2020年 第46卷 第1期
2020, 46(1): 1-23.
doi: 10.16383/j.aas.c180429
摘要:
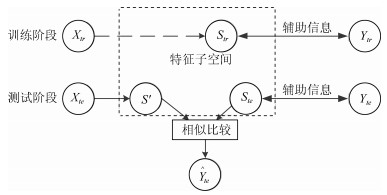
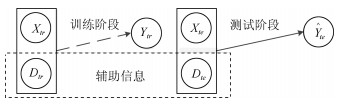
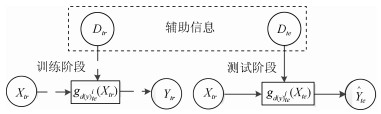
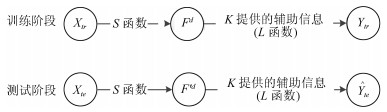
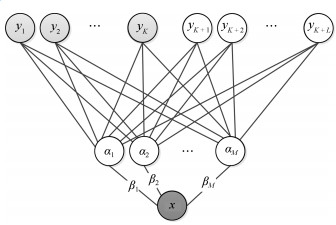
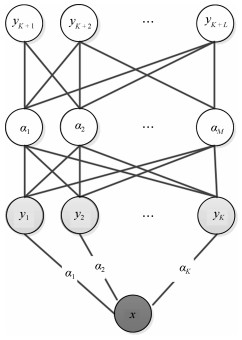
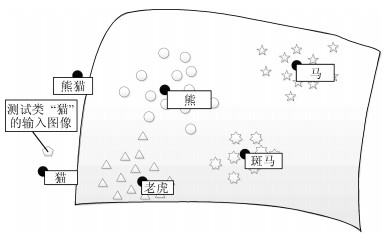
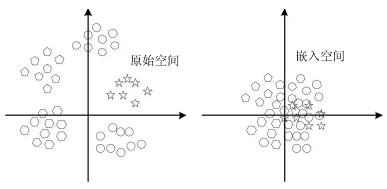
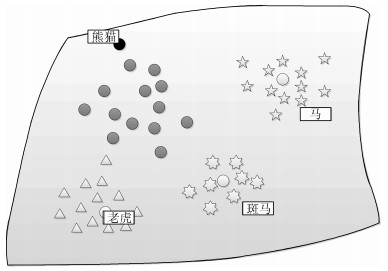
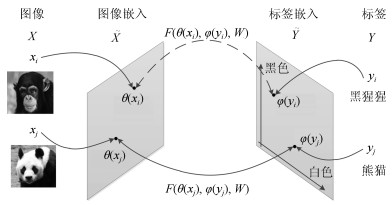
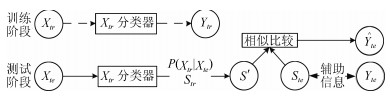
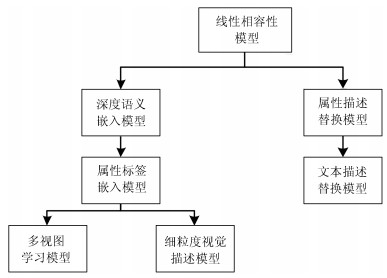
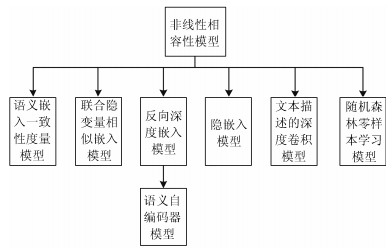
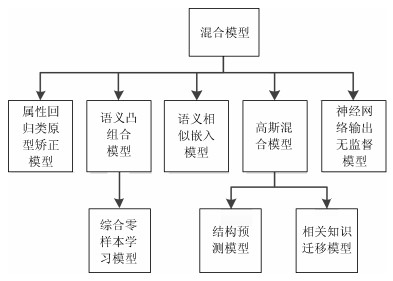
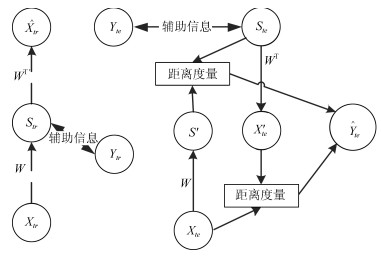
近几年来, 深度学习在机器学习研究领域中取得了巨大的突破, 深度学习能够很好地实现复杂问题的学习, 然而, 深度学习最大的弊端之一, 就是需要大量人工标注的训练数据, 而这需要耗费大量的人力成本.因此, 为了缓解深度学习存在的这一问题, Palatucci等于2009年提出了零样本学习(Zero-shot learning).零样本学习是迁移学习的一种特殊场景, 在零样本学习过程中, 训练类集和测试类集之间没有交集, 需要通过训练类与测试类之间的知识迁移来完成学习, 使在训练类上训练得到的模型能够成功识别测试类输入样例的类标签.零样本学习的意义不仅在于可以对难以标注的样例进行识别, 更在于这一方法模拟了人类对于从未见过的对象的认知过程, 零样本学习方法的研究, 也会在一定程度上促进认知科学的研究.鉴于零样本学习的应用价值、理论意义和未来的发展潜力, 文中系统综述了零样本学习的研究进展, 首先概述了零样本学习的定义, 介绍了4种典型的零样本学习模型, 并对零样本学习存在的关键问题及解决方法进行了介绍, 对零样本学习的多种模型进行了分类和阐述, 并在最后指明了零样本学习进一步研究中需要解决的问题以及未来可能的发展方向.
近几年来, 深度学习在机器学习研究领域中取得了巨大的突破, 深度学习能够很好地实现复杂问题的学习, 然而, 深度学习最大的弊端之一, 就是需要大量人工标注的训练数据, 而这需要耗费大量的人力成本.因此, 为了缓解深度学习存在的这一问题, Palatucci等于2009年提出了零样本学习(Zero-shot learning).零样本学习是迁移学习的一种特殊场景, 在零样本学习过程中, 训练类集和测试类集之间没有交集, 需要通过训练类与测试类之间的知识迁移来完成学习, 使在训练类上训练得到的模型能够成功识别测试类输入样例的类标签.零样本学习的意义不仅在于可以对难以标注的样例进行识别, 更在于这一方法模拟了人类对于从未见过的对象的认知过程, 零样本学习方法的研究, 也会在一定程度上促进认知科学的研究.鉴于零样本学习的应用价值、理论意义和未来的发展潜力, 文中系统综述了零样本学习的研究进展, 首先概述了零样本学习的定义, 介绍了4种典型的零样本学习模型, 并对零样本学习存在的关键问题及解决方法进行了介绍, 对零样本学习的多种模型进行了分类和阐述, 并在最后指明了零样本学习进一步研究中需要解决的问题以及未来可能的发展方向.
2020, 46(1): 24-37.
doi: 10.16383/j.aas.c180275
摘要:
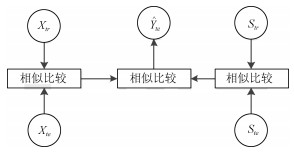
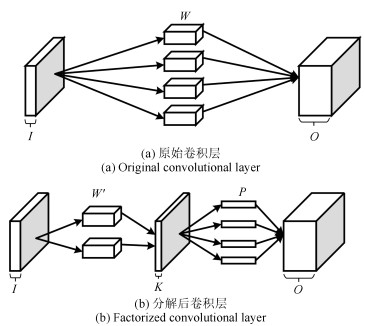
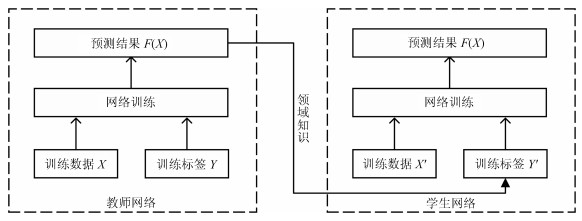
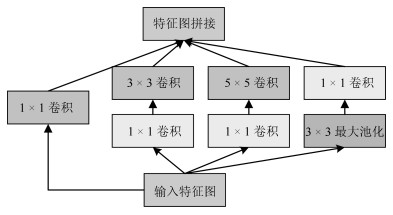
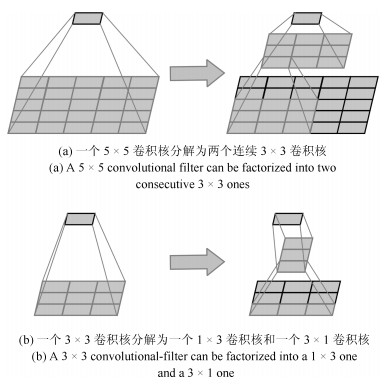
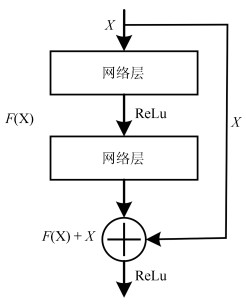
近年来, 卷积神经网络(Convolutional neural network, CNNs)在计算机视觉、自然语言处理、语音识别等领域取得了突飞猛进的发展, 其强大的特征学习能力引起了国内外专家学者广泛关注.然而, 由于深度卷积神经网络普遍规模庞大、计算度复杂, 限制了其在实时要求高和资源受限环境下的应用.对卷积神经网络的结构进行优化以压缩并加速现有网络有助于深度学习在更大范围的推广应用, 目前已成为深度学习社区的一个研究热点.本文整理了卷积神经网络结构优化技术的发展历史、研究现状以及典型方法, 将这些工作归纳为网络剪枝与稀疏化、张量分解、知识迁移和精细模块设计4个方面并进行了较为全面的探讨.最后, 本文对当前研究的热点与难点作了分析和总结, 并对网络结构优化领域未来的发展方向和应用前景进行了展望.
近年来, 卷积神经网络(Convolutional neural network, CNNs)在计算机视觉、自然语言处理、语音识别等领域取得了突飞猛进的发展, 其强大的特征学习能力引起了国内外专家学者广泛关注.然而, 由于深度卷积神经网络普遍规模庞大、计算度复杂, 限制了其在实时要求高和资源受限环境下的应用.对卷积神经网络的结构进行优化以压缩并加速现有网络有助于深度学习在更大范围的推广应用, 目前已成为深度学习社区的一个研究热点.本文整理了卷积神经网络结构优化技术的发展历史、研究现状以及典型方法, 将这些工作归纳为网络剪枝与稀疏化、张量分解、知识迁移和精细模块设计4个方面并进行了较为全面的探讨.最后, 本文对当前研究的热点与难点作了分析和总结, 并对网络结构优化领域未来的发展方向和应用前景进行了展望.




2020, 46(1): 38-46.
doi: 10.16383/j.aas.c170609
摘要:
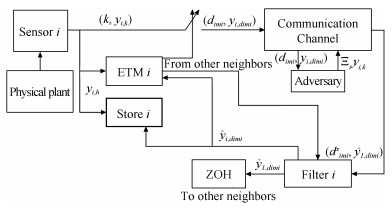
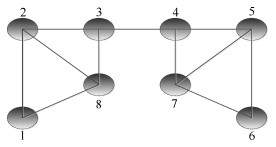
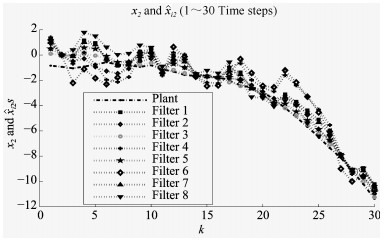
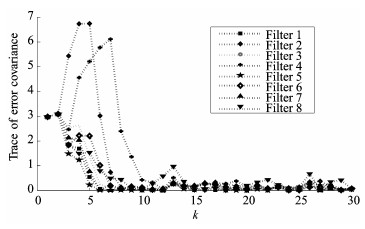
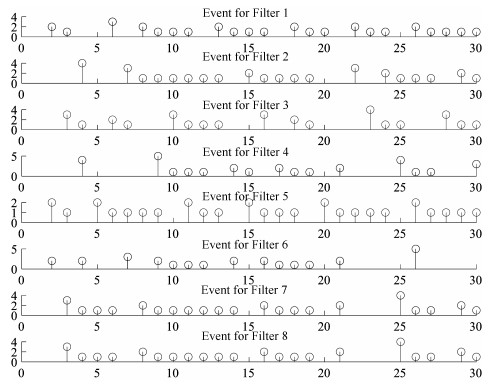
设计了一种分布式扩展卡尔曼滤波器(Extended Kalman filter, EKF), 对非线性目标状态进行估计.在设计过程中, 对滤波误差上界进行优化, 获得了最优滤波增益.此外, 在通信过程中, 考虑恶意攻击信号的同时引入了分布式事件触发机制, 使得系统在保持一定的估计精度的情况下节省通信资源.最后, 以室内的机器人定位问题为例, 验证了提出的滤波器的有效性.
设计了一种分布式扩展卡尔曼滤波器(Extended Kalman filter, EKF), 对非线性目标状态进行估计.在设计过程中, 对滤波误差上界进行优化, 获得了最优滤波增益.此外, 在通信过程中, 考虑恶意攻击信号的同时引入了分布式事件触发机制, 使得系统在保持一定的估计精度的情况下节省通信资源.最后, 以室内的机器人定位问题为例, 验证了提出的滤波器的有效性.


