

-
摘要: 针对功能性电刺激(Functional electrical stimulation,FES)下外部干扰和肌肉疲劳对关节运动的影响,提出了一种神经网络自适应滑模控制方法以获得更加精确的关节运动.本文建立了电刺激下的关节运动模型,在此模型的基础上设计了滑模控制律,利用径向基神经网络在线逼近系统不确定特性,并通过Lyapunov方法设计了径向基神经网络的自适应律,以电刺激所产生的膝关节运动控制为例,通过仿真和实验研究验证了该神经网络滑模控制方法相对于传统的滑模控制来说,不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰和肌肉疲劳的影响时,还可自适应地对此进行补偿,有效地调节电刺激强度以获得准确的关节运动.Abstract: This paper presents a neuro sliding mode control method of electrical stimulation for accurate electrically-induced joint movement by compensating the effects of external disturbances and muscle fatigue during stimulation. The sliding mode control law is rested on an electrically-induced musculoskeletal model. The adaptive control law of the radial basis function network which is used to approximate system modeling uncertainties is derived through the Lyapunov function. This proposed method is evaluated by adaptive control of electrical stimulation to achieve expected knee movements, especially in the presence of external disturbances and muscle fatigue. Both simulation and experimental studies indicate that the proposed adaptive control method is effective and feasible to compensate deviations of joint movement resulting from external disturbances and muscle fatigue.1) 本文责任编委 王卫群
-
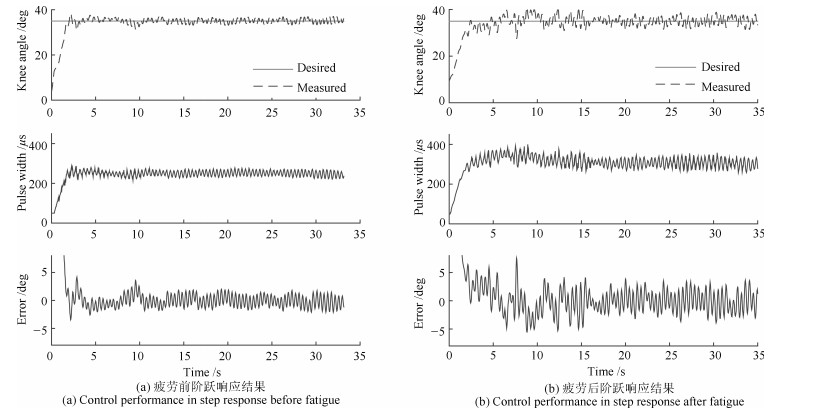
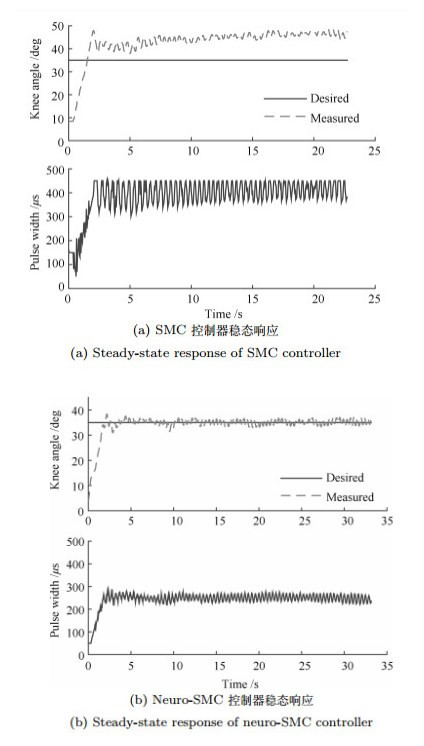
图 10 疲劳实验前后神经滑模控制阶跃响应结果
Fig. 10 Control performance of neuro-SMC in step response in fatigue test
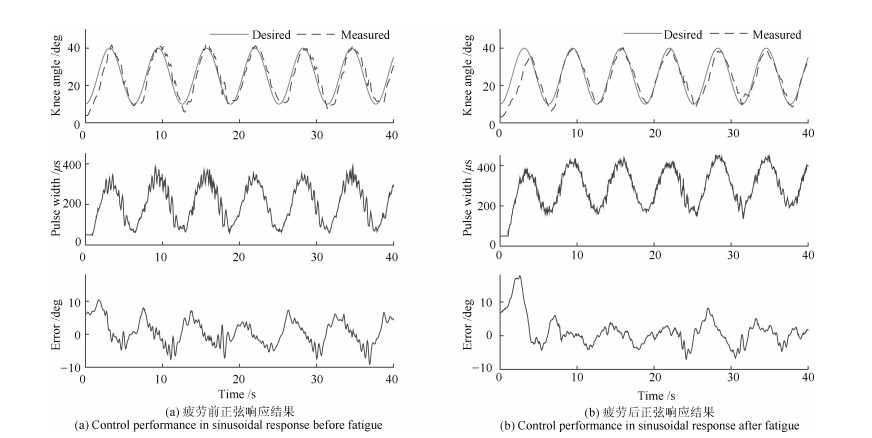
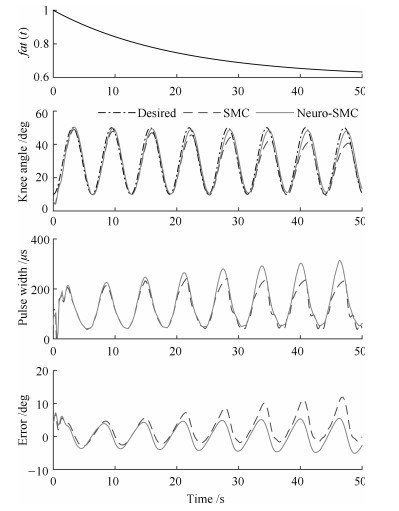
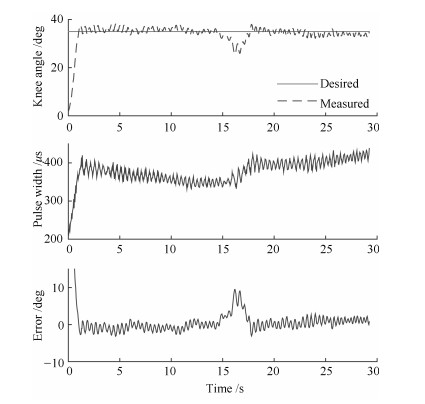
图 11 疲劳实验中neuro-SMC正弦响应结果
Fig. 11 Control performance of neuro-SMC in sinusoidal response in fatigue test
表 1 膝关节模型参数
Table 1 The parameters of knee joint model
参数 受试者 身高 168 cm 体重 54 kg J 0.256 kg · m2 m 2.91 kg l 260.4 mm B 0.19 Nm · s/rad λ 2.47 Nm/rad θ0 0.09 rad ${\hat b}$ 0.02 Nm/μs  下载: 导出CSV
下载: 导出CSV
-
[1] Doucet B M, Lam A, Griffin L. Neuromuscular electrical stimulation for skeletal muscle function. Yale Journal of Biology and Medicine, 2012, 85(2):201-215 http://www.oalib.com/references/14347067 [2] Quandt F, Hummel F C. The influence of functional electrical stimulation on hand motor recovery in stroke patients:a review. Experimental & Translational Stroke Medicine, 2014, 6(1):Article No.9 https://www.ncbi.nlm.nih.gov/pubmed/25276333 [3] Kafri M, Laufer Y. Therapeutic effects of functional electrical stimulation on gait in individuals post-stroke. Annals of Biomedical Engineering, 2015, 43(2):451-466 doi: 10.1007/s10439-014-1148-8 [4] Guiraud D, Coste A C, Benoussaad M, Fattal C. Implanted functional electrical stimulation:case report of a paraplegic patient with complete SCI after 9 years. Journal of Neuroengineering and Rehabilitation, 2014, 11(1):15 doi: 10.1186/1743-0003-11-15 [5] Zhang D G, Guan T H, Widjaja F, Ang W T. Functional electrical stimulation in rehabilitation engineering:a survey. In:Proceedings of the 1st International Convention on Rehabilitation Engineering & Assistive Technology. New York, USA:ACM, 2007. 