

-
摘要: 针对非线性不确定惯性串联系统的控制问题,提出了惯性串联型扩张状态观测器(Extended state observer,ESO),使其可直接对惯性串联系统的扩张状态进行估计,同时把被控对象的极点配置到期望位置,在此基础上提出了适合惯性串联系统的自抗扰控制(Active disturbance rejection control,ADRC)方法,该惯性串联型ADRC方法可以充分利用被控对象的已有知识.论文还给出了惯性串联型ADRC和基于扰动观测器(Disturbance observer,DOB)的控制方法之间的联系,指出它们具有相同的三自由度(three-degree of freedom control,3-DOF)控制系统结构和模块功能,都能实现对系统期望模型以外的总扰动进行估计和补偿.仿真结果表明,所提出的方法是有效的,惯性串联型ESO能实现系统总扰动的估计,惯性串联型ADRC能使系统输出能很好地跟踪系统参考输入.Abstract: For the control problem of nonlinear cascade inertia systems with uncertainties, an extended state observer (ESO) for cascade inertia systems is presented, which can directly estimate the extended state of the cascade inertia system and also arrange the poles of the controlled plant to the desired places. Based on this ESO, an active disturbance rejection control (ADRC) for cascade inertia systems is presented to take full advantage of the known knowledge of the controlled plant. This paper also gives the relationship of both ADRC for cascade inertia system and disturbance observer (DOB)-based control. The two control methods share the same control system architecture and modular functions of three-degree of freedom (3-DOF) and both can estimate and compensate the total disturbance excluding desired model. Simulation results verify the effectiveness of the proposed methods. ESO for cascade inertia systems can estimate the system's total disturbance and ADRC for cascade inertia systems can realize good performance of system output tracking the reference input.1) 本文责任编委 季海波
-
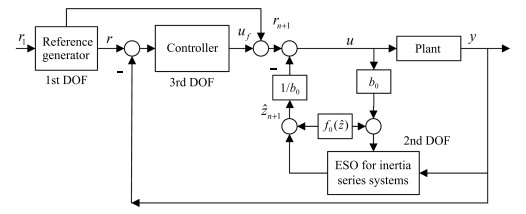
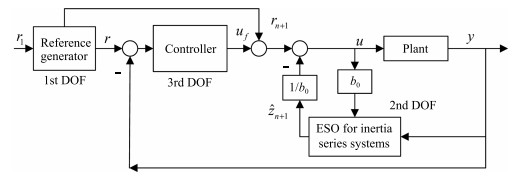
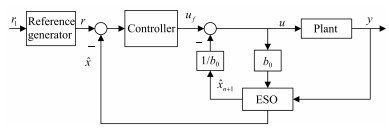
图 4 部分模型已知的惯性串联型自抗扰控制结构
Fig. 4 ADRC topology for inertia series systems with partially known model
-
[1] 韩京清.自抗扰控制器及其应用.控制与决策, 1998, 13(1):19-23 http://www.cqvip.com/Main/Detail.aspx?id=2897440Han Jing-Qing. Auto-disturbances-rejection controller and it's applications. Control and Decision, 1998, 13(1):19-23 http://www.cqvip.com/Main/Detail.aspx?id=2897440 [2] Han J Q. From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 2009, 56(3):900-906 doi: 10.1109/TIE.2008.2011621 [3] Gao Z Q. Active disturbance rejection control:a paradigm shift in feedback control system design. In:Proceedings of the 2006 American Control Conference. Minneapolis, MN, USA:IEEE, 2006. 2399-2405 [4] Huang Y, Xue W C. Active disturbance rejection control:methodology and theoretical analysis. ISA Transactions, 2014, 53(4):963-976 doi: 10.1016/j.isatra.2014.03.003 [5] Gao Z Q. Active disturbance rejection control:from an enduring idea to an emerging technology. In:Proceedings of the 10th International Workshop on Robot Motion and Control. Poznan, Poland:IEEE, 2006. 269-282 [6] Gao Z Q. Scaling and bandwidth-parameterization based controller tuning. In:Proceedings of the 2003 American Control Conference. Denver, USA:IEEE, 2003. 4989-4996 [7] Zhao Z L, Guo B Z. Extended state observer for uncertain lower triangular nonlinear systems. Systems and Control Letters, 2015, 85:100-108 doi: 10.1016/j.sysconle.2015.09.004 [8] Guo B Z, Zhao Z L. On convergence of the nonlinear active disturbance rejection control for MIMO systems. SIAM Journal on Control and Optimization, 2013, 51(2):1727-1757 doi: 10.1137/110856824 [9] 武雷, 保宏, 杜敬利, 王从思.一种自抗扰控制器参数的学习算法.自动化学报, 2014, 40(3):556-560 http://www.aas.net.cn/CN/abstract/abstract18321.shtmlWu Lei, Bao Hong, Du Jing-Li, Wang Cong-Si. A learning algorithm for parameters of automatic disturbances rejection controller. Acta Automatica Sinica, 2014, 40(3):556-560 http://www.aas.net.cn/CN/abstract/abstract18321.shtml [10] Zheng Q, Gao L Q, Gao Z Q. On validation of extended state observer through analysis and experimentation. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(2):024505 doi: 10.1115/1.4005364 [11] Guo B Z, Zhao Z L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Systems and Control Letters, 2011, 60(6):420-430 doi: 10.1016/j.sysconle.2011.03.008 [12] Yang X X, Huang Y. Capabilities of extended state observer for estimating uncertainties. In:Proceedings of the 2009 American Control Conference. St. Louis, MO, USA:IEEE, 2009. 