2019年 第45卷 第2期
2019, 45(2): 234-251.
doi: 10.16383/j.aas.c180674
摘要:
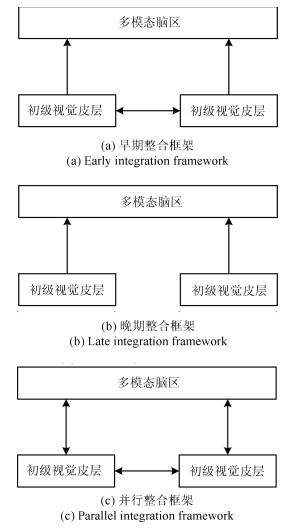
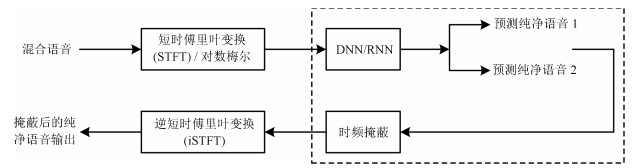
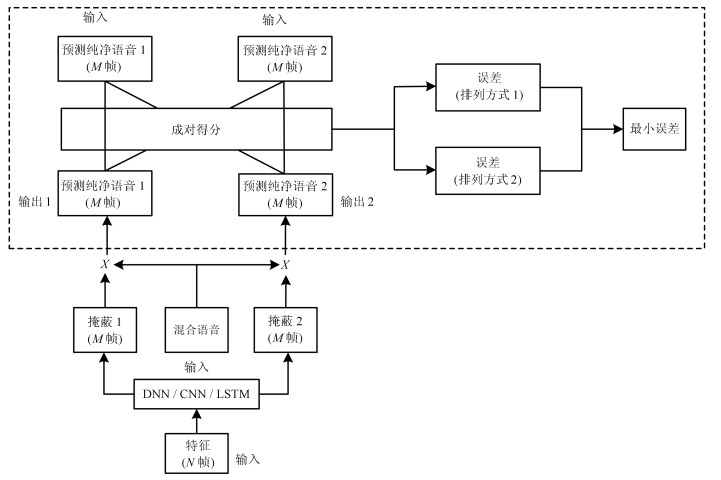
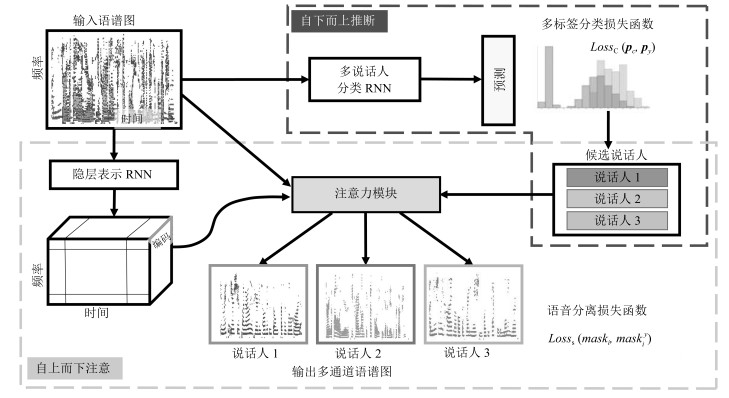
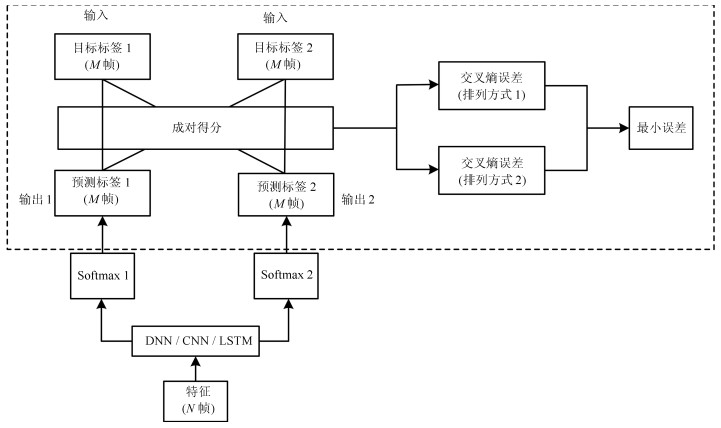
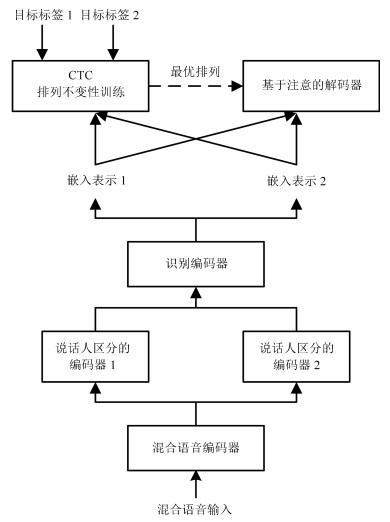
近些年,随着电子设备和人工智能技术的飞速发展,人机语音交互的重要性日益凸显.然而,由于干扰声源的存在,在鸡尾酒会等复杂开放环境下的语音交互技术远没有达到令人满意的程度.现阶段,开发一个具备较强自适应性和鲁棒性的听觉计算系统仍然是一件极具挑战性的任务.因此,鸡尾酒会问题的深入探索对智能语音处理领域中的说话人识别、语音识别、关键词唤醒等一系列重要任务都具有非常重要的研究意义和应用价值.本文综述了鸡尾酒会问题相关听觉模型研究的现状与展望.在简要介绍了听觉机理的相关研究,并概括了解决鸡尾酒会问题的多说话人语音分离相关计算模型之后,本文还讨论了受听觉认知机理启发的听觉注意建模方法,认为融入声纹记忆和注意选择的听觉模型在复杂的听觉环境下具有更好的适应性.之后,本文简单回顾了近期的多说话人语音识别模型.最后,本文讨论了目前各类计算模型用于处理鸡尾酒会问题时遇到的困难和挑战,并对未来的研究方向进行了展望.
近些年,随着电子设备和人工智能技术的飞速发展,人机语音交互的重要性日益凸显.然而,由于干扰声源的存在,在鸡尾酒会等复杂开放环境下的语音交互技术远没有达到令人满意的程度.现阶段,开发一个具备较强自适应性和鲁棒性的听觉计算系统仍然是一件极具挑战性的任务.因此,鸡尾酒会问题的深入探索对智能语音处理领域中的说话人识别、语音识别、关键词唤醒等一系列重要任务都具有非常重要的研究意义和应用价值.本文综述了鸡尾酒会问题相关听觉模型研究的现状与展望.在简要介绍了听觉机理的相关研究,并概括了解决鸡尾酒会问题的多说话人语音分离相关计算模型之后,本文还讨论了受听觉认知机理启发的听觉注意建模方法,认为融入声纹记忆和注意选择的听觉模型在复杂的听觉环境下具有更好的适应性.之后,本文简单回顾了近期的多说话人语音识别模型.最后,本文讨论了目前各类计算模型用于处理鸡尾酒会问题时遇到的困难和挑战,并对未来的研究方向进行了展望.

2019, 45(2): 252-264.
doi: 10.16383/j.aas.c180068
摘要:
如何利用有限的星上资源执行复杂繁重的空间任务长期以来备受关注,随着卫星载荷能力不断提升,响应时间要求不断缩短,卫星自主与协同任务调度规划研究的重要性逐渐增大.本文从单星任务调度规划为起点,对单星地面离线任务调度规划、单星星上在线任务调度规划、单星星地一体化自主任务调度规划研究现状进行梳理与分析,然后延展至多星领域,综述了多星地面离线协同任务调度规划、多星星上在线协同任务调度规划、多星星地一体协同任务调度规划研究现状.最后,对卫星自主与协同任务调度规划研究进行了总结与展望.
如何利用有限的星上资源执行复杂繁重的空间任务长期以来备受关注,随着卫星载荷能力不断提升,响应时间要求不断缩短,卫星自主与协同任务调度规划研究的重要性逐渐增大.本文从单星任务调度规划为起点,对单星地面离线任务调度规划、单星星上在线任务调度规划、单星星地一体化自主任务调度规划研究现状进行梳理与分析,然后延展至多星领域,综述了多星地面离线协同任务调度规划、多星星上在线协同任务调度规划、多星星地一体协同任务调度规划研究现状.最后,对卫星自主与协同任务调度规划研究进行了总结与展望.
2019, 45(2): 265-275.
doi: 10.16383/j.aas.2018.c170394
摘要:
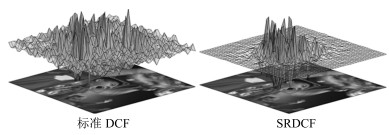
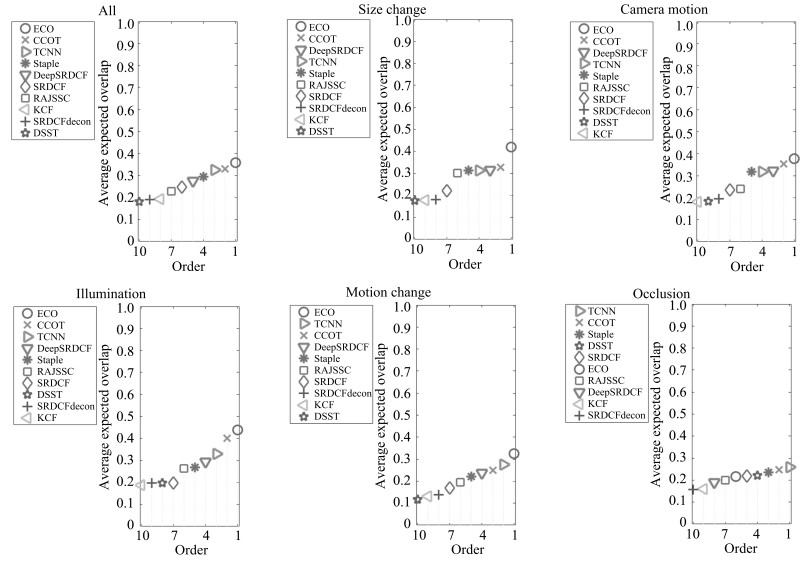
视频跟踪是计算机视觉的重要组成部分,可在智能交通、医疗诊断等实际应用中发挥重要作用.近年来,相关滤波器凭借精度高、速度快的优势,逐步发展为视频跟踪方法的主要研究方向之一,可以很好地处理多种视频跟踪难题.随着基于相关滤波器的视频跟踪系列方法被相继提出,算法设计趋于完善,跟踪效果也趋于精准.本文从不同角度总结了多种具有代表性的相关滤波跟踪方法,分析了各种方法的发展进程,并预测了未来可能的发展方向.
