

A Fast Covariance Intersection Fusion Algorithm and Its Application
-
摘要:
针对分布式传感网络系统中存在互协方差未知的情形, 融合系数的科学设计对于融合性能至关重要. 本文以各节点估计方差矩阵逆的迹的倒数作为计算融合系数的中间变量, 设计了一种序贯快速协方差交叉融合算法, 可以显著减少各个融合节点的计算量, 能够保证各融合节点融合结果相同. 在给定系统的误差方差上界约束与优化指标前提下, 该融合算法结合粒子群优化算法, 能够给出对分布式系统中各个节点的传感器精度要求. 工程实践中, 可为传感器的选型提供理论依据. 最后, 给出了一个分布式网络传感器精度选型的算例及快速协方差交叉融合算法在雷达网中的应用实例.
Abstract:In the distributed sensor net-system with unknown cross-covariance, the design of fusion coefficients is crucial for the fusion performance. In this paper, a fast covariance intersection algorithm is presented, which can significantly reduce the computational complexity of each fusion node and ensure that the fusion result of each node is the same. The new fusion coefficients can be calculated straightforward by taking the reciprocal of the trace of the inverse variances as local fusion coefficients and using an iterative process for fusion step to revise the co-efficient weight. For given upper bound of the fusion error variance, the proposed fusion algorithm which combines with the idea of particle swarm optimization can give the sensor precision requirements of each node for the distributed system. In the engineering practice, it can provide a theoretical basis for the selection of sensors. Finally, a real radar system example is provided to verify the effectiveness of the proposed algorithm and an application example is given for the sensor selection of distributed network.
-
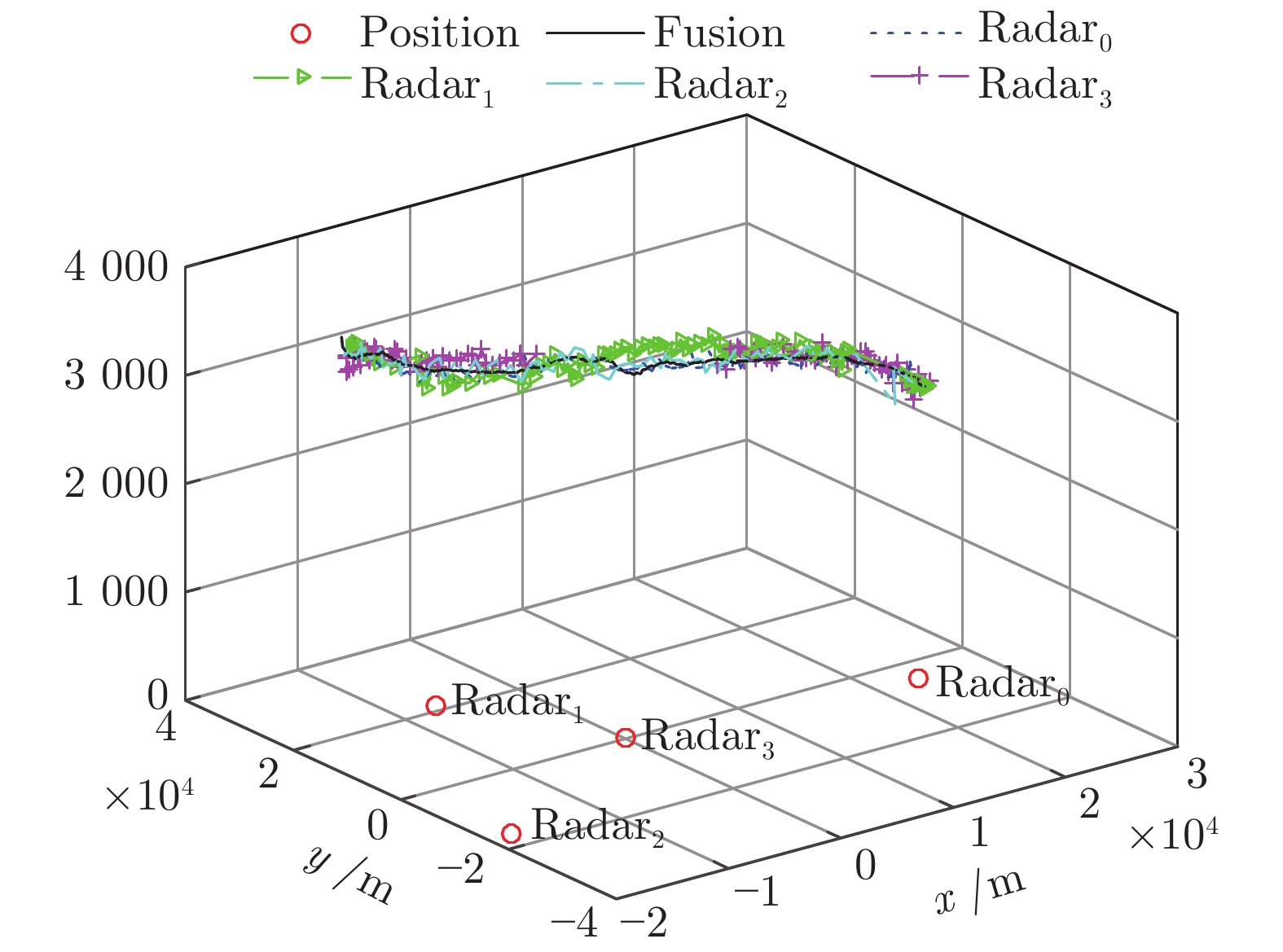
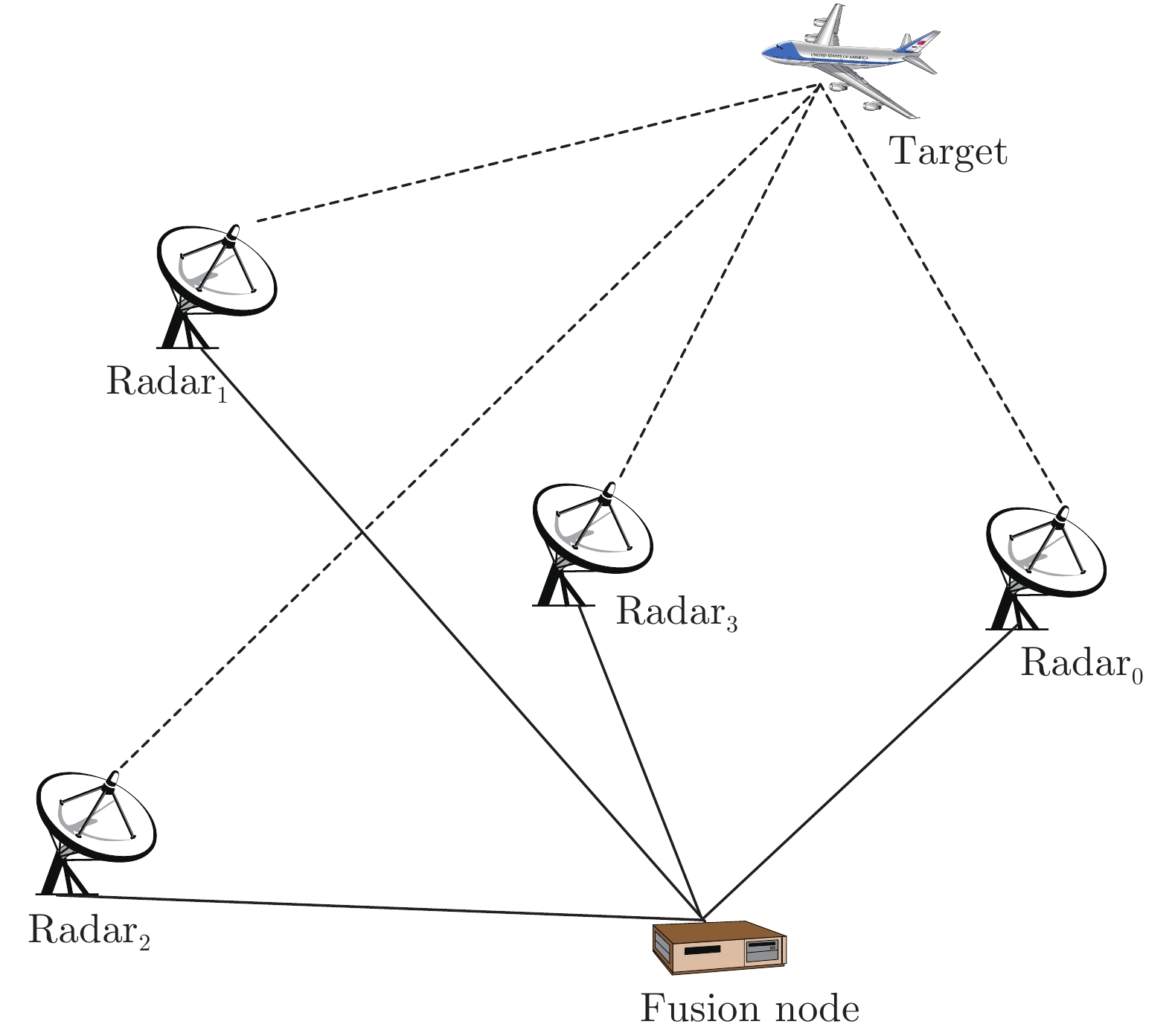
图 2 各雷达跟踪轨迹及SFCI融合轨迹
Fig. 2 Four radar tracking trajectories and SFCI fusion trajectory
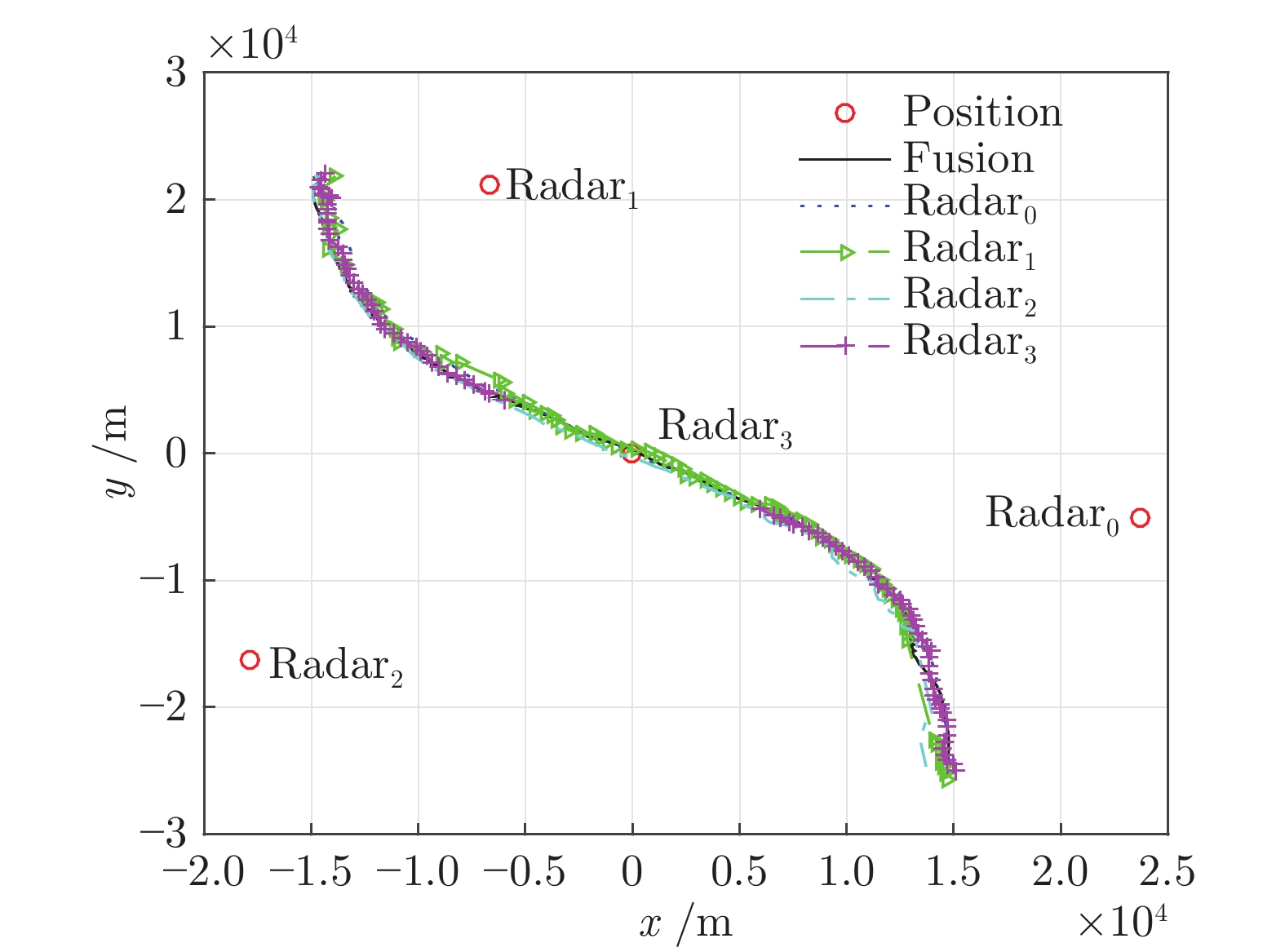
图 3 各雷达跟踪轨迹及SFCI融合轨迹水平投影
Fig. 3 The horizontal projection of four radar tracking trajectories and SFCI fusion trajectory

图 4 各雷达独立估计值及SFCI融合值距离分量误差
Fig. 4 The errors of each radar estimate value and SFCI fusion value
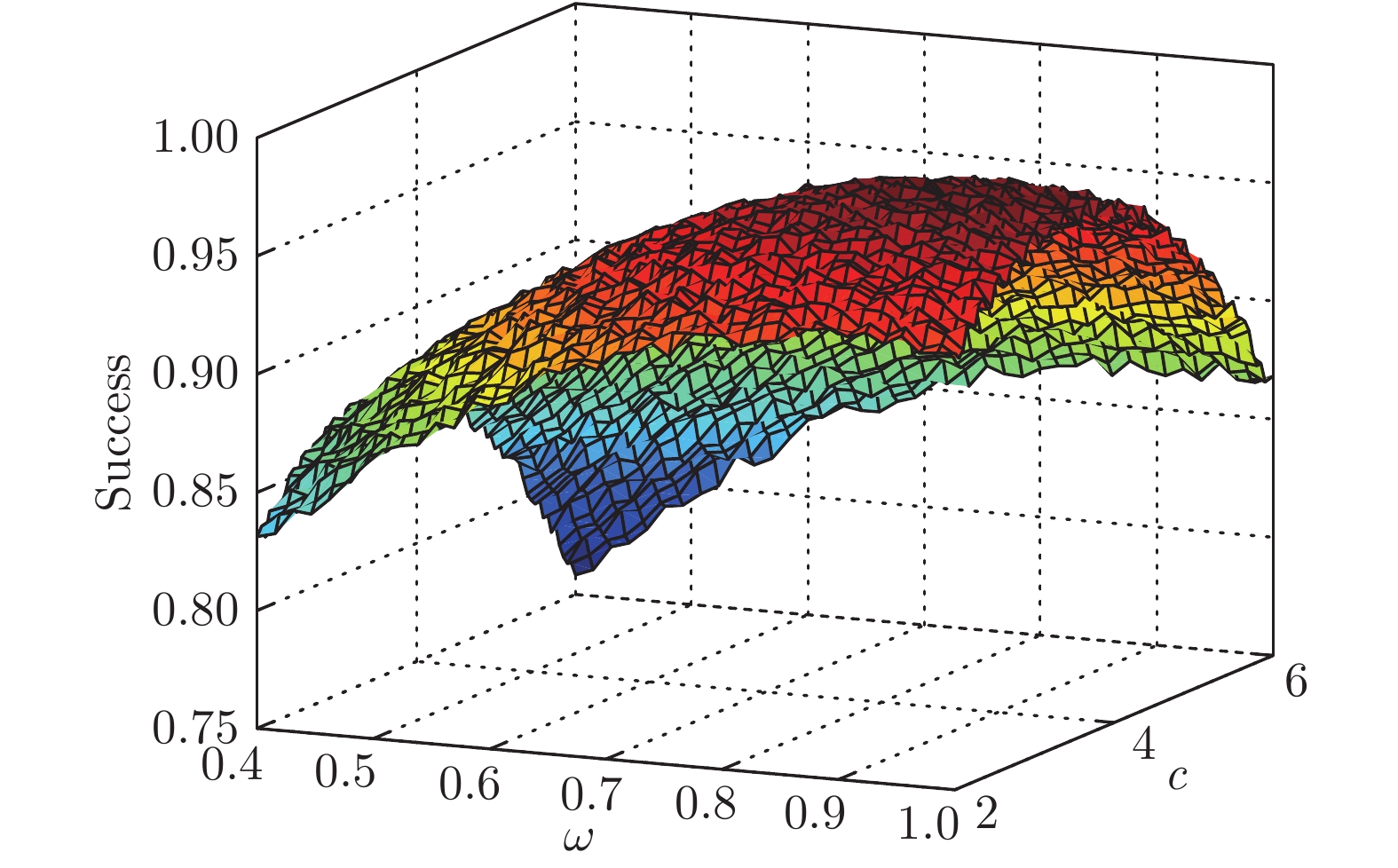
图 5 粒子群优化参数
$\omega$ 、$c_1+c_2$ 与优化成功率Fig. 5 The relationship of
