

Adaptive Robust Anti-interference Control and Vibration Suppression for an Elastic-base Elastic-joint Space Robot
-
摘要: 研究不确定弹性基和弹性关节空间机器人的抗扰运动控制及基座和关节弹性振动同步抑制问题.在对基座和关节弹性进行等效线性弹簧假设的基础上,建立了弹性基和弹性关节空间机器人的动力学方程,并推导了基于等效刚度思想的奇异摄动慢、快变子系统.对传统参数自适应控制律进行σ修正并与鲁棒抗扰控制相结合,对不确定参数和有界外部扰动影响下的慢变子系统提出了基座姿态和臂杆关节刚性运动轨迹跟踪的改进自适应鲁棒抗扰控制方案.使用高增益线性状态观测器对快变高阶量进行实时观测,针对快变子系统设计了基座和关节弹性振动同步抑制的改进最优控制方案.仿真示例分析,表明了所提混合控制方案在空间机器人抗扰运动控制及振动抑制上的有效性.Abstract: Anti-interference motion control and elastic vibration synchronous suppression of base and joints for an elastic-base elastic-joint space robot with uncertainties are studied. On the basis of equivalent linear spring assumptions about the elastic base and joints, the dynamic equations of the space robot are established, then both singular perturbation slow and fast subsystems are deduced with the equivalent stiffness concept. The traditional parameter adaptive control law is improved by using σ modification, and is then combined with the robust anti-interference control. An improved singular perturbation adaptive robust anti-interference control scheme is proposed for the slow subsystem to track the rigid motion trajectories of the base's attitude and links' joints subject to uncertain parameters and bounded external disturbances. A high-gain linear state observer is employed to measure the fast higher-order states in real time, and an improved optimal control method is designed for the fast subsystem to synchronously suppress the elastic vibrations of the base and joints. Simulation result demonstrates the validity of the presented hybrid control scheme in anti-interference motion control and vibration suppression of the space robot.
-
Key words:
- Space robot /
- elastic-base /
- elastic-joint /
- anti-interference control /
- vibration suppression
1) 本文责任编委 孙富春 -

图 2 开启$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况
Fig. 2 Trajectory tracking with $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
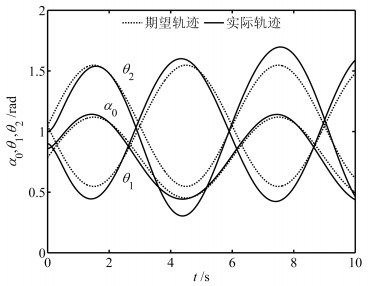
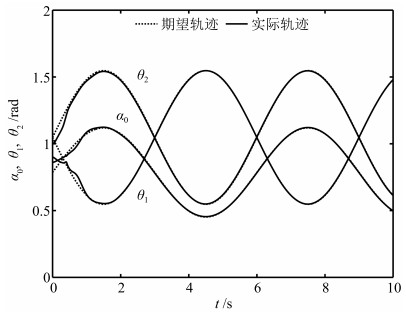
图 3 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的轨迹跟踪情况
Fig. 3 Trajectory tracking without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
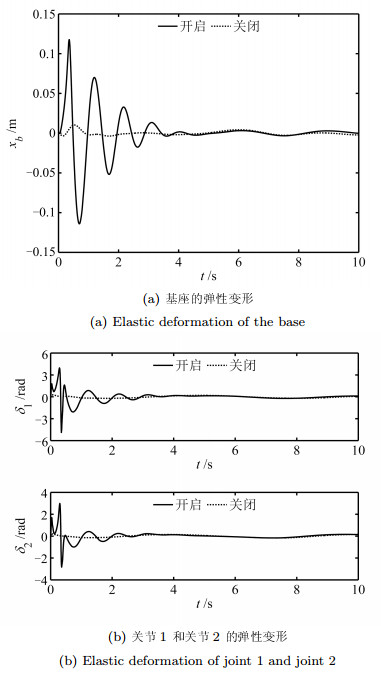
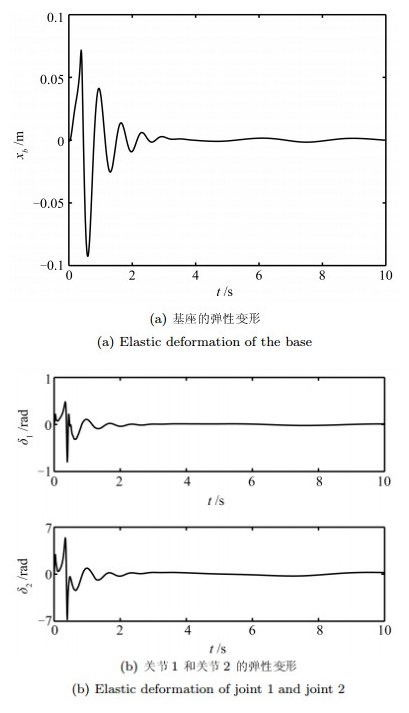
图 4 开启和关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$时的仿真结果
Fig. 4 Simulation results with and without $\dot{\hat{\pmb{\varphi}}}$ and $\pmb{\tau}_{rob}$
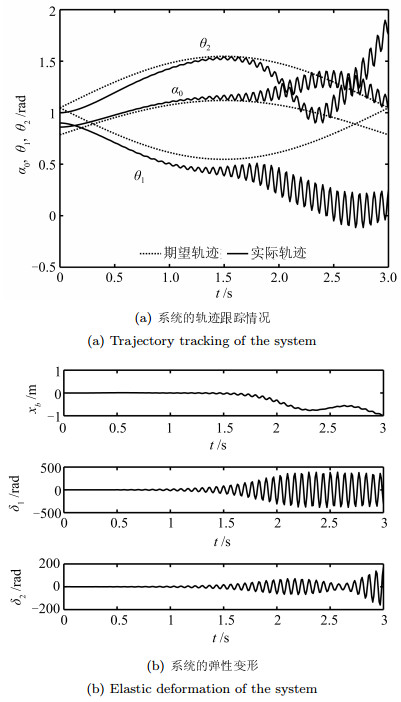
图 5 关闭$\dot{\hat{\pmb{\varphi}}}$和$\pmb{\tau}_{rob}$和$\pmb{\tau}^{f}_{n}$时的仿真结果
Fig. 5 Simulation results without $\dot{\hat{\pmb{\varphi}}}$, $\pmb{\tau}_{rob}$ and $\pmb{\tau}^{f}_{n}$
-