视频跟踪是计算机视觉的重要组成部分,可在智能交通、医疗诊断等实际应用中发挥重要作用.近年来,相关滤波器凭借精度高、速度快的优势,逐步发展为视频跟踪方法的主要研究方向之一,可以很好地处理多种视频跟踪难题.随着基于相关滤波器的视频跟踪系列方法被相继提出,算法设计趋于完善,跟踪效果也趋于精准.本文从不同角度总结了多种具有代表性的相关滤波跟踪方法,分析了各种方法的发展进程,并预测了未来可能的发展方向.

2019, 45(2): 276-288.
doi: 10.16383/j.aas.2018.c170219
摘要:
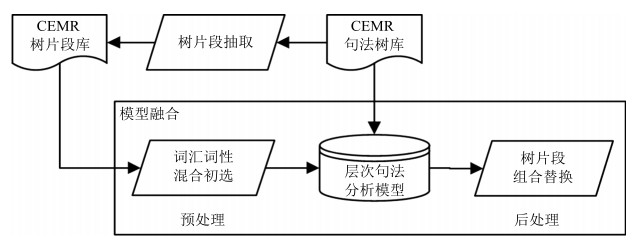
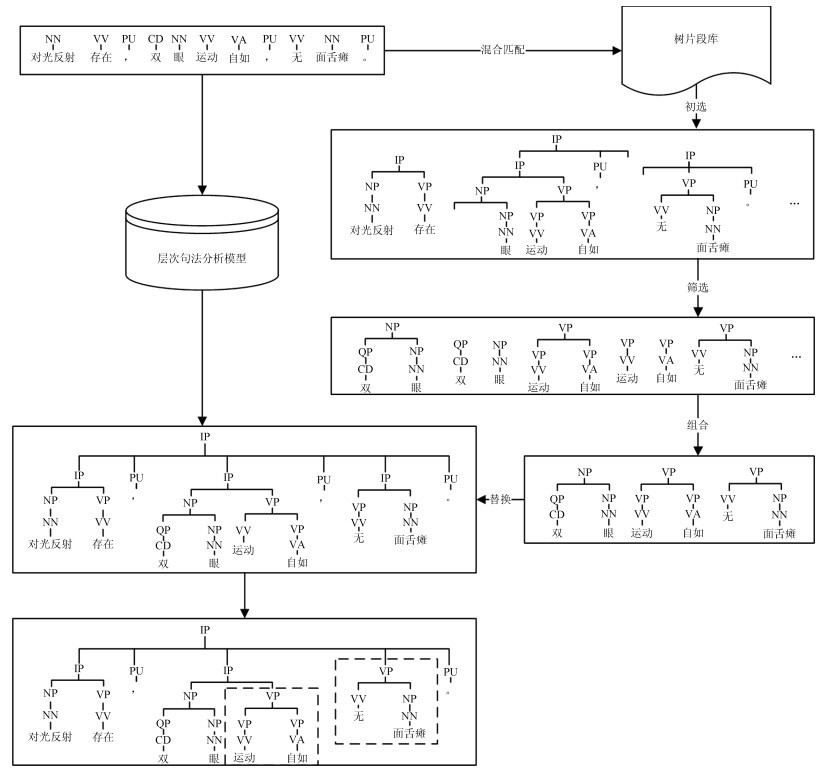
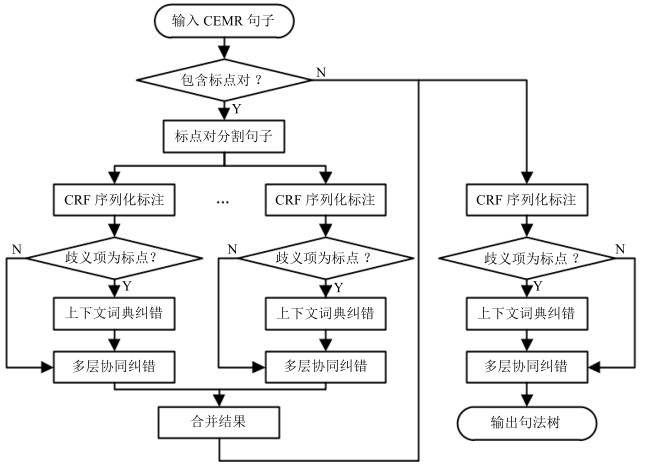
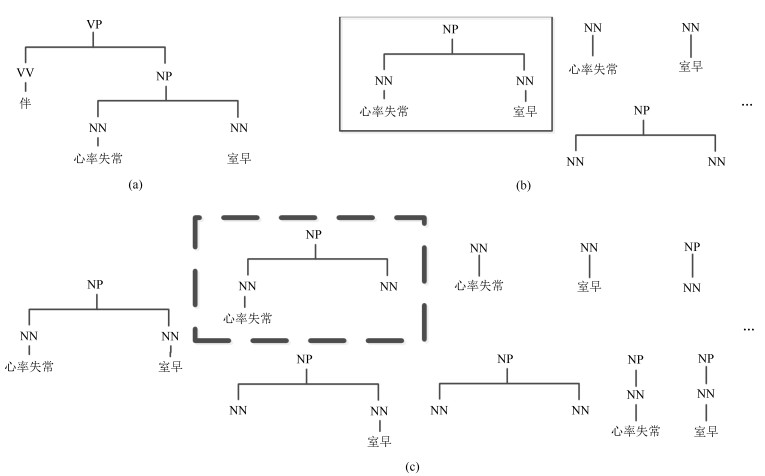
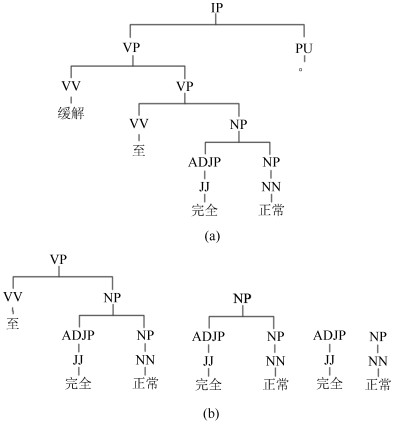
完全句法分析是自然语言处理(Natural language processing,NLP)中重要的结构化过程,由于中文电子病历(Chinese electronic medical record,CEMR)句法标注语料匮乏,目前还没有面向中文电子病历的完全句法分析研究.本文针对中文电子病历模式化强的子语言特征,首次以树片段形式化中文电子病历复用的模式,提出了面向数据句法分析(Data-oriented parsing,DOP)和层次句法分析融合模型.在树片段抽取阶段,提出效率更高的标准树片段和局部树片段抽取算法,分别解决了标准树片段的重复比对问题,以及二次树核(Quadratic tree kernel,QTK)的效率低下问题,获得了标准树片段集和局部树片段集.基于上述两个树片段集,提出词汇和词性混合匹配策略和最大化树片段组合算法改进面向数据句法分析模型,缓解了无效树片段带来的噪声.实验结果表明,该融合模型能够有效改善中文电子病历句法分析效果,基于少量标注语料F1值能够达到目前最高的80.87%,并且在跨科室句法分析上超过Stanford parser和Berkeley parser 2%以上.
完全句法分析是自然语言处理(Natural language processing,NLP)中重要的结构化过程,由于中文电子病历(Chinese electronic medical record,CEMR)句法标注语料匮乏,目前还没有面向中文电子病历的完全句法分析研究.本文针对中文电子病历模式化强的子语言特征,首次以树片段形式化中文电子病历复用的模式,提出了面向数据句法分析(Data-oriented parsing,DOP)和层次句法分析融合模型.在树片段抽取阶段,提出效率更高的标准树片段和局部树片段抽取算法,分别解决了标准树片段的重复比对问题,以及二次树核(Quadratic tree kernel,QTK)的效率低下问题,获得了标准树片段集和局部树片段集.基于上述两个树片段集,提出词汇和词性混合匹配策略和最大化树片段组合算法改进面向数据句法分析模型,缓解了无效树片段带来的噪声.实验结果表明,该融合模型能够有效改善中文电子病历句法分析效果,基于少量标注语料F1值能够达到目前最高的80.87%,并且在跨科室句法分析上超过Stanford parser和Berkeley parser 2%以上.

2019, 45(2): 289-304.