$\omega$ 、$c_1+c_2$ and optimization success rate
图 6 系统中各子节点估计值的
$\rm MSE$ 与快速协方差交叉融合值的$\rm MSE$ Fig. 6 The MSE of each local node estimation and fast covariance intersection fusion estimation
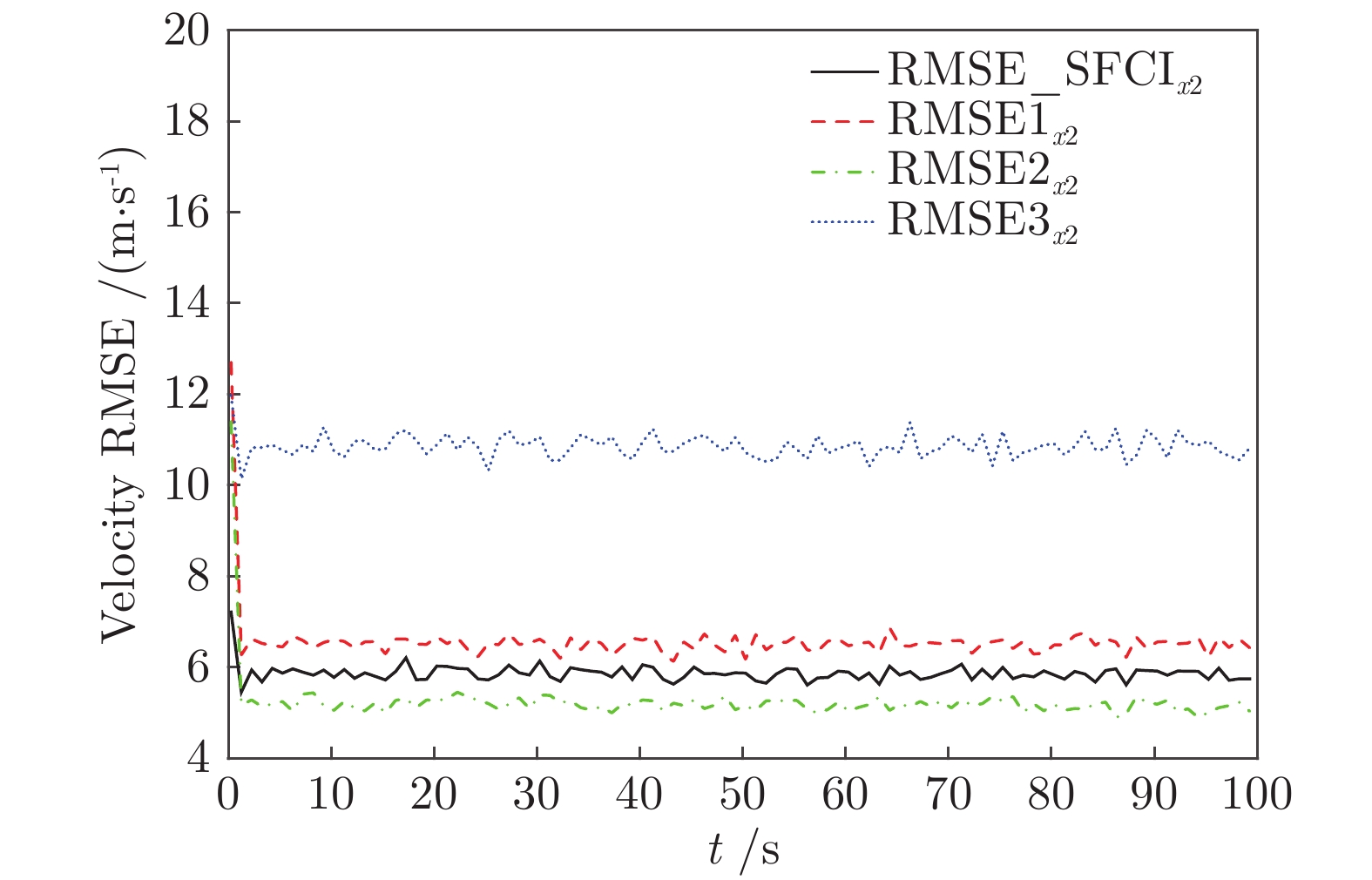
图 8 系统中各子节点估计值速度分量的
$\rm RMSE$ 与快速协方差交叉融合值速度分量的$\rm RMSE$ Fig. 8 The velocity RMSE of each local node estimation and fast covariance intersection fusion estimation
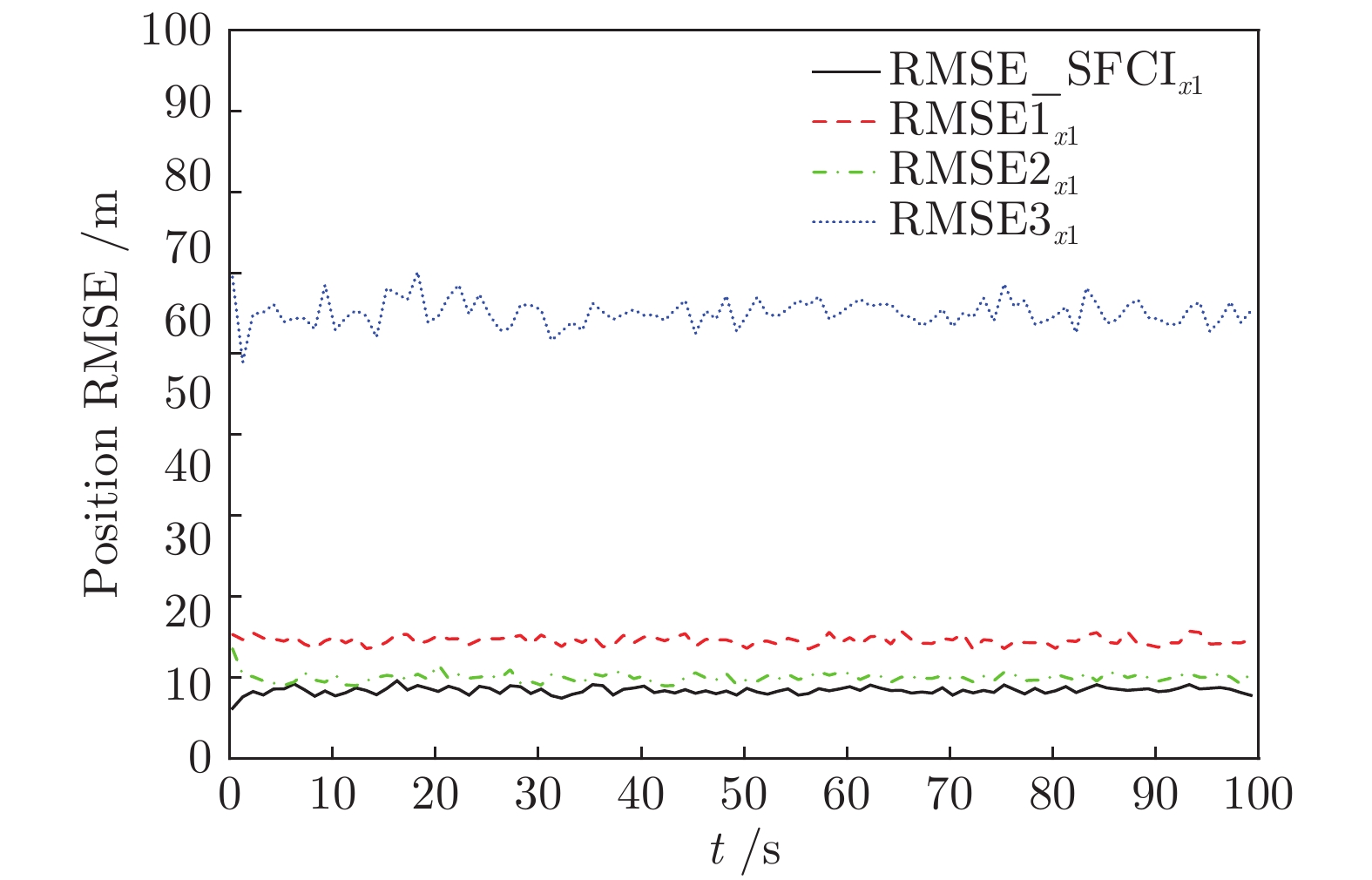
图 7 系统中各子节点估计值位置分量的
$\rm RMSE$ 与快速协方差交叉融合值位置分量的$\rm RMSE$ Fig. 7 The position RMSE of each local node estimation and fast covariance intersection fusion estimation
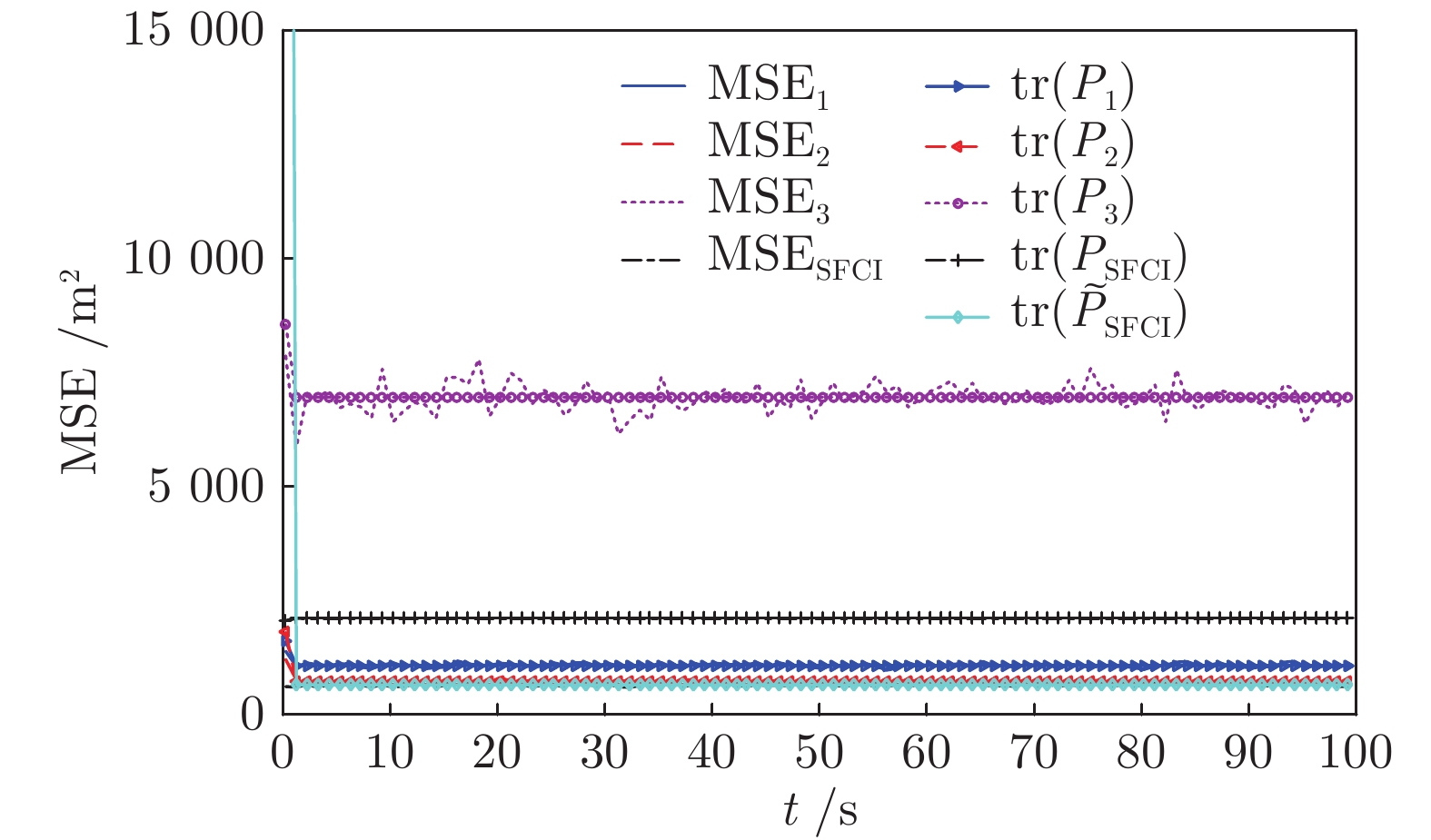
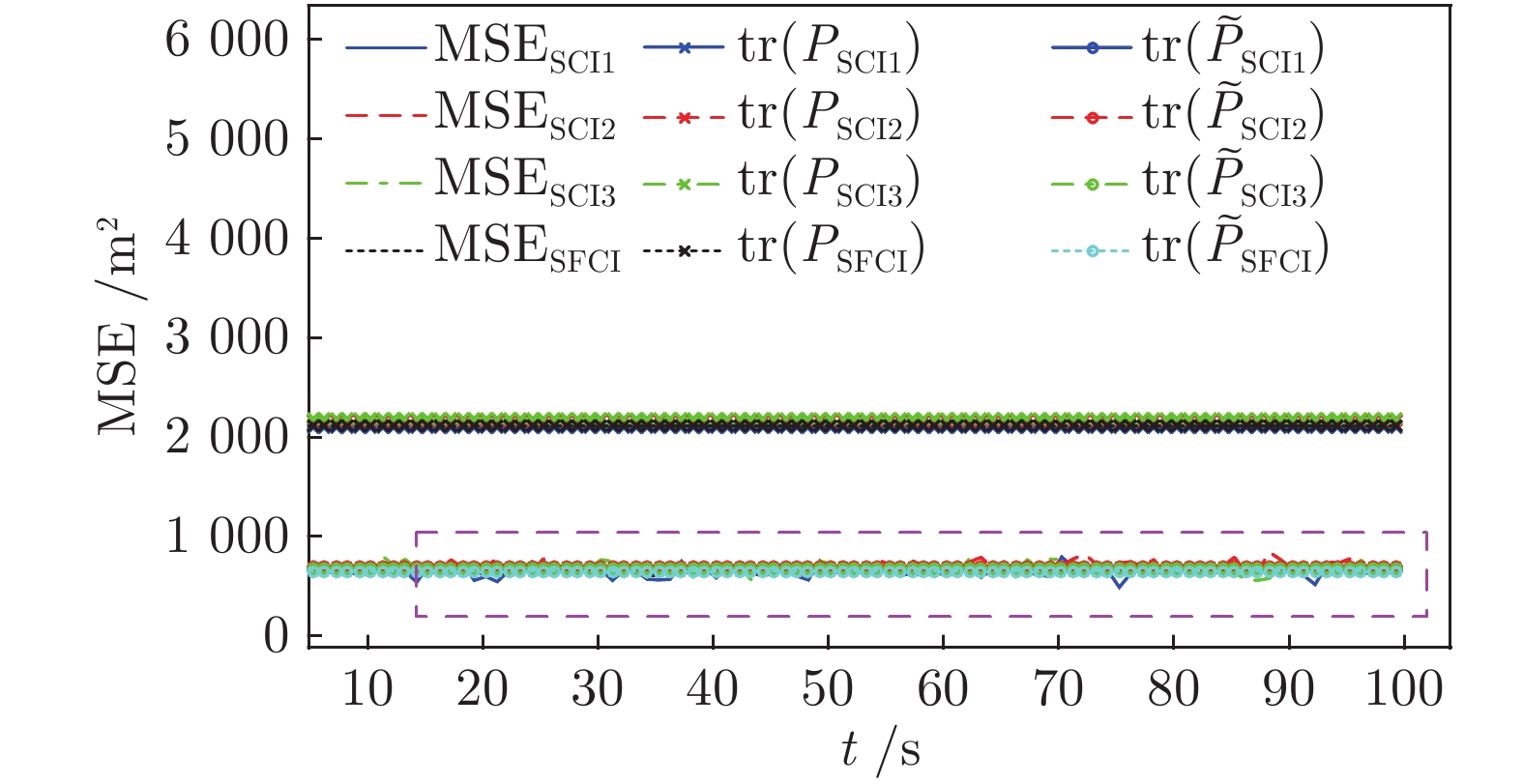
图 9 系统中各子节点估计方差的迹与快速协方差交叉融合方差的迹
Fig. 9 The trace of each local node estimation variance and fast covariance intersection fusion estimation variance
