2017年 第43卷 第3期
2017, 43(3): 321-332.
doi: 10.16383/j.aas.2017.y000003
摘要:
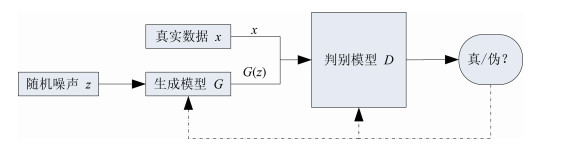
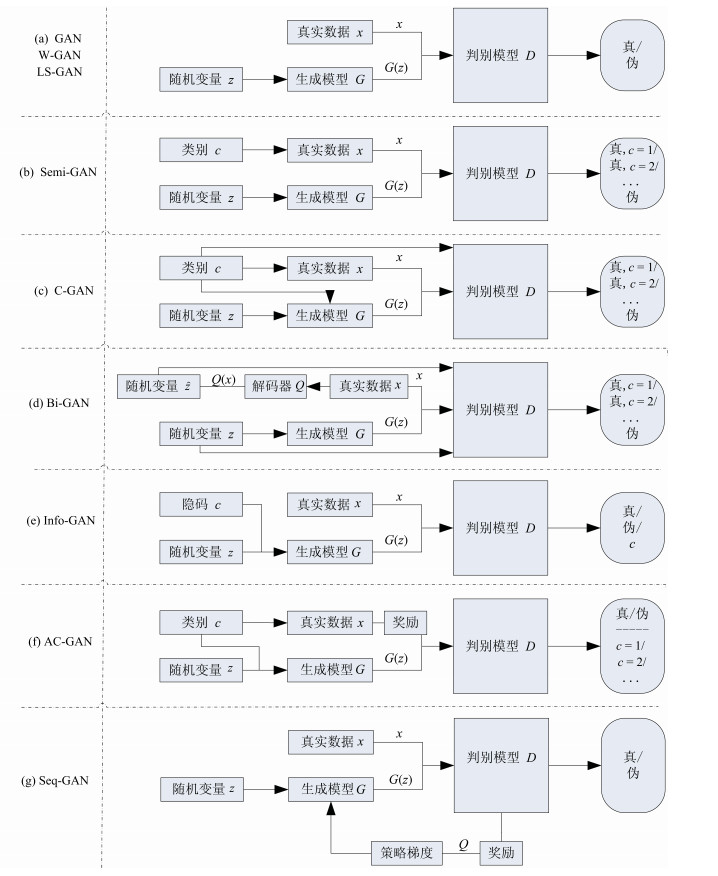
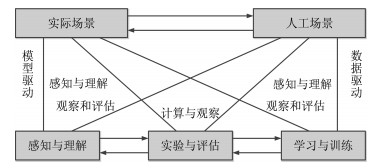
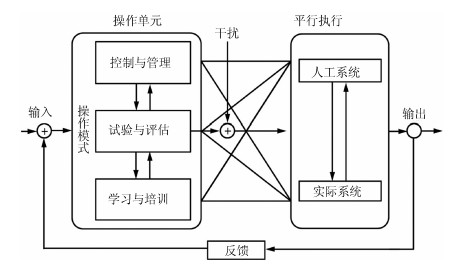
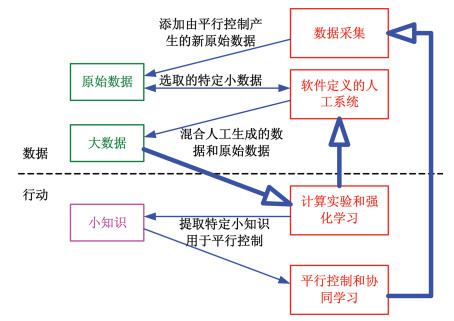
生成式对抗网络GAN(Generative adversarial networks)目前已经成为人工智能学界一个热门的研究方向.GAN的基本思想源自博弈论的二人零和博弈,由一个生成器和一个判别器构成,通过对抗学习的方式来训练.目的是估测数据样本的潜在分布并生成新的数据样本.在图像和视觉计算、语音和语言处理、信息安全、棋类比赛等领域,GAN正在被广泛研究,具有巨大的应用前景.本文概括了GAN的研究进展,并进行展望.在总结了GAN的背景、理论与实现模型、应用领域、优缺点及发展趋势之后,本文还讨论了GAN与平行智能的关系,认为GAN可以深化平行系统的虚实互动、交互一体的理念,特别是计算实验的思想,为ACP(Artificial societies,computational experiments,and parallel execution)理论提供了十分具体和丰富的算法支持.
生成式对抗网络GAN(Generative adversarial networks)目前已经成为人工智能学界一个热门的研究方向.GAN的基本思想源自博弈论的二人零和博弈,由一个生成器和一个判别器构成,通过对抗学习的方式来训练.目的是估测数据样本的潜在分布并生成新的数据样本.在图像和视觉计算、语音和语言处理、信息安全、棋类比赛等领域,GAN正在被广泛研究,具有巨大的应用前景.本文概括了GAN的研究进展,并进行展望.在总结了GAN的背景、理论与实现模型、应用领域、优缺点及发展趋势之后,本文还讨论了GAN与平行智能的关系,认为GAN可以深化平行系统的虚实互动、交互一体的理念,特别是计算实验的思想,为ACP(Artificial societies,computational experiments,and parallel execution)理论提供了十分具体和丰富的算法支持.


2017, 43(3): 333-348.
doi: 10.16383/j.aas.2017.c160398
摘要:
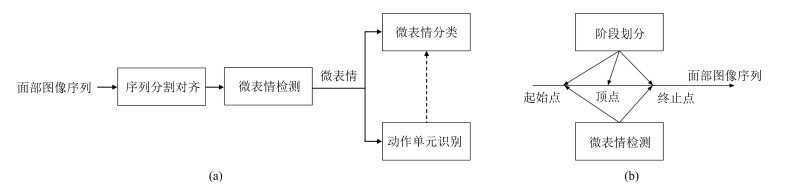
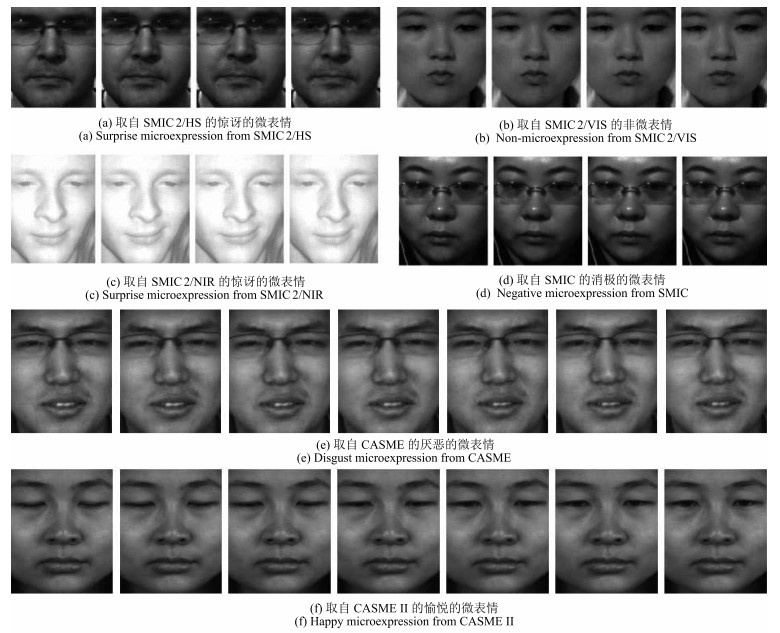
人脸表情是人际交往的重要渠道,识别人脸表情可促进对人心理状态和情感的理解.不同于常规的人脸表情,微表情是一种特殊的面部微小动作,可以作为判断人主观情绪的重要依据,在公共安防和心理治疗领域有广泛的应用价值.由于微表情具有动作幅度小、持续时间短的特点,对微表情的人工识别需要专业的培训,且识别正确率较低.近年来不少研究人员开始利用计算机视觉技术自动识别微表情,极大地提高了微表情的应用可行性.本文综述人脸微表情识别的定义和研究现状,总结微表情识别中的一些关键技术,探讨潜在的问题和可能的研究方向.
人脸表情是人际交往的重要渠道,识别人脸表情可促进对人心理状态和情感的理解.不同于常规的人脸表情,微表情是一种特殊的面部微小动作,可以作为判断人主观情绪的重要依据,在公共安防和心理治疗领域有广泛的应用价值.由于微表情具有动作幅度小、持续时间短的特点,对微表情的人工识别需要专业的培训,且识别正确率较低.近年来不少研究人员开始利用计算机视觉技术自动识别微表情,极大地提高了微表情的应用可行性.本文综述人脸微表情识别的定义和研究现状,总结微表情识别中的一些关键技术,探讨潜在的问题和可能的研究方向.