doi: 10.16383/j.aas.2018.c170359
摘要:
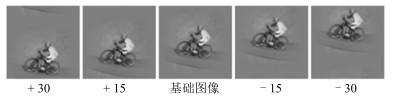
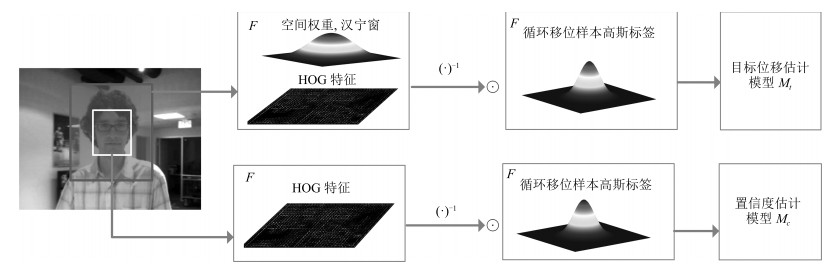
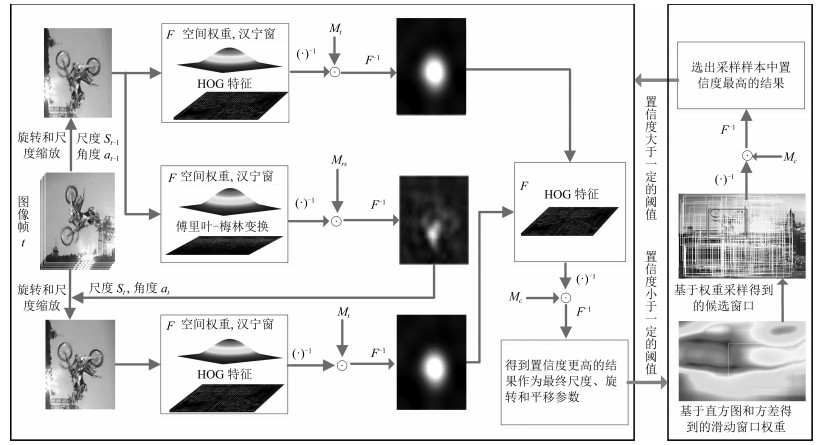
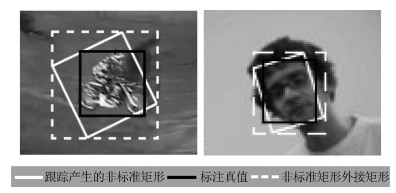
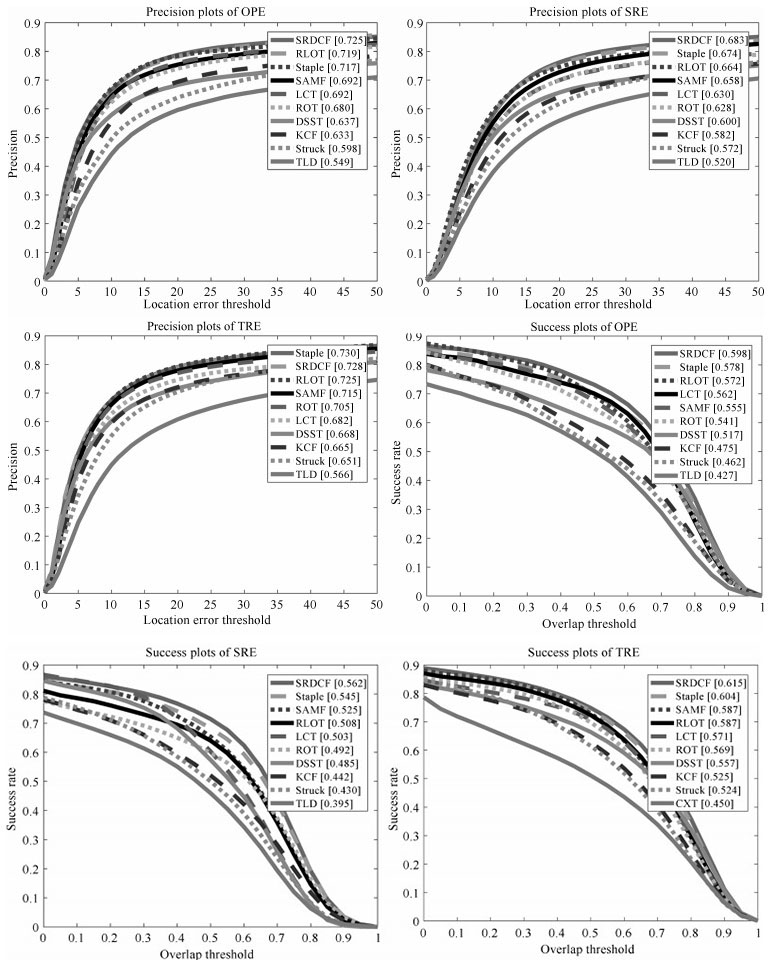
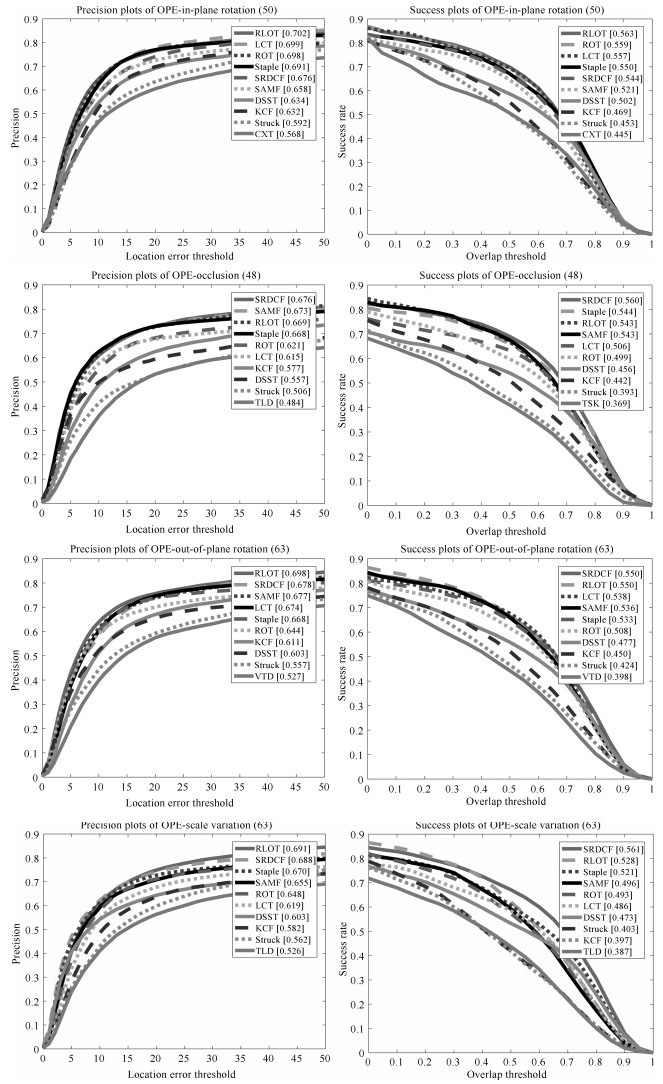
目标发生尺度和旋转变化会给长时间目标跟踪带来很大的挑战,针对该问题,本文提出了具有尺度和旋转适应性的鲁棒目标跟踪算法.首先针对跟踪过程中目标存在的尺度变化和旋转运动,提出一种基于傅里叶-梅林变换和核相关滤波的目标尺度和旋转参数估计方法.该方法能够实现连续空间的目标尺度和旋转参数估计,采用核相关滤波提高了估计的鲁棒性和准确性.然后针对长时间目标跟踪过程中,有时不可避免地会出现跟踪失败的情况(例如由于长时间半遮挡或全遮挡等),提出一种基于直方图和方差加权的目标搜索方法.当目标丢失时,通过提出的搜索方法能够快速从图像中确定目标可能存在的区域,使得跟踪算法具有从失败中恢复的能力.本文还训练了两个核相关滤波器用于估计跟踪结果的置信度和目标平移,通过专门的核相关滤波器能够使得估计的跟踪结果置信度更加准确和鲁棒,置信度的估计结果可用于激活基于直方图和方差加权的目标搜索模块,并判断搜索窗口中是否包含目标.本文在目标跟踪标准数据集(Online object tracking benchmark,OTB)上对提出的算法和目前主流的目标跟踪算法进行对比实验,验证了本文提出算法的有效性和优越性.
目标发生尺度和旋转变化会给长时间目标跟踪带来很大的挑战,针对该问题,本文提出了具有尺度和旋转适应性的鲁棒目标跟踪算法.首先针对跟踪过程中目标存在的尺度变化和旋转运动,提出一种基于傅里叶-梅林变换和核相关滤波的目标尺度和旋转参数估计方法.该方法能够实现连续空间的目标尺度和旋转参数估计,采用核相关滤波提高了估计的鲁棒性和准确性.然后针对长时间目标跟踪过程中,有时不可避免地会出现跟踪失败的情况(例如由于长时间半遮挡或全遮挡等),提出一种基于直方图和方差加权的目标搜索方法.当目标丢失时,通过提出的搜索方法能够快速从图像中确定目标可能存在的区域,使得跟踪算法具有从失败中恢复的能力.本文还训练了两个核相关滤波器用于估计跟踪结果的置信度和目标平移,通过专门的核相关滤波器能够使得估计的跟踪结果置信度更加准确和鲁棒,置信度的估计结果可用于激活基于直方图和方差加权的目标搜索模块,并判断搜索窗口中是否包含目标.本文在目标跟踪标准数据集(Online object tracking benchmark,OTB)上对提出的算法和目前主流的目标跟踪算法进行对比实验,验证了本文提出算法的有效性和优越性.


2019, 45(2): 305-314.
doi: 10.16383/j.aas.2018.c170521
摘要:
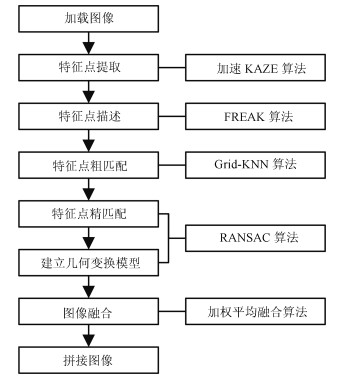
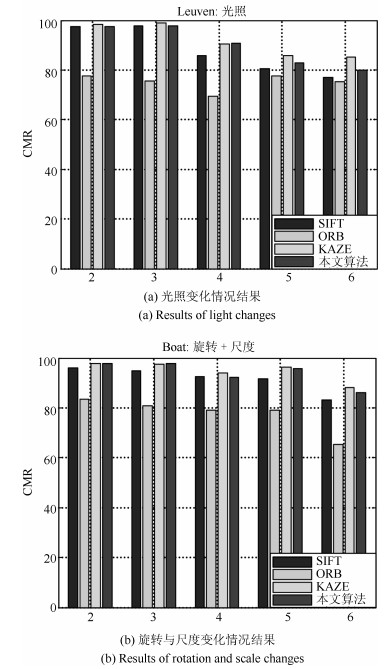
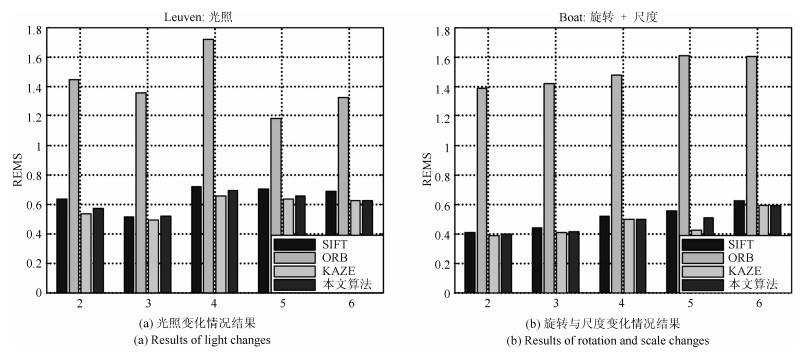
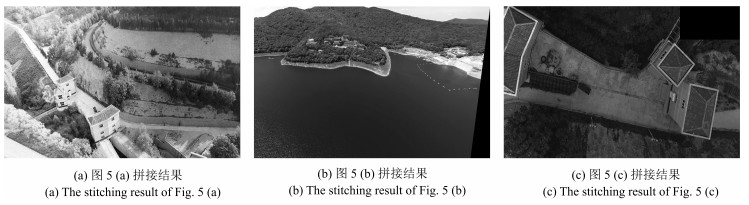
为了更好地解决航拍图像易受光照、旋转变化、尺度变化等影响,KAZE算法实时性较差以及基于K近邻的特征匹配算法耗时较长等问题,该文提出了一种基于改进KAZE的无人机航拍图像拼接算法.该方法首先利用加速的KAZE算法提取图像的特征点,采用二进制特征描述子FREAK(Fast retina keypoint)进行特征点描述,然后使用Grid-KNN算法进行特征点粗匹配,利用随机一致性算法对匹配的特征点进一步提纯并计算几何变换模型,最后采用加权平均算法对图像进行融合.实验结果表明,该文所提算法使图像在光照变化、旋转变化及尺度变化下具有较好的性能,且处理速度较KAZE算法与K近邻特征匹配算法有较大提升,是一种稳定、精确度高、拼接效果良好的无人机航拍图像拼接方法.