2020, 46(1): 47-57.
doi: 10.16383/j.aas.c190257
摘要:
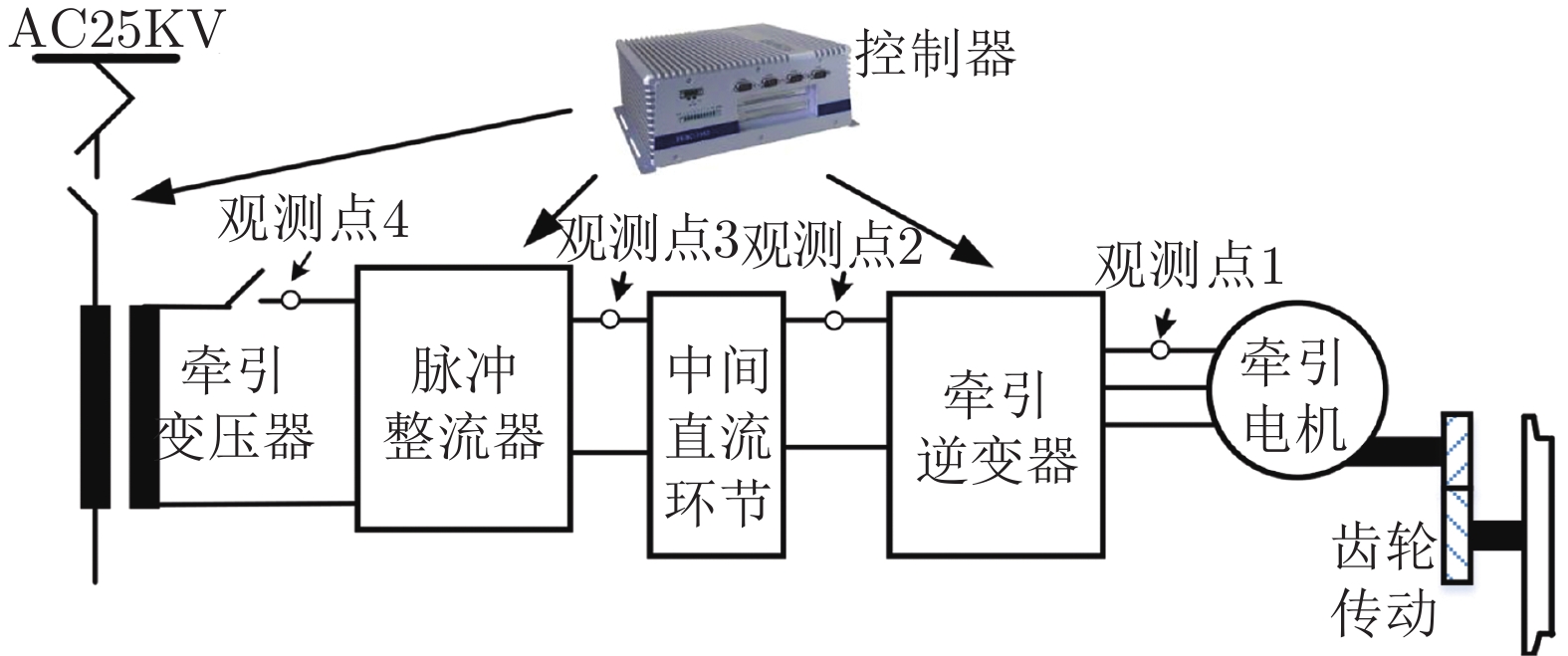
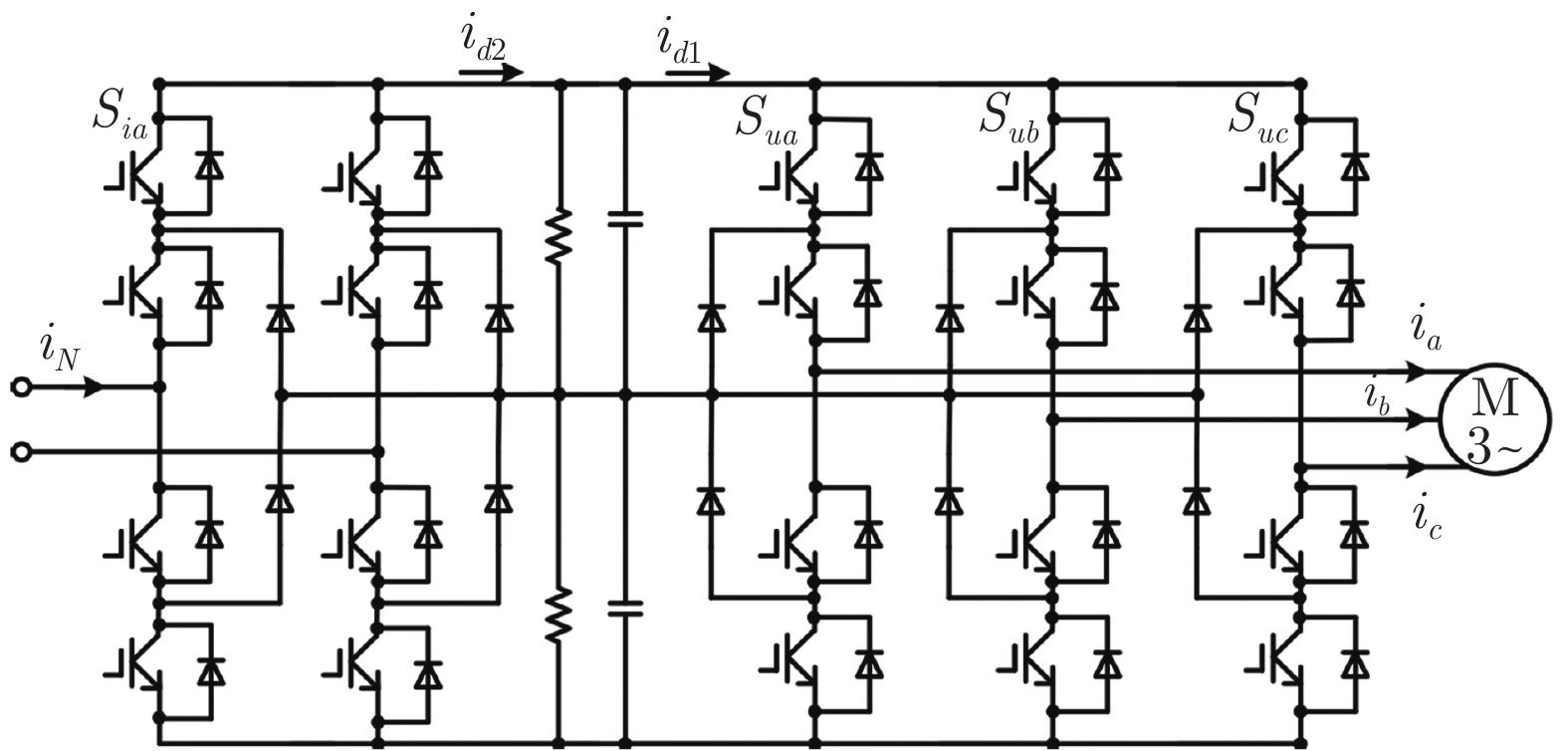
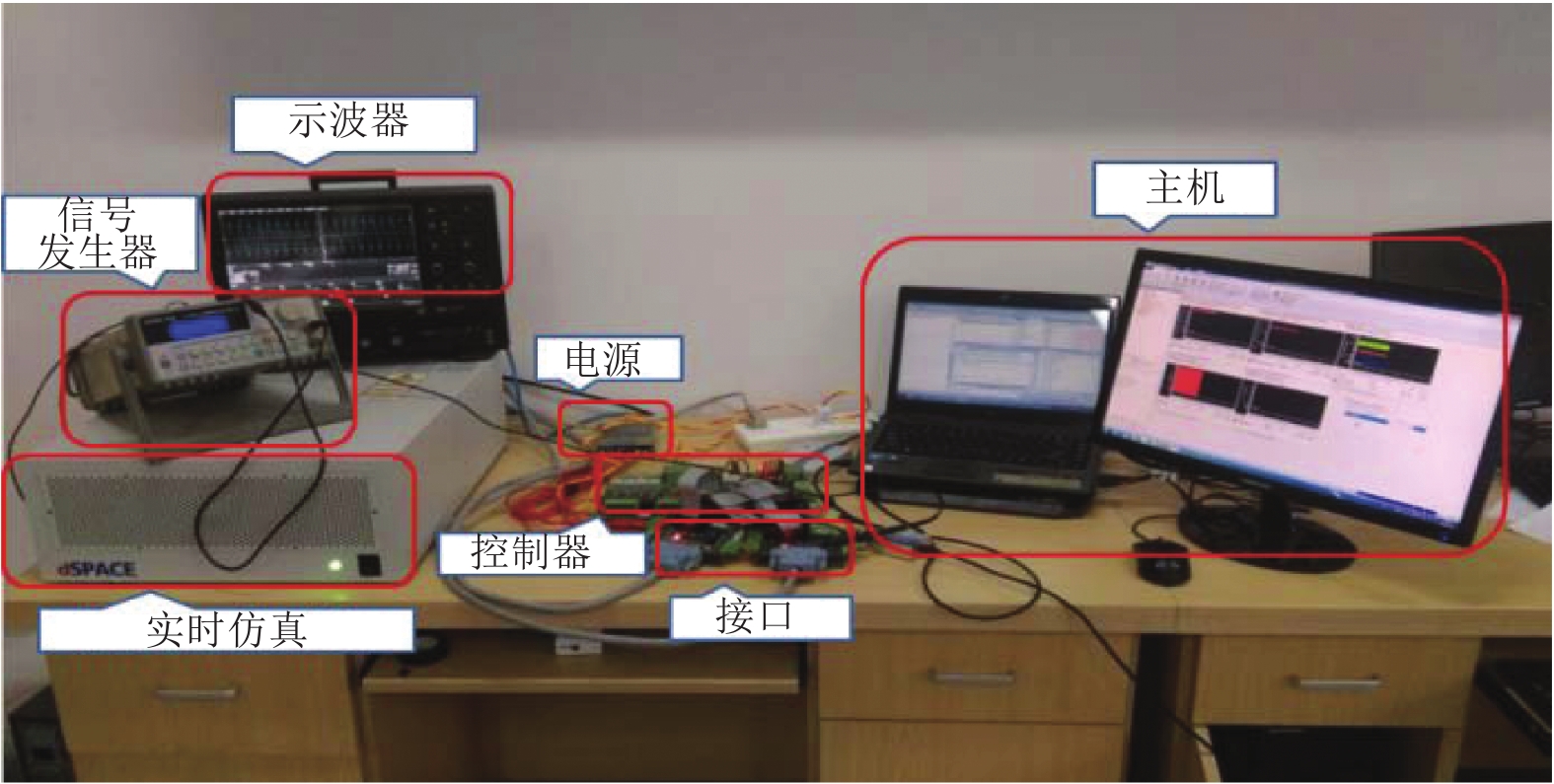
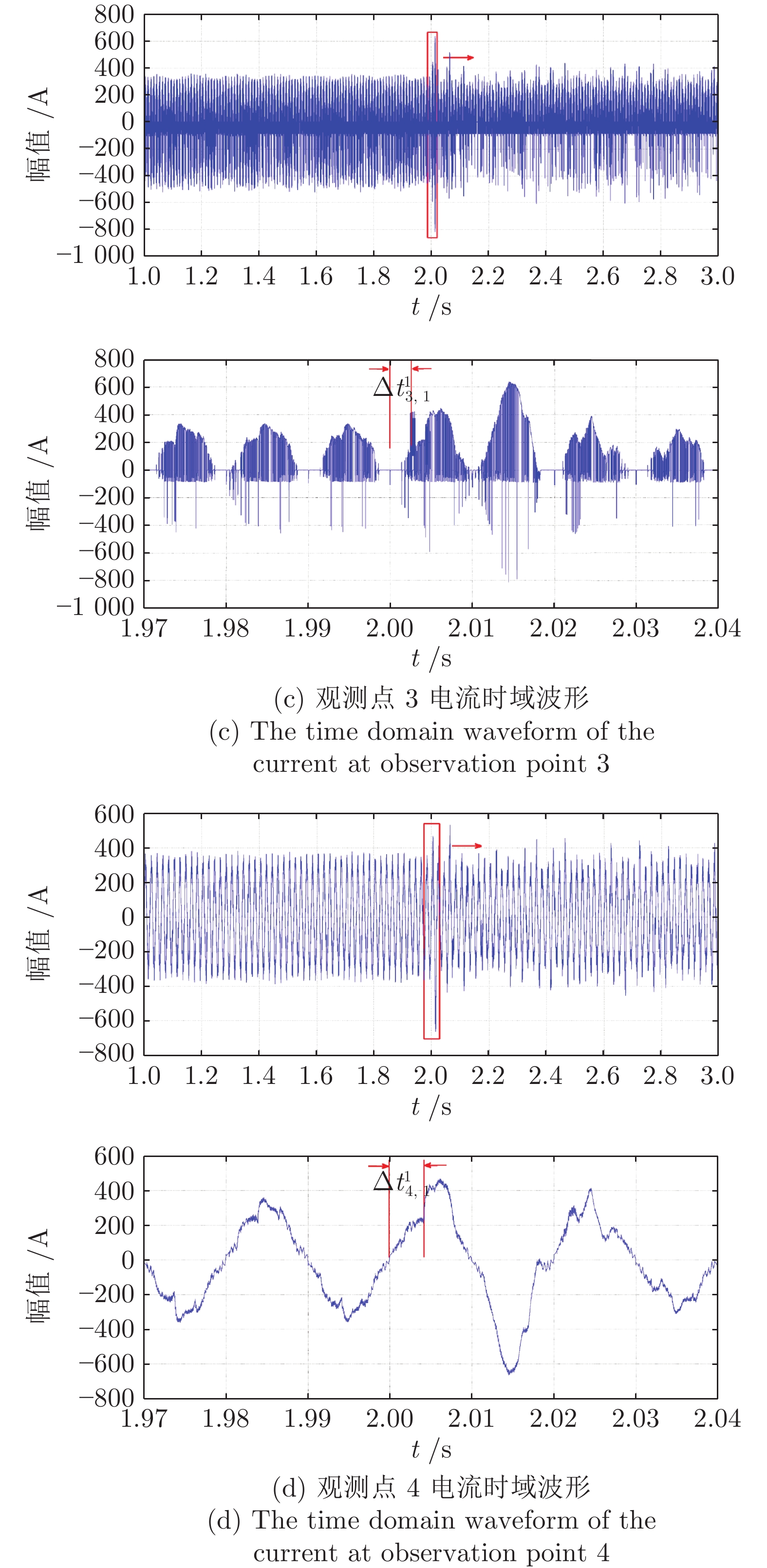
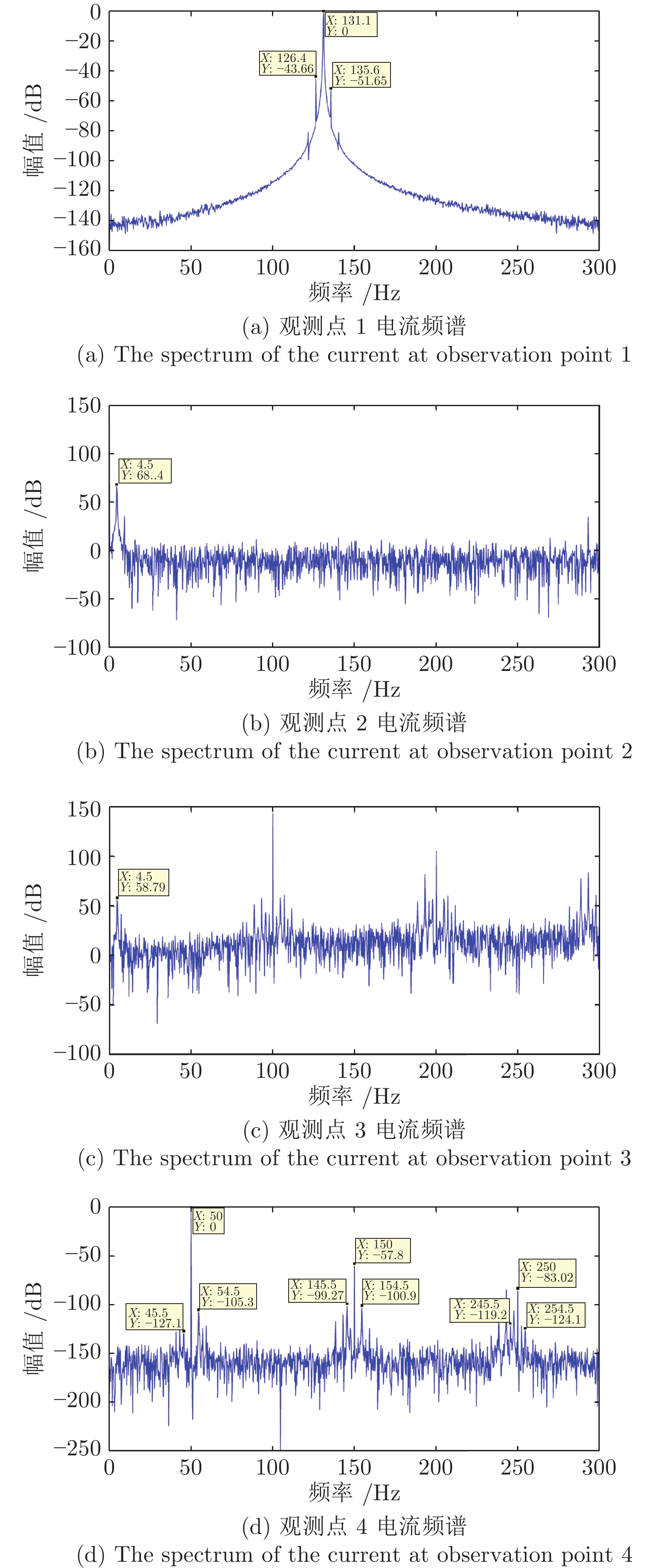
针对故障溯源问题, 提出一种基于故障传播与因果关系的故障溯源方法. 该方法首先建立体现时空特性的系统故障传播模型; 其次利用Granger因果关系技术判定不同观测点信号间的因果关系, 确定适合提取信号故障特征用于故障诊断的观测点; 然后提取系统运行时这些观测点故障特征和故障传播时间; 最后同故障传播模型中对应观测点的时空特性相匹配, 从而确定故障类型与位置, 实现故障溯源. 所提方法在高速列车牵引传动控制系统半实物仿真平台上进行了实验验证, 结果表明该方法可行有效.
针对故障溯源问题, 提出一种基于故障传播与因果关系的故障溯源方法. 