2017, 43(3): 349-365.
doi: 10.16383/j.aas.2017.c160427
摘要:
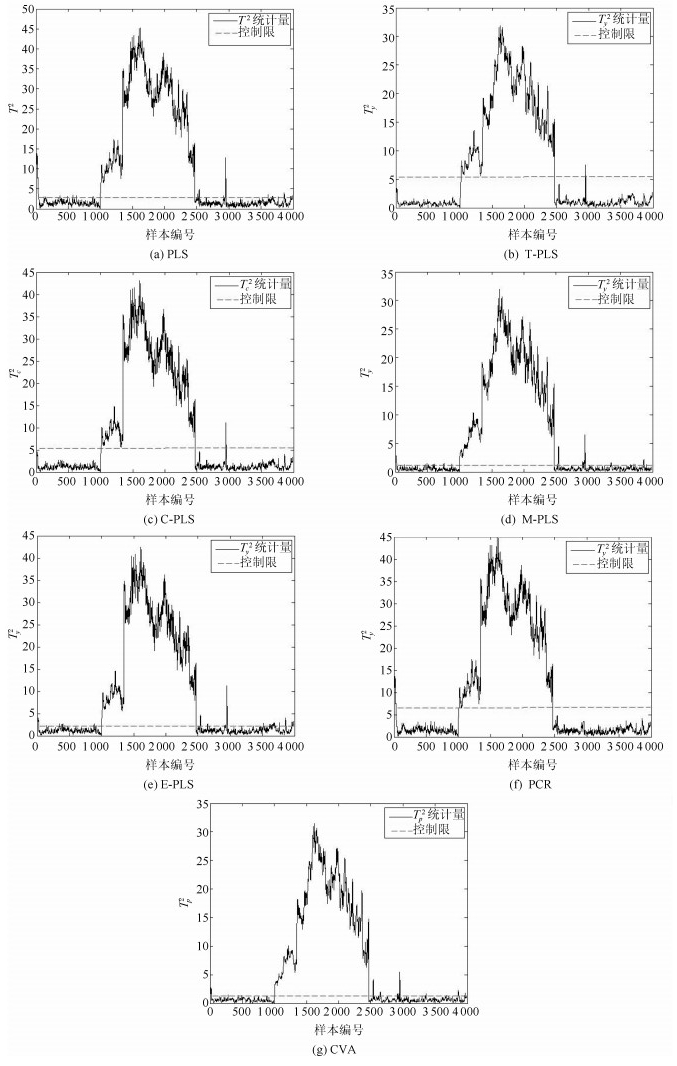
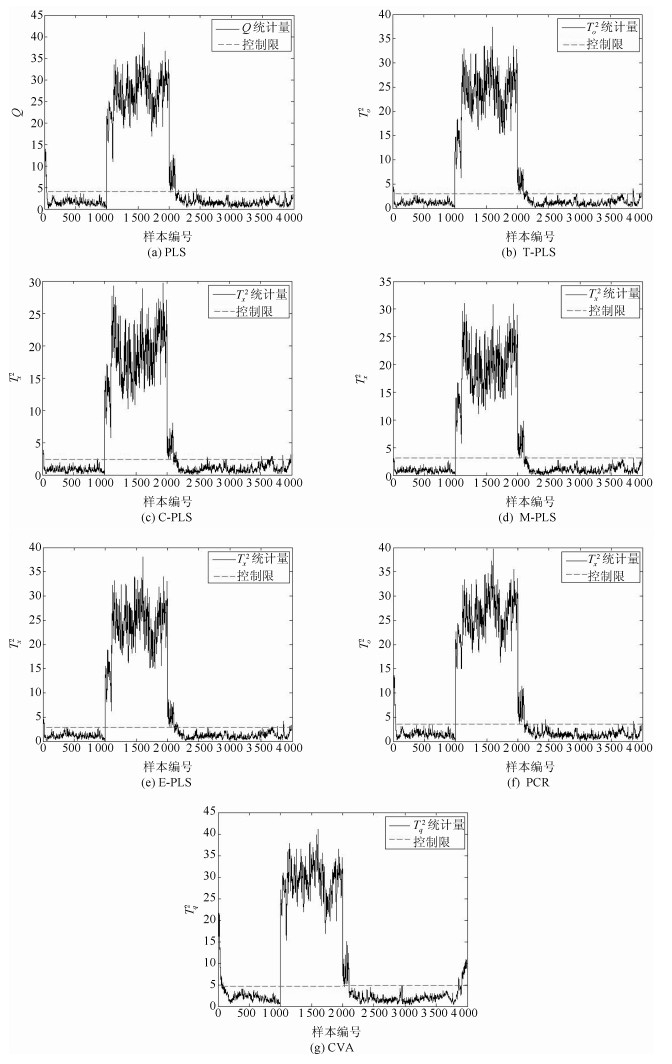
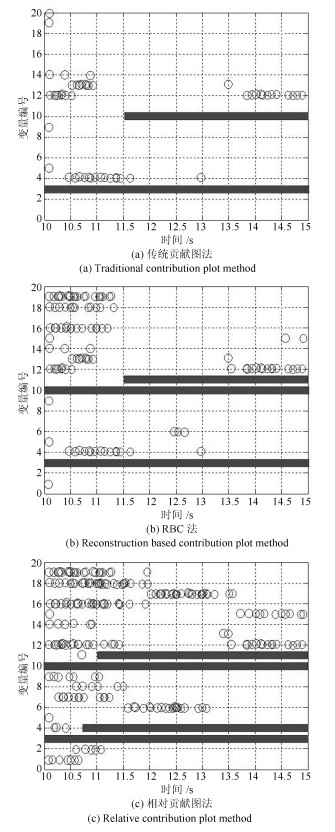
质量相关的故障检测与诊断技术是保证安全生产及获得可靠产品质量的有效手段,是当前国际过程控制领域的研究热点.首先,梳理了质量相关的故障检测技术中典型方法的基本思想和改进过程;其次,概述了质量相关的故障诊断技术中常用的贡献图法及其相关改进方法之间的联系,并通过带钢热连轧过程(Hot strip mill process,HSMP)案例比较了各种典型方法在质量相关的故障检测与诊断性能上的异同;最后,面向复杂工业过程运行数据的主要特性,评析了质量相关的故障检测与诊断方法的研究现状,并指出了该研究领域亟需解决的问题和未来的发展方向.
质量相关的故障检测与诊断技术是保证安全生产及获得可靠产品质量的有效手段,是当前国际过程控制领域的研究热点.首先,梳理了质量相关的故障检测技术中典型方法的基本思想和改进过程;其次,概述了质量相关的故障诊断技术中常用的贡献图法及其相关改进方法之间的联系,并通过带钢热连轧过程(Hot strip mill process,HSMP)案例比较了各种典型方法在质量相关的故障检测与诊断性能上的异同;最后,面向复杂工业过程运行数据的主要特性,评析了质量相关的故障检测与诊断方法的研究现状,并指出了该研究领域亟需解决的问题和未来的发展方向.

2017, 43(3): 366-375.