为了更好地解决航拍图像易受光照、旋转变化、尺度变化等影响,KAZE算法实时性较差以及基于K近邻的特征匹配算法耗时较长等问题,该文提出了一种基于改进KAZE的无人机航拍图像拼接算法.该方法首先利用加速的KAZE算法提取图像的特征点,采用二进制特征描述子FREAK(Fast retina keypoint)进行特征点描述,然后使用Grid-KNN算法进行特征点粗匹配,利用随机一致性算法对匹配的特征点进一步提纯并计算几何变换模型,最后采用加权平均算法对图像进行融合.实验结果表明,该文所提算法使图像在光照变化、旋转变化及尺度变化下具有较好的性能,且处理速度较KAZE算法与K近邻特征匹配算法有较大提升,是一种稳定、精确度高、拼接效果良好的无人机航拍图像拼接方法.


2019, 45(2): 315-324.
doi: 10.16383/j.aas.2017.c170159
摘要:
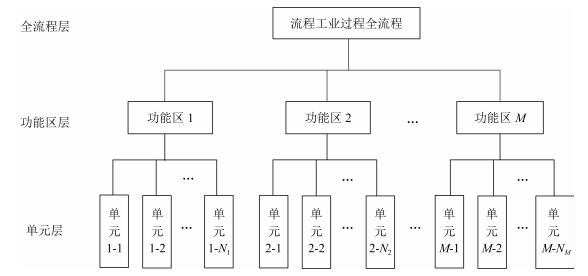
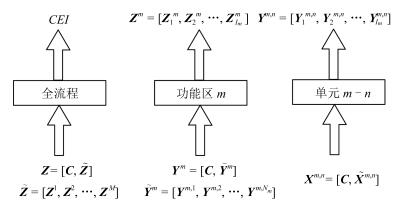
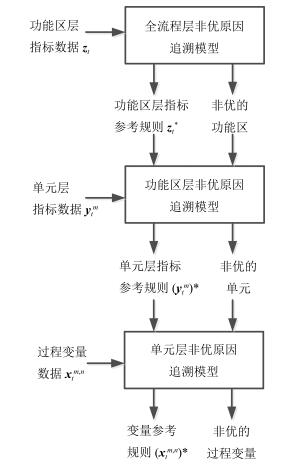
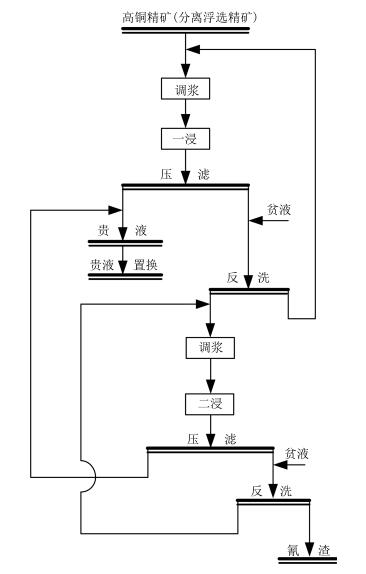
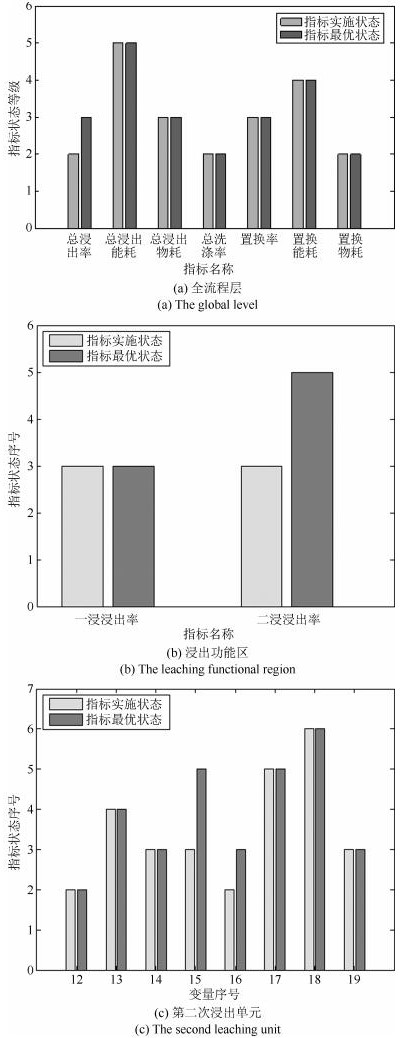
过程运行状态评价是指在安全生产的前提下,对过程运行性能优劣程度做出评判,并对非优运行状态追溯原因,以指导操作人员进行生产调整.针对含不确定性的流程工业过程运行状态评价问题,本文提出分层分块评价结构.同时,考虑到实际生产过程中大量存在的不确定性信息,采用粗糙集对每个子模型进行建模,建立过程变量、工艺指标与综合评价指标间的关系.最后,将所提方法应用于一个金湿法冶金过程中,验证所提方法有效性.
过程运行状态评价是指在安全生产的前提下,对过程运行性能优劣程度做出评判,并对非优运行状态追溯原因,以指导操作人员进行生产调整.针对含不确定性的流程工业过程运行状态评价问题,本文提出分层分块评价结构.同时,考虑到实际生产过程中大量存在的不确定性信息,采用粗糙集对每个子模型进行建模,建立过程变量、工艺指标与综合评价指标间的关系.最后,将所提方法应用于一个金湿法冶金过程中,验证所提方法有效性.


2019, 45(2): 325-333.
doi: 10.16383/j.aas.2018.c170216
摘要:
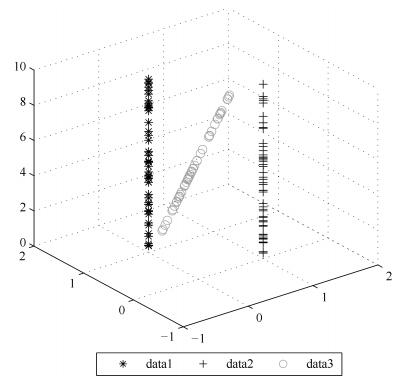
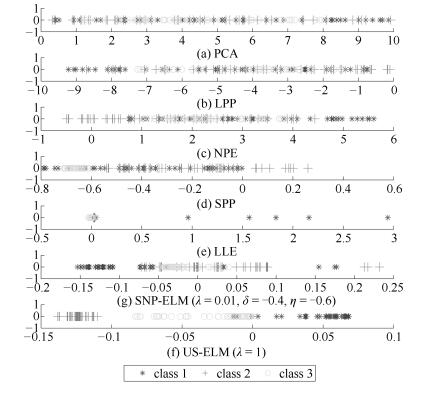
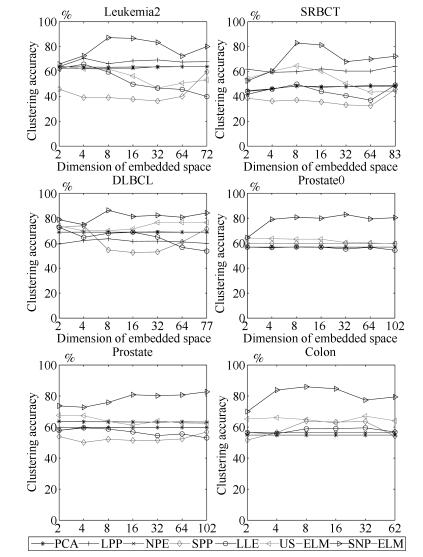
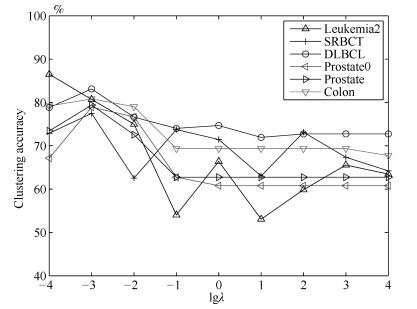
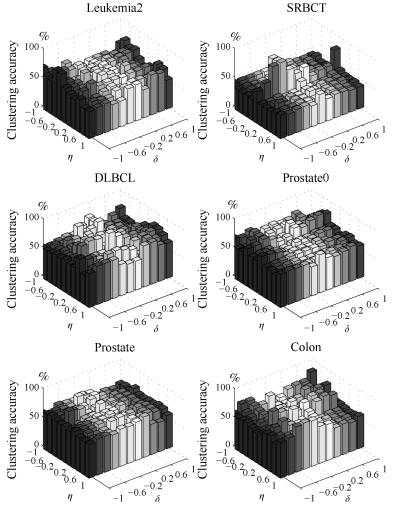
近邻与稀疏保持投影已被广泛应用于降维方法,通过优化得到满足近邻结构或稀疏结构的降维投影矩阵,然而这类方法多数只考虑单一结构特征.此外,多数非线性降维方法无法求出显式的映射函数,极大地限制了降维方法的应用.为克服这些问题,本文借鉴极限学习机的思想,提出面向聚类的基于稀疏和近邻保持的极限学习机降维算法(SNP-ELM).SNP-ELM算法是一种非线性无监督降维方法,在降维过程中同时考虑数据的稀疏结构与近邻结构.在人造数据、Wine数据和6个基因表达数据上进行实验,实验结果表明该算法优于其他降维方法.
近邻与稀疏保持投影已被广泛应用于降维方法,通过优化得到满足近邻结构或稀疏结构的降维投影矩阵,然而这类方法多数只考虑单一结构特征.此外,多数非线性降维方法无法求出显式的映射函数,极大地限制了降维方法的应用.为克服这些问题,本文借鉴极限学习机的思想,提出面向聚类的基于稀疏和近邻保持的极限学习机降维算法(SNP-ELM).SNP-ELM算法是一种非线性无监督降维方法,在降维过程中同时考虑数据的稀疏结构与近邻结构.在人造数据、Wine数据和6个基因表达数据上进行实验,实验结果表明该算法优于其他降维方法.

