

Recursive Sliding-mode Dynamic Surface Adaptive Control for Ship Trajectory Tracking With Nonlinear Gains
-
摘要: 针对三自由度全驱动船舶存在模型不确定和未知外部环境扰动的情况,设计出一种基于非线性增益递归滑模的船舶轨迹跟踪动态面自适应神经网络控制方法.该方法综合考虑船舶位置和速度误差之间关系设计递归滑模面,引入神经网络对船舶模型不确定部分进行逼近,设计带σ-修正泄露项的自适应律对神经网络逼近误差与外界环境扰动总和的界进行估计,并应用一种非线性增益函数构造动态面控制律,选取李雅普诺夫函数证明了该控制律能够保证轨迹跟踪闭环系统内所有信号的一致最终有界性.最后,基于一艘供给船进行仿真验证,结果表明,船舶轨迹跟踪响应速度快、精度高,所设计控制器对系统模型参数摄动及外界扰动具有较强的鲁棒性.Abstract: The trajectory tracking problem of three degrees of freedom fully actuated ship with model uncertainty and unknown external environmental disturbances is analyzed, and a recursive sliding-mode dynamic surface adaptive robust control method with nonlinear gains for ship trajectory tracking is proposed. The recursive sliding-mode surface which considers the relationship between position and velocity errors is designed. Neural networks are constructed to provide estimation of model uncertainty and feedforward compensation for control amount. The adaptive laws based on leakage terms of σ modification are used to estimate bounds of neural network errors and unknown external environmental disturbances. A new function with nonlinear gains is used to construct the dynamic surface control law. With a new Lyapunov function, all signals in the ship's closed-loop trajectory tracking system can be guaranteed to have the uniformly ultimate boundedness by using the proposed control law. Simulation results show that the tracking speed is fast and the accuracy is high, and the proposed controller is strongly robust to model uncertainty and unknown external environmental disturbances.1) 本文责任编委 郭戈
-
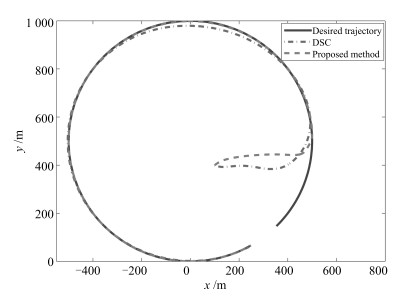
图 2 外部环境扰动下船舶的期望轨迹和实际轨迹
Fig. 2 Desired trajectory and actual trajectory under external environment disturbances
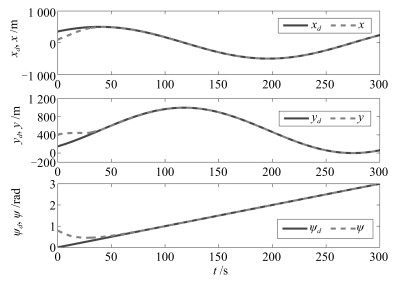
图 3 外部环境扰动下期望轨迹${\pmb \eta}_d=[x_d, y_d, \psi_d]^{\rm T}$和文算法实际轨迹${\pmb \eta}=[x, y, \psi]^{\rm T}$历时曲线
Fig. 3 Curves of desired trajectory ${\pmb \eta}_d=[x_d, y_d, \psi_d]^{\rm T}$ and actual trajectory ${\pmb \eta}=[x, y, \psi]^{\rm T}$ with proposed controller versus time under external environment disturbances
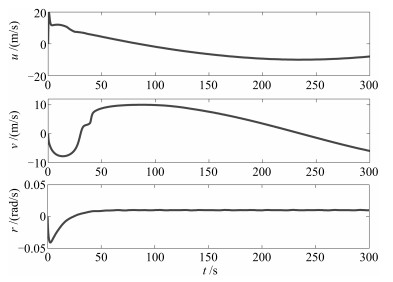
图 4 外部环境扰动下前进速度$u$、横移速度$\nu$和艏摇角速度$r$历时曲线
Fig. 4 Curves of surge velocity $u$, sway velocity $\nu$ and yaw rate $r$ versus time under external environment disturbances
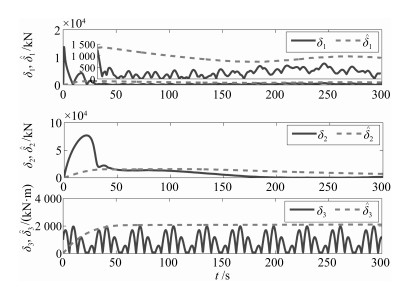
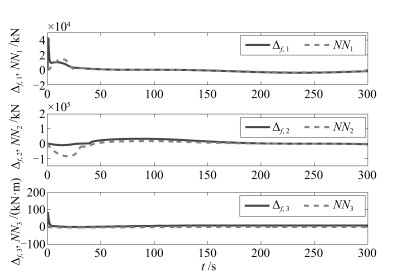
图 7 外部环境扰动和逼近误差的界$\delta_1$, $\delta_2$, $\delta_3$及其估计值$\hat{\delta}_1$, $\hat{\delta}_2$, $\hat{\delta}_3$历时曲线
Fig. 7 Curves of the bounds of external environment disturbances and approximation errors $\delta_1$, $\delta_2$, $\delta_3$ and their estimations $\hat{\delta}_1$, $\hat{\delta}_2$, $\hat{\delta}_3$ verse time with proposed controller