该方法首先建立体现时空特性的系统故障传播模型; 其次利用Granger因果关系技术判定不同观测点信号间的因果关系, 确定适合提取信号故障特征用于故障诊断的观测点; 然后提取系统运行时这些观测点故障特征和故障传播时间; 最后同故障传播模型中对应观测点的时空特性相匹配, 从而确定故障类型与位置, 实现故障溯源. 所提方法在高速列车牵引传动控制系统半实物仿真平台上进行了实验验证, 结果表明该方法可行有效.


2020, 46(1): 58-67.
doi: 10.16383/j.aas.c180059
摘要:
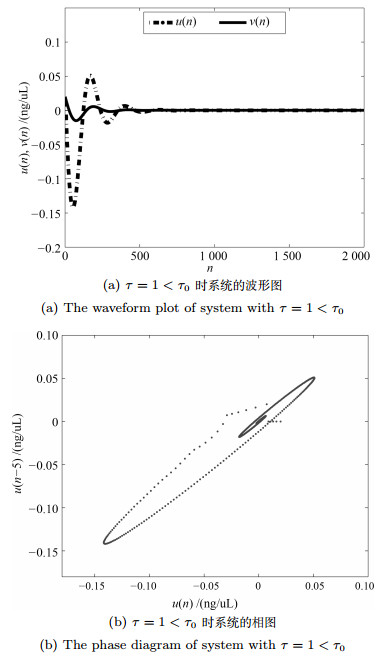
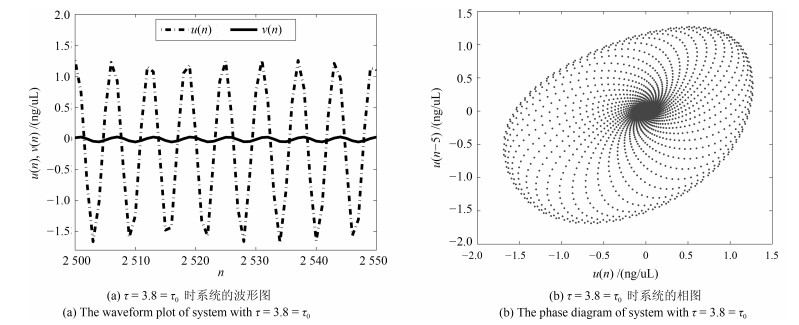
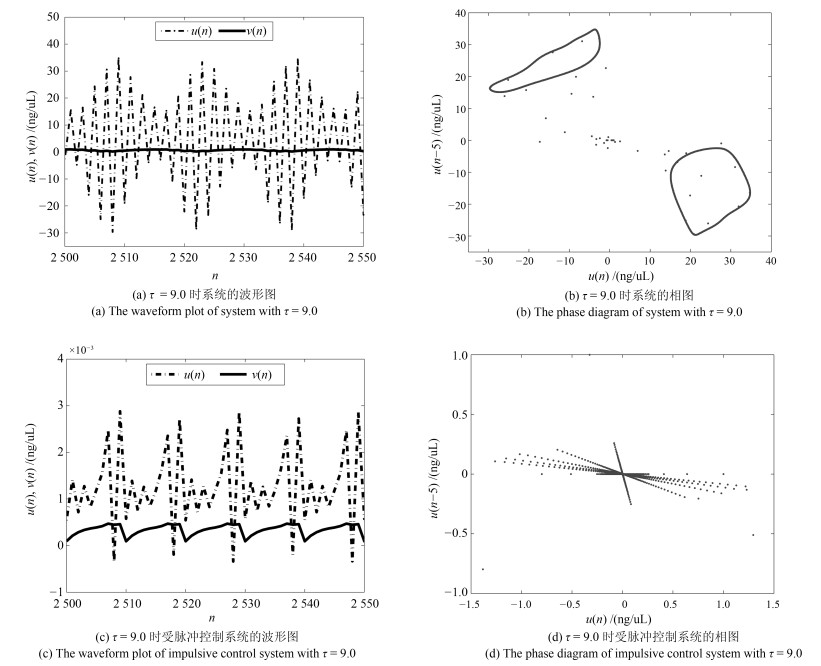
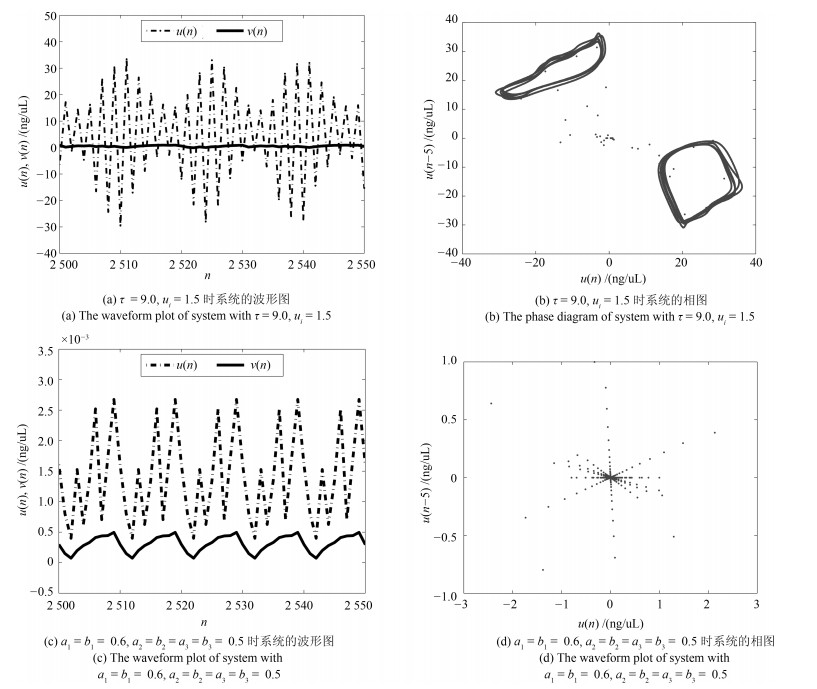
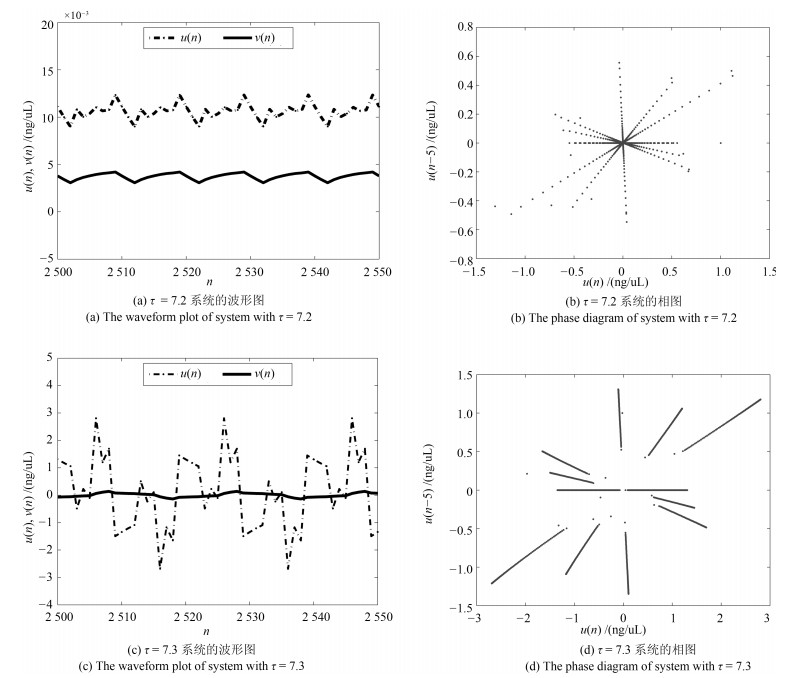
本文在现有脉冲控制理论的基础上, 针对离散时滞系统, 提出了一种扩展脉冲控制的数学描述方法.基于该描述方法, 推导出脉冲控制扩展定理.该扩展定理的合理应用不仅可以有效避免执行器饱和特性的影响, 而且可以分析执行器存在响应时间时系统的稳定性.进一步研究发现, 当系统存在Neimark-Sacker分岔时, 依据扩展定理设计的控制器可以有效提高系统的临界分岔参数.