doi: 10.16383/j.aas.2017.c160272
摘要:
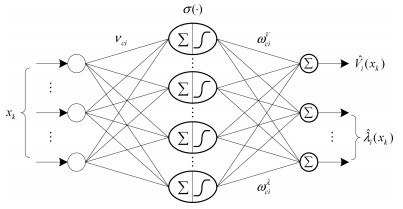
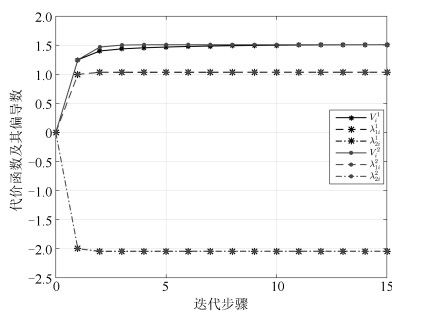
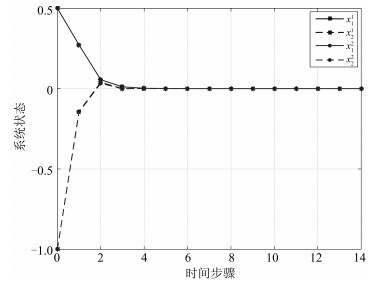
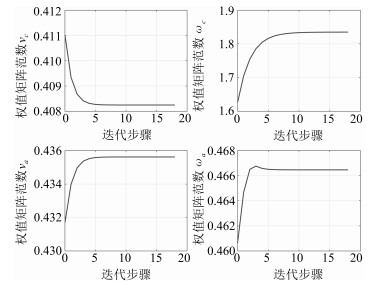
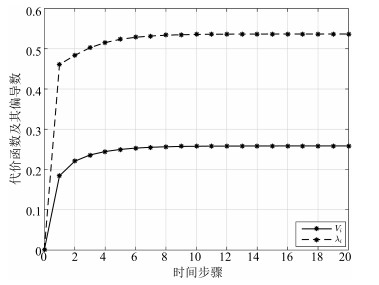
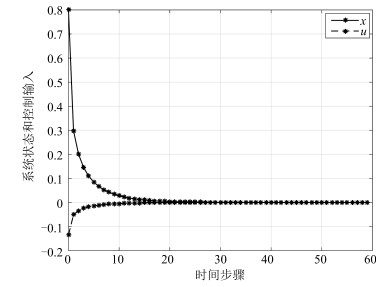
利用数据驱动控制思想,建立一种设计离散时间非线性系统近似最优调节器的迭代神经动态规划方法.提出针对离散时间一般非线性系统的迭代自适应动态规划算法并且证明其收敛性与最优性.通过构建三种神经网络,给出全局二次启发式动态规划技术及其详细的实现过程,其中执行网络是在神经动态规划的框架下进行训练.这种新颖的结构可以近似代价函数及其导函数,同时在不依赖系统动态的情况下自适应地学习近似最优控制律.值得注意的是,这在降低对于控制矩阵或者其神经网络表示的要求方面,明显地改进了迭代自适应动态规划算法的现有结果,能够促进复杂非线性系统基于数据的优化与控制设计的发展.通过两个仿真实验,验证本文提出的数据驱动最优调节方法的有效性.
利用数据驱动控制思想,建立一种设计离散时间非线性系统近似最优调节器的迭代神经动态规划方法.提出针对离散时间一般非线性系统的迭代自适应动态规划算法并且证明其收敛性与最优性.通过构建三种神经网络,给出全局二次启发式动态规划技术及其详细的实现过程,其中执行网络是在神经动态规划的框架下进行训练.这种新颖的结构可以近似代价函数及其导函数,同时在不依赖系统动态的情况下自适应地学习近似最优控制律.值得注意的是,这在降低对于控制矩阵或者其神经网络表示的要求方面,明显地改进了迭代自适应动态规划算法的现有结果,能够促进复杂非线性系统基于数据的优化与控制设计的发展.通过两个仿真实验,验证本文提出的数据驱动最优调节方法的有效性.



2017, 43(3): 376-389.
doi: 10.16383/j.aas.2017.c160039
摘要:
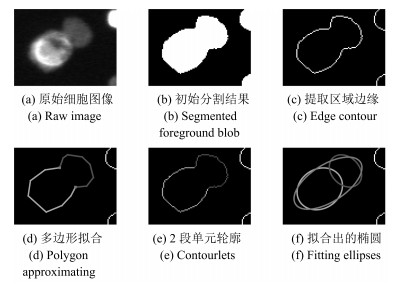
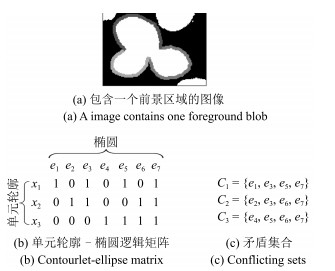
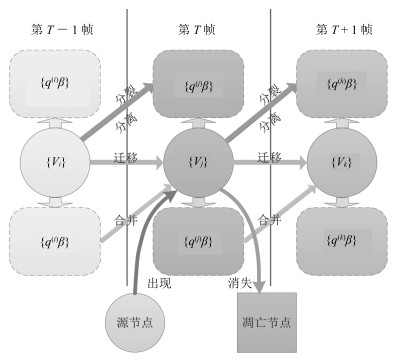
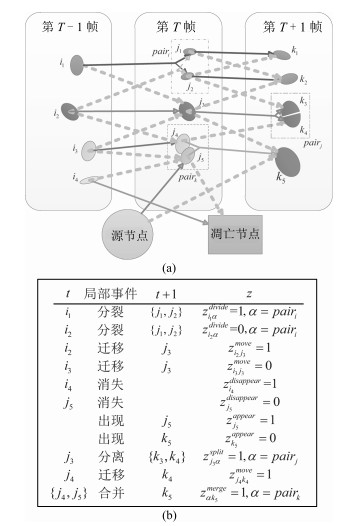
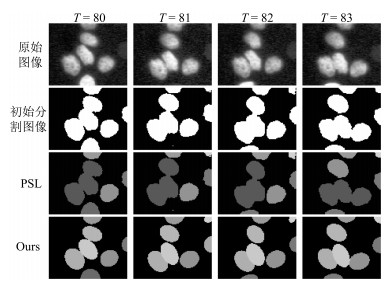
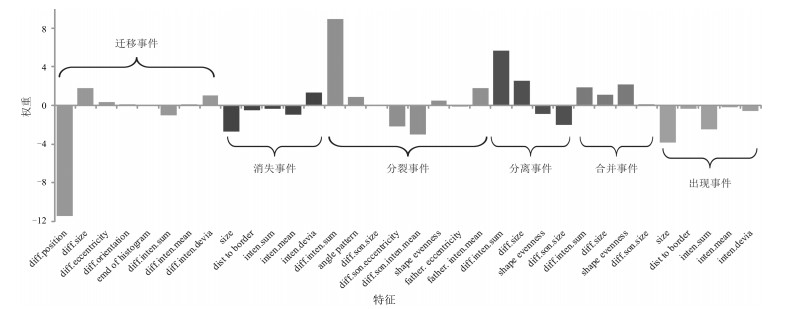
提出一种新的多细胞联合检测与跟踪方法,通过椭圆拟合构建细胞观测假说的完备集合,定义了多种局部事件来描述细胞的行为以及检测阶段可能出现的错误.通过引入相应的标签变量,将细胞跟踪建模为结构化预测问题,通过求解一个带约束的整数规划问题得到细胞轨迹的全局最优解.针对结构化预测模型中的参数学习问题,本文采用Block-coordinate Frank-Wolfe优化算法根据给定的训练样本求解模型的最优参数,同时给出了该算法的非线性核化版本.本文在多个公开数据集上对提出的算法进行了验证,结果表明,本文的实验表现相比于传统算法有着显著的提升.
提出一种新的多细胞联合检测与跟踪方法,通过椭圆拟合构建细胞观测假说的完备集合,定义了多种局部事件来描述细胞的行为以及检测阶段可能出现的错误.通过引入相应的标签变量,将细胞跟踪建模为结构化预测问题,通过求解一个带约束的整数规划问题得到细胞轨迹的全局最优解.针对结构化预测模型中的参数学习问题,本文采用Block-coordinate Frank-Wolfe优化算法根据给定的训练样本求解模型的最优参数,同时给出了该算法的非线性核化版本.本文在多个公开数据集上对提出的算法进行了验证,结果表明,本文的实验表现相比于传统算法有着显著的提升.

2017, 43(3): 390-397.