-
[1] Fossen T I, Berge S P. Nonlinear vectorial backstepping design for global exponential tracking of marine vessels in the presence of actuator dynamics. In: Proceedings of the 36th Conference on Decision and Control. San Diego, California, USA: IEEE, 1997, 5: 4237-4242 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=649499 [2] Yang Y, Du J L, Liu H B, Guo C, Abraham A. A trajectory tracking robust controller of surface vessels with disturbance uncertainties. IEEE Transactions on Control Systems Technology, 2014, 22(4):1511-1518 doi: 10.1109/TCST.2013.2281936 [3] 付明玉, 焦建芳, 张爱华.基于虚拟领航者的多艘船舶协调路径跟踪控制.华中科技大学学报(自然科学版), 2013, 41(2):102-108 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201302020Fu Ming-Yu, Jiao Jian-Fang, Zhang Ai-Hua. Coordinated path following control for multiple surface vessels by using virtual-leader. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2013, 41(2):102-108 http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201302020 [4] Swaroop D, Hedrick J K, Yip P P, Gerdes J C. Dynamic surface control for a class of nonlinear systems. IEEE Transactions on Automatic Control, 2000, 45(10):1893-1899 doi: 10.1109/TAC.2000.880994 [5] 杜佳璐, 杨杨, 胡鑫, 陈海泉.基于动态面控制的船舶动力定位控制律设计.交通运输工程学报, 2014, 14(5):36-42, 50 doi: 10.3969/j.issn.1671-1637.2014.05.005Du Jia-Lu, Yang Yang, Hu Xin, Chen Hai-Quan. Control law design of dynamic positioning for ship based on dynamic surface control. Journal of Traffic and Transportation Engineering, 2014, 14(5):36-42, 50 doi: 10.3969/j.issn.1671-1637.2014.05.005 [6] Wang D, Huang J. Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Transactions on Neural Networks, 2005, 16(1):195-202 doi: 10.1109/TNN.2004.839354 [7] Xu B, Zhang Q, Pan Y P. Neural network based dynamic surface control of hypersonic flight dynamics using small-gain theorem. Neurocomputing, 2016, 173:690-699 doi: 10.1016/j.neucom.2015.08.017 [8] 刘希, 孙秀霞, 刘树光, 徐嵩, 郝震.非脆弱递归滑模动态面自适应神经网络控制.控制理论与应用, 2013, 30(10):1323-1328 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201310015Liu Xi, Sun Xiu-Xia, Liu Shu-Guang, Xu Song, Hao Zhen. Non-fragile recursive sliding mode dynamic surface control with adaptive neural network. Control Theory and Applications, 2013, 30(10):1323-1328 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201310015 [9] 贾鹤鸣, 张利军, 程相勤, 边信黔, 严浙平, 周佳加.基于非线性迭代滑模的欠驱动UUV三维航迹跟踪控制.自动化学报, 2012, 38(2):308-314 http://www.aas.net.cn/CN/abstract/abstract17635.shtmlJia He-Ming, Zhang Li-Jun, Cheng Xiang-Qin, Bian Xin-Qian, Yan Zhe-Ping, Zhou Jia-Jia. Three-dimensional path following control for an underactuated UUV based on nonlinear iterative sliding mode. Acta Automatica Sinica, 2012, 38(2):308-314 http://www.aas.net.cn/CN/abstract/abstract17635.shtml [10] 沈智鹏, 姜仲昊, 王国峰, 郭晨.风帆助航船舶运动的模糊自适应迭代滑模控制.