221-226 [6] Lynch C L, Milos R. Functional electrical stimulation:close-loop control of induced muscle contractions. IEEE Control Systems Magazine, 2008, 28(2):40-50 doi: 10.1109/MCS.2007.914692 [7] Ferrarin M, Palazzo F, Riener R, Quintern J. Model-based control of FES-induced single joint movements. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2001, 9(3):245-257 doi: 10.1109/7333.948452 [8] Kurosawa K, Futami R, Watanabe T, Hoshimiya N. Joint angle control by FES using a feedback error learning controller. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3):359-371 doi: 10.1109/TNSRE.2005.847355 [9] 姚鹏, 张定国, 刘健荣.抑制腕部病理性震颤的功能性电刺激系统的仿真与实验.中国生物医学工程学报, 2014, 33(3):379-384 http://www.cnki.com.cn/Article/CJFDTOTAL-ZSWY201403017.htmYao Peng, Zhang Ding-Guo, Liu Jian-Rong. Suppressing pathological tremor on wrist joint using functional electrical stimulation:simulation and experiment. Chinese Journal of Biomedical Engineering, 2014, 33(3):379-384 http://www.cnki.com.cn/Article/CJFDTOTAL-ZSWY201403017.htm [10] Meadmore K L, Hughes A M, Freeman C T, Cai Z L, Tong D, Burridge J H, Rogers E. Functional electrical stimulation mediated by iterative learning control and 3D robotics reduces motor impairment in chronic stroke. Journal of Neuroengineering and Rehabilitation, 2012, 9(1):Article No.32 doi: 10.1186/1743-0003-9-32 [11] Zhang Q, Hayashibe M, Azevedo-Coste C. Evoked electromyography-based closed-loop torque control in functional electrical stimulation. IEEE Transactions on Biomedical Engineering, 2013, 60(8):2299-2307 doi: 10.1109/TBME.2013.2253777 [12] Ren Y, Zhang D G. FEXO knee:a rehabilitation device for knee joint combining functional electrical stimulation with a compliant exoskeleton. In:Proceedings of the 5th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Sao Paulo, Brazil:IEEE, 2014. 683-688 [13] Brend O, Freeman C, French M. Multiple-model adaptive control of functional electrical stimulation. IEEE Transactions on Control Systems Technology, 2015, 23(5):1901-1913 doi: 10.1109/TCST.2015.2394508 [14] Chen Y X, Hu J, Zhang F, Li P F, Hou Z G. EMG-based estimation of knee joint angle under functional electrical stimulation using an artificial neural network. In:Proceedings of the 32nd Chinese Control Conference. Xi'an, China:IEEE, 2013. 4661-4665 [15] Wang Q, Sharma N, Johnson M, Gregory C M, Dixon W E. Adaptive inverse optimal neuromuscular electrical stimulation. IEEE Transactions on Cybernetics, 2013, 43(6):1710-1718 doi: 10.1109/TSMCB.2012.2228259 [16] Lynch C L, Popovic M R. A comparison of closed-loop control algorithms for regulating electrically stimulated knee movements in individuals with spinal cord injury. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2012, 20(4):539-548 doi: 10.1109/TNSRE.2012.2185065 [17] Qiu S, He F, Tang J B, Xu J P, Zhang L X, Zhao X, Qi X, Zhou P, Cheng X M, Wan B K, Ming D. Intelligent algorithm tuning PID method of function electrical stimulation using knee joint angle. In:Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Chicago, USA:IEEE, 2014. 2561-2564 [18] Jezernik S, Wassink R G, Keller T. Sliding mode closed-loop control of FES:Controlling the shank movement. IEEE Transactions on Biomedical Engineering, 2004, 51(2):263-272 doi: 10.1109/TBME.2003.820393 [19] Ajoudani A, Erfanian A. A neuro-sliding-mode control with adaptive modeling of uncertainty for control of movement in paralyzed limbs using functional electrical stimulation. IEEE Transactions on Biomedical Engineering, 2009, 56(7):1771-1780 doi: 10.1109/TBME.2009.2017030 [20] Farhoud A, Erfanian A. Fully automatic control of paraplegic FES pedaling using higher-order sliding mode and fuzzy logic control. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3):533-542 doi: 10.1109/TNSRE.2013.2296334 [21] 张瑶, 马广富, 郭延宁, 曾添一.一种多幂次滑模趋近律设计与分析.自动化学报, 2016, 42(3):466-472 http://www.aas.net.cn/CN/abstract/abstract18834.shtmlZhang Yao, Ma Guang-Fu, Guo Yan-Ning, Zeng Tian-Yi. A multi power reaching law of sliding mode control design and analysis. Acta Automatica Sinica, 2016, 42(3):466-472 http://www.aas.net.cn/CN/abstract/abstract18834.shtml [22] 李雪冰, 马莉, 丁世宏.一类新的二阶滑模控制方法及其在倒立摆控制中的应用.自动化学报, 2015, 41(1):193-202 http://www.aas.net.cn/CN/abstract/abstract18598.shtmlLi Xue-Bing, Ma Li, Ding Shi-Hong. A new second-order sliding mode control and its application to inverted pendulum. Acta Automatica Sinica, 2015, 41(1):193-202 http://www.aas.net.cn/CN/abstract/abstract18598.shtml [23] Polycarpou M M. Stable adaptive neural control scheme for nonlinear systems. IEEE Transactions on Automatic Control, 1996, 41(3):447-451 doi: 10.1109/9.486648 [24] Abbas J J, Chizeck H J. Neural network control of functional neuromuscular stimulation systems:computer simulation studies. IEEE Transactions on Biomedical Engineering, 1995, 42(11):1117-1127 doi: 10.1109/10.469379 [25] Riener R, Fuhr T. Patient-driven control of FES-supported standing up:a simulation study. IEEE Transactions on Rehabilitation Engineering, 1998, 6(2):113-124 doi: 10.1109/86.681177 [26] 刘金琨.滑模变结构控制MATLAB仿真.第2版.北京:清华大学出版社, 2012. 404-409Liu Jin-Kun. Sliding Mode Control Design and Matlab Simulation (2nd edition). Beijing:Tsinghua University Press, 2012. 404-409 [27] 刘静民.中国成年人人体惯性参数国家标准的制定[博士学位论文], 北京体育大学, 中国, 2004 http://xuewen.cnki.net/CDFD-2004134368.nh.htmlLiu Jin-Min. Establishment of National Standard about Inertial Parameters of Chinese Adults[Ph.D. dissertation], Beijing Sport University, China, 2004 http://xuewen.cnki.net/CDFD-2004134368.nh.html [28] Ferrarin M, Pedotti A. The relationship between electrical stimulus and joint torque:a dynamic model. IEEE Transactions on Rehabilitation Engineering, 2000, 8(3):342-352 doi: 10.1109/86.867876 -

 下载:
下载:


图(11) / 表(1)
计量
- 文章访问数: 2155
- HTML全文浏览量: 670
- PDF下载量: 816
- 被引次数: 0