2019, 45(2): 334-348.
doi: 10.16383/j.aas.2018.c170393
摘要:
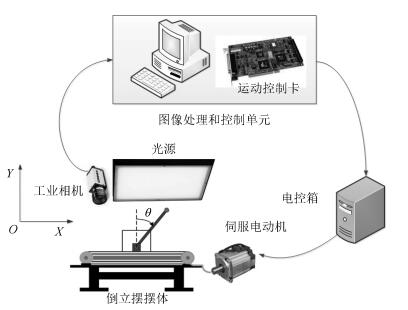
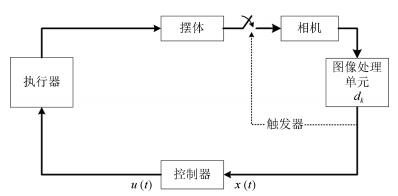
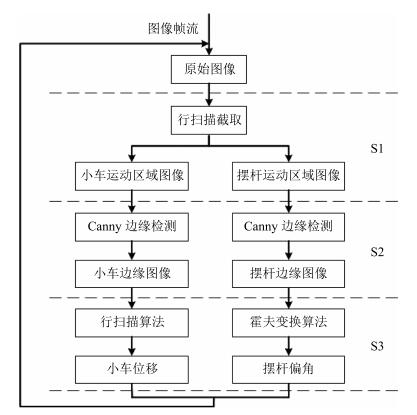
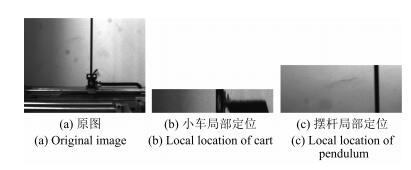
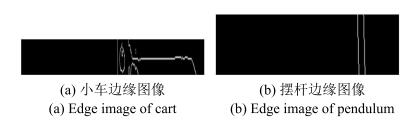
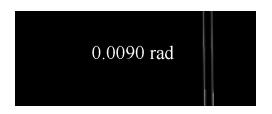
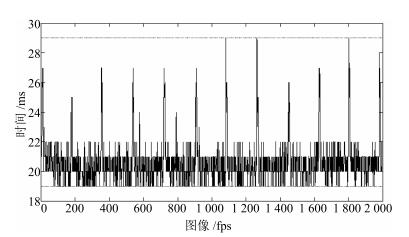
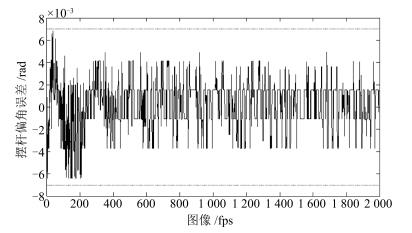
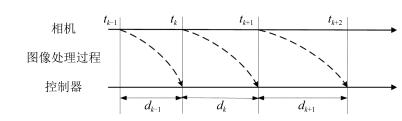
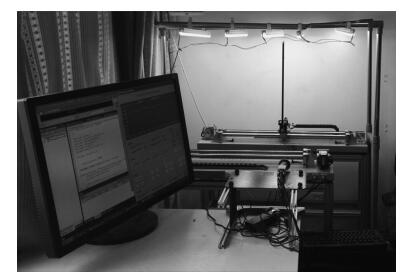
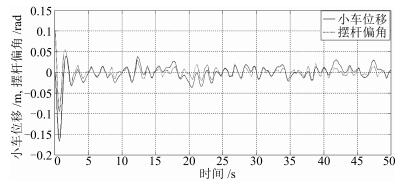
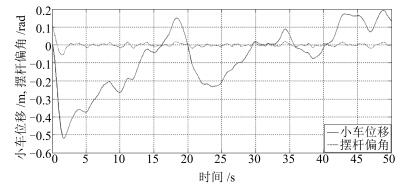
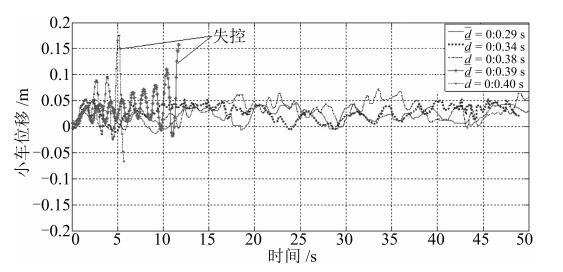
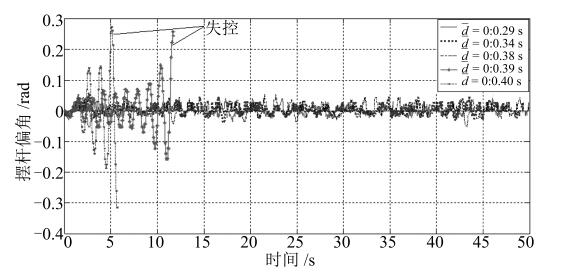
针对基于视觉传感的倒立摆实时控制系统中,通过每帧图像计算小车位移和摆杆偏角产生的时变计算时间和计算误差直接影响控制系统性能甚至导致系统失稳问题,不同于目前不考虑计算时间和计算误差或将计算时间视为定时滞进行研究倒立摆视觉实时控制方法,本文首先创新设计了新型的倒立摆视觉伺服控制实验平台,然后设计了一种基于事件触发机制的工业图像采集策略,提出了考虑小车和摆杆特征的小车位移和摆杆偏角计算方法,并统计分析了图像处理计算时间和计算误差特性;进一步建立了融合计算时间和计算误差的闭环控制系统模型,理论证明系统的稳定性并建立了反映计算时间与系统稳定性能之间关系,给出了系统对计算误差的H∞扰动抑制水平γ和控制器设计方法.最后,仿真和实时控制实验验证了所提方法可行且有效.
针对基于视觉传感的倒立摆实时控制系统中,通过每帧图像计算小车位移和摆杆偏角产生的时变计算时间和计算误差直接影响控制系统性能甚至导致系统失稳问题,不同于目前不考虑计算时间和计算误差或将计算时间视为定时滞进行研究倒立摆视觉实时控制方法,本文首先创新设计了新型的倒立摆视觉伺服控制实验平台,然后设计了一种基于事件触发机制的工业图像采集策略,提出了考虑小车和摆杆特征的小车位移和摆杆偏角计算方法,并统计分析了图像处理计算时间和计算误差特性;进一步建立了融合计算时间和计算误差的闭环控制系统模型,理论证明系统的稳定性并建立了反映计算时间与系统稳定性能之间关系,给出了系统对计算误差的H∞扰动抑制水平γ和控制器设计方法.最后,仿真和实时控制实验验证了所提方法可行且有效.






2019, 45(2): 349-359.
doi: 10.16383/j.aas.2018.c170371
摘要:
针对新生目标强度先验未知的扩展目标(Extended target,ET)联合跟踪与分类(Joint tracking and classification,JTC)问题,提出一种基于扩展目标概率假设密度(Extended target-probability hypothesis density,ET-PHD)滤波器的自适应联合跟踪与分类算法,并给出其高斯混合实现方法.算法利用量测信息生成新生目标强度,在滤波预测阶段对存活目标和新生目标分别按照其类别进行传播,再引入属性量测信息,用位置和属性的联合量测似然函数代替单目标位置似然函数,对预测后所有目标强度进行联合更新,之后按照类别进行高斯项的删减与合并,提取相应类别目标的状态集.仿真结果表明,提出的自适应算法改进了概率假设密度滤波器在扩展目标跟踪中的性能.
针对新生目标强度先验未知的扩展目标(Extended target,ET)联合跟踪与分类(Joint tracking and classification,JTC)问题,提出一种基于扩展目标概率假设密度(Extended target-probability hypothesis density,ET-PHD)滤波器的自适应联合跟踪与分类算法,并给出其高斯混合实现方法.算法利用量测信息生成新生目标强度,在滤波预测阶段对存活目标和新生目标分别按照其类别进行传播,再引入属性量测信息,用位置和属性的联合量测似然函数代替单目标位置似然函数,对预测后所有目标强度进行联合更新,之后按照类别进行高斯项的删减与合并,提取相应类别目标的状态集.仿真结果表明,提出的自适应算法改进了概率假设密度滤波器在扩展目标跟踪中的性能.
2019, 45(2): 360-373.
doi: 10.16383/j.aas.2017.c160758
摘要:
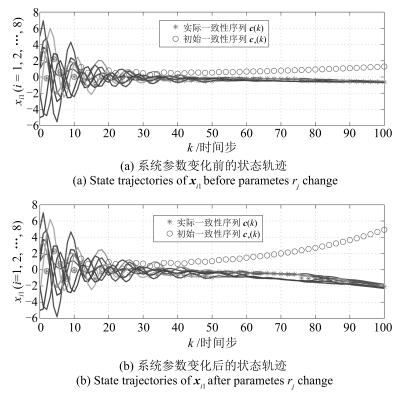
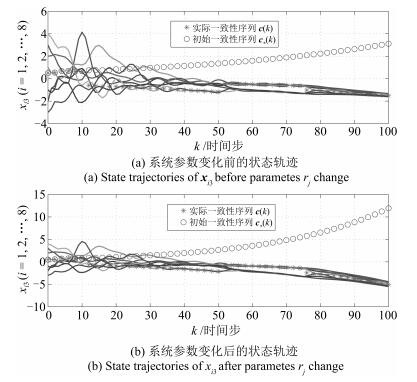
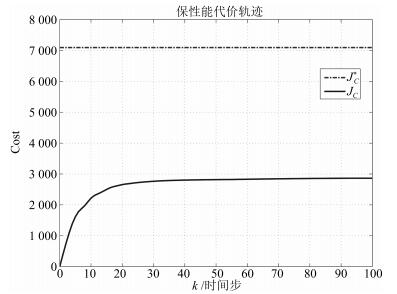
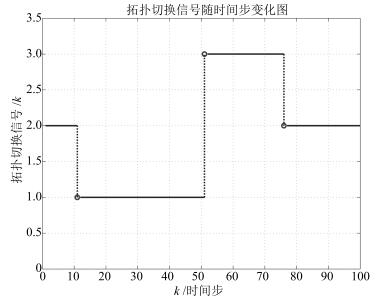
研究存在参数不确定性的高阶离散时间多智能体系统在时延和联合连通切换通信拓扑条件下的鲁棒保性能一致性问题,给出一种线性一致性协议的设计方法.1)引入高阶离散时间不确定多智能体系统的鲁棒保性能一致性问题,定义基于智能体邻居状态误差和控制输入的保性能函数;2)通过构造合适的Lyapunov函数并利用离散时间系统稳定性理论,推导出一个使高阶离散时间不确定多智能体系统在该条件下获得保性能一致性的线性矩阵不等式(Linear matrix inequality,LMI)充分条件,并给出相应的保性能上界;3)以一致性序列的形式给出参数不确定条件下的高阶离散时间多智能体系统的一致性收敛结果;4)数值仿真验证了本文理论的正确性和有效性.
研究存在参数不确定性的高阶离散时间多智能体系统在时延和联合连通切换通信拓扑条件下的鲁棒保性能一致性问题,给出一种线性一致性协议的设计方法.1)引入高阶离散时间不确定多智能体系统的鲁棒保性能一致性问题,定义基于智能体邻居状态误差和控制输入的保性能函数;2)通过构造合适的Lyapunov函数并利用离散时间系统稳定性理论,推导出一个使高阶离散时间不确定多智能体系统在该条件下获得保性能一致性的线性矩阵不等式(Linear matrix inequality,LMI)充分条件,并给出相应的保性能上界;3)以一致性序列的形式给出参数不确定条件下的高阶离散时间多智能体系统的一致性收敛结果;4)数值仿真验证了本文理论的正确性和有效性.