哈尔滨工程大学学报, 2016, 37(5):634-639 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201605002Shen Zhi-Peng, Jiang Zhong-Hao, Wang Guo-Feng, Guo Chen. Fuzzy-adaptive iterative sliding-mode control for sail-assisted ship motion. Journal of Harbin Engineering University, 2016, 37(5):634-639 http://d.old.wanfangdata.com.cn/Periodical/hebgcdxxb201605002 [11] Li G Y, Li W, Hildre H P, Zhang H X. Online learning control of surface vessels for fine trajectory tracking. Journal of Marine Science and Technology, 2016, 21(2):251-260 doi: 10.1007/s00773-015-0347-9 [12] 王昊, 王丹, 彭周华, 孙刚.多自主船协同路径跟踪的自适应动态面控制.控制理论与应用, 2013, 30(5):637-643 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305015Wang Hao, Wang Dan, Peng Zhou-Hua, Sun Gang. Adaptive dynamic surface control for cooperative path following of multiple autonomous surface vessels. Control Theory and Applications, 2013, 30(5):637-643 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305015 [13] Wang W, Wang D, Peng Z H, Li T S. Prescribed performance consensus of uncertain nonlinear strict-feedback systems with unknown control directions. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 46(9):1279-1286 doi: 10.1109/TSMC.2015.2486751 [14] 孙秀霞, 刘希, 徐嵩, 蔡鸣, 高杨军, 唐强.无人机航迹角的非线性增益递归滑模控制.系统工程与电子技术, 2015, 37(2):379-384 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs2015020025Sun Xiu-Xia, Liu Xi, Xu Song, Cai Ming, Gao Yang-Jun, Tang Qiang. Nonlinear gains recursive sliding mode control for flight-path angle of UAVs. Systems Engineering and Electronics, 2015, 37(2):379-384 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs2015020025 [15] 刘希, 孙秀霞, 刘树光, 徐嵩, 程志浩.非线性增益递归滑模动态面自适应NN控制.自动化学报, 2014, 40(10):2193-2202 http://www.aas.net.cn/CN/abstract/abstract18494.shtmlLiu Xi, Sun Xiu-Xia, Liu Shu-Guang, Xu Song, Cheng Zhi-Hao. Recursive sliding-mode dynamic surface adaptive NN control with nonlinear gains. Acta Automatica Sinica, 2014, 40(10):2193-2202 http://www.aas.net.cn/CN/abstract/abstract18494.shtml [16] Polycarpou M M, Ioannou P A. A robust adaptive nonlinear control design. Automatica, 1996, 32(3):423-427 doi: 10.1016/0005-1098(95)00147-6 [17] 焦李成, 杨淑媛, 刘芳, 王士刚, 冯志玺.神经网络七十年:回顾与展望.计算机学报, 2016, 39(8):1697-1716 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201608015Jiao Li-Cheng, Yang Shu-Yuan, Liu Fang, Wang Shi-Gang, Feng Zhi-Xi. Seventy years beyond neural networks:retrospect and prospect. Chinese Journal of Computers, 2016, 39(8):1697-1716 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201608015 [18] Fossen T I, Sagatun S I, Sørensen A J. Identification of dynamically positioned ships. Modeling, Identification and Control, 1996, 17(2):153-165 doi: 10.4173/mic.1996.2.7 -

 下载:
下载:

计量
- 文章访问数: 2244
- HTML全文浏览量: 272
- PDF下载量: 806
- 被引次数: 0
