

Self-tuning Distributed Fusion Estimation for Systems With Unknown Model Parameters and Fading Measurement Rates
-
摘要: 研究了带未知模型参数和衰减观测率多传感器线性离散随机系统的信息融合估计问题.在模型参数和衰减观测率未知的情形下, 应用递推增广最小二乘(Recursive extend least squares, RELS)算法和加权融合估计算法提出了分布式融合未知模型参数辨识器; 应用相关函数对描述衰减观测现象的随机变量的数学期望和方差进行在线辨识.将辨识后的模型参数、数学期望和方差代入到最优分布式融合状态滤波器中, 获得了相应的自校正融合状态滤波算法.应用动态误差系统分析(Dynamic error system analysis, DESA)方法证明了算法的收敛性.仿真例子验证了算法的有效性.Abstract: This paper is concerned with the information fusion estimation problem for multi-sensor linear discrete-time stochastic systems with unknown model parameters and fading measurement rates. When the model parameters and fading measurement rates are unknown, a distributed weighted fusion identifier for the unknown model parameters is presented based on the recursive extend least squares (RELS) algorithm and weighted fusion estimation algorithm. Both the mathematical expectations and variances of random variables which describe the phenomena of fading measurements are identified by using the correlation functions. The corresponding self-tuning distributed fusion state filtering algorithm is obtained by substituting the identified model parameters, the mathematical expectations and variances into the optimal distributed fusion state filter. The convergence of the proposed algorithms is proven by using a dynamic error system analysis (DESA) method. A simulation example shows the effectiveness of the proposed algorithms.
-
Key words:
- Recursive extend least squares (RELS) /
- correlation function /
- unknown model parameter /
- unknown fading measurement rate /
- self-tuning fusion estimation
1) 本文责任编委 张俊 -

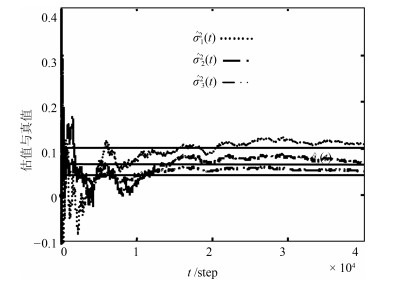
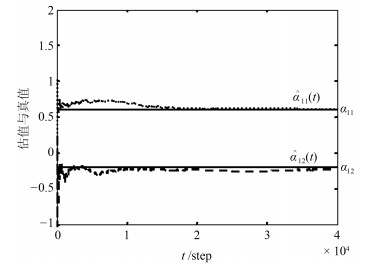
图 4 $\mu_{i}(t)$的数学期望辨识
Fig. 4 Identification of Mathematical expectation of $\mu_{i}(t)$
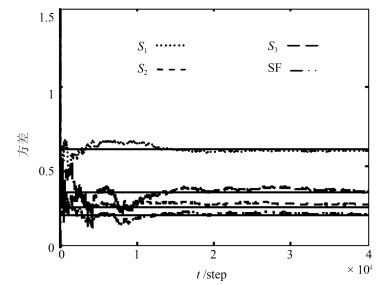
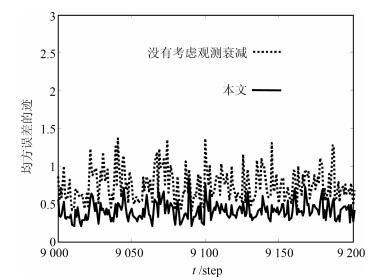
图 8 局部、融合最优与自校正状态分量1的滤波误差方差
Fig. 8 Variance of the first state component of local, fusion optimal and self-tuning filters

