

Group Consensus for Networked Euler-Lagrangian Systems Under a Directed Graph Without Relative Velocity Information
-
摘要: 在非对称有向图中,研究网络Euler-Lagrange系统的群一致性问题.每组内的智能体均为合作关系,而组间智能体则可以为合作关系或竞争关系.为了实现群一致性,假设组与组之间是无环连接的且系统有向图满足入度平衡条件.考虑到智能体间相对速度信息难以精确测量的实际情形,设计无需相对速度信息的分布式自适应控制算法,实现网络Euler-Lagrange系统的群一致性.最后通过仿真分析验证所设计算法的有效性.
-
关键词:
- 多智能体系统 /
- Euler-Lagrange系统 /
- 群一致性 /
- 自适应控制
Abstract: In this paper, we study group consensus for networked Euler-Lagrangian systems under a general nonsymmetric directed graph. The relationships between interactive agents in same group are cooperative while the relationships between interactive agents among different groups can be either cooperative or competitive. To achieve group consensus, we assume that the interaction topology among groups is acyclic and the associated directed graph satisfies the in-degree balance condition. Considering the fact that the relative velocity information among neighboring agents is difficult to obtain, we propose a distributed adaptive control algorithm for each agent without relative velocity information to achieve group consensus for networked Euler-Lagrangian systems. Finally, simulation results are presented to demonstrate the effectiveness of the proposed control algorithm.-
Key words:
- Multi-agent systems /
- Euler-Lagrangian systems /
- group consensus /
- adaptive control
1) 本文责任编委 夏元清 -
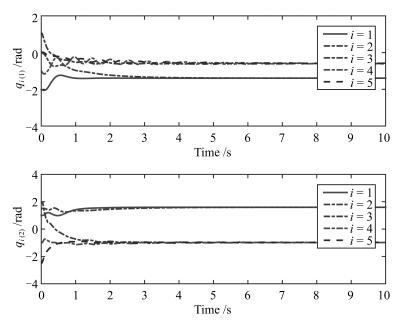
图 2 有向拓扑图下智能体位置状态信息
Fig. 2 The position state of agents under the directed interaction graph
-
[1] Oh K K, Park M C, Ahn H S. A survey of multi-agent formation control. Automatica, 2015, 53:424-440 doi: 10.1016/j.automatica.2014.10.022 [2] Su H S, Wang X F, Lin Z L. Flocking of multi-agents with a virtual leader. IEEE Transactions on Automatic Control, 2009, 54(2):293-307 doi: 10.1109/TAC.2008.2010897 [3] Yu H, Xia X H. Adaptive consensus of multi-agents in networks with jointly connected topologies. Automatica, 2012, 48(8):1783-1790 doi: 10.1016/j.automatica.2012.05.068 [4] Wu W, Zhou W J, Chen T P. Cluster synchronization of linearly coupled complex networks under pinning control. IEEE Transactions on Circuits and Systems I:Regular Papers, 2009, 56(4):829-839 doi: 10.1109/TCSI.2008.2003373 [5] Chen T P, Liu X W, Lu W L. Pinning complex networks by a single controller. IEEE Transactions on Circuits and Systems I:Regular Papers, 2007, 54(6):1317-1326 doi: 10.1109/TCSI.2007.895383 [6] Xu C J, Zheng Y, Su H S, Chen M Z Q, Zhang C F. Cluster consensus for second-order mobile multi-agent systems via distributed adaptive pinning control under directed topology. Nonlinear Dynamics, 2016, 83(4):1975-1985. doi: 10.1007/s11071-015-2459-5 [7] Xia W G, Cao M. Clustering in diffusively coupled networks. Automatica, 2011, 47(11):2395-2405 doi: 10.1016/j.automatica.2011.08.043 [8] Yu J Y, Wang L. Group consensus in multi-agent systems with switching topologies and communication delays. Systems and Control Letters, 2010, 59(6):340-348 doi: 10.1016/j.sysconle.2010.03.009 [9] Qin J H, Yu C B. Cluster consensus control of generic linear multi-agent systems under directed topology with acyclic partition. Automatica, 2013, 49(9):2898-2905 doi: 10.1016/j.automatica.2013.06.017 [10] Wen G G, Huang J, Wang C Y, Chen Z, Peng Z X. Group consensus control for heterogeneous multi-agent systems with fixed and switching topologies. International Journal of Control, 2016, 89(2):259-269 doi: 10.1080/00207179.2015.1072876 [11] 闵海波, 刘源, 王仕成, 孙富春.多个体协调控制问题综述.自动化学报, 2012, 38(10):1557-1570 http://www.aas.net.cn/CN/abstract/abstract17765.shtmlMin Hai-Bo, Liu Yuan, Wang Shi-Cheng, Sun Fu-Chun. An overview on coordination control problem of multi-agent system. Acta Automatica Sinica, 2012, 3810:1557-1570 http://www.aas.net.cn/CN/abstract/abstract17765.shtml [12] Cheng L, Hou Z G, Tan M. Decentralized adaptive consensus control for multi-manipulator system with uncertain dynamics. In:Proceedings of the 2008 IEEE International Conference on Systems, Man, and Cybernetics. Singapore:IEEE, 2008. 