doi: 10.16383/j.aas.2017.c160068
摘要:
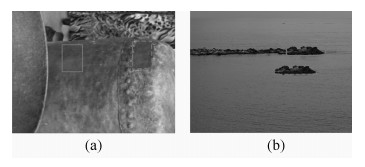
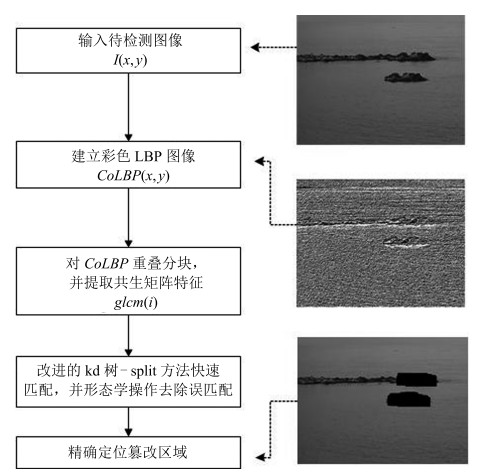
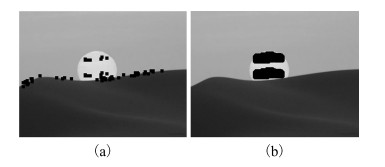
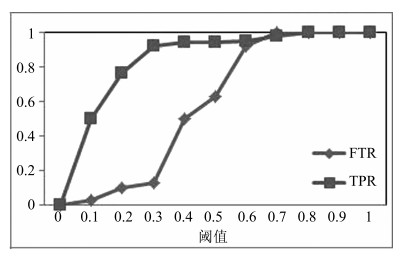
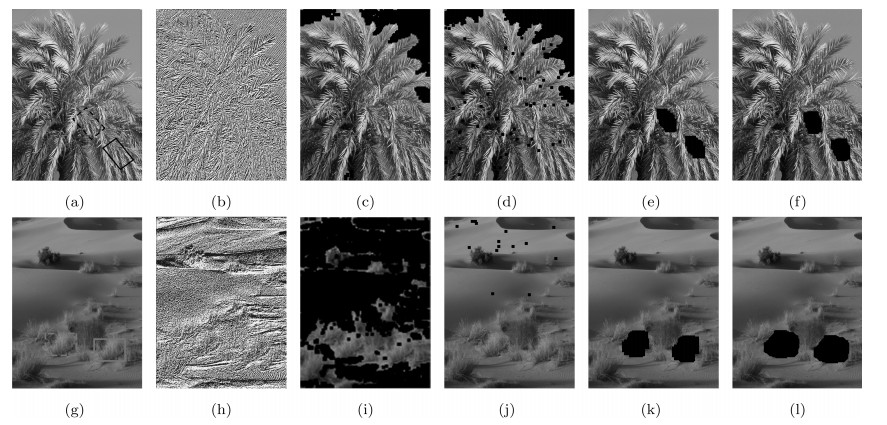
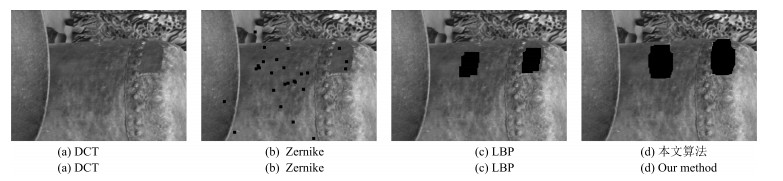
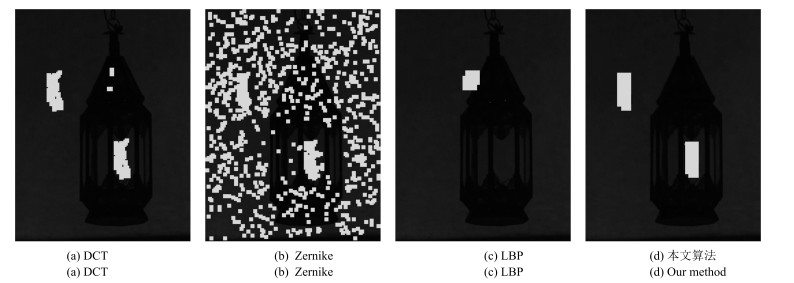
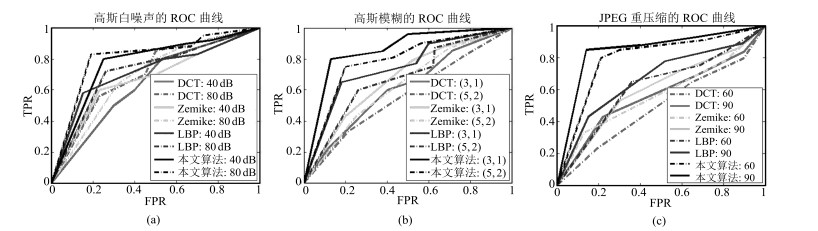
现有的复制-粘贴盲鉴别算法大多忽略图像彩色信息,导致对隐蔽性篡改方式的检测率较低,基于此,本文提出一种基于彩色局部二值模式(Color local binary patterns,CoLBP)的隐蔽性复制-粘贴盲鉴别算法.算法首先对彩色图像进行预处理,即建立彩色LBP纹理图像,从而实现彩色信息与LBP纹理特征的融合;其次重叠分块并提取灰度共生矩阵(Gray level co-occurrence matrix,GLCM)特征;最后,提出改进的kd树和超平面划分标记split搜索方法,快速匹配图像块,并应用形态学操作去除误匹配,精确定位复制-粘贴区域.实验结果表明,本算法对隐蔽性复制-粘贴篡改定位准确,并对模糊、噪声、JPEG重压缩后处理操作有很好的鲁棒性.
现有的复制-粘贴盲鉴别算法大多忽略图像彩色信息,导致对隐蔽性篡改方式的检测率较低,基于此,本文提出一种基于彩色局部二值模式(Color local binary patterns,CoLBP)的隐蔽性复制-粘贴盲鉴别算法.算法首先对彩色图像进行预处理,即建立彩色LBP纹理图像,从而实现彩色信息与LBP纹理特征的融合;其次重叠分块并提取灰度共生矩阵(Gray level co-occurrence matrix,GLCM)特征;最后,提出改进的kd树和超平面划分标记split搜索方法,快速匹配图像块,并应用形态学操作去除误匹配,精确定位复制-粘贴区域.实验结果表明,本算法对隐蔽性复制-粘贴篡改定位准确,并对模糊、噪声、JPEG重压缩后处理操作有很好的鲁棒性.





2017, 43(3): 398-406.
doi: 10.16383/j.aas.2017.c160130
摘要:
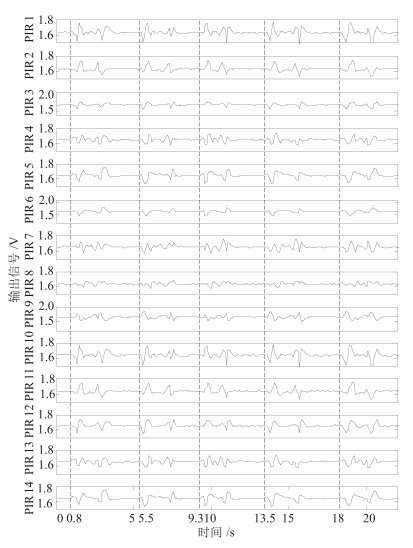
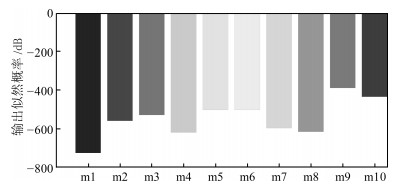
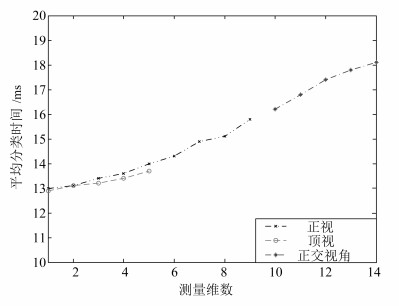
人体动作产生的辐射能量变化(Infrared radiation changes,IRC)信号是动作识别的重要线索,本文提出了一种基于隐马尔科夫模型的人体动作压缩红外分类新方法.针对人体动作的自遮挡问题,建立基于正交视角的压缩红外测量系统,获取人体动作在主投影面和辅助投影面的IRC压缩信号;然后,采用隐马尔科夫模型(Hidden Markov model,HMM)双层特征建模算法进行压缩域动作分类.实验结果表明双层特征建模的平均正确分类率高于主层特征建模,平均正确分类率可达95.71%.该方法为环境辅助生活系统提供了人体动作识别的新途径.
人体动作产生的辐射能量变化(Infrared radiation changes,IRC)信号是动作识别的重要线索,本文提出了一种基于隐马尔科夫模型的人体动作压缩红外分类新方法.针对人体动作的自遮挡问题,建立基于正交视角的压缩红外测量系统,获取人体动作在主投影面和辅助投影面的IRC压缩信号;然后,采用隐马尔科夫模型(Hidden Markov model,HMM)双层特征建模算法进行压缩域动作分类.实验结果表明双层特征建模的平均正确分类率高于主层特征建模,平均正确分类率可达95.71%.该方法为环境辅助生活系统提供了人体动作识别的新途径.