[1] Sukhanov V M, Sliaev A V, Glumov V M. Dynamic equations of free-flying space robot for feedback control tasks. Automation and Remote Control, 2015, 76(8):1446-1454 doi: 10.1134/S0005117915080093 [2] Flores-Abad A A, Ma O, Pham K, Ulrich S. A review of space robotics technologies for on-orbit servicing. Progress in Aerospace Sciences, 2014, 68:1-26 doi: 10.1016/j.paerosci.2014.03.002 [3] Kulakov F M. Remote control of space robots. Journal of Computer and Systems Sciences International, 2016, 55(4):635-682 doi: 10.1134/S1064230716030126 [4] 徐文福, 王学谦, 薛强, 梁斌.保持基座稳定的双臂空间机器人轨迹规划研究.自动化学报, 2013, 39(1):69-80 http://www.aas.net.cn/CN/abstract/abstract17850.shtmlXu Wen-Fu, Wang Xue-Qian, Xue Qiang, Liang Bin. Study on trajectory planning of dual-arm space robot keeping the base stabilized. Acta Automatica Sinica, 2013, 39(1):69-80 http://www.aas.net.cn/CN/abstract/abstract17850.shtml [5] Wang M, Sun L, Yin W, Dong S, Liu J T. Continuous robust control for series elastic actuator with unknown payload parameters and external disturbances. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):620-627 doi: 10.1109/JAS.2017.7510610 [6] Xu B, Yuan Y. Two performance enhanced control of flexible-link manipulator with system uncertainty and disturbances. Science China Information Sciences, 2017, 60(5):Article No.050202 http://cn.bing.com/academic/profile?id=5c3fb590a438738bb47e2ad9660cbcee&encoded=0&v=paper_preview&mkt=zh-cn [7] Zhang L J, Chen L. Adaptive time varying sliding mode control and vibration suppression for space manipulator with fully flexible arms and uncertain parameters. Revista de la Facultad de Ingenierí, 2016, 31(9):232-245 http://cn.bing.com/academic/profile?id=eaa7c42ee1129f1d4c4225bc7205b6c1&encoded=0&v=paper_preview&mkt=zh-cn [8] Nanos K, Papadopoulos E G. On the dynamics and control of flexible joint space manipulators. Control Engineering Practice, 2015, 45:230-243 doi: 10.1016/j.conengprac.2015.06.009 [9] Ulrich S, Sasiadek J Z. Trajectory tracking control of flexible-joint space manipulators. Canadian Aeronautics and Space Journal, 2012, 58(1):47-59 doi: 10.5589/q12-004 [10] Yang Y B, Xu W F, Mu Z G. Dynamic modeling and vibration properties study for flexible-joint space manipulators. In:Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO). Bali, Indonesia:IEEE, 2014. 2443-2448 [11] 陈志勇, 陈力.姿态受控柔性关节双臂空间机器人的抗力矩饱和控制与振动抑制.工程力学, 2016, 33(5):227-233, 256 http://www.cnki.com.cn/Article/CJFDTotal-GCLX201605028.htmChen Zhi-Yong, Chen Li. Anti-torque-windup control and vibration suppression of flexible-joint dual-arm space robot with an attitude-controlled base. Engineering Mechanics, 2016, 33(5):227-233, 256 http://www.cnki.com.cn/Article/CJFDTotal-GCLX201605028.htm [12] Meng D S, Liang B, Xu W F, Wang X Q, Liu H D, Zhu X J. On the autonomous target capturing of flexible-base space robotic system. In:Proceedings of the 13th International Conference on Control Automation Robotics and Vision (ICARCV). Singapore, Singapore:IEEE, 2014. 