本文在现有脉冲控制理论的基础上, 针对离散时滞系统, 提出了一种扩展脉冲控制的数学描述方法.基于该描述方法, 推导出脉冲控制扩展定理.该扩展定理的合理应用不仅可以有效避免执行器饱和特性的影响, 而且可以分析执行器存在响应时间时系统的稳定性.进一步研究发现, 当系统存在Neimark-Sacker分岔时, 依据扩展定理设计的控制器可以有效提高系统的临界分岔参数.
2020, 46(1): 68-78.
doi: 10.16383/j.aas.c180350
摘要:
针对一类不确定非线性系统, 结合Backstepping方法, 设计重复学习控制方法.采用Lyapunov-like综合, 设计重复学习控制器处理系统中的参数和非参数不确定性, 可实现系统状态在整个作业区间上完全跟踪期望轨迹.分别讨论部分限幅和完全限幅学习机制, 证明闭环系统中各变量的一致有界性以及跟踪误差的一致收敛性.仿真结果验证了所提出控制方法的有效性.
针对一类不确定非线性系统, 结合Backstepping方法, 设计重复学习控制方法.采用Lyapunov-like综合, 设计重复学习控制器处理系统中的参数和非参数不确定性, 可实现系统状态在整个作业区间上完全跟踪期望轨迹.分别讨论部分限幅和完全限幅学习机制, 证明闭环系统中各变量的一致有界性以及跟踪误差的一致收敛性.仿真结果验证了所提出控制方法的有效性.


2020, 46(1): 79-93.
doi: 10.16383/j.aas.c170714
摘要:
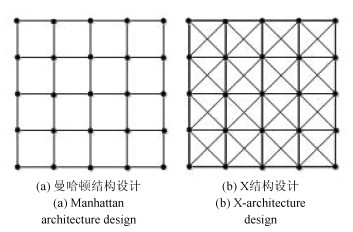
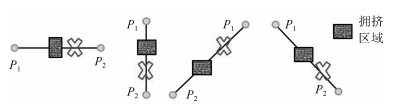
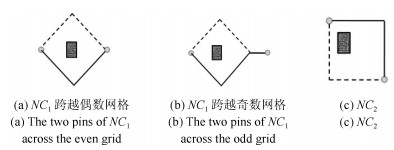
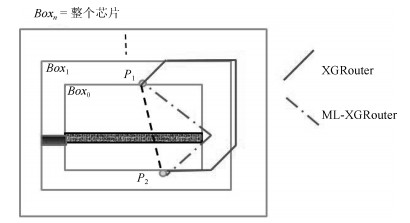
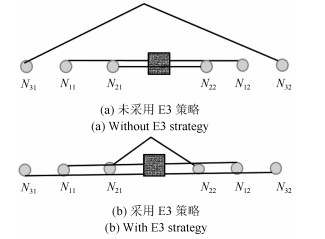
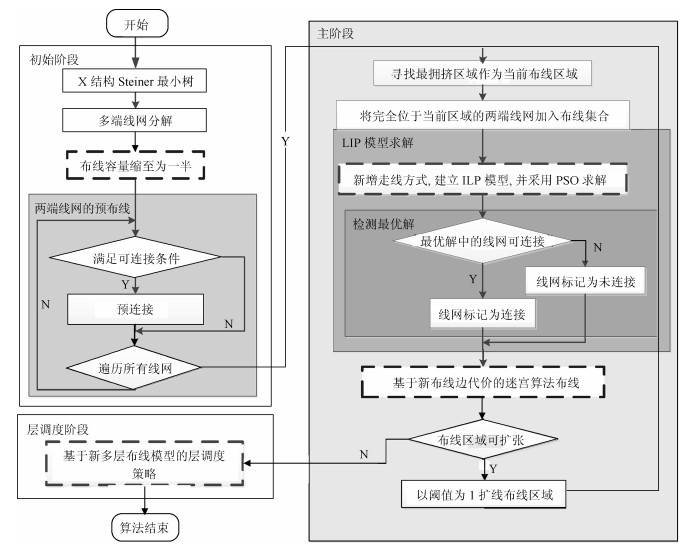
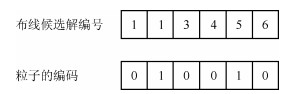
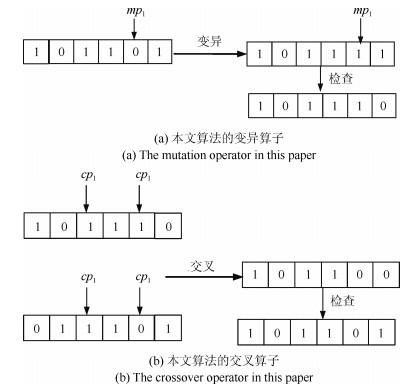
X结构带来物理设计诸多性能的提高, 该结构的引入和多层工艺的普及, 使得总体布线算法更复杂.为此, 在XGRouter布线器的基础上, 本文设计了三种有效的加强策略, 包括: 1)增加新类型的布线方式; 2)粒子群优化(Particle swarm optimization, PSO)算法与基于新布线代价的迷宫布线的结合; 3)初始阶段中预布线容量的缩减策略, 继而引入了多层布线模型, 简化了XGRouter的整数线性规划模型, 最终构建了一种高性能的X结构多层总体布线器, 称为ML-XGRouter.在标准测试电路的仿真实验结果表明, ML-XGRouter相对其他各类总体布线器, 在多层总体布线中最重要的优化目标——溢出数和线长总代价两个指标上均取得最佳.
X结构带来物理设计诸多性能的提高, 该结构的引入和多层工艺的普及, 使得总体布线算法更复杂.为此, 在XGRouter布线器的基础上, 本文设计了三种有效的加强策略, 包括: 1)增加新类型的布线方式; 2)粒子群优化(Particle swarm optimization, PSO)算法与基于新布线代价的迷宫布线的结合; 3)初始阶段中预布线容量的缩减策略, 继而引入了多层布线模型, 简化了XGRouter的整数线性规划模型, 最终构建了一种高性能的X结构多层总体布线器, 称为ML-XGRouter.在标准测试电路的仿真实验结果表明, ML-XGRouter相对其他各类总体布线器, 在多层总体布线中最重要的优化目标——溢出数和线长总代价两个指标上均取得最佳.

2020, 46(1): 94-107.
doi: 10.16383/j.aas.c180590
摘要:
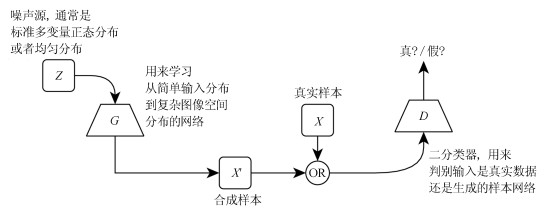
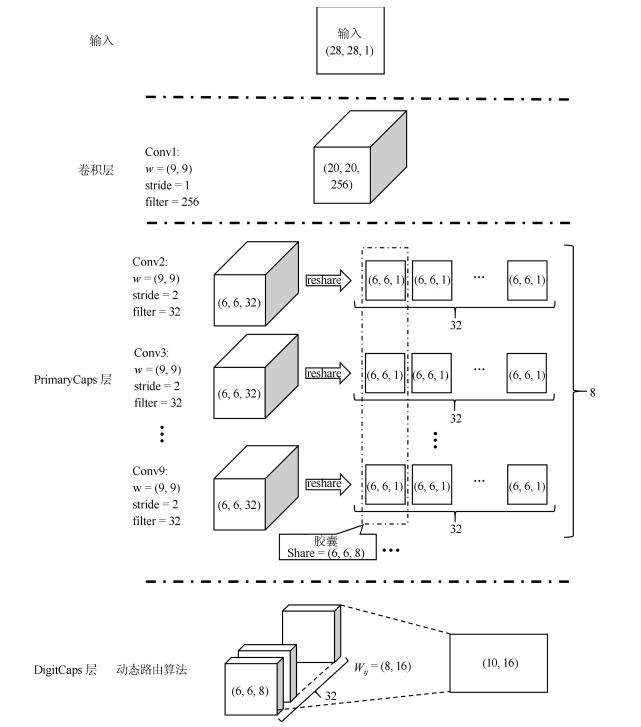
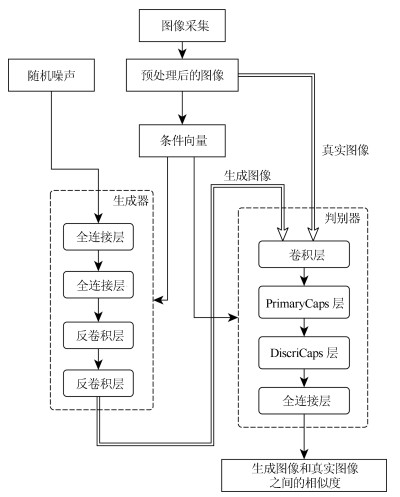
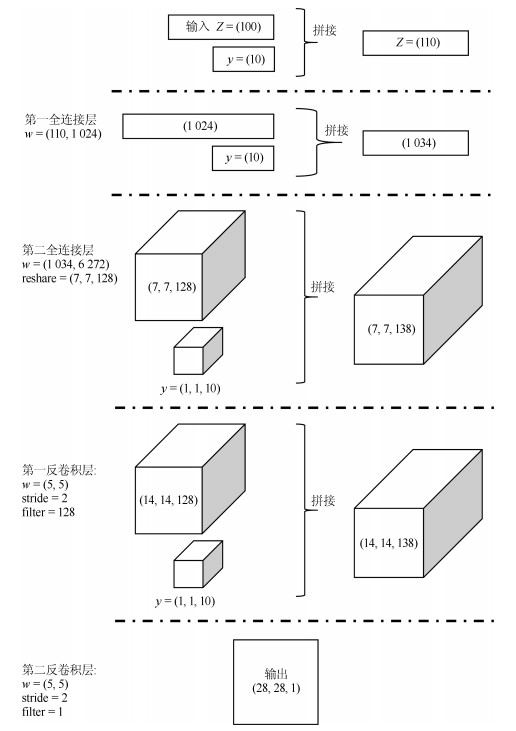
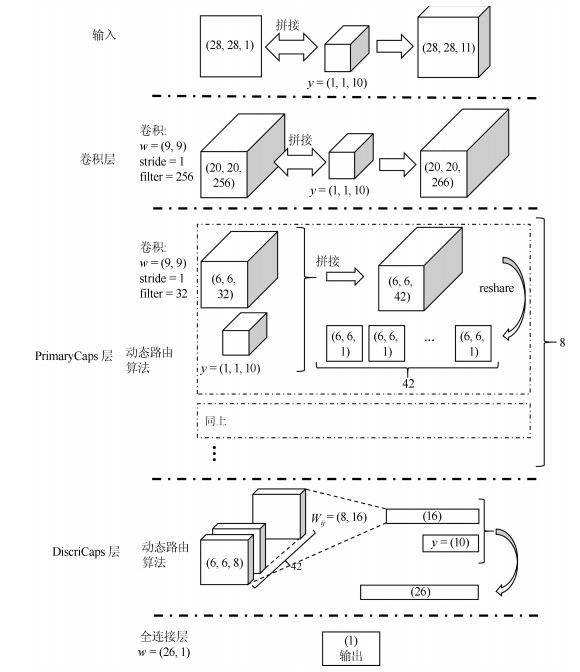
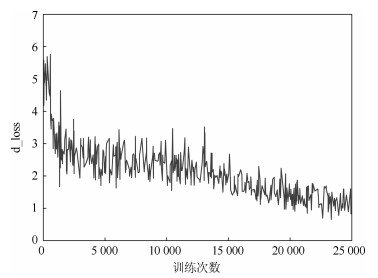
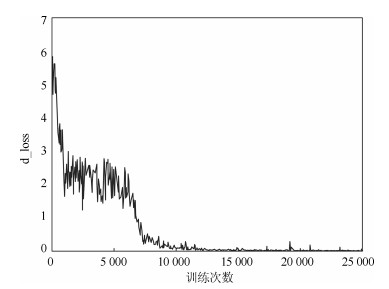
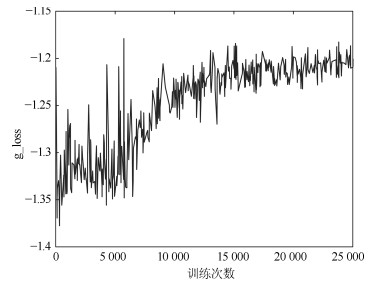
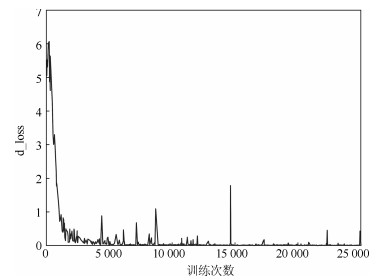
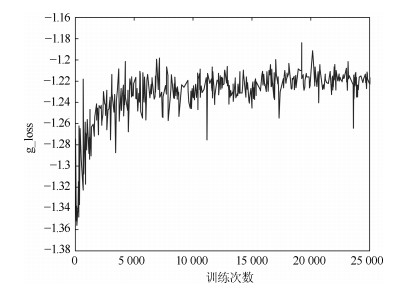
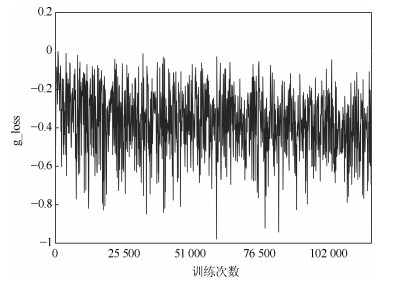
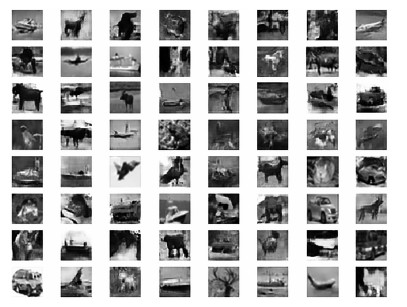
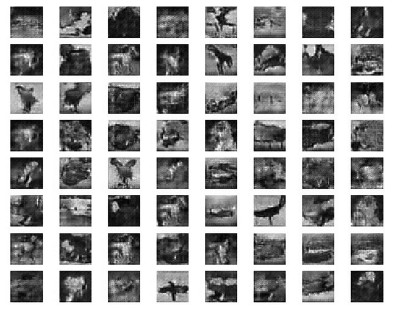
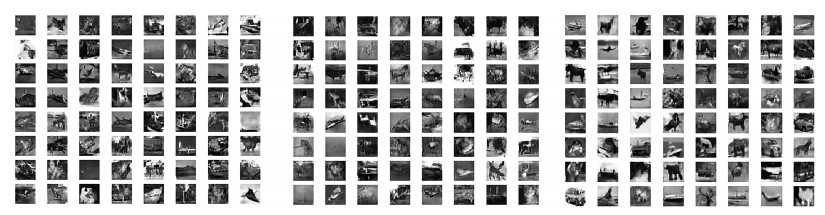
生成式对抗网络(Generative adversarial networks, GAN)是主要的以无监督方式学习深度生成模型的方法之一.基于可微生成器网络的生成式建模方法, 是目前最热门的研究领域, 但由于真实样本分布的复杂性, 导致GAN生成模型在训练过程稳定性、生成质量等方面均存在不少问题.在生成式建模领域, 对网络结构的探索是重要的一个研究方向, 本文利用胶囊神经网络(Capsule networks, CapsNets)重构生成对抗网络模型结构, 在训练过程中使用了Wasserstein GAN (WGAN)中提出的基于Earth-mover距离的损失函数, 并在此基础上加以条件约束来稳定模型生成过程, 从而建立带条件约束的胶囊生成对抗网络(Conditional-CapsuleGAN, C-CapsGAN).通过在MNIST和CIFAR-10数据集上的多组实验, 结果表明将CapsNets应用到生成式建模领域是可行的, 相较于现有类似模型, C-CapsGAN不仅能在图像生成任务中稳定生成高质量图像, 同时还能更有效地抑制模式坍塌情况的发生.