2017, 43(3): 407-417.
doi: 10.16383/j.aas.2017.c160230
摘要:
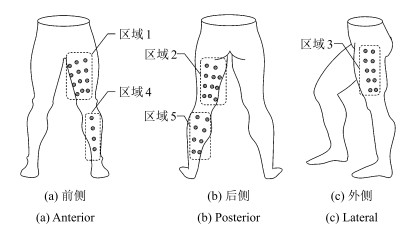
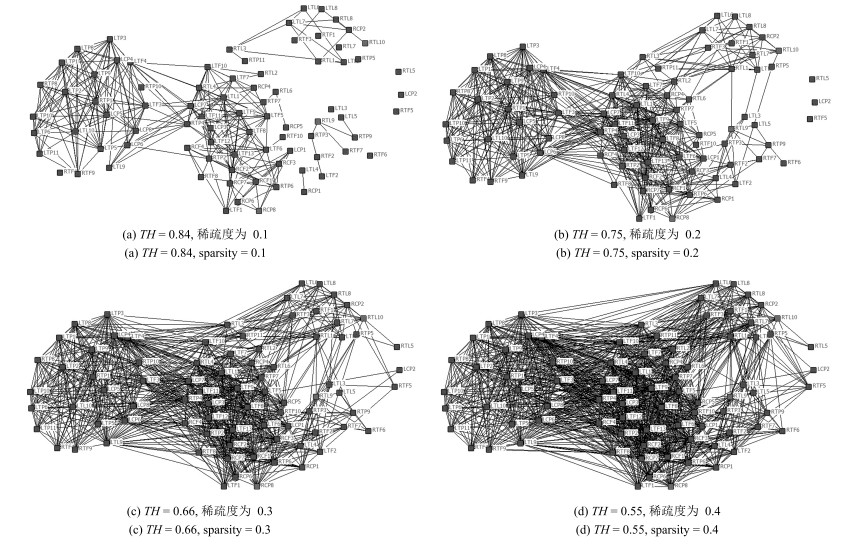
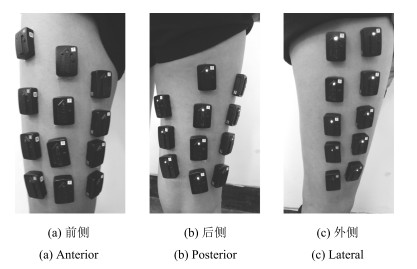
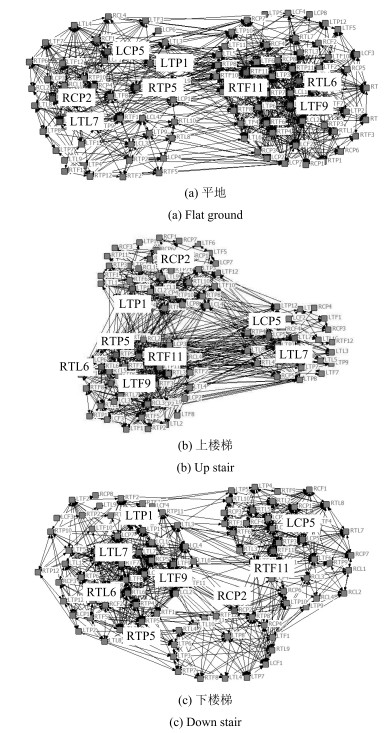
在肌电控制下肢康复辅具研究中,合适的肌电采集位置是运动模式识别的前提与基础.针对目前肌电采集位置缺乏成熟理论依据和统一标准的问题,选取90个下肢肌电采集点作为节点,通过计算节点间的肌电相关性,构建下肢肌肉功能网络,证明其具有小世界特性.实验结果表明:不同运动模式的网络具有明显的拓扑结构差异,通过网络特性分析可以确定与模式关联度大的肌电采集位置,取得较好的运动模式识别结果.通过构建及分析下肢肌肉功能网络,深入了解下肢运动模式更替过程中的肌肉协同工作机制,为下肢康复辅具控制中肌电采集位置的确定提供了理论支持.
在肌电控制下肢康复辅具研究中,合适的肌电采集位置是运动模式识别的前提与基础.针对目前肌电采集位置缺乏成熟理论依据和统一标准的问题,选取90个下肢肌电采集点作为节点,通过计算节点间的肌电相关性,构建下肢肌肉功能网络,证明其具有小世界特性.实验结果表明:不同运动模式的网络具有明显的拓扑结构差异,通过网络特性分析可以确定与模式关联度大的肌电采集位置,取得较好的运动模式识别结果.通过构建及分析下肢肌肉功能网络,深入了解下肢运动模式更替过程中的肌肉协同工作机制,为下肢康复辅具控制中肌电采集位置的确定提供了理论支持.



2017, 43(3): 418-429.
doi: 10.16383/j.aas.2017.c160197
摘要:
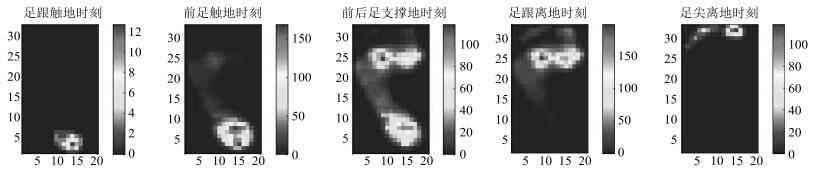
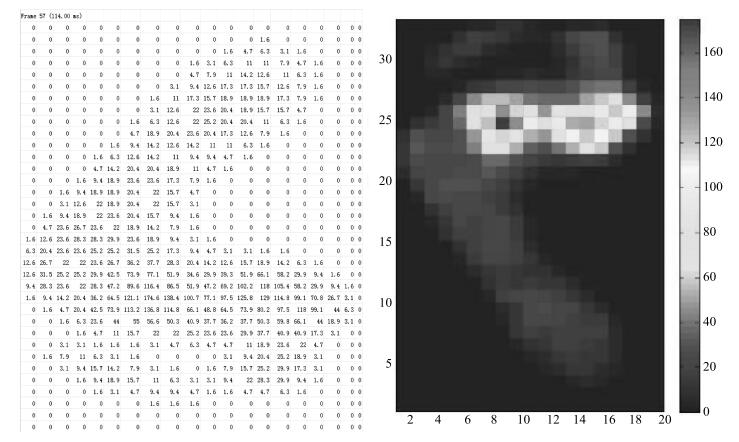
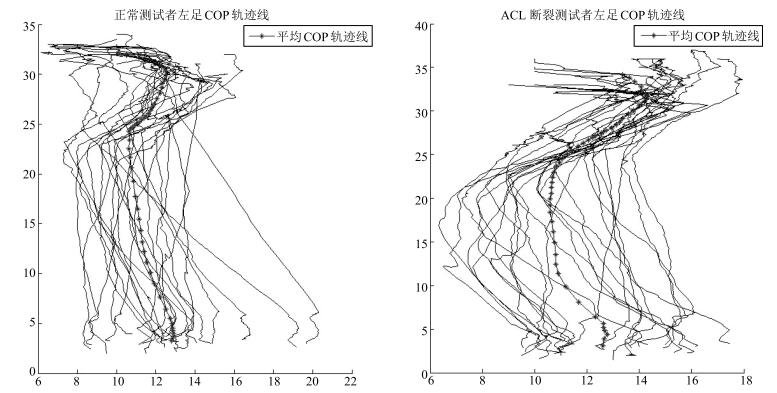
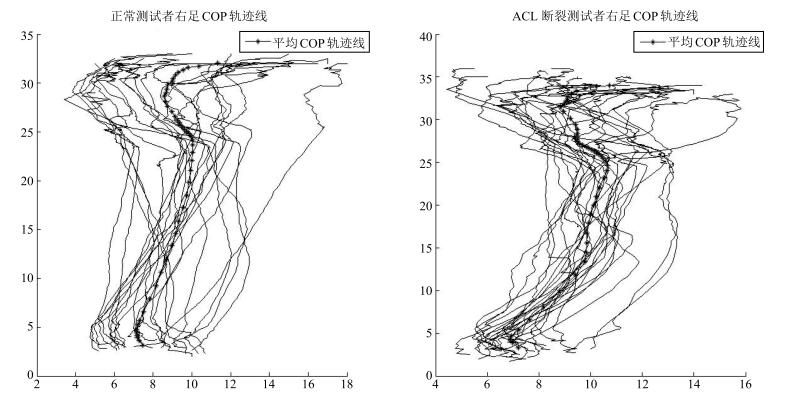
运动过程中,人体的步态特征可以在足底压力图像上有准确的记录,而这也就可以成为判断步态正常与否的一条有效依据.通过一组压力传感器阵列获取人体运动过程的足底压力分布数据,提取步态的运动学和动力学特性.在此基础上,采用极限学习机(Extreme learning machines,ELM)神经网络聚类算法对足底压力数据进行分析,完成正常与异常步态的分类辨识工作.本文从实际临床数据出发,对前交叉韧带断裂患者进行步态分析,并据医生的临床诊断结果进行校验.该方法在步态分析上取得了较为良好的效果,仿真结果表明了其有效性.
