

-
摘要: 针对具有固定通信拓扑的异质相依群体系统的协同一致性追踪问题,从个体性质不同和子群体拓扑结构不同的角度出发,构建异质系统的相依模型.为了通过局部信息实现异质相依群体系统的一致性追踪,设计了一类分布式一致性追踪控制协议.随后,对于固定通信拓扑的情况,给出相应的充分条件确保一致性追踪的实现.定义了相依个体比例参数Pr并且分析了该参数对群体系统协同一致性追踪的影响.最后,通过仿真实例说明理论分析的有效性.Abstract: The consensus tracking problem is investigated for heterogeneous interdependent group systems with fixed communication topologies. Firstly, an interdependent model of the heterogeneous system is built from the perspective of individual characteristic difference and sub-group topology structure difference. A class of distributed consensus tracking control protocols are proposed for realizing consensus tracking of heterogeneous interdependent group systems using local information. Then, for fixed communication topologies, some corresponding sufficient conditions are given to ensure the achievement of consensus tracking. Parameter Pr is defined to denote the proportion of interdependent individuals, whose effect on the consensus tracking of group systems is analyzed. Numerical simulations are provided to illustrate the effectiveness of the theoretical result.
-
Key words:
- Group system /
- interdependent model /
- consensus tracking /
- distributed control
1) 本文责任编委 程龙 -

图 2 异质相依群体系统的固定无向拓扑图
Fig. 2 Fixed undirected topology of the heterogeneous interdependent group system
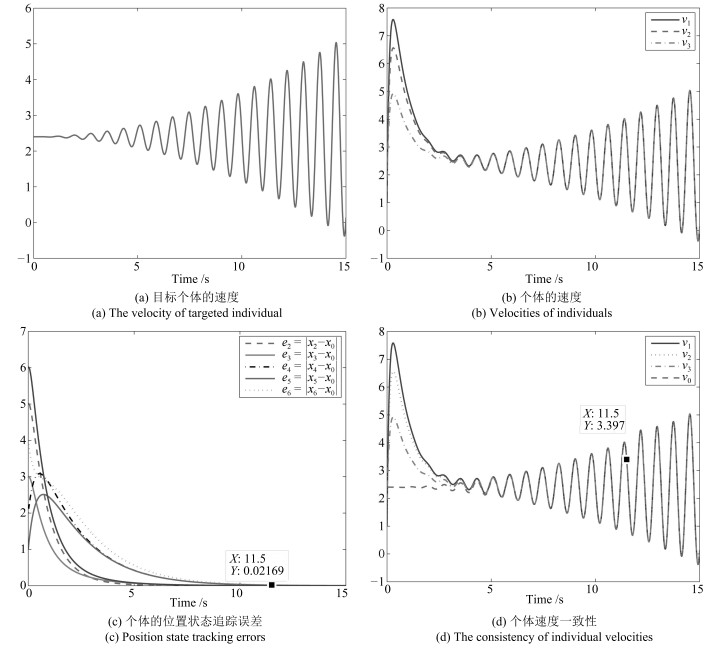
图 3 个体的位置状态追踪误差和速度示意图
Fig. 3 Position state tracking errors and velocities of individuals
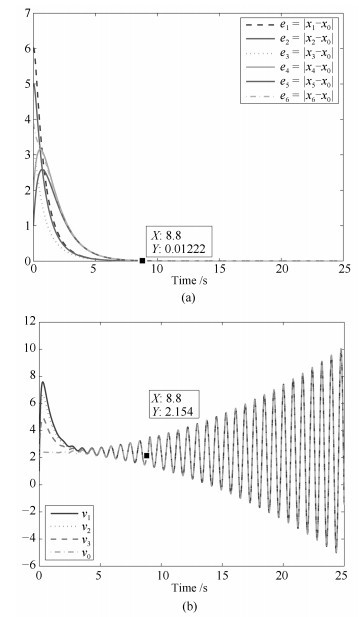
图 4 个体的位置状态追踪误差和速度示意图
Fig. 4 Position state tracking errors and velocities of individuals
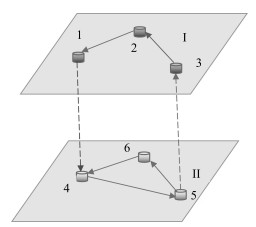
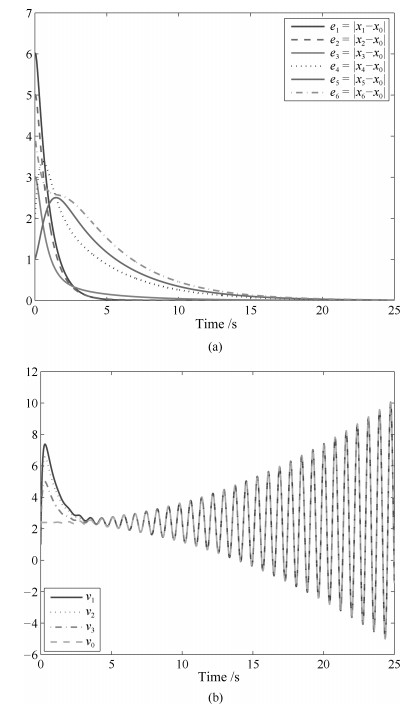
图 5 异质相依群体系统的固定有向拓扑图
Fig. 5 Fixed directed topology of the heterogeneous interdependent group system
-
[1] You K Y, Li Z K, Xie L H. Consensus condition for linear multi-agent systems over randomly switching topologies. Automatica, 2013, 49(10):3125-3132 doi: 10.1016/j.automatica.2013.07.024 [2] Liu Z W, Guan Z H, Shen X M, Fang G. Consensus of multi-agent networks with aperiodic sampled communication via impulsive algorithms using position-only measurements. IEEE Transactions on Automatic Control, 2012, 57(10):2639-2643 doi: 10.1109/TAC.2012.2214451 [3] Pei H Q, Chen S M, Lai Q. A local flocking algorithm of multi-agent dynamic systems. International Journal of Control, 2015, 88(11):2242-2249 doi: 10.1080/00207179.2015.1039595 [4] Xu G H, Guan Z H, He D X, Chi M, Wu Y H. Distributed tracking control of second-order multi-agent systems with sampled data. Journal of the Franklin Institute, 2014, 351(10):4786-4801 doi: 10.1016/j.jfranklin.2014.06.003 [5] Zou L, Wang Z D, Gao H J. Observer-based H∞ control of networked systems with stochastic communication protocol:the finite-horizon case. Automatica, 2016, 63:366-373 doi: 10.1016/j.automatica.2015.10.045 [6] Meng Z Y, Lin Z L, Ren W. Robust cooperative tracking for multiple non-identical second-order nonlinear systems. Automatica, 2013, 49(8):2363-2372 doi: 10.1016/j.automatica.2013.04.040 [7] Wu Y Q, Su H Y, Shi P, Shu Z, Wu Z G. Consensus of multiagent systems using aperiodic sampled-data control. IEEE Transactions on Cybernetics, 2016, 46(9):2132-2143 doi: 10.1109/TCYB.2015.2466115 [8] 周峰, 吴炎烜.