生成式对抗网络(Generative adversarial networks, GAN)是主要的以无监督方式学习深度生成模型的方法之一.基于可微生成器网络的生成式建模方法, 是目前最热门的研究领域, 但由于真实样本分布的复杂性, 导致GAN生成模型在训练过程稳定性、生成质量等方面均存在不少问题.在生成式建模领域, 对网络结构的探索是重要的一个研究方向, 本文利用胶囊神经网络(Capsule networks, CapsNets)重构生成对抗网络模型结构, 在训练过程中使用了Wasserstein GAN (WGAN)中提出的基于Earth-mover距离的损失函数, 并在此基础上加以条件约束来稳定模型生成过程, 从而建立带条件约束的胶囊生成对抗网络(Conditional-CapsuleGAN, C-CapsGAN).通过在MNIST和CIFAR-10数据集上的多组实验, 结果表明将CapsNets应用到生成式建模领域是可行的, 相较于现有类似模型, C-CapsGAN不仅能在图像生成任务中稳定生成高质量图像, 同时还能更有效地抑制模式坍塌情况的发生.









2020, 46(1): 108-116.
doi: 10.16383/j.aas.2018.c180441
摘要:
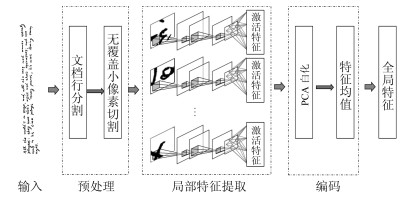
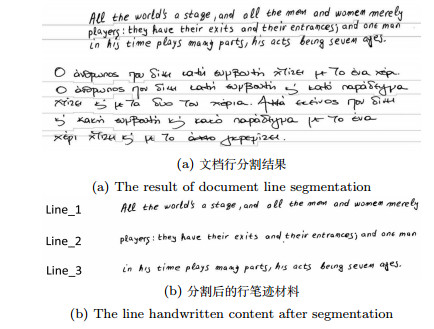
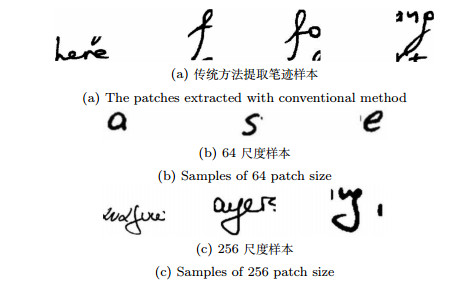
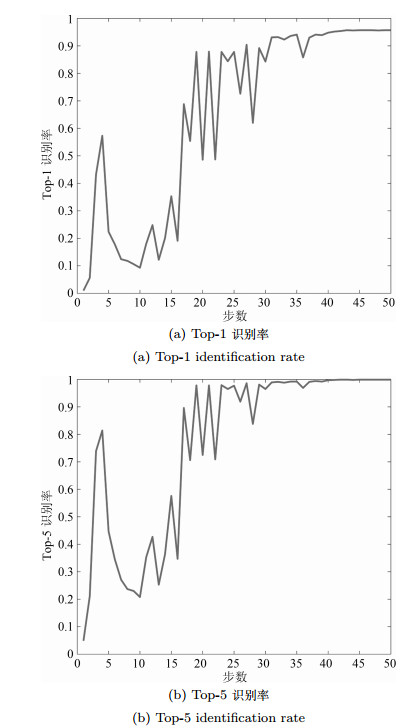
离线笔迹鉴别在司法鉴定与历史文档分析中有重要作用.当前的主要离线笔迹鉴别都是基于局部特征提取的方法, 其在笔迹检索中严重依赖于数据增强和全局编码, 在笔迹识别中需要较多的笔迹信息.针对这一问题, 本文提出一种基于统计的文档行分割与深度卷积神经网络相结合的离线笔迹鉴别方法(DLS-CNN).首先, 使用基于统计的文档行分割方法将笔迹材料分割成小的像素块; 然后, 用优化后的残差神经网络作为识别模型; 最后, 对局部特征使用取均值法进行编码.在ICDAR2013和CVL这两个标准数据集上的实验结果表明, 该方法能有效获得鲁棒的局部特征, 从而仅需要少量的笔迹信息就能取得较高的识别率, 而且不需依赖于数据增强和全局编码就能取得较好的检索效果.实验代码地址:https://github.com/shiming-chen/DLS-CNN.
离线笔迹鉴别在司法鉴定与历史文档分析中有重要作用.当前的主要离线笔迹鉴别都是基于局部特征提取的方法, 其在笔迹检索中严重依赖于数据增强和全局编码, 在笔迹识别中需要较多的笔迹信息.针对这一问题, 本文提出一种基于统计的文档行分割与深度卷积神经网络相结合的离线笔迹鉴别方法(DLS-CNN).首先, 使用基于统计的文档行分割方法将笔迹材料分割成小的像素块; 然后, 用优化后的残差神经网络作为识别模型; 最后, 对局部特征使用取均值法进行编码.在ICDAR2013和CVL这两个标准数据集上的实验结果表明, 该方法能有效获得鲁棒的局部特征, 从而仅需要少量的笔迹信息就能取得较高的识别率, 而且不需依赖于数据增强和全局编码就能取得较好的检索效果.实验代码地址:https://github.com/shiming-chen/DLS-CNN.
2020, 46(1): 117-126.
doi: 10.16383/j.aas.c190052
摘要:
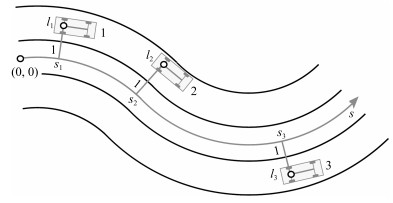
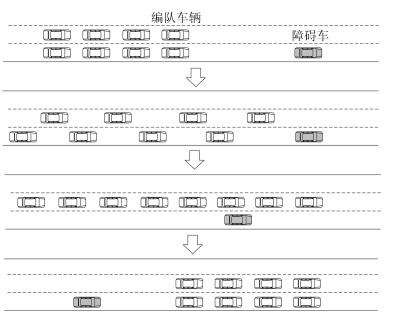
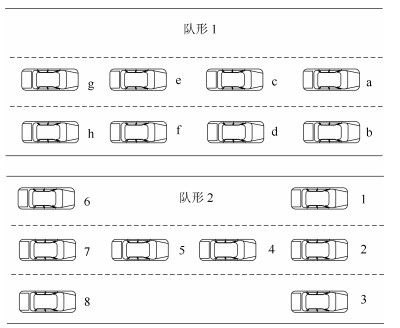
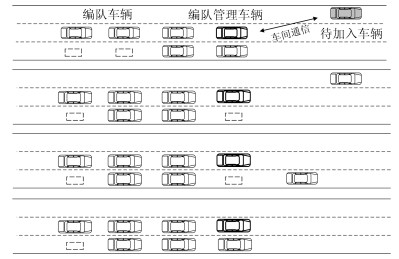
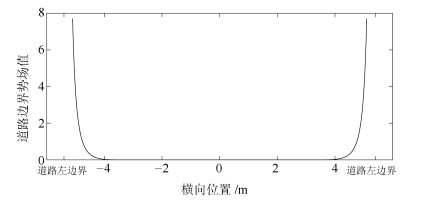
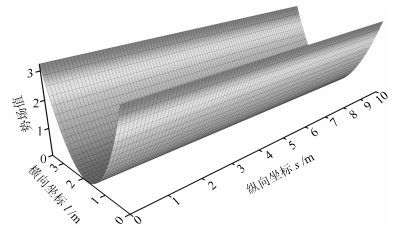
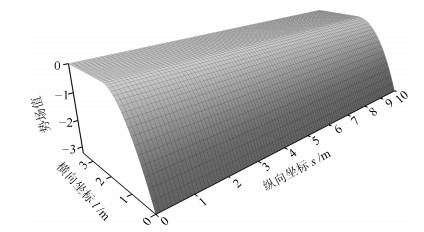
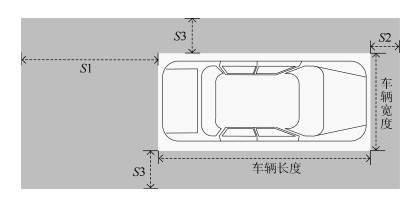
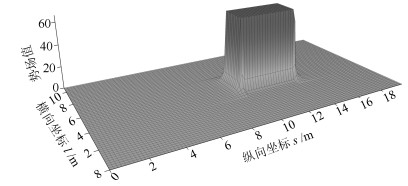
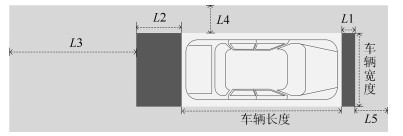
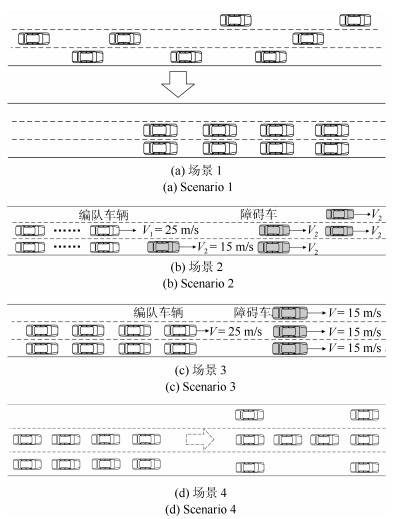
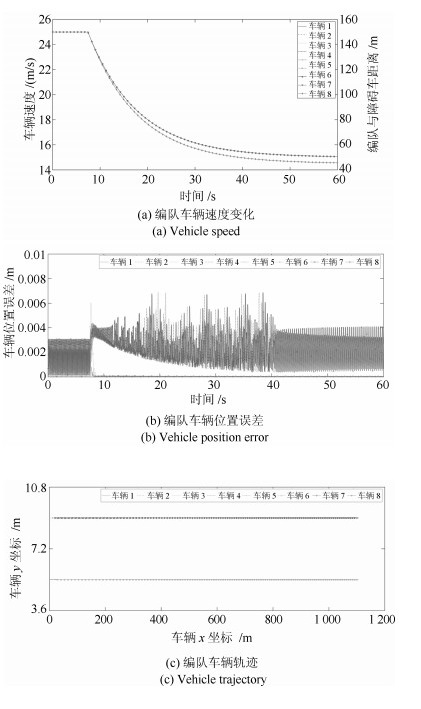
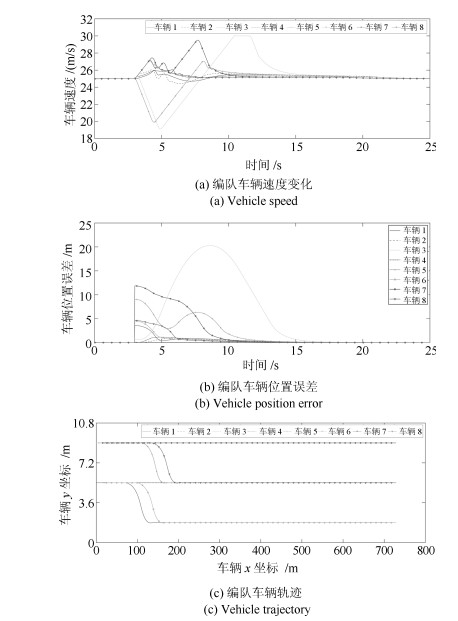
多车协同驾驶能显著提高交通安全和效率, 是未来5G网联自动驾驶技术的重要应用场景之一.传统上, 多车协同驾驶的主要形式为单一车道上的无人车队列, 其队列稳定性受队列长度、通信距离及延迟的限制.本文提出一种无人车编队方法, 将单车道队列扩展为多车道护航编队.针对不同场景下的需求设计多车道编队调整策略, 结合基于图的分布式控制, 完成任意预定义的编队结构; 同时, 利用势场法对行车环境建立势场模型, 实现无人车的避障轨迹规划, 提高编队的避障能力; 最后, 结合纵横向控制器, 实现无人车多车道护航编队控制.仿真实验表明, 本文提出的无人车多车道护航编队方法, 能适应不同交通场景, 如道路变化、障碍车运动等, 完成自动变换编队结构, 实现安全、高效通行.