批处理计算复杂度 序贯处理计算复杂度 本文算法 ${\rm O}\left(n^3N\right)$ ${\rm O}\left(n^3N\right)$ 文献[18]算法 ${\rm O}\left(n^{3.5}{\rm{lg} }\left(\dfrac{n}{\varepsilon}\right)N^{2}\right)$ ${\rm O}\left(n^{3.5}{\rm{lg} }\left(\dfrac{n}{\varepsilon}\right)N\right)$  下载: 导出CSV
下载: 导出CSV
表 2 各节点平均单次融合耗时
Table 2 Comparison of mean elapsed time in one period
节点 1 节点 2 节点 3 SCI 平均耗时 (ms) 91.20 89.51 89.96 SFCI 平均耗时 (ms) 0.61 0.59 0.63
下载: 导出CSV
-
[1] Ren W, Beard R W. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5): 655−661 doi: 10.1109/TAC.2005.846556 [2] Stankovic S S, Stankovic M S, Stipanovic D M. Consensus based overlapping decentralized estimator. IEEE Transactions on Automatic Control, 2009, 54(2): 410−415 doi: 10.1109/TAC.2008.2009583 [3] 赵国荣, 韩旭, 卢建华. 一种基于数据驱动传输策略的带宽受限的分布式融合估计器. 自动化学报, 2015, 41(9): 1649−1658Zhao Guo-Rong, Han Xu, LU Jian-Hua. A decentralized fusion estimator using data-driven communication strategy subject to bandwidth constraints. Acta Automatica Sinica, 2015, 41(9): 1649−1658 [4] 张勇刚, 王程程, 魏野, 李宁, 周卫东. 一种空间分布式变阶数自适应网络滤波算法. 