2019, 45(2): 374-387.
doi: 10.16383/j.aas.2018.c170243
摘要:
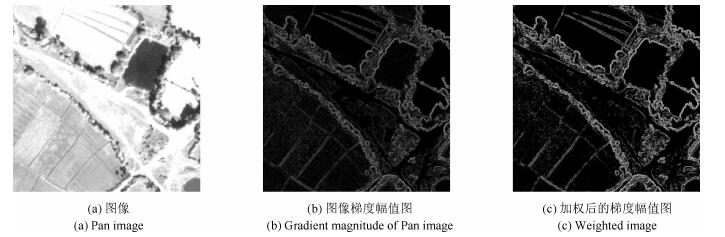
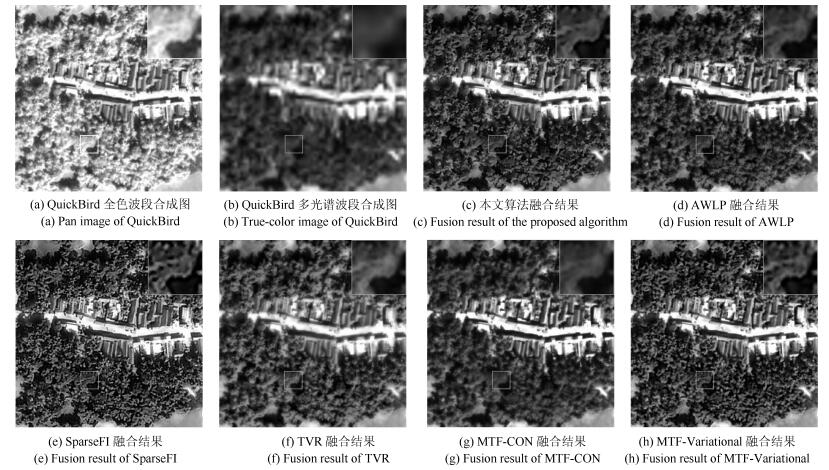
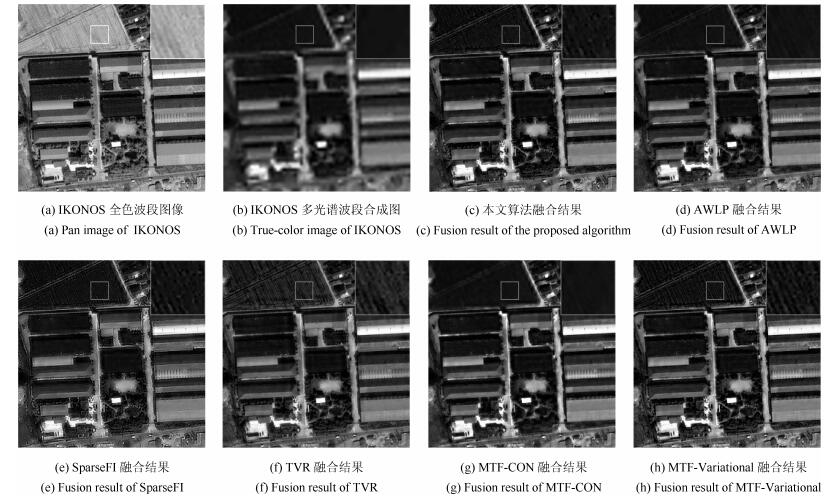
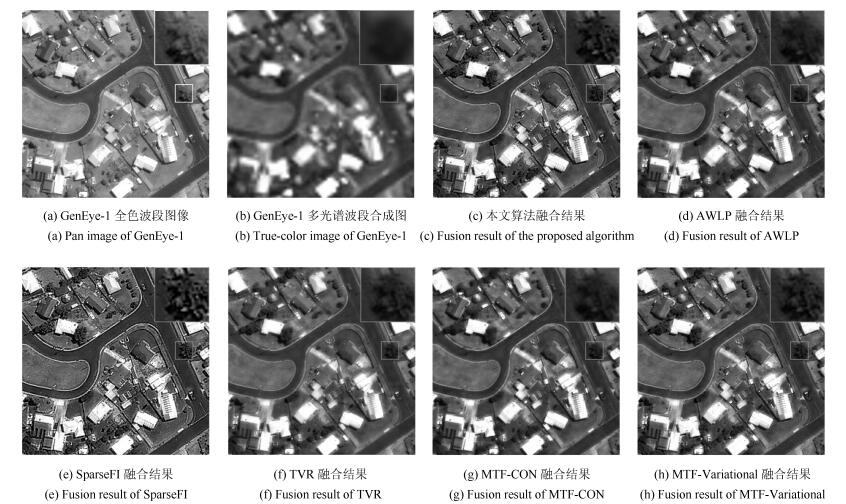
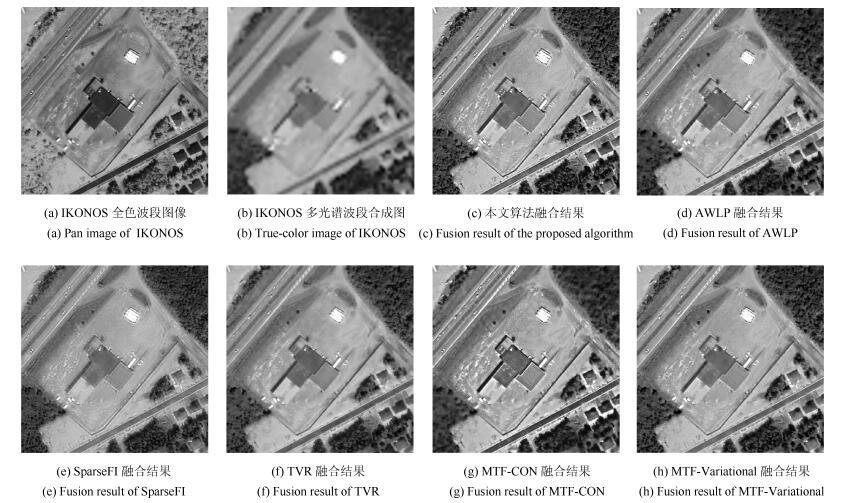
为生成兼具高光谱质量与高空间质量的融合图像,本文提出了一种新的Pan-sharpening变分融合模型.通过拟合退化后的全色(Panchromatic,Pan)波段图像与低分辨率多光谱(Multispectral,MS)波段图像间的线性关系得到各波段MS图像的权重系数,计算从Pan图像抽取的空间细节;基于全色波段图像的梯度定义加权函数,增强了图像的强梯度边缘并对因噪声而引入的虚假边缘进行了抑制,有效地保持了全色波段图像中目标的几何结构;基于MS波段传感器的调制传输函数定义低通滤波器,自适应地限制注入空间细节的数量,显著降低了融合MS图像的光谱失真;针对Pan-sharpening模型的不适定性问题,引入L1正则化能量项,保证了数值解的稳定性.采用Split Bregman数值方法求解能量泛函的最优解,提高了算法的计算效率.QuickBird、IKONOS和GeoEye-1数据集上的实验结果表明,模型的综合融合性能优于MTF-CON、AWLP、SparseFI、TVR和MTF-Variational等算法.
为生成兼具高光谱质量与高空间质量的融合图像,本文提出了一种新的Pan-sharpening变分融合模型.通过拟合退化后的全色(Panchromatic,Pan)波段图像与低分辨率多光谱(Multispectral,MS)波段图像间的线性关系得到各波段MS图像的权重系数,计算从Pan图像抽取的空间细节;基于全色波段图像的梯度定义加权函数,增强了图像的强梯度边缘并对因噪声而引入的虚假边缘进行了抑制,有效地保持了全色波段图像中目标的几何结构;基于MS波段传感器的调制传输函数定义低通滤波器,自适应地限制注入空间细节的数量,显著降低了融合MS图像的光谱失真;针对Pan-sharpening模型的不适定性问题,引入L1正则化能量项,保证了数值解的稳定性.采用Split Bregman数值方法求解能量泛函的最优解,提高了算法的计算效率.QuickBird、IKONOS和GeoEye-1数据集上的实验结果表明,模型的综合融合性能优于MTF-CON、AWLP、SparseFI、TVR和MTF-Variational等算法.



2019, 45(2): 388-397.
doi: 10.16383/j.aas.c150332
摘要:
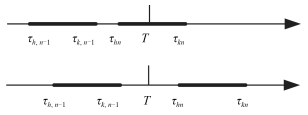
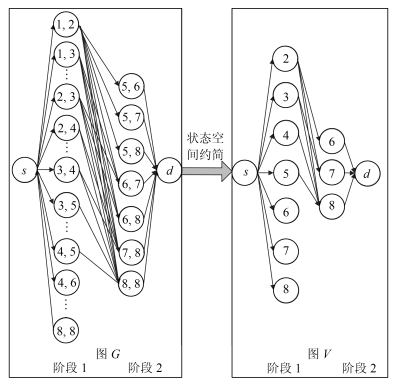
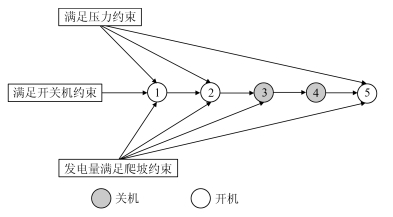
油井间抽批调度问题是确定未来给定计划期内油田井场间抽工作方式的油井各时间段的启停状态及采油量,在满足采油需求的情况下,考虑油井底部压力变化特征对油井开启的影响以及油井最小开关机时间和爬坡约束等生产工艺要求,使总的油井采油运行成本最小.针对油井数量多而导致大规模常规数学规划模型难以求解的困难,建立了基于批的混合整数规划模型.根据模型特点设计了基于变量分离的拉格朗日松弛算法(Lagrangian relaxation,LR)进行求解.针对常规动态规划方法求解分解后的带有爬坡约束的单机组子问题效率低的缺点,提出了用特征点代表同一阶段具有相同性质节点群的状态空间约简策略,使动态规划搜索节点的复杂度从O(n4)降到O(n2),显著提高了算法的搜索效率.通过大量随机产生的数值实验表明,提出的基于变量分离的LR算法,小规模问题与CPLEX获得的最优解接近,中大规模问题能够在合理的计算时间内获得高质量的解.
油井间抽批调度问题是确定未来给定计划期内油田井场间抽工作方式的油井各时间段的启停状态及采油量,在满足采油需求的情况下,考虑油井底部压力变化特征对油井开启的影响以及油井最小开关机时间和爬坡约束等生产工艺要求,使总的油井采油运行成本最小.针对油井数量多而导致大规模常规数学规划模型难以求解的困难,建立了基于批的混合整数规划模型.根据模型特点设计了基于变量分离的拉格朗日松弛算法(Lagrangian relaxation,LR)进行求解.针对常规动态规划方法求解分解后的带有爬坡约束的单机组子问题效率低的缺点,提出了用特征点代表同一阶段具有相同性质节点群的状态空间约简策略,使动态规划搜索节点的复杂度从O(n4)降到O(n2),显著提高了算法的搜索效率.通过大量随机产生的数值实验表明,提出的基于变量分离的LR算法,小规模问题与CPLEX获得的最优解接近,中大规模问题能够在合理的计算时间内获得高质量的解.