多车协同驾驶能显著提高交通安全和效率, 是未来5G网联自动驾驶技术的重要应用场景之一.传统上, 多车协同驾驶的主要形式为单一车道上的无人车队列, 其队列稳定性受队列长度、通信距离及延迟的限制.本文提出一种无人车编队方法, 将单车道队列扩展为多车道护航编队.针对不同场景下的需求设计多车道编队调整策略, 结合基于图的分布式控制, 完成任意预定义的编队结构; 同时, 利用势场法对行车环境建立势场模型, 实现无人车的避障轨迹规划, 提高编队的避障能力; 最后, 结合纵横向控制器, 实现无人车多车道护航编队控制.仿真实验表明, 本文提出的无人车多车道护航编队方法, 能适应不同交通场景, 如道路变化、障碍车运动等, 完成自动变换编队结构, 实现安全、高效通行.



2020, 46(1): 127-141.
doi: 10.16383/j.aas.2018.c170493
摘要:
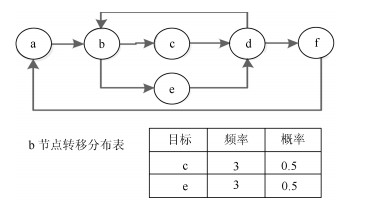
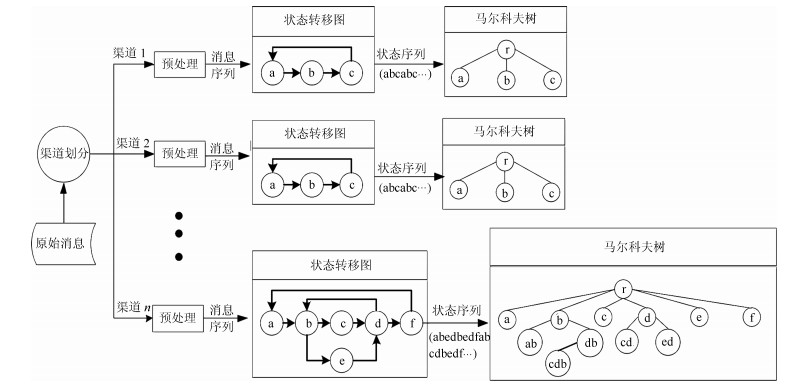
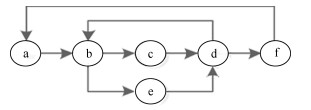
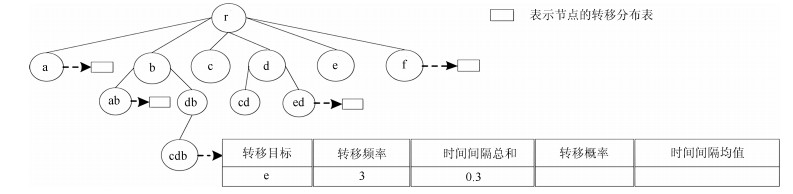
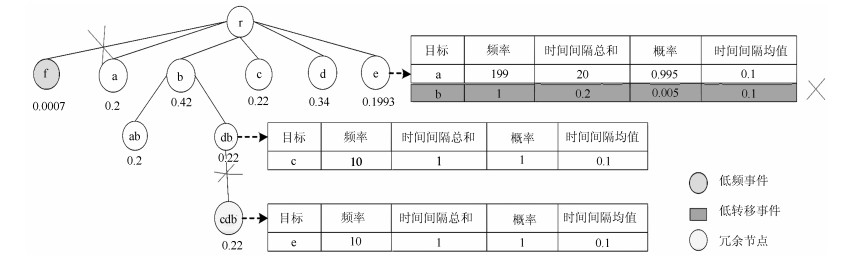
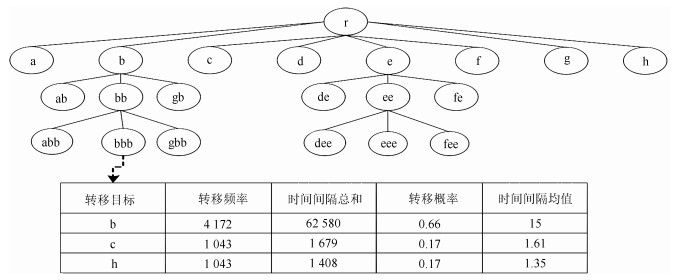
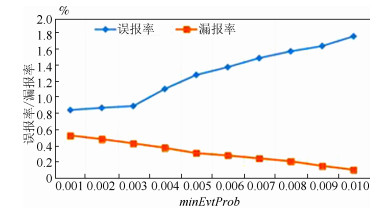
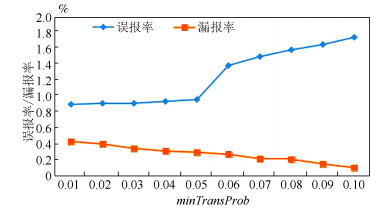
针对工业控制系统中现有异常检测算法在语义攻击检测方面存在的不足, 提出一种基于混合马尔科夫树模型的异常检测算法, 充分利用工业控制系统的阶段性和周期性特征, 构建系统正常运行时的行为模型—混合马尔科夫树.该模型包含合法的状态事件、合法的状态转移、正常的概率分布以及正常的转移时间间隔等4种信息, 基于动态自适应的方法增强状态事件的关联度并引入时间间隔信息以实现对复杂语义攻击的检测, 语义建模时设计一种剪枝策略以去除模型中的低频事件、低转移事件以及冗余节点, 当被检测行为使得模型的以上4种信息产生的偏差超过阈值时, 判定该行为异常.最后, 基于OMNeT++网络仿真环境构建一个简化的污水处理系统对本文算法进行功能性验证, 并利用真实物理测试床的数据集对算法的检测准确度进行性能验证.验证结果表明, 本文算法能有效消除人机交互和常规诊断等操作带来的噪声影响, 对复杂语义攻击具有较高的检出率, 且能识别传统的非语义攻击.
针对工业控制系统中现有异常检测算法在语义攻击检测方面存在的不足, 提出一种基于混合马尔科夫树模型的异常检测算法, 充分利用工业控制系统的阶段性和周期性特征, 构建系统正常运行时的行为模型—混合马尔科夫树.该模型包含合法的状态事件、合法的状态转移、正常的概率分布以及正常的转移时间间隔等4种信息, 基于动态自适应的方法增强状态事件的关联度并引入时间间隔信息以实现对复杂语义攻击的检测, 语义建模时设计一种剪枝策略以去除模型中的低频事件、低转移事件以及冗余节点, 当被检测行为使得模型的以上4种信息产生的偏差超过阈值时, 判定该行为异常.最后, 基于OMNeT++网络仿真环境构建一个简化的污水处理系统对本文算法进行功能性验证, 并利用真实物理测试床的数据集对算法的检测准确度进行性能验证.验证结果表明, 本文算法能有效消除人机交互和常规诊断等操作带来的噪声影响, 对复杂语义攻击具有较高的检出率, 且能识别传统的非语义攻击.





2020, 46(1): 142-152.
doi: 10.16383/j.aas.c180179
摘要:
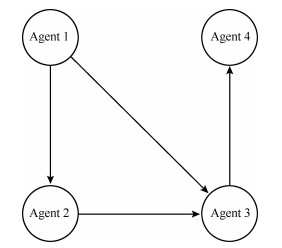
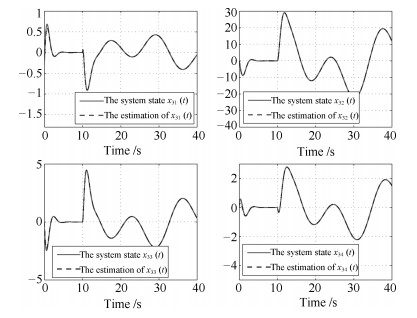
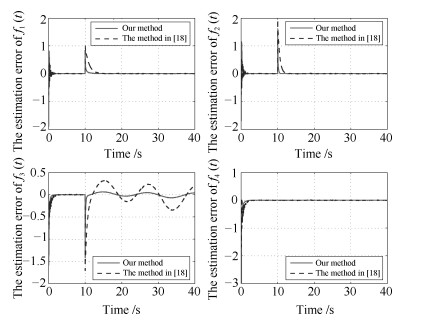
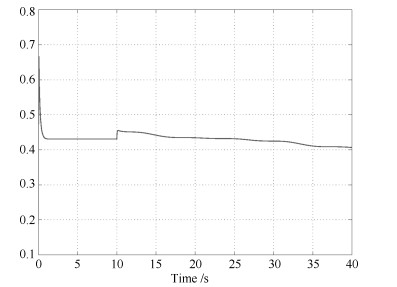
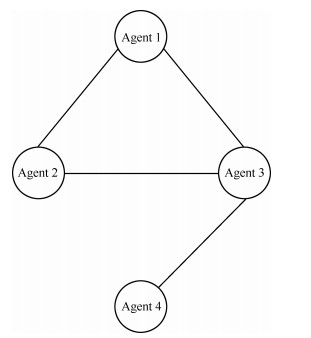
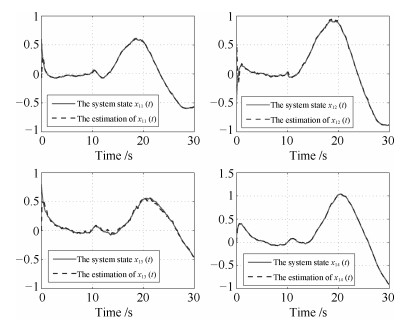
针对发生执行器故障的多智能体系统, 论文提出一种新型分布式中间观测器的设计方法, 可以同时估计系统的状态和故障.本文设计的观测器可以应用于严格正实条件和观测器匹配条件不满足的系统.针对多智能体系统的通讯拓扑是有向图和无向图的情况, 分别获得估计误差系统稳定的条件.观测器的参数矩阵可以通过求解线性矩阵不等式(Linear matrix inequality, LMI)计算.针对具有有向拓扑的多智能体系统, 本文方法所需求解的LMI的维数, 等于对单个智能体系统设计观测器所需求解的LMI的维数.这表明应用本文方法进行故障估计时, 计算量不会随着系统中智能体数目的增加而增加.针对多智能体系统通讯拓扑是无向图的情况, 利用Laplacian矩阵的对称性, 可以得到保守性更小的结论.最后, 仿真算例验证了本文方法的有效性.
针对发生执行器故障的多智能体系统, 论文提出一种新型分布式中间观测器的设计方法, 可以同时估计系统的状态和故障.本文设计的观测器可以应用于严格正实条件和观测器匹配条件不满足的系统.针对多智能体系统的通讯拓扑是有向图和无向图的情况, 分别获得估计误差系统稳定的条件.观测器的参数矩阵可以通过求解线性矩阵不等式(Linear matrix inequality, LMI)计算.针对具有有向拓扑的多智能体系统, 本文方法所需求解的LMI的维数, 等于对单个智能体系统设计观测器所需求解的LMI的维数.这表明应用本文方法进行故障估计时, 计算量不会随着系统中智能体数目的增加而增加.针对多智能体系统通讯拓扑是无向图的情况, 利用Laplacian矩阵的对称性, 可以得到保守性更小的结论.最后, 仿真算例验证了本文方法的有效性.