运动过程中,人体的步态特征可以在足底压力图像上有准确的记录,而这也就可以成为判断步态正常与否的一条有效依据.通过一组压力传感器阵列获取人体运动过程的足底压力分布数据,提取步态的运动学和动力学特性.在此基础上,采用极限学习机(Extreme learning machines,ELM)神经网络聚类算法对足底压力数据进行分析,完成正常与异常步态的分类辨识工作.本文从实际临床数据出发,对前交叉韧带断裂患者进行步态分析,并据医生的临床诊断结果进行校验.该方法在步态分析上取得了较为良好的效果,仿真结果表明了其有效性.



2017, 43(3): 430-438.
doi: 10.16383/j.aas.2017.c160114
摘要:
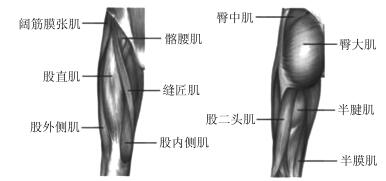
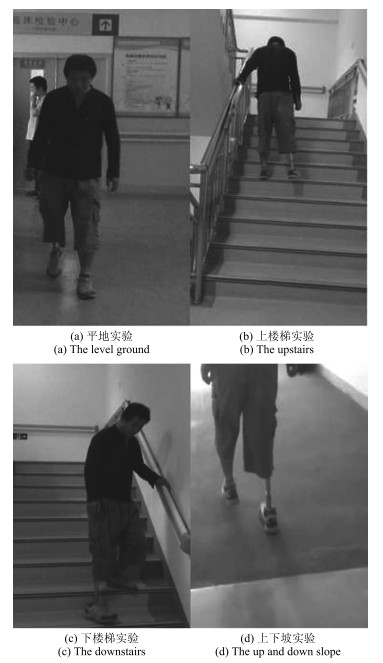
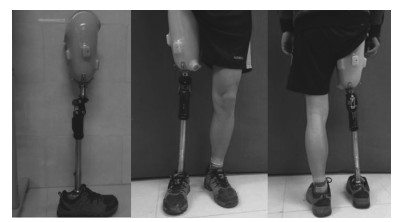
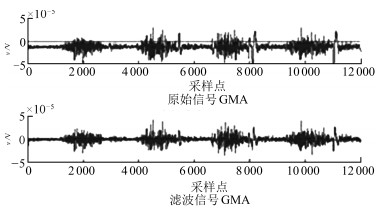
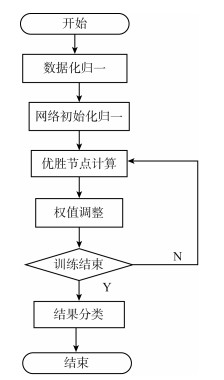
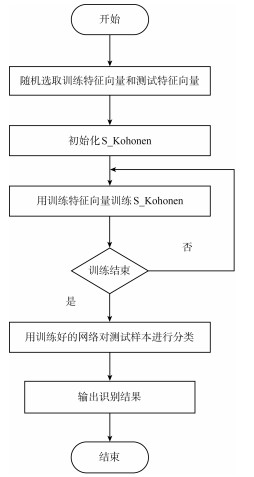
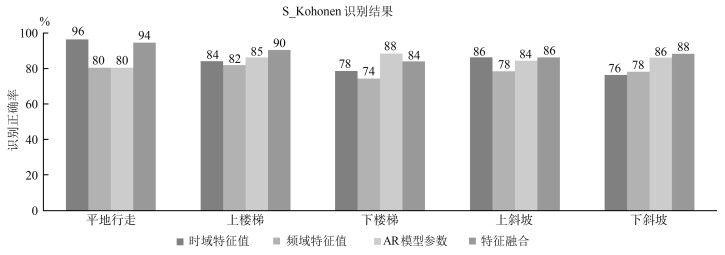
表面肌电信号随着时间的变化而改变,这将影响运动模式的分类精度.传统人体下肢假肢运动模式的识别算法不能保证在整个肌电控制时间内达到对运动模式的有效识别.为了解决这些问题,本文提取步态初期200ms的信号的特征值,将无监督和有监督的Kohonen神经网络算法应用到大腿截肢者残肢侧的步态识别中,并与传统BP神经网络进行了对比.结果表明,有监督的Kohonen神经网络算法将五种路况下步态的平均识别率提高到88.4%,优于无监督的Kohonen神经网络算法和BP神经网络.
表面肌电信号随着时间的变化而改变,这将影响运动模式的分类精度.传统人体下肢假肢运动模式的识别算法不能保证在整个肌电控制时间内达到对运动模式的有效识别.为了解决这些问题,本文提取步态初期200ms的信号的特征值,将无监督和有监督的Kohonen神经网络算法应用到大腿截肢者残肢侧的步态识别中,并与传统BP神经网络进行了对比.结果表明,有监督的Kohonen神经网络算法将五种路况下步态的平均识别率提高到88.4%,优于无监督的Kohonen神经网络算法和BP神经网络.





2017, 43(3): 439-447.
doi: 10.16383/j.aas.2017.c150753
摘要:
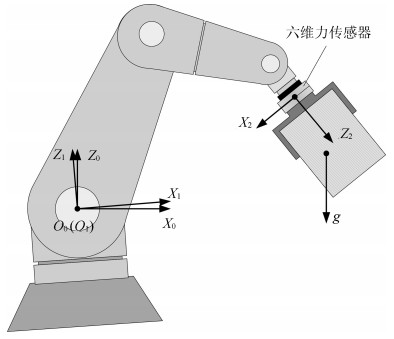
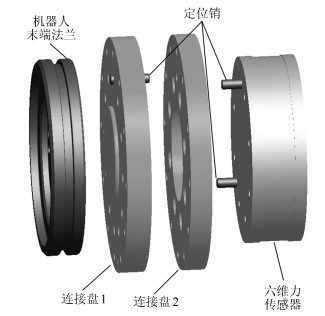
针对工业机器人末端负载与外界环境接触力的感知需求,在机器人法兰与负载之间设置六维力传感器,并研究一套标定与计算方法,综合考虑负载重力作用、传感器零点、机器人安装倾角等因素,利用不少于3个机器人姿态下的力传感器数据,可求得传感器零点、机器人安装倾角、负载重力大小、负载重心坐标等参数,进一步可消除传感器零点及负载重力对受力感知的影响,精确得到机器人末端负载所受的外部作用力与力矩.实验得到对于重量从320N到1917N的负载,在静态条件下,感知外力的误差在负载重力的0.28%以内,感知外力矩的误差在负载对传感器力矩的0.59%以内.
针对工业机器人末端负载与外界环境接触力的感知需求,在机器人法兰与负载之间设置六维力传感器,并研究一套标定与计算方法,综合考虑负载重力作用、传感器零点、机器人安装倾角等因素,利用不少于3个机器人姿态下的力传感器数据,可求得传感器零点、机器人安装倾角、负载重力大小、负载重心坐标等参数,进一步可消除传感器零点及负载重力对受力感知的影响,精确得到机器人末端负载所受的外部作用力与力矩.实验得到对于重量从320N到1917N的负载,在静态条件下,感知外力的误差在负载重力的0.28%以内,感知外力矩的误差在负载对传感器力矩的0.59%以内.




2017, 43(3): 448-461.