2019, 45(2): 398-406.
doi: 10.16383/j.aas.2018.c170289
摘要:
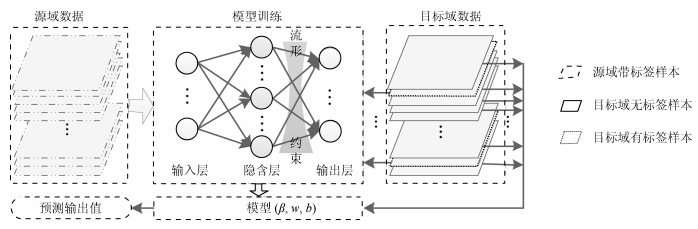
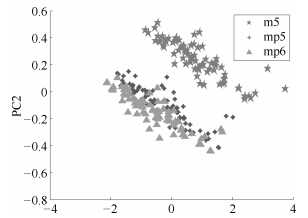
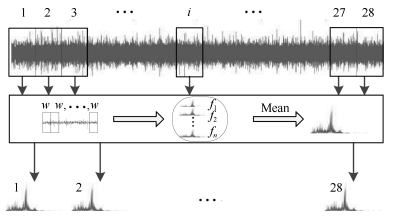
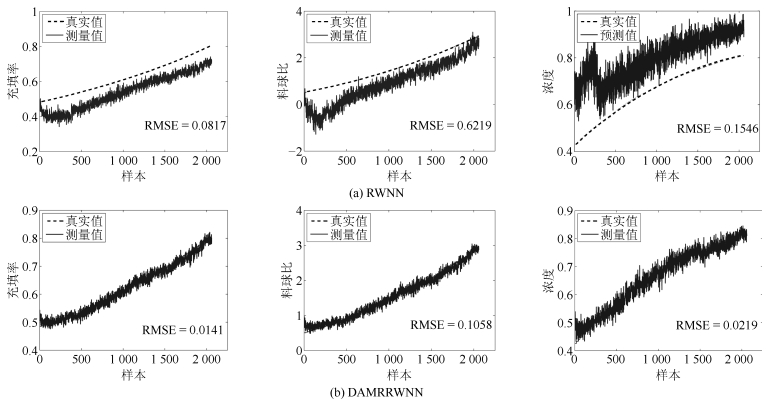
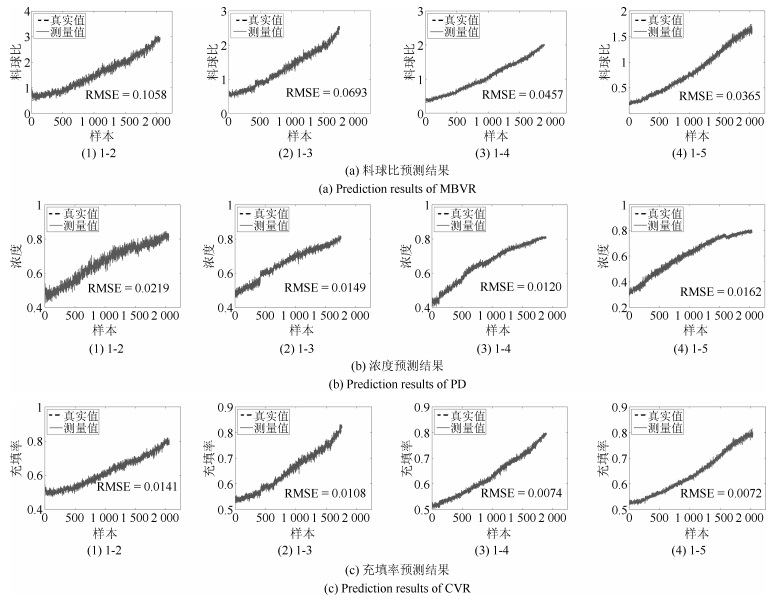
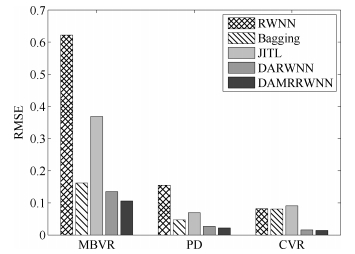
针对湿式球磨机多工况运行过程中标签样本难以获取和工况改变导致的原测量模型失准问题,本文引入域适应随机权神经网络(Domain adaptive random weight neural network,DARWNN),实现待测工况中少量标签样本与原工况样本共同进行迁移学习.DARWNN网络解决了不同工况间难以共同进行机器学习的问题,但其只考虑经验风险,而未考虑结构风险,从而泛化性能较差,预测精度较低.在此基础上,本文引入流形正则化,并构建基于流形正则化的域适应随机权神经网络(Domain adaptive manifold regularization random weight neural network,DAMRRWNN),以保持数据几何结构,提高相应模型性能.实验结果表明,所提方法可以有效提高DARWNN的学习精度,解决多工况情况下湿式球磨机负荷参数软测量问题.
针对湿式球磨机多工况运行过程中标签样本难以获取和工况改变导致的原测量模型失准问题,本文引入域适应随机权神经网络(Domain adaptive random weight neural network,DARWNN),实现待测工况中少量标签样本与原工况样本共同进行迁移学习.DARWNN网络解决了不同工况间难以共同进行机器学习的问题,但其只考虑经验风险,而未考虑结构风险,从而泛化性能较差,预测精度较低.在此基础上,本文引入流形正则化,并构建基于流形正则化的域适应随机权神经网络(Domain adaptive manifold regularization random weight neural network,DAMRRWNN),以保持数据几何结构,提高相应模型性能.实验结果表明,所提方法可以有效提高DARWNN的学习精度,解决多工况情况下湿式球磨机负荷参数软测量问题.




2019, 45(2): 407-419.
doi: 10.16383/j.aas.c170205
摘要:
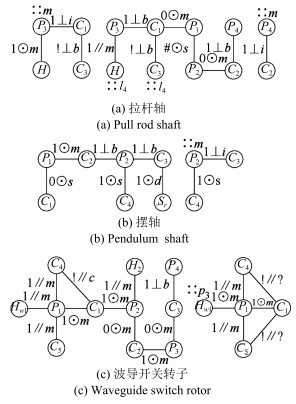
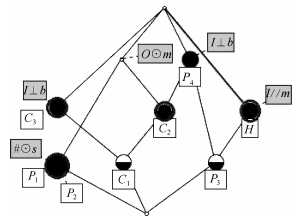
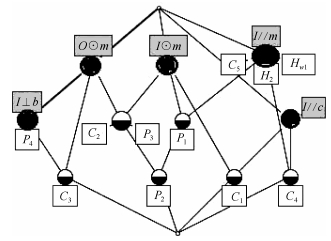
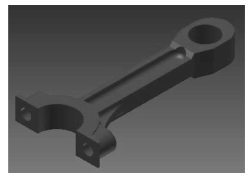
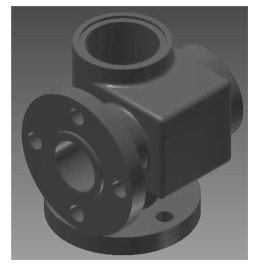
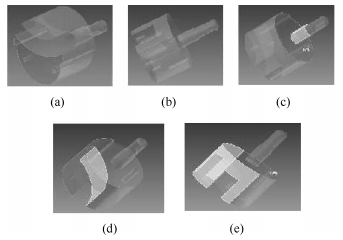
针对影响概念格应用的重要问题—即使是一个小规模数据集也会产生大量的形式概念,文中提出了可以满足关系覆盖的用对象(属性)概念分解形式背景对应的布尔矩阵的新方法.用这种方法原对象属性间的二元关系可以用数量在对象(属性)概念个数以内的概念表达出来,成为概念格因子.文中给出了概念格因子生成的基本原理及其算法.通过分析三维CAD零件模型功能表面间的关系构建零件工程图结构模型,并将其映射为形式背景,从而完成概念格因子到零件关键结构的应用.最后,实例演示了概念格因子在基于零件工程图结构模型的零件CAD模型检索中的运用.
针对影响概念格应用的重要问题—即使是一个小规模数据集也会产生大量的形式概念,文中提出了可以满足关系覆盖的用对象(属性)概念分解形式背景对应的布尔矩阵的新方法.用这种方法原对象属性间的二元关系可以用数量在对象(属性)概念个数以内的概念表达出来,成为概念格因子.文中给出了概念格因子生成的基本原理及其算法.通过分析三维CAD零件模型功能表面间的关系构建零件工程图结构模型,并将其映射为形式背景,从而完成概念格因子到零件关键结构的应用.最后,实例演示了概念格因子在基于零件工程图结构模型的零件CAD模型检索中的运用.


2019, 45(2): 420-426.
doi: 10.16383/j.aas.2018.c170206
摘要:
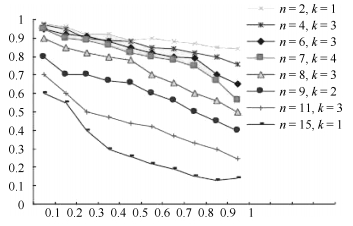
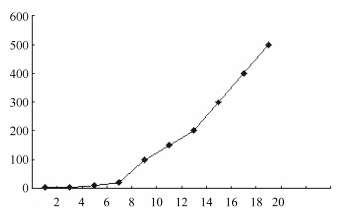
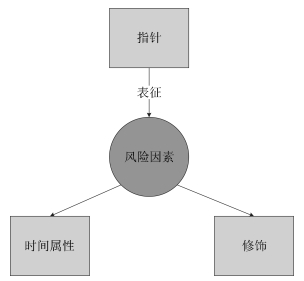
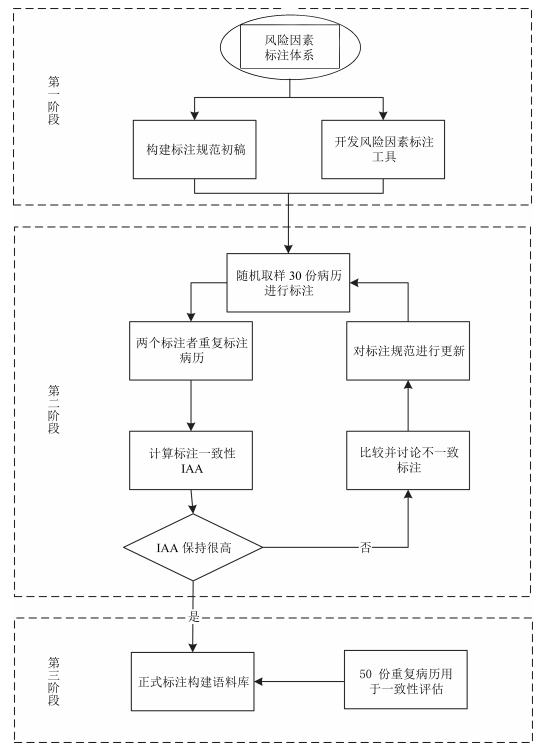
本文讨论了从中文电子病历中标注心血管疾病风险因素及其相关信息的问题,提出了适应中文电子病历内容特点的心血管疾病风险因素标注体系,构建了中文健康信息处理领域首份关于心血管疾病风险因素的标注语料库.