3700-3705 [13] Zhou W K, Shao S, Gao Z Q. A stability study of the active disturbance rejection control problem by a singular perturbation approach. Applied Mathematical Sciences, 2009, 3(10):491-508 [14] Xue W C, Huang Y. On frequency-domain analysis of ADRC for uncertain system. In:Proceedings of the 2013 American Control Conference. Washington, DC, USA:IEEE, 2013. 6637-6642 [15] 陈增强, 孙明玮, 杨瑞光.线性自抗扰控制器的稳定性研究.自动化学报, 2013, 39(5):574-580 http://www.aas.net.cn/CN/abstract/abstract17868.shtmlChen Zeng-Qiang, Sun Ming-Wei, Yang Rui-Guang. On the stability of linear active disturbance rejection control. Acta Automatica Sinica, 2013, 39(5):574-580 http://www.aas.net.cn/CN/abstract/abstract17868.shtml [16] Guo B Z, Zhao Z L. On convergence of nonlinear active disturbance rejection for SISO systems. In:Proceedings of the 24th Chinese Control and Decision Conference. Taiyuan, China:IEEE, 2012. 3507-3512 [17] 程春华, 胡云安, 吴进华.非仿射纯反馈非线性系统的自抗扰控制.自动化学报, 2014, 40(7):1528-1536 http://www.aas.net.cn/CN/abstract/abstract18423.shtmlCheng Chun-Hua, Hu Yun-An, Wu Jin-Hua. Auto disturbance controller of non-affine nonlinear pure feedback systems. Acta Automatica Sinica, 2014, 40(7):1528-1536 http://www.aas.net.cn/CN/abstract/abstract18423.shtml [18] Guo B Z, Zhao Z L. On convergence of tracking differentiator. International Journal of Control, 2011, 84(4):693-701 doi: 10.1080/00207179.2011.569954 [19] Xue W C, Huang Y, Yang X X. What kinds of system can be used as tracking-differentiator. In:Proceedings of the 29th Chinese Control Conference. Beijing, China:IEEE, 2010. 6113-6120 [20] 李杰, 齐晓慧, 夏元清, 高志强.线性/非线性自抗扰切换控制方法研究.自动化学报, 2016, 42(2):202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtmlLi Jie, Qi Xiao-Hui, Xia Yuan-Qing, Gao Zhi-Qiang. On linear/nonlinear active disturbance rejection switching control. Acta Automatica Sinica, 2016, 42(2):202-212 http://www.aas.net.cn/CN/abstract/abstract18810.shtml [21] Guo B Z, Zhao Z L. On convergence of non-linear extended state observer for multi-input multi-output systems with uncertainty. IET Control Theory and Applications, 2012, 6(15):2375-2386 doi: 10.1049/iet-cta.2012.0123 [22] Schrijver E, van Dijk J. Disturbance observers for rigid mechanical systems:equivalence, stability, and design. Journal of Dynamic Systems, Measurement, and Control, 2002, 124(4):539-548 doi: 10.1115/1.1513570 [23] Shim H, Joo Y J. State space analysis of disturbance observer and a robust stability condition. In:Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA, USA:IEEE, 2007. 2193-2198 [24] Xue W C, Huang Y. Comparison of the DOB based control, a special kind of PID control and ADRC. In:Proceedings of the 2011 American Control Conference. San Francisco, CA, USA:IEEE, 2011. 4373-4379 [25] 于哲, 王璐, 苏剑波.基于干扰观测器的不确定线性多变量系统控制.自动化学报, 2014, 40(11):2643-2649 http://www.aas.net.cn/CN/abstract/abstract18542.shtmlYu Zhe, Wang Lu, Su Jian-Bo. Disturbance observer based control for linear multi-variable systems with uncertainties. Acta Automatica Sinica, 2014, 40(11):2643-2649 http://www.aas.net.cn/CN/abstract/abstract18542.shtml [26] Shim H, Jo N H. An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer. Automatica, 2009, 45(1):296-299 doi: 10.1016/j.automatica.2008.10.009 [27] Cunha J P V S, Costa R R, Lizarralde F, Hsu L. Peaking free variable structure control of uncertain linear systems based on a high-gain observer. Automatica, 2009, 45(5):1156-1164 doi: 10.1016/j.automatica.2008.12.018 [28] Xue W C, Huang Y. On performance analysis of ADRC for nonlinear uncertain systems with unknown dynamics and discontinuous disturbance. In:Proceedings of the 32nd Chinese Control Conference. Xi'an, China:IEEE, 2013. 1102-1107 -

 下载:
下载:



图(8)
计量
- 文章访问数: 2588
- HTML全文浏览量: 337
- PDF下载量: 1024
- 被引次数: 0