2712-2717 [13] Ren W. Distributed leaderless consensus algorithms for networked Euler-Lagrange systems. International Journal of Control, 2009, 82(11):2137-2149 doi: 10.1080/00207170902948027 [14] 梅杰, 张海博, 马广富.有向图中网络Euler-Lagrange系统的自适应协调跟踪.自动化学报, 2011, 37(5):596-603 http://www.aas.net.cn/CN/abstract/abstract17395.shtmlMei Jie, Zhang Hai-Bo, Ma Guang-Fu. Adaptive coordinated tracking for networked Euler-Lagrange systems under a directed graph. Acta Automatica Sinica, 2011, 375:596-603 http://www.aas.net.cn/CN/abstract/abstract17395.shtml [15] Mei J, Ren W, Ma G F. Distributed coordinated tracking with a dynamic leader for multiple Euler-Lagrange systems. IEEE Transactions on Automatic Control, 2011, 56(6):1415-1421 doi: 10.1109/TAC.2011.2109437 [16] Meng Z Y, Ren W, You Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica, 2010, 46(12):2092-2099 doi: 10.1016/j.automatica.2010.09.005 [17] Mei J, Ren W, Ma G F. Distributed containment control for Lagrangian networks with parametric uncertainties under a directed graph. Automatica, 2012, 48(4):653-659 doi: 10.1016/j.automatica.2012.01.020 [18] Hu H X, Zhang Z, Yu L, Yu W W, Xie G M. Group consensus for multiple networked Euler-Lagrange systems with parametric uncertainties. Journal of Systems Science and Complexity, 2014, 27(4):632-649 doi: 10.1007/s11424-014-2149-2 [19] Liu J, Xiang L, Zhao L Y, Zhou J. Group consensus in uncertain networked Euler-Lagrange systems with acyclic interaction topology. In:Proceedings of the 34th Chinese Control Conference. Hangzhou, China:IEEE, 2015. 835-840 [20] Liu J, Ji J C, Zhou J, Xiang L, Zhao L Y. Adaptive group consensus in uncertain networked Euler-Lagrange systems under directed topology. Nonlinear Dynamics, 2015, 82(3):1145-1157 doi: 10.1007/s11071-015-2222-y [21] Mei J, Ren W, Chen J, Ma G F. Distributed adaptive coordination for multiple Lagrangian systems under a directed graph without using neighbors' velocity information. Automatica, 2013, 49(6):1723-1731 doi: 10.1016/j.automatica.2013.02.058 [22] Mei J, Ren W, Chen J. Distributed consensus of second-order multi-agent systems with heterogeneous unknown inertias and control gains under a directed graph. IEEE Transactions on Automatic Control, 2016, 61(8):2019-2034 doi: 10.1109/TAC.2015.2480336 [23] Spong M W, Hutchinson S, Vidyasagar M. Robot Modeling and Control. New Jersey, USA:John Wiley and Sons, 2006. [24] Mesbahi M, Egerstedt M. Graph Theoretic Methods in Multiagent Networks. New Jersey, USA:Princeton University Press, 2010. [25] Ren W, Beard R W. Distributed Consensus in Multi-Vehicle Cooperative Control. London, Britain:Springer-Verlag, 2008. [26] Yu W W, Chen G R, Gao M, Kurths J. Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2010, 40(3):881-891 doi: 10.1109/TSMCB.2009.2031624 [27] Scardovi L, Arcak M, Sontag E D. Synchronization of interconnected systems with applications to biochemical networks:an input-output approach. IEEE Transactions on Automatic Control, 2010, 55(6):1367-1379 doi: 10.1109/TAC.2010.2041974 [28] Mei J. Weighted consensus for multiple Lagrangian systems under a directed graph. In:Proceedings of the 2015 Chinese Automation Congress (CAC). Wuhan, China:IEEE, 2015. 1064-1068 [29] Horn R A, Johnson C R. Matrix Analysis. New York, USA:Cambridge University Press, 1985. [30] Kelly R, Sáñtibanez V, Loría A. Control of Robot Manipulators in Joint Space. London, Britain:Springer, 2005. -

 下载:
下载:

图(3)
计量
- 文章访问数: 2917
- HTML全文浏览量: 331
- PDF下载量: 670
- 被引次数: 0