自动化学报, 2014, 40(7): 1355−1365Zhang Yong-Gang, Wang Cheng-Cheng, Wei Ye, Li Ning, Zhou Wei-Dong. A spatially distributed variable taplength strategy over adaptive networks. Acta Automatica Sinica, 2014, 40(7): 1355−1365 [5] Cavalcante R L G, Mulgrew B. Adaptive filter algorithms for accelerated discrete-time consensus. IEEE Transactions on Signal Processing, 2010, 58(3): 1049−1058 doi: 10.1109/TSP.2009.2032450 [6] Liu W F, Tao D C, Cheng J, Tang Y. Multiview Hessian discriminative sparse coding for image annotation. Computer Vision & Image Understanding, 2014, 118: 50−60 [7] Wang Y, Li, X R. A fast and fault-tolerant convex combination fusion algorithm under unknown cross-correlation. In: Proceeding of the 12th International Conference on Information Fusion. Seattle, USA: IEEE, 2009. 571–578 [8] Xu C, Tao D C, Xu C. Multi-view intact space learning. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(12): 2531−2544 doi: 10.1109/TPAMI.2015.2417578 [9] Deng Z L, Gao Y, Li C B. Self-tuning decoupled information fusion Wiener state component filters and their convergence. Automatica, 2008, 44: 685−695 doi: 10.1016/j.automatica.2007.07.008 [10] Ran C J, Tao G L, Liu J F. Self-tuning decoupled fusion Kalman predictor and its convergence analysis. IEEE Sensors Journal, 2009, 9: 2024−2032 doi: 10.1109/JSEN.2009.2033260 [11] Cong J L, Li Y Y, Qi G Q, et al. An Order Insensitive Sequential Fast Covariance Intersection Fusion Algorithm. Information Sciences, 2016, 367: 28−40 [12] Julier S J, Uhlman J K. Non-divergent estimation algorithm in the presence of unknown correlations, In: Proceedings of the 1997 IEEE American Control Conference. Albuquerque, USA: IEEE, 1997. 2369–2373 [13] Julier S J, Uhlman J K. Handbook of multisensor data fusion. Boca Raton: CRC Press, 2009. 196–283 [14] Chen L J, Arambel P O, Mehra R K. Estimation under unknown correlation: covariance intersection revisited. IEEE Transactions on Automatic Control, 2002, 47: 1879−1882 doi: 10.1109/TAC.2002.804475 [15] Reinhardt