2020, 46(1): 153-167.
doi: 10.16383/j.aas.2018.c170287
摘要:
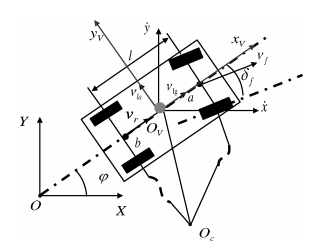
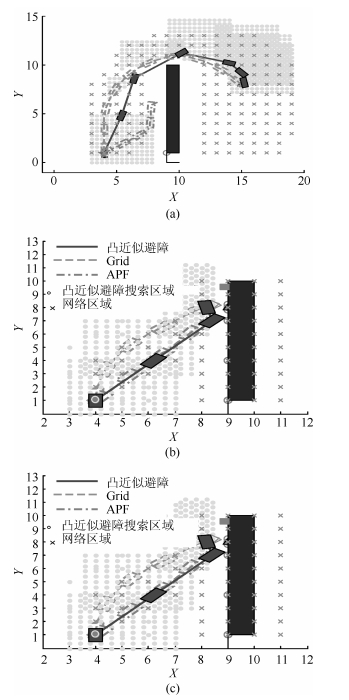
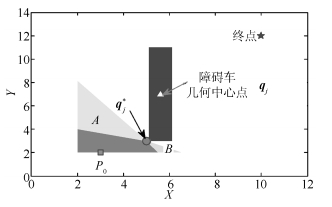
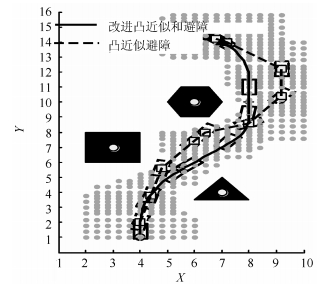
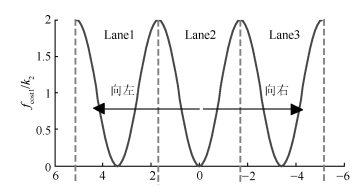
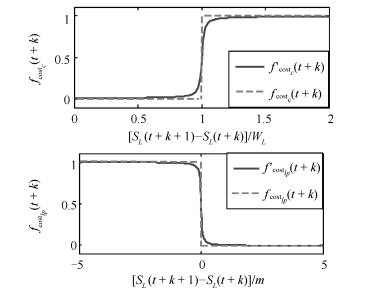
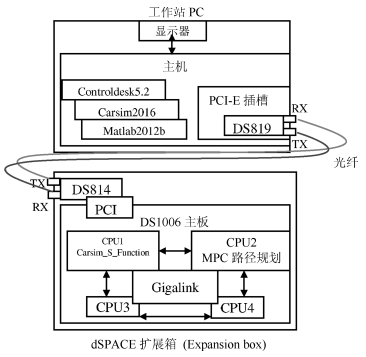
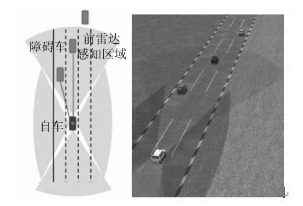
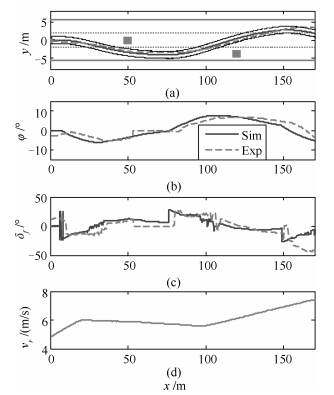
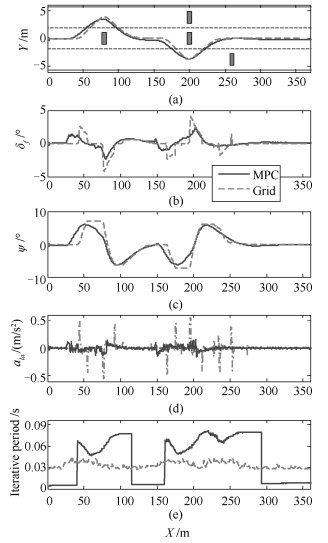
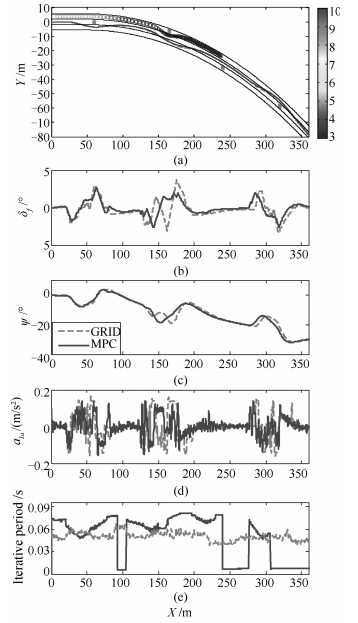
提出了一种改进的无人驾驶车辆路径规划方法, 并搭建了相应的软件在环实时仿真系统, 对方法在结构化道路下的复杂动态交通工况进行性能验证.首先, 引入基于凸近似的避障原理, 对障碍物参考点的选取进行优化, 扩大了路径规划的可行域范围.采用改进后的方法, 并结合模型预测控制(Model predictive control, MPC)原理和曲线坐标系统, 综合考虑自车及障碍车的外形、道路几何约束及自车的机械结构约束、路径最短、侧向加速度、道路对中、逐次变道、车距安全度、左变道优先和前轮转角变化率等权重的影响, 实现了车辆在复杂动态交通工况下的路径规划.最后, 以长城H7运动多用途车作为无人驾驶实验及仿真平台, 搭建基于dSPACE多核架构的Carsim + Simulink软件在环实时仿真系统, 对算法进行验证.结果表明, 所提出的方法不仅可获得合理、平滑的行驶路径, 顺利避开运动障碍车的干扰, 而且具有良好的实时性.
提出了一种改进的无人驾驶车辆路径规划方法, 并搭建了相应的软件在环实时仿真系统, 对方法在结构化道路下的复杂动态交通工况进行性能验证.首先, 引入基于凸近似的避障原理, 对障碍物参考点的选取进行优化, 扩大了路径规划的可行域范围.采用改进后的方法, 并结合模型预测控制(Model predictive control, MPC)原理和曲线坐标系统, 综合考虑自车及障碍车的外形、道路几何约束及自车的机械结构约束、路径最短、侧向加速度、道路对中、逐次变道、车距安全度、左变道优先和前轮转角变化率等权重的影响, 实现了车辆在复杂动态交通工况下的路径规划.最后, 以长城H7运动多用途车作为无人驾驶实验及仿真平台, 搭建基于dSPACE多核架构的Carsim + Simulink软件在环实时仿真系统, 对算法进行验证.结果表明, 所提出的方法不仅可获得合理、平滑的行驶路径, 顺利避开运动障碍车的干扰, 而且具有良好的实时性.




2020, 46(1): 168-177.
doi: 10.16383/j.aas.2018.c170536
摘要:
研究了两个工件集合竞争在一台批处理机上加工的调度问题, 其中每个集合的工件具有一个共同的释放时间.批处理机可以同时加工多个工件作为一批, 每批的加工时间为该批工件中加工时间的最大值.基于两类释放时间的大小, 针对无界批处理机上最小化一个集合工件的最大完工时间、最大延迟以及总完工时间, 使得另一个集合工件的最大完工时间不超过给定上界问题, 分别给出了最优求解方法.针对有界批处理机上最小化一个集合工件的最大完工时间, 使得另一个集合工件的最大完工时间不超过给定上界问题, 证明为一般意义NP--!难问题, 并给出伪多项式时间最优求解方法.
研究了两个工件集合竞争在一台批处理机上加工的调度问题, 其中每个集合的工件具有一个共同的释放时间.批处理机可以同时加工多个工件作为一批, 每批的加工时间为该批工件中加工时间的最大值.基于两类释放时间的大小, 针对无界批处理机上最小化一个集合工件的最大完工时间、最大延迟以及总完工时间, 使得另一个集合工件的最大完工时间不超过给定上界问题, 分别给出了最优求解方法.针对有界批处理机上最小化一个集合工件的最大完工时间, 使得另一个集合工件的最大完工时间不超过给定上界问题, 证明为一般意义NP--!难问题, 并给出伪多项式时间最优求解方法.


2020, 46(1): 178-192.
doi: 10.16383/j.aas.c170241
摘要:
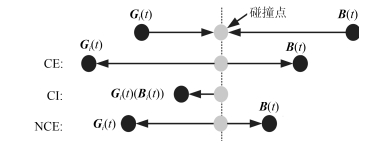
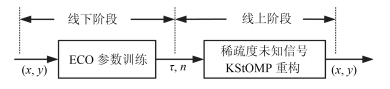
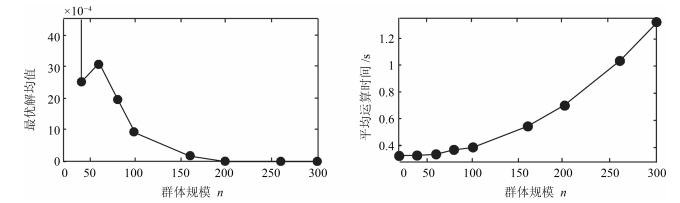
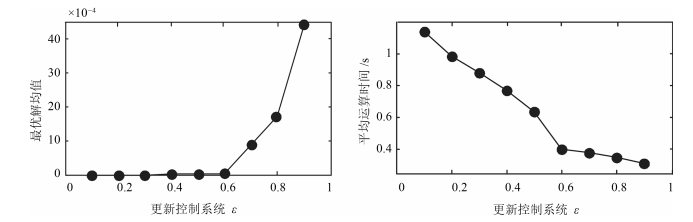
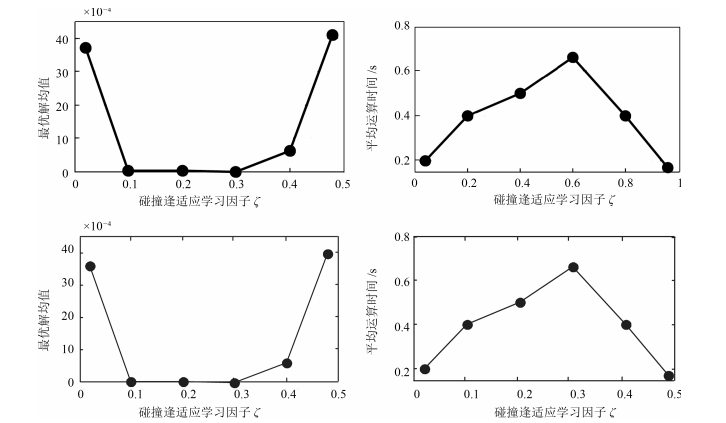
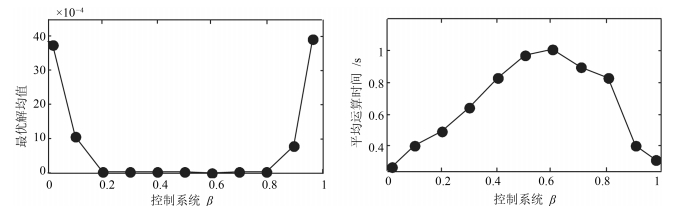
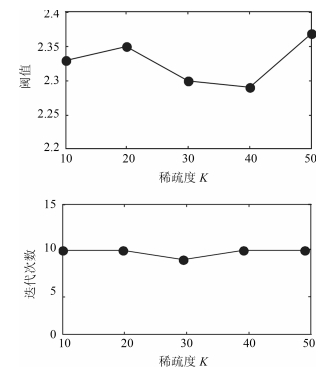
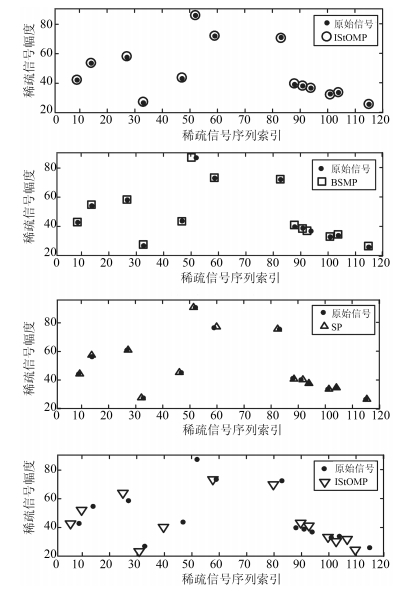
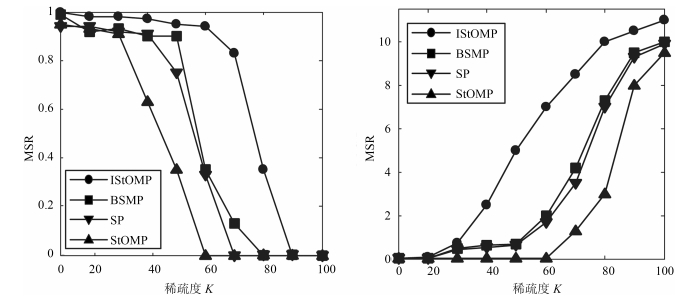
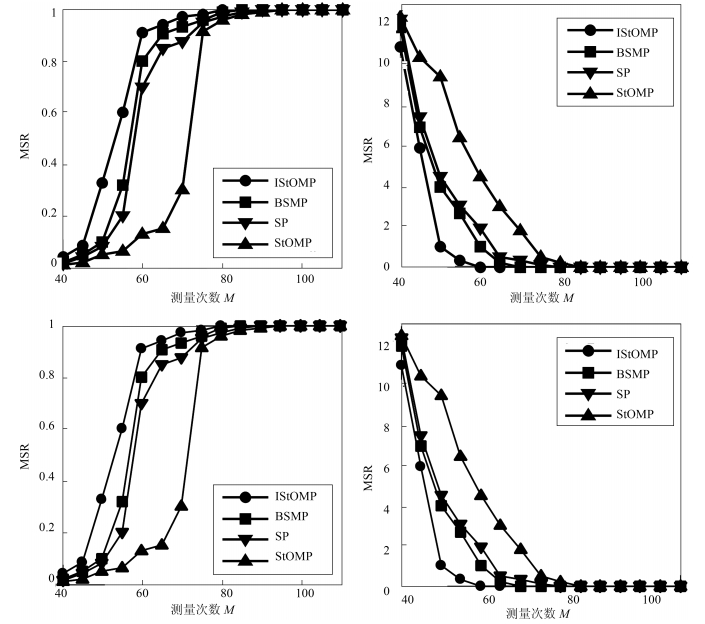
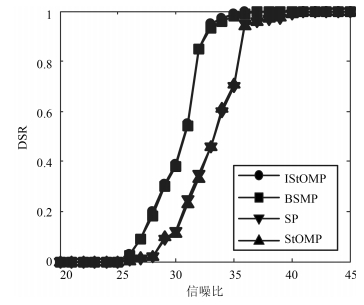
为提高压缩感知(Compressed sensing, CS)大规模稀疏信号重构精度, 提出了一种联合弹性碰撞优化与改进梯度追踪的WSNs (Wireless sensor networks)压缩感知重构算法.首先, 创新地提出一种全新的智能优化算法---弹性碰撞优化算法(Elastic collision optimization algorithm, ECO), ECO模拟物理碰撞信息交互过程, 利用自身历史最优解和种群最优解指导进化方向, 并且个体以N(0, 1)概率形式散落于种群最优解周围, 在有效提升收敛速度的同时扩展了个体搜索空间, 理论定性分析表明ECO依概率1收敛于全局最优解, 而种群多样性指标分析证明了算法全局寻优能力.其次, 针对贪婪重构算法高维稀疏信号重构效率低、稀疏度事先设定的缺陷, 在设计重构有效性指数的基础上将ECO应用于压缩感知重构算法中, 并引入拟牛顿梯度追踪策略, 从而实现对大规模稀疏度未知数据的准确重构.最后, 利用多维测试函数和WSNs数据采集环境进行仿真, 仿真结果表明, ECO在收敛精度和成功率上具有一定优势, 而且相比于其他重构算法, 高维稀疏信号重构结果明显改善.