基于有向网络的一致性跟踪算法.自动化学报, 2015, 41(1):180-185 http://www.aas.net.cn/CN/abstract/abstract18596.shtmlZhou Feng, Wu Yan-Xuan. Consensus tracking algorithms with directed network. Acta Automatica Sinica, 2015, 41(1):180-185 http://www.aas.net.cn/CN/abstract/abstract18596.shtml [9] 陈世明, 化俞新, 祝振敏, 赖强.邻域交互结构优化的多智能体快速蜂拥控制算法.自动化学报, 2015, 41(12):2092-2099 http://www.aas.net.cn/CN/abstract/abstract18782.shtmlChen Shi-Ming, Hua Yu-Xin, Zhu Zhen-Min, Lai Qiang. Fast flocking algorithm for multi-agent systems by optimizing local interactive topology. Acta Automatica Sinica, 2015, 41(12):2092-2099 http://www.aas.net.cn/CN/abstract/abstract18782.shtml [10] Rahimi R, Abdollahi F, Naqshi K. Time-varying formation control of a collaborative heterogeneous multi agent system. Robotics and Autonomous Systems, 2014, 62(12):1799-1805 doi: 10.1016/j.robot.2014.07.005 [11] Chen J, Zhang X, Xin B, Fang H. Coordination between unmanned aerial and ground vehicles:a taxonomy and optimization perspective. IEEE Transactions on Cybernetics, 2016, 46(4):959-972 doi: 10.1109/TCYB.2015.2418337 [12] Robin C, Lacroix S. Multi-robot target detection and tracking:taxonomy and survey. Autonomous Robots, 2016, 40(4):729-760 doi: 10.1007/s10514-015-9491-7 [13] Zhang H, Feng G, Yan H C, Chen Q J. Observer-based output feedback event-triggered control for consensus of multi-agent systems. IEEE Transactions on Industrial Electronics, 2014, 61(9):4885-4894 doi: 10.1109/TIE.2013.2290757 [14] Johnson G A, Mar D J, Carroll T L, Pecora L M. Synchronization and imposed bifurcations in the presence of large parameter mismatch. Physical Review Letters, 1998, 80(18):3956-3959 doi: 10.1103/PhysRevLett.80.3956 [15] Pei H Q, Chen S M, Lai Q. Multi-target consensus circle pursuit for multi-agent systems via a distributed multi-flocking method. International Journal of Systems Science, 2016, 47(16):3741-3748 doi: 10.1080/00207721.2015.1117687 [16] Li S B, Feng G, Wang J, Luo X Y, Guan X P. Adaptive control for cooperative linear output regulation of heterogeneous multi-agent systems with periodic switching topology. IET Control Theory and Applications, 2015, 9(1):34-41 doi: 10.1049/iet-cta.2014.0315 [17] Ma Q, Xu S Y, Lewis F L, Zhang B Y, Zou Y. Cooperative output regulation of singular heterogeneous multiagent systems. IEEE Transactions on Cybernetics, 2016, 46(6):1471-1475 doi: 10.1109/TCYB.2015.2436971 [18] Zheng Y S, Wang L. A novel group consensus