doi: 10.16383/j.aas.2017.c160308
摘要:
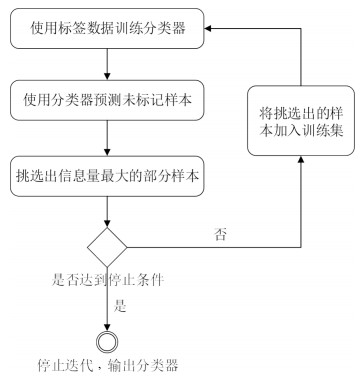
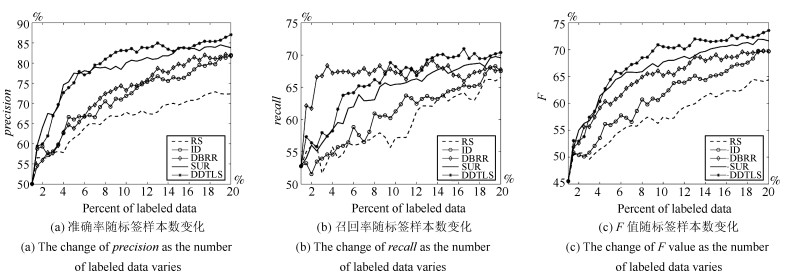
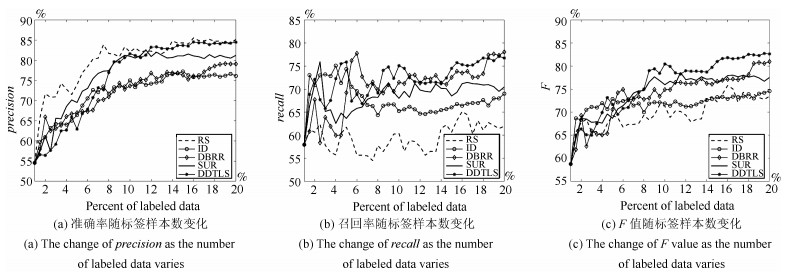
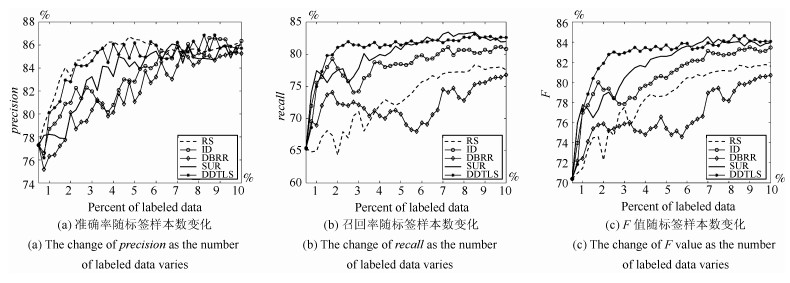
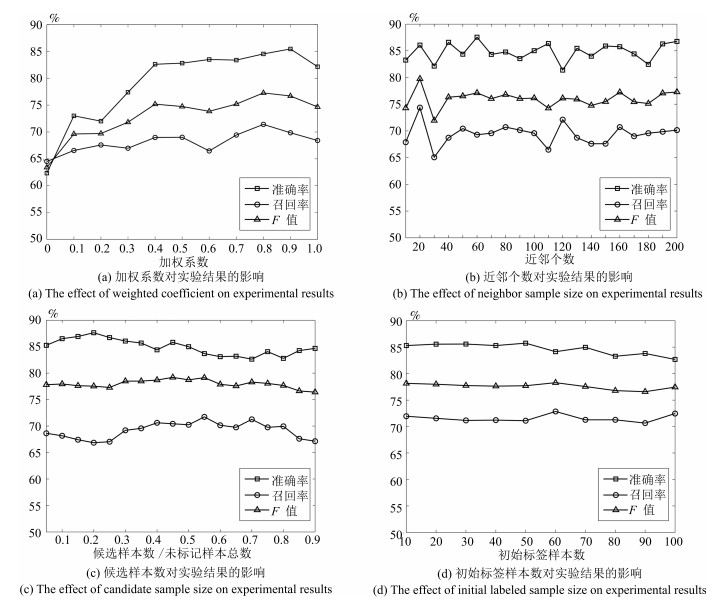
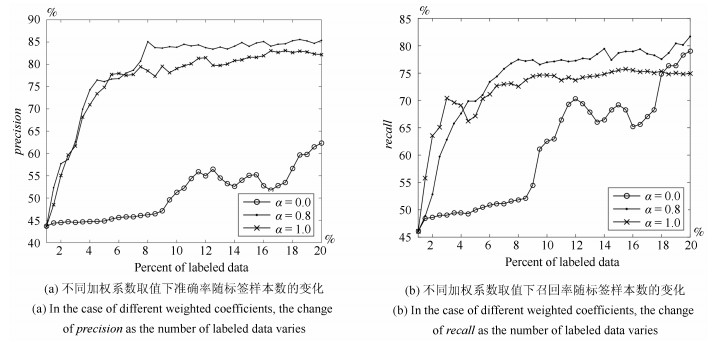
社交网络的飞速发展给用户带来了便捷,但是社交网络开放性的特点使得其容易受到虚假用户的影响.虚假用户借用社交网络传播虚假信息达到自身的目的,这种行为严重影响着社交网络的安全性和稳定性.目前社交网络虚假用户的检测方法主要通过用户的行为、文本和网络关系等特征对用户进行分类,由于人工标注用户数据需要的代价较大,导致分类器能够使用的标签样本不足.为解决此问题,本文提出一种基于双层采样主动学习的社交网络虚假用户检测方法,该方法使用样本不确定性、代表性和多样性3个指标评估未标记样本的价值,并使用排序和聚类相结合的双层采样算法对未标记样本进行筛选,选出最有价值的样本给专家标注,用于对分类模型的训练.在Twitter、Apontador和Youtube数据集上的实验说明本文所提方法在标签样本数量不足的情况下,只使用少量有标签样本就可以达到与有监督学习接近的检测效果;并且,对比其他主动学习方法,本文方法具有更高的准确率和召回率,需要的标签样本数量更少.
社交网络的飞速发展给用户带来了便捷,但是社交网络开放性的特点使得其容易受到虚假用户的影响.虚假用户借用社交网络传播虚假信息达到自身的目的,这种行为严重影响着社交网络的安全性和稳定性.目前社交网络虚假用户的检测方法主要通过用户的行为、文本和网络关系等特征对用户进行分类,由于人工标注用户数据需要的代价较大,导致分类器能够使用的标签样本不足.为解决此问题,本文提出一种基于双层采样主动学习的社交网络虚假用户检测方法,该方法使用样本不确定性、代表性和多样性3个指标评估未标记样本的价值,并使用排序和聚类相结合的双层采样算法对未标记样本进行筛选,选出最有价值的样本给专家标注,用于对分类模型的训练.在Twitter、Apontador和Youtube数据集上的实验说明本文所提方法在标签样本数量不足的情况下,只使用少量有标签样本就可以达到与有监督学习接近的检测效果;并且,对比其他主动学习方法,本文方法具有更高的准确率和召回率,需要的标签样本数量更少.


2017, 43(3): 462-471.
doi: 10.16383/j.aas.2017.c160060
摘要:
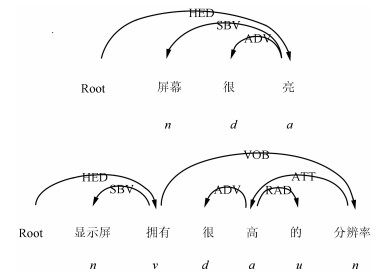
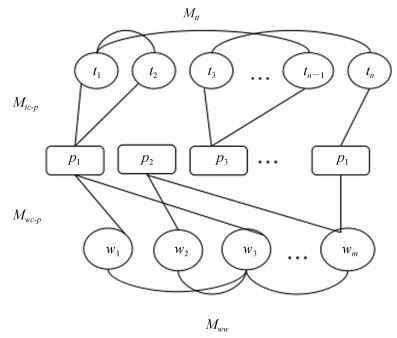
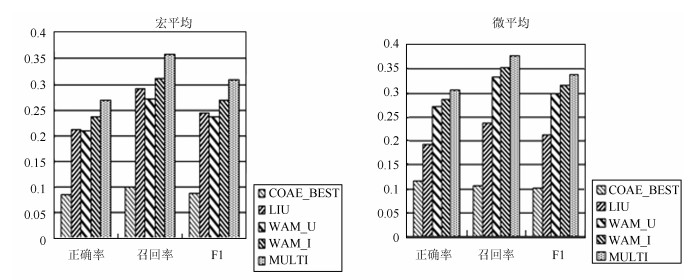
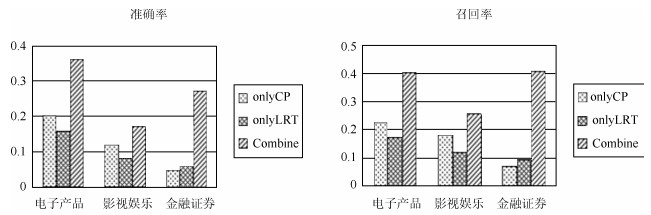
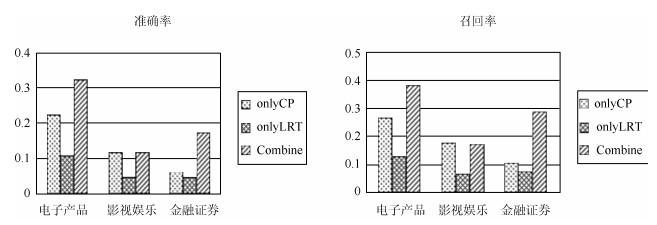
中文评价对象与评价词抽取是文本倾向性分析的重要问题.如何利用评价对象与评价词之间的语法、共现等关系设计模型是提高抽取精度的关键.本文提出了一种基于多层关系图模型的中文评价对象与评价词抽取方法.该方法首先利用词对齐模型抽取评价对象与评价词搭配;然后,考虑评价对象与评价词的依存句法关系、评价对象内部的共现关系和评价词内部的共现关系,建立多层情感关系图,接着利用随机游走方法计算候选评价对象与评价词的置信度;最后,选取置信度高的候选评价对象与评价词作为输出.实验结果表明,与现有的方法相比,本文所提出的方法不仅对评价对象和评价词的抽取精度均有显著提升,而且具有良好的鲁棒性.