本文讨论了从中文电子病历中标注心血管疾病风险因素及其相关信息的问题,提出了适应中文电子病历内容特点的心血管疾病风险因素标注体系,构建了中文健康信息处理领域首份关于心血管疾病风险因素的标注语料库.
2019, 45(2): 427-433.
doi: 10.16383/j.aas.2018.c170343
摘要:
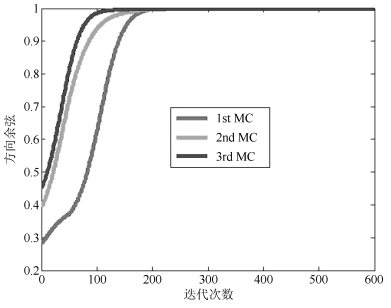
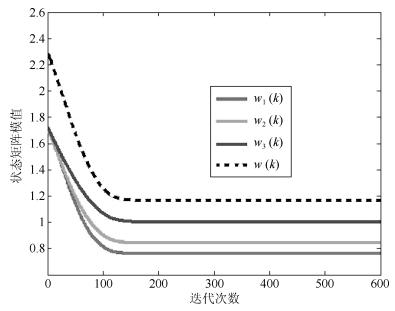
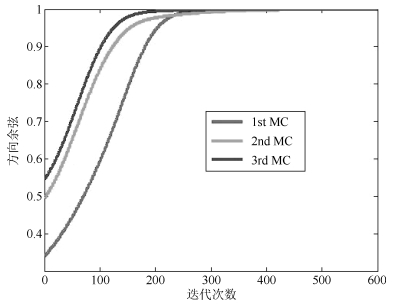
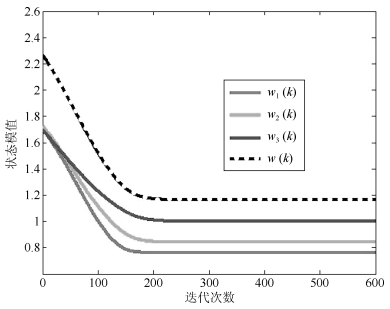
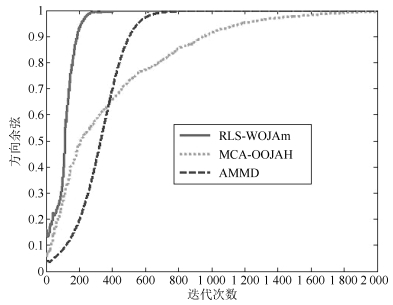
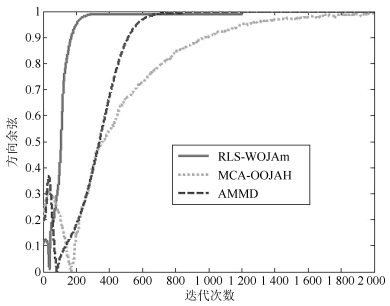
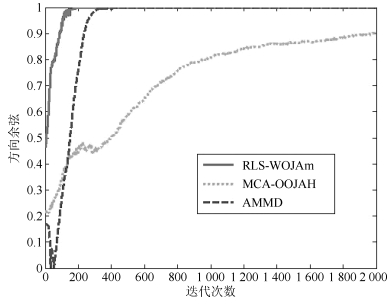
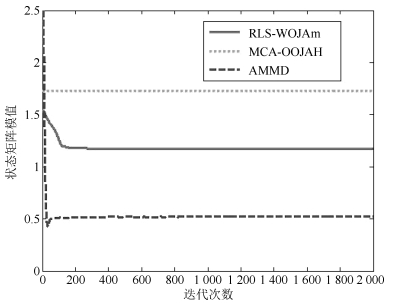
次成分分析是信号处理领域内一项重要的分析工具.目前,多维次成分并行提取算法数量稀少,而且现有的算法在应用时还存在很多限制条件.针对上述问题,在分析研究OJAm次子空间跟踪算法的基础上,采用加权矩阵法提出了一种多维次成分提取算法,并采用递归最小二乘法对所提算法进行了简化,最后采用李雅普诺夫函数法确定了所提算法的全局收敛域.相比现有算法,所提算法对信号的特征值大小没有要求,也不需要在迭代过程中进行模值归一化操作,同时算法具有较低的计算复杂度.仿真实验表明:所提算法能够并行提取多维次成分,而且收敛速度要优于现有同类型算法.
次成分分析是信号处理领域内一项重要的分析工具.目前,多维次成分并行提取算法数量稀少,而且现有的算法在应用时还存在很多限制条件.针对上述问题,在分析研究OJAm次子空间跟踪算法的基础上,采用加权矩阵法提出了一种多维次成分提取算法,并采用递归最小二乘法对所提算法进行了简化,最后采用李雅普诺夫函数法确定了所提算法的全局收敛域.相比现有算法,所提算法对信号的特征值大小没有要求,也不需要在迭代过程中进行模值归一化操作,同时算法具有较低的计算复杂度.仿真实验表明:所提算法能够并行提取多维次成分,而且收敛速度要优于现有同类型算法.
2019, 45(2): 434-444.
doi: 10.16383/j.aas.2017.c160779
摘要:
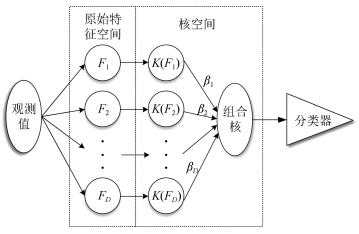
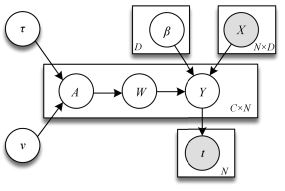
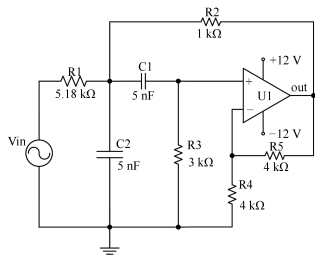
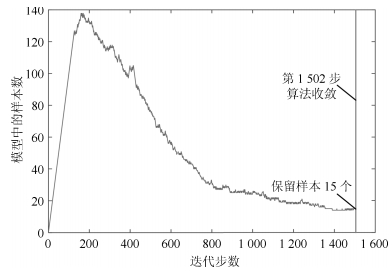
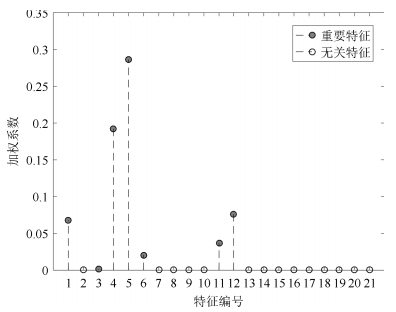
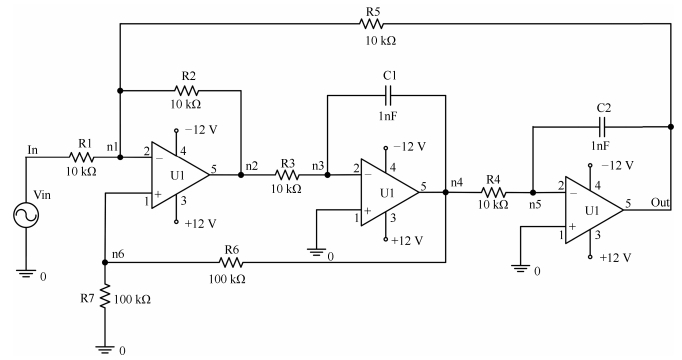
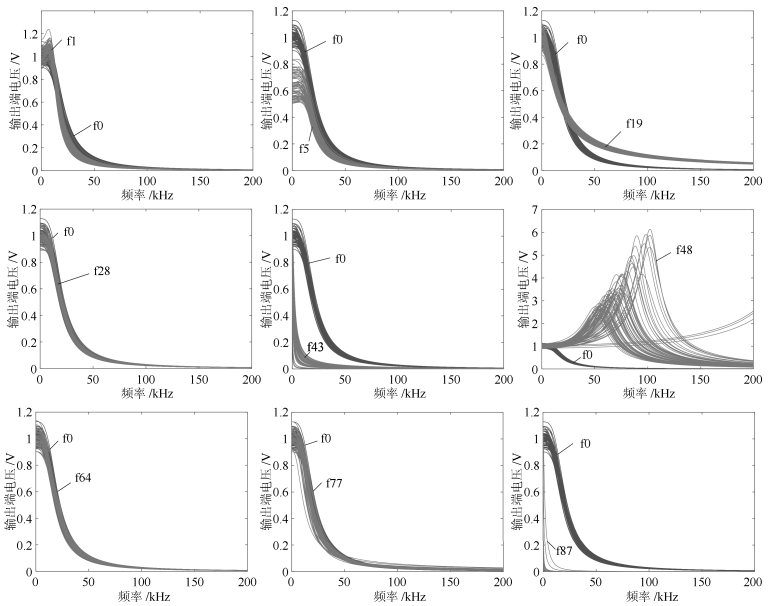
针对模拟电路实际存在的多类故障问题,本文提出一种基于多核多分类相关向量机(Multi-kernel learning multiclass relevance vector machine,MKL-mRVM)的模拟电路故障诊断方法.所提方法能够在故障数据所在的原始特征空间上建立多个非线性核,在构建分类器的同时实现故障特征的约简;同时,基于贝叶斯框架的分类模型还能够给出诊断结果的后验概率.通过两个电路的诊断实验证明了所提方法的优越性和实用性.
针对模拟电路实际存在的多类故障问题,本文提出一种基于多核多分类相关向量机(Multi-kernel learning multiclass relevance vector machine,MKL-mRVM)的模拟电路故障诊断方法.所提方法能够在故障数据所在的原始特征空间上建立多个非线性核,在构建分类器的同时实现故障特征的约简;同时,基于贝叶斯框架的分类模型还能够给出诊断结果的后验概率.通过两个电路的诊断实验证明了所提方法的优越性和实用性.