control is designed to estimate and compensate the collision between the unknown inertia target and the acquisition mechanism in real time. Simulation results show that the capturing process for non-cooperative targets could reflect the buckling failure of the inflatable boom and collision characteristics. The ADRC controller could estimate and compensate the disturbances effectively. The excellent performance of the ADRC control law meets the requirement of spacecraft attitude stabilization control after capturing unstable spinning targets. Furthermore, it is found that the target can achieve racemization in a limited time.1) 本文责任编委 许斌
-
表 1 服务航天器和捕获目标参数
Table 1 Parameters of spacecraft and target
Name Value Rotational inertia of spacecraft
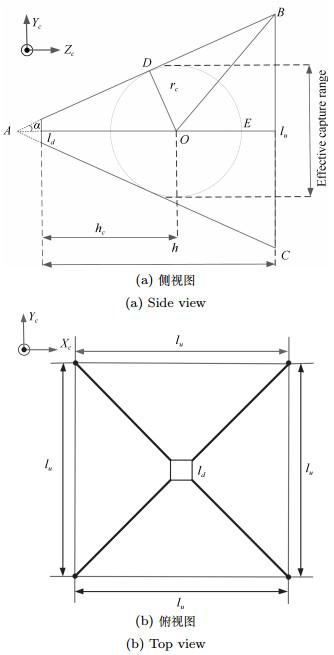
(kg·m2)diag{900, 800, 1 000} Size of spacecraft (m) 2.5×2.5×4 Size of capture mechanism (m) ${l_d} = 0.4, {l_u} = 4, h = 4$ Rotational inertia of target ($\rm {kg\cdot{m^2}}$) diag{500, 500, 700} Size of target (m) 1.3×1.3×1.0  下载: 导出CSV
下载: 导出CSV
表 2 绳网和充气梁参数
Table 2 Parameters of net and inflatable boom
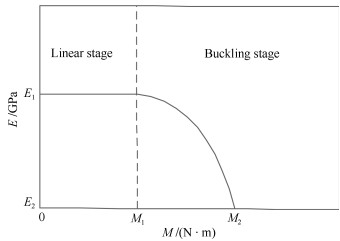
Name Nets Inflatable booms Diameter (m) 0.006 0.1 Density ($\rm {kg/{m^2}}$) 1 430 64 Poisson ratio 0.3 0.3 Modulus of elasticity (GPa) 12 ${E_1}=0.15, {E_2}=0.075$ Bending moment ($\rm {N\cdot{m}}$) - ${M_1}=5, {M_2}=10$
下载: 导出CSV
-
[1] Shan M H, Guo J, Gill E. Review and comparison of active space debris capturing and removal methods. Progress in Aerospace Sciences, 2016, 80:18-32 doi: 10.1016/j.paerosci.2015.11.001 [2] Botta E M, Sharf I, Misra A K. Contact dynamics modeling and simulation of tether nets for space-debris capture. Journal of Guidance, Control, and Dynamics, 2017, 40(1):110-123 doi: 10.2514/1.G000677 [3] Zhao Y K, Huang P F, Zhang F, Meng Z J. Contact dynamics and control for tethered space net robot. IEEE Transactions on Aerospace and Electronic Systems, 2018:1-1 [4] Shan M H, Guo J, Gill E. Deployment dynamics of tethered-net for space debris removal. Acta Astronautica, 2017, 132:293-302 doi: 10.1016/j.actaastro.2017.01.001 [5] Medina A, Cercos L, Stefanescu R M, Benvenuto R, Pesce V, Marcon M. Validation results of satellite mock-up capturing experiment using nets. Acta Astronautica, 2017, 134:314-332 doi: 10.1016/j.actaastro.2017.02.019 [6] Zhang F, Huang P F, Meng Z J. Dynamics analysis and controller design for maneuverable tethered space net robot. Journal of Guidance, Control, and Dynamics, 2017, 40(11):2828-2843 doi: 10.2514/1.G002656 [7] Forshaw J L, Aglietti G S, Salmon T, Retat I, Roe M, Roe M. Final payload test results for the RemoveDebris active debris removal mission. Acta Astronautica, 2017, 138:326-342 doi: 10.1016/j.actaastro.2017.06.003 [8] Schenk M, Viquerat A D, Seffen K A, Guest S D, Roe M, Burges C. Review of inflatable booms for deployable space structures:packing and rigidization. Journal of Spacecraft and Rockets, 2014, 51(3):762-778 doi: 10.2514/1.A32598 [9] 陈帅, 李斌, 杨智春.薄膜充气结构承弯性能的理论分析方法.