protocol for heterogeneous multi-agent systems. International Journal of Control, 2015, 88(11):2347-2353 doi: 10.1080/00207179.2015.1043581 [19] Liu C L, Liu F. Stationary consensus of heterogeneous multi-agent systems with bounded communication delays. Automatica, 2011, 47(9):2130-2133 doi: 10.1016/j.automatica.2011.06.005 [20] Ma J Y, Zheng Y S, Wang L. LQR-based optimal topology of leader-following consensus. International Journal of Robust and Nonlinear Control, 2015, 25(17):3404-3421 doi: 10.1002/rnc.v25.17 [21] Hu H X, Xuan Q, Yu W W, Zhang C G, Xie G M. Second-order consensus for heterogeneous multi-agent systems in the cooperation-competition network:a hybrid adaptive and pinning control approach. Nonlinear Analysis:Hybrid Systems, 2016, 20:21-36 doi: 10.1016/j.nahs.2015.10.005 [22] Liu K E, Ji Z J, Xie G M, Wang L. Consensus for heterogeneous multi-agent systems under fixed and switching topologies. Journal of the Franklin Institute, 2015, 352(9):3670-3683 doi: 10.1016/j.jfranklin.2015.03.009 [23] Sun J Y, Geng Z Y, Lv Y Z. Adaptive output feedback consensus tracking for heterogeneous multi-agent systems with unknown dynamics under directed graphs. Systems and Control Letters, 2016, 87:16-22 doi: 10.1016/j.sysconle.2015.10.007 [24] Yang Y, Yue D, Dou C X. Distributed adaptive output consensus control of a class of heterogeneous multi-agent systems under switching directed topologies. Information Sciences, 2016, 345:294-312 doi: 10.1016/j.ins.2016.01.043 [25] Wen G G, Huang J, Wang C Y, Chen Z, Peng Z X. Group consensus control for heterogeneous multi-agent systems with fixed and switching topologies. International Journal of Control, 2016, 89(2):259-269 doi: 10.1080/00207179.2015.1072876 [26] Zhou Y J, Yu X H, Sun C Y, Yu W W. Higher order finite-time consensus protocol for heterogeneous multi-agent systems. International Journal of Control, 2015, 88(2):285-294 doi: 10.1080/00207179.2014.950047 [27] Feng Y Z, Xu S Y, Lewis F L, Zhang B Y. Consensus of heterogeneous first-and second-order multi-agent systems with directed communication topologies. International Journal of Robust and Nonlinear Control, 2015, 25(3):362-375 doi: 10.1002/rnc.v25.3 [28] Zhu Y K, Guan X P, Luo X Y. Finite-time consensus of heterogeneous multi-agent systems. Chinese Physics B, 2013, 22(3):Article No. 038901 http://iopscience.iop.org/1674-1056/22/3/038901 [29] Rinaldi S M, Peerenboom J P, Kelly T K. Identifying, understanding, and analyzing critical infrastructure interdependencies. IEEE Control Systems, 2001, 21(6): 11-25 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=969131 [30] Ren W, Beard R W. Distributed Consensus in Multi-Vehicle Cooperative Control:Theory and Applications. London, UK:Springer-Verlag, 2008. -

 下载:
下载:

计量
- 文章访问数: 2626
- HTML全文浏览量: 409
- PDF下载量: 527
- 被引次数: 0