1894-1899 [13] 元波, 陈力.基座弹性影响下空间机械臂的轨迹跟踪控制及弹性振动主动抑制.力学与实践, 2014, 36(5):598-603 doi: 10.6052/1000-0879-13-530Yuan Bo, Chen Li. Trajectory tracking control and vibration suppression of space-based robot with elastic foundation. Mechanics in Engineering, 2014, 36(5):598-603 doi: 10.6052/1000-0879-13-530 [14] Liang Z Y, Wang C L, Chen H, Li C H. Adaptive dynamic feedback tracking control for a robot-camera system with unknown parameters. Acta Automatica Sinica, 2016, 42(10):1595-1604 http://cn.bing.com/academic/profile?id=d7cbcc8fc863b19a3ac2db5d125bb7cc&encoded=0&v=paper_preview&mkt=zh-cn [15] Mahmoud M S, Nasir M T. Robust control design of wheeled inverted pendulum assistant robot. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):628-638 doi: 10.1109/JAS.2017.7510613 [16] 黄攀峰, 胡永新, 王东科, 孟中杰, 刘正雄.空间绳系机器人目标抓捕鲁棒自适应控制器设计.自动化学报, 2017, 43(4):538-547 http://www.aas.net.cn/CN/abstract/abstract19032.shtmlHuang Pan-Feng, Hu Yong-Xin, Wang Dong-Ke, Meng Zhong-Jie, Liu Zheng-Xiong. Capturing the target for a tethered space robot using robust adaptive controller. Acta Automatica Sinica, 2017, 43(4):538-547 http://www.aas.net.cn/CN/abstract/abstract19032.shtml [17] Spong M W. Modeling and control of elastic joint robots. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4):310-319 doi: 10.1115/1.3143860 [18] Slotine J J E, Li W P. On the adaptive control of robot manipulators. The International Journal of Robotics Research, 1987, 6(3):49-59 doi: 10.1177/027836498700600303 [19] 刘业超, 刘伊威, 刘宏.柔性关节机器人奇异摄动控制.电机与控制学报, 2009, 13(3):436-441 http://mall.cnki.net/magazine/Article/DJKZ200903024.htmLiu Ye-Chao, Liu Yi-Wei, Liu Hong. Singular perturbation control for flexible-joint manipulator. Electric Machines and Control, 2009, 13(3):436-441 http://mall.cnki.net/magazine/Article/DJKZ200903024.htm [20] Zribi M, Ahmad S. Robust adaptive control of multiple robots in cooperative motion using sigma modification. In:Proceedings of the 1991 IEEE International Conference on Robotics and Automation. Sacramento, California, USA:IEEE, 1991, 3:2160-2165 [21] Danesh M, Keshmiri M, Sheikholeslam F. Developing a robot control scheme robust to uncertain model parameters and unmodeled dynamics. In:Proceedings of the 1st IEEE Conference on Industrial Electronics and Applications. Singapore, Singapore:IEEE, 2006. 1-6 [22] Lee J, Ha T J, Yeon J S, Lee S, Park J H. Robust nonlinear observer for flexible joint robot manipulators with only motor position measurement. In:Proceedings of the 2007 International Conference on Control, Automation, and Systems. Seoul, South Korea:IEEE, 2007. 56-61 -

 下载:
下载:

计量
- 文章访问数: 2954
- HTML全文浏览量: 341
- PDF下载量: 645
- 被引次数: 0