M, Noack B, Arambel P O, Hanebeck U D. Minimum Covariance Bounds for the Fusion under Unknown Correlations. IEEE Signal Processing Letters, 2015, 22(9): 1210−1214 doi: 10.1109/LSP.2015.2390417 [16] Niehsen W, Gmbh R B. Information fusion based on fast covariance intersection filtering. In: Proceedings of the 5th International Conference on Information Fusion, Annapolis, USA: IEEE, 2002. 901–904 [17] Franken D, Hupper A. Improved fast covariance intersection for distributed data fusion. In: Proceedings of the 8th International Conference on Information Fusion, Philadelphia, USA: IEEE, 2005. 1–7 [18] Deng Z L, Zhang P, Qi W J, Gao Y. Sequential covariance intersection fusion Kalman filter. Information Sciences, 2012, 189: 293−309 doi: 10.1016/j.ins.2011.11.038 [19] Tan H L, Shen B, Liu Y R, Alsaedi A, Ahmad B. Eventtriggered multi-rate fusion estimation for uncertain system with stochastic nonlinearities and colored measurement noises. Information Fusion, 2017, 36: 313−320 doi: 10.1016/j.inffus.2016.12.003 [20] Wang X M, Liu W Q, Deng Z L. Robust weighted fusion Kalman estimators for multi-model multisensor systems with uncertain-variance multiplicative and linearly correlated additive white noises. Signal Processing, 2017, 137: 339−355 doi: 10.1016/j.sigpro.2017.02.015 [21] Wang G Q, Li N, Zhang Y G. Diffusion distributed Kalman filter over sensor networks without exchanging raw measurements. Signal Processing, 2017, 132: 1−7 doi: 10.1016/j.sigpro.2016.07.033 [22] Wang Y, Li X R. Distributed estimation fusion with unavailable cross-correlation. IEEE Transition on Aerospace Electronic Systems, 2012, 48(1): 259−278 doi: 10.1109/TAES.2012.6129634 [23] 盛安冬, 王远钢. 满意率波在航迹辨识中的应用. 自动化学报, 2002, 28(4): 559−564Sheng An-Dong, Wang Yuan-Gang. Application of satisfactory filtering to tracking-identification problem. Acta Automatica Sinica, 2002, 28(4): 559−564 -

 下载:
下载:

















计量
- 文章访问数: 2520
- HTML全文浏览量: 636
- PDF下载量: 250
- 被引次数: 0