为提高压缩感知(Compressed sensing, CS)大规模稀疏信号重构精度, 提出了一种联合弹性碰撞优化与改进梯度追踪的WSNs (Wireless sensor networks)压缩感知重构算法.首先, 创新地提出一种全新的智能优化算法---弹性碰撞优化算法(Elastic collision optimization algorithm, ECO), ECO模拟物理碰撞信息交互过程, 利用自身历史最优解和种群最优解指导进化方向, 并且个体以N(0, 1)概率形式散落于种群最优解周围, 在有效提升收敛速度的同时扩展了个体搜索空间, 理论定性分析表明ECO依概率1收敛于全局最优解, 而种群多样性指标分析证明了算法全局寻优能力.其次, 针对贪婪重构算法高维稀疏信号重构效率低、稀疏度事先设定的缺陷, 在设计重构有效性指数的基础上将ECO应用于压缩感知重构算法中, 并引入拟牛顿梯度追踪策略, 从而实现对大规模稀疏度未知数据的准确重构.最后, 利用多维测试函数和WSNs数据采集环境进行仿真, 仿真结果表明, ECO在收敛精度和成功率上具有一定优势, 而且相比于其他重构算法, 高维稀疏信号重构结果明显改善.

2020, 46(1): 193-199.
doi: 10.16383/j.aas.c180012
摘要:
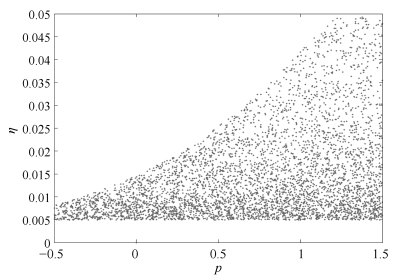
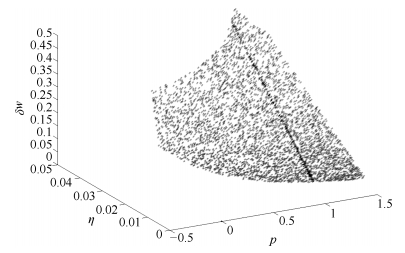
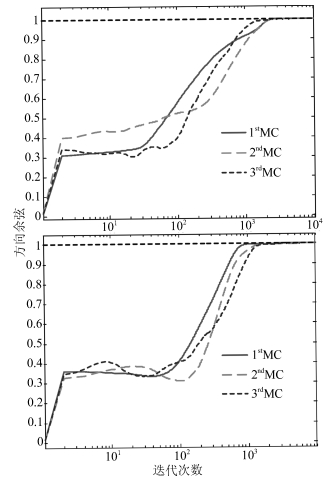
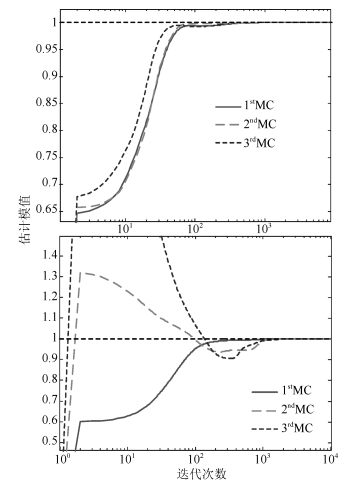
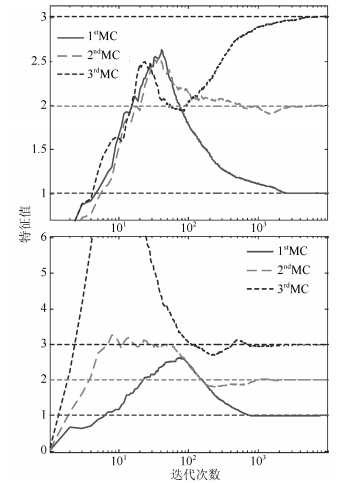
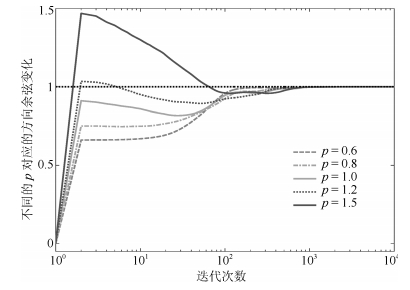
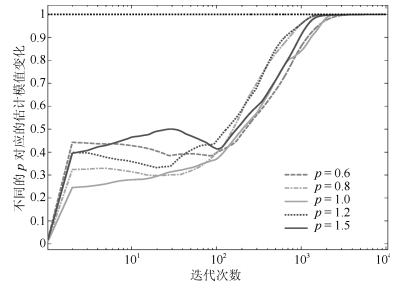
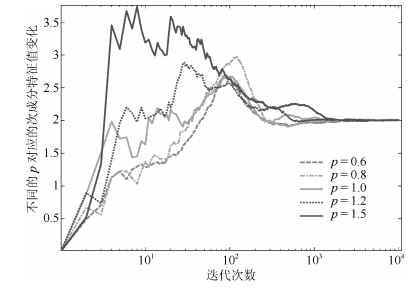
提出一套针对加权Möller算法的广义加权规则用于探讨改进并行提取次成分分析的理论和方法问题.该规则仅在加权Möller算法上引入一个加权规则参数, 通过调节参数后算法性能上的变化, 实现加权Möller算法稳定性在动力学层面上的分析, 探讨加权参数变化对算法稳定性的影响.基于常微分方程方法对所提出规则下的加权Möller算法进行稳定性证明, 并分析其中关键函数的性质.最后, MATLAB仿真验证了所提出规则的性能和算法性质.
提出一套针对加权Möller算法的广义加权规则用于探讨改进并行提取次成分分析的理论和方法问题.该规则仅在加权Möller算法上引入一个加权规则参数, 通过调节参数后算法性能上的变化, 实现加权Möller算法稳定性在动力学层面上的分析, 探讨加权参数变化对算法稳定性的影响.基于常微分方程方法对所提出规则下的加权Möller算法进行稳定性证明, 并分析其中关键函数的性质.最后, MATLAB仿真验证了所提出规则的性能和算法性质.



2020, 46(1): 200-204.
doi: 10.16383/j.aas.c180625
摘要:
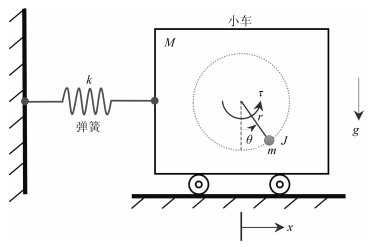
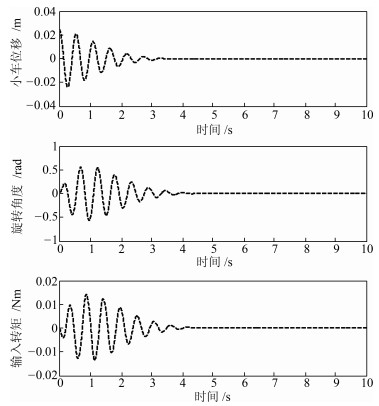
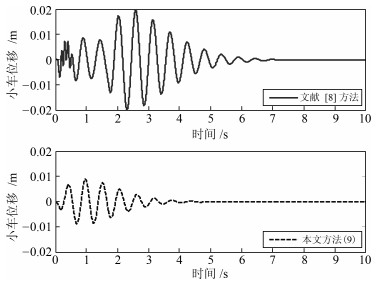
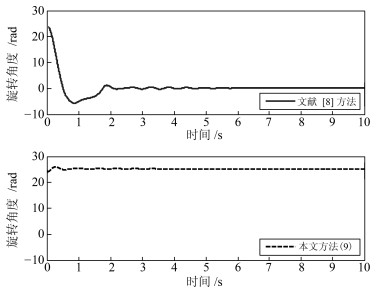
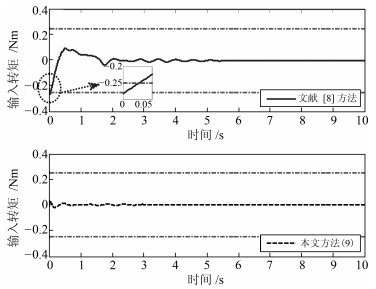
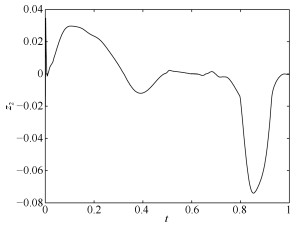
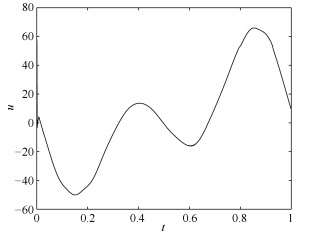
针对欠驱动TORA (Translational oscillations with a rotational actuator)系统, 设计了一种具有执行器饱和约束的输出反馈控制器.与其他现有方法相比, 本文方法不仅考虑了执行器饱和约束和速度信号不可测情形, 而且考虑了旋转小球可能存在的循环行为.具体而言, 首先根据TORA系统模型分析了TORA系统的控制目标; 随后, 构造了一种新颖的能量函数, 在此基础上设计了一种考虑执行器饱和约束的输出反馈控制器, 并通过严格的数学分析证明了闭环系统关于平衡点的稳定性; 最后, 借助数值仿真测试检验了所提控制器的控制性能, 并与已有方法进行了对比.仿真测试结果表明本文所提方法具有更好的控制性能.
针对欠驱动TORA (Translational oscillations with a rotational actuator)系统, 设计了一种具有执行器饱和约束的输出反馈控制器.与其他现有方法相比, 本文方法不仅考虑了执行器饱和约束和速度信号不可测情形, 而且考虑了旋转小球可能存在的循环行为.具体而言, 首先根据TORA系统模型分析了TORA系统的控制目标; 随后, 构造了一种新颖的能量函数, 在此基础上设计了一种考虑执行器饱和约束的输出反馈控制器, 并通过严格的数学分析证明了闭环系统关于平衡点的稳定性; 最后, 借助数值仿真测试检验了所提控制器的控制性能, 并与已有方法进行了对比.仿真测试结果表明本文所提方法具有更好的控制性能.