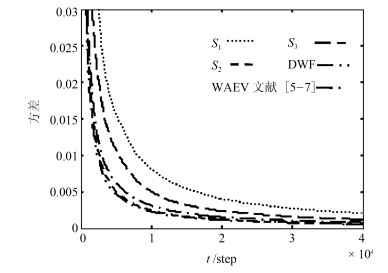
图 9 局部、融合最优与自校正状态分量2的滤波误差方差
Fig. 9 Variance of the second state component of local, fusion optimal and self-tuning filters
-
[1] Anderson B D O, Moore J B. Optimal Filtering. Englewood Cliffs, NJ: Prentice-Hall, 1979. [2] 邓自立, 李春波.按对角阵加权自校正信息融合Kalman预报器及其收敛性分析.自动化学报, 2007, 33(2): 156-163 doi: 10.1360/aas-007-0156Deng Zi-Li, Li Chun-Bo. Self-tuning information fusion Kalman predictor weighted by diagonal matrices and its convergence analysis. Acta Automatica Sinica, 2007, 33(2): 156-163 doi: 10.1360/aas-007-0156 [3] Gao Y, Jia W J, Sun X J, Deng Z L. Self-tuning multisensor weighted measurement fusion Kalman filter. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(1): 179-191 doi: 10.1109/TAES.2009.4805272 [4] Dou Y F, Sun S L, Ran C J. Self-tuning full-order wmf Kalman filter for multisensor descriptor systems. IET Control Theory & Applications, 2017, 11(3): 359-368 [5] Ran C J, Gu L, Deng Z L. Self-tuning centralized fusion Kalman filter for multisensor systems with companion form and its convergence. In: Proceedings of 8th IEEE International Confewence on Control and Automation. Xiamen, China: IEEE, 2010. 645-650 [6] 陶贵丽, 邓自立.含未知参数的自校正融合Kalman滤波器及其收敛性.自动化学报, 2012, 38(1): 109-119 doi: 10.3724/SP.J.1004.2012.00109Tao Gui-Li, Deng Zi-Li. Self-tuning fusion Kalman filter with unknown parameters and its convergence. Acta Automatica Sinica, 2012, 38(1): 109-119 doi: 10.3724/SP.J.1004.2012.00109 [7] Ran C J, Deng Z L. Self-tuning weighted measurement fusion Kalman filtering algorithm. Computational Statistics & Data Analysis, 2012, 56 (6): 2112-2128 [8] 游科友, 谢立华, 网络控制系统的最新研究综述, 自动化学报, 2013, 39(2): 101-118 doi: 10.3724/SP.J.1004.2013.00101You Ke-You, Xie Li-Hua. Survey of recent progress in networked control systems. Acta Automatica Sinica, 2013, 39(2): 101-118 doi: 10.3724/SP.J.1004.2013.00101 [9] Sun S L, Xie L H, Xiao W D, Yeng C S. Optimal linear estimation for systems with multiple packet dropouts. Automatica, 2008, 44(5): 1333-1342 doi: 10.1016/j.automatica.2007.09.023 [10] Ma J, Sun S L. Information fusion estimators for systems with multiple sensors of different packet dropout rates. Information Fusion, 2011, 12(3): 213-222 doi: 10.1016/j.inffus.2010.11.003 [11] Nahi N E. Optimal recursive estimation with uncertain observation. IEEE Transactions on Information Theory, 1969, 15(4): 457-462 doi: 10.1109/TIT.1969.1054329 [12] 孙书利.具有一步随机滞后和多丢包的网络系统的最优线性估计.自动化学报, 2012, 38(3): 349-356 doi: 10.3724/SP.J.1004.2012.00349Sun Shu-Li. Optimal linear estimation for networked systems with one-step random delays and multiple packet dropouts. Acta Automatica Sinica, 2012, 38(3): 349-356 doi: 10.3724/SP.J.1004.2012.00349 [13] 李娜, 马静, 孙书利.带多丢包和滞后随机不确定系统的最优线性估计.自动化学报, 2015, 41(3): 611-619 doi: 10.16383/j.aas.2015.c140484Li Na, Ma Jing, Sun Shu-Li. Optimal linear estimation for stochastic uncertain systems with multiple packet dropouts and delays. Acta Automatica Sinica, 2015, 41(3): 611-619 doi: 10.16383/j.aas.2015.c140484 [14] Wang S Y, Fang H J, Tian X G. Minimum variance estimation for linear uncertain systems with one-step correlated noises and incomplete measurements. Digital Signal Processing, 2016, 49(C): 126-136 [15] R Caballero Águila, A Hermoso Carazo, J Linares Pérez. Fusion estimation using measured outputs with random parameter matrices subject to random delays and packet dropouts. Signal Processing, 2016, 127(C): 12-23 [16] R Caballero Águila, A Hermoso Carazo, J Linares Pérez. Distributed fusion filters from uncertain measured outputs in sensor networks with random packet losses. Information Fusion, 2017, 34: 70-79 doi: 10.1016/j.inffus.2016.06.008 [17] Zhang W A, Yu L, Feng G. Optimal linear estimation for networked systems with communication constraints. Automatica, 2011, 47(9): 1992-2000 doi: 10.1016/j.automatica.2011.05.020 [18] Sun S L, Tian T, Lin H L. State estimators for systems with random parameter matrices, stochastic nonlinearities, fading measurements and correlated noises. Information Sciences, 2017, s397-398: 118-136 [19] Hu J, Wang Z D, Gao H J. Recursive filtering with random parameter matrices, multiple fading measurements and correlated noises. Automatica, 2013, 19(11): 3440-3448 [20] Subhrakanti Dey, Alex S Leong, Jamie S Evans. Kalman filtering with faded measurements. Automatica, 2009, 45(10): 2223-2233 doi: 10.1016/j.automatica.2009.06.025 [21] Sun S L, Peng F F, Lin H L. Distributed asynchronous fusion estimator for stochastic uncertain systems with multiple sensors of different fading measurement rates. IEEE Transactions on Signal Processing, 2018, 66(3): 641-653 doi: 10.1109/TSP.2017.2770102 [22] Lin H L, Sun S L. Optimal sequential fusion estimation with stochastic parameter perturbations, fading measurements, and correlated noises. IEEE Transactions on Signal Processing, 2018, 66(13): 3571-3583 doi: 10.1109/TSP.2018.2831642 [23] Sun S L, Deng Z L. Multi-sensor optimal information fusion Kalman filter. Automatica, 2004, 40(6): 1017-1023 doi: 10.1016/j.automatica.2004.01.014 [24] 邓自立.信息融合估计理论及其应用.北京:科学出版社, 2012.Deng Zi-Li. Information Fusion Estimation Theory and Applications. Beijing: Science Press, 2012. -

 下载:
下载:



图(10)
计量
- 文章访问数: 1260
- HTML全文浏览量: 292
- PDF下载量: 182
- 被引次数: 0