机械强度, 2011, 33(3):403-410 http://d.old.wanfangdata.com.cn/Periodical/jxqd201103017Chen Shuai, Li Bin, Yang Zhi-Chun. Theoretical methods of bending characteristics analysis of membarne inflatable structures. Journal of Mechanical Strength, 2011, 33(3):403-410 http://d.old.wanfangdata.com.cn/Periodical/jxqd201103017 [10] Ceruti A, Pettenuzzo S, Tuveri M. Conceptual design and preliminarily structural analysis of inflatable basket for an asteroid capturing satellite. Strojniki Vestnik——Journal of Mechanical Engineering, 2015, 61(5):341-351 doi: 10.5545/sv-jme [11] Roychoudhury R, Bandyopadhyay S, Paul K. Junk hunter: autonomous rendezvous, capture, and de-orbit of orbital debris. In: Proceedings of the AIAA SPACE 2011 Conference and Exposition. Long Beach, USA: 2011. 7292 [12] 金辉宇, 刘丽丽, 兰维瑶.二阶系统线性自抗扰控制的稳定性条件.自动化学报, 2018, 44(9):1725-1728 http://www.aas.net.cn/CN/abstract/abstract19354.shtmlJin Hui-Yu, Liu Li-Li, Lan Wei-Yao. On stability condition of linear active disturbance rejection control for second-order systems. Acta Automatica Sinica, 2018, 44(9):1725-1728 http://www.aas.net.cn/CN/abstract/abstract19354.shtml [13] Gao C, Yuan Jian P, Zhao Y K. ADRC for spacecraft attitude and position synchronization in libration point orbits. Acta Astronautica, 2018, 145:238-249 doi: 10.1016/j.actaastro.2018.01.039 [14] 田嘉懿, 张士峰, 刘龙斌.多星发射上面级主动抗扰姿态控制技术研究.自动化学报, 2018, 44(2):228-239 http://www.aas.net.cn/CN/abstract/abstract19218.shtmlTian Jia-Yi, Zhang Shi-Feng, Liu Long-Bin. Study on active disturbance reject attitude control technology of multi-satellite upper stage. Acta Automatica Sinica, 2018, 44(2):228-239 http://www.aas.net.cn/CN/abstract/abstract19218.shtml [15] Zhang D Y, Wu Q H, Yao X L, Jiao L L. Active disturb-ance rejection control for looper tension of stain-less steel strip processing line. Control Engi-neering and Applied Informatics, 2018, 20(4):60-68 [16] 程赟, 陈增强, 孙明玮, 孙青林.多变量逆解耦自抗扰控制及其在精馏塔过程中的应用.自动化学报, 2017, 43(6):1080-1088 http://www.aas.net.cn/CN/abstract/abstract19083.shtmlCheng Yun, Chen Zeng-Qiang, Chen Ming-Wei, Sun Qing-Lin. Multivariable inverted decoupling active disturbance rejection control and its application to a distillation column process. Acta Automatica Sinica, 2017, 43(6):1080-1088 http://www.aas.net.cn/CN/abstract/abstract19083.shtml [17] Gerstmayr J, A. Shabana A. Analysis of thin beams and cables using the absolute nodal coordinate formulation. Nonlinear Dynamics, 2006, 45:109-130 doi: 10.1007/s11071-006-1856-1 [18] Comer R L, Levy S. Deflections of an inflated circular-cylindrical cantilever beam. AIAA journal, 1963, 1(7):1652-1655 doi: 10.2514/3.1873 [19] 王长国, 杜星文, 赫晓东.充气薄膜管的弯皱行为分析.工程力学, 2009, 26(2):210-215 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gclx200902034Wang Chang-Guo, Du Xing-Wen, He Xiao-Dong. Bending-wrinkling benavior analysis. Engineering Mechanics, 2009, 26(2):210-215 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gclx200902034 [20] Mbdyn Software and Documentation[Online], available: http://www.rapidyn.cn, December 30, 2018 [21] Gao Z Q. Scaling and bandwidth-parameterization based controller tuning. In: Proceedings of the 2003 American Control Conference. Denver, USA: IEEE, 2003. 4989-4996 -

 下载:
下载:


图(16) / 表(2)
计量
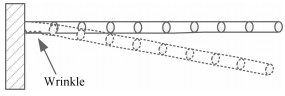
- 文章访问数: 1882
- HTML全文浏览量: 353
- PDF下载量: 107
- 被引次数: 0