中文评价对象与评价词抽取是文本倾向性分析的重要问题.如何利用评价对象与评价词之间的语法、共现等关系设计模型是提高抽取精度的关键.本文提出了一种基于多层关系图模型的中文评价对象与评价词抽取方法.该方法首先利用词对齐模型抽取评价对象与评价词搭配;然后,考虑评价对象与评价词的依存句法关系、评价对象内部的共现关系和评价词内部的共现关系,建立多层情感关系图,接着利用随机游走方法计算候选评价对象与评价词的置信度;最后,选取置信度高的候选评价对象与评价词作为输出.实验结果表明,与现有的方法相比,本文所提出的方法不仅对评价对象和评价词的抽取精度均有显著提升,而且具有良好的鲁棒性.


2017, 43(3): 472-477.
doi: 10.16383/j.aas.2017.c160304
摘要:
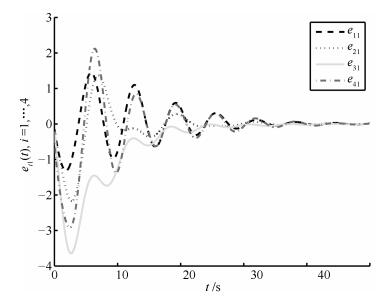
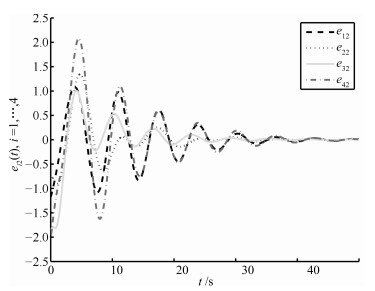
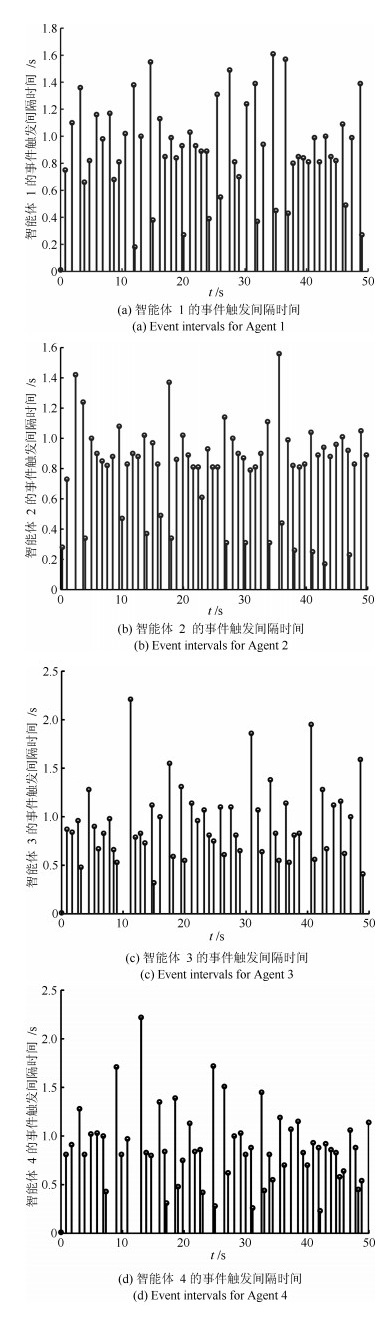
研究切换拓扑下线性异构多智能体系统的协同输出调节问题,并设计了一个基于事件触发的输出调节控制机制.设计的控制机制不仅可以实现智能体对外部系统的渐近跟踪和干扰抑制,还可以有效减少智能体之间的信息传递数量,从而降低通信负载减少网络能耗.最后通过仿真验证结论的有效性.
研究切换拓扑下线性异构多智能体系统的协同输出调节问题,并设计了一个基于事件触发的输出调节控制机制.设计的控制机制不仅可以实现智能体对外部系统的渐近跟踪和干扰抑制,还可以有效减少智能体之间的信息传递数量,从而降低通信负载减少网络能耗.最后通过仿真验证结论的有效性.
2017, 43(3): 478-486.
doi: 10.16383/j.aas.2017.c160012
摘要:
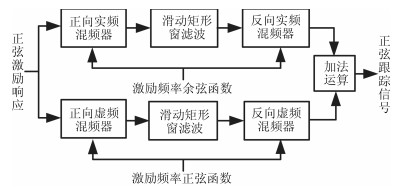
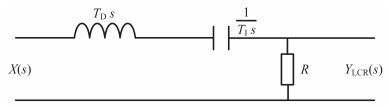
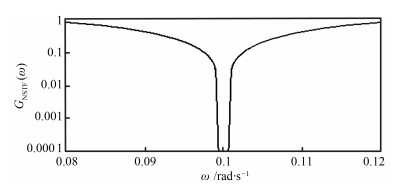
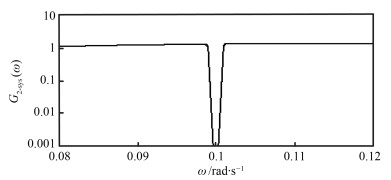
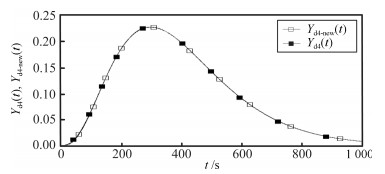
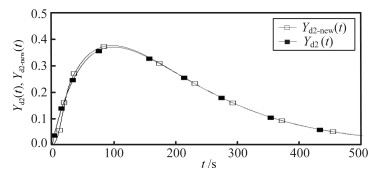
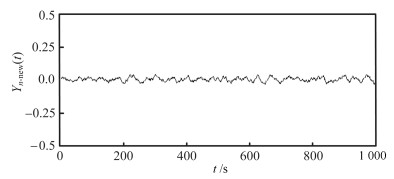
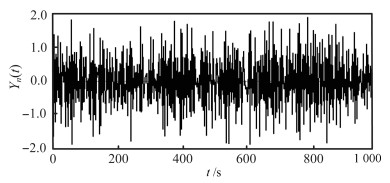
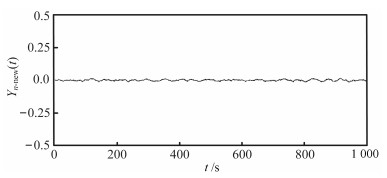
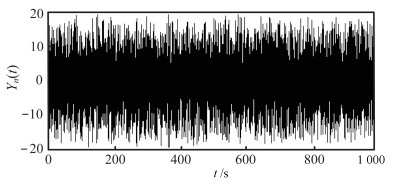
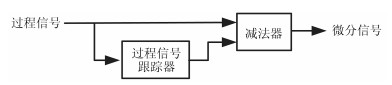
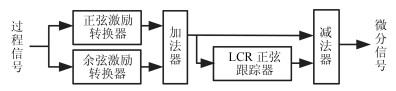
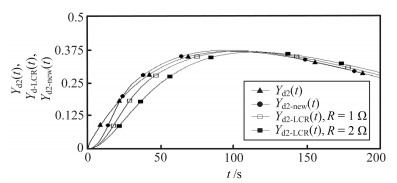
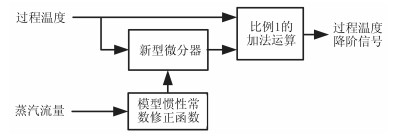
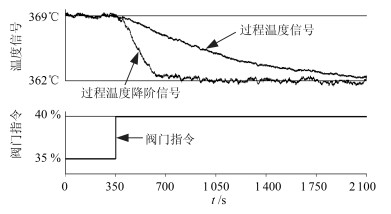
针对经典微分方法存在显著的干扰放大效应和非线性微分方法的不足,提出了一种新型线性微分方法.文中分析了对象阶跃激励响应和正弦激励响应的内在关联.指出了在一定的条件下,可通过对象的正弦激励响应获取对象阶跃激励响应的微分信号.并给出了一种点频滤波器能够实现阶跃激励到正弦激励的转换方法.进而由点频滤波器和一种新型正弦跟踪滤波器等构建了一种新型微分信号提取的逻辑回路结构.文中提出的方法具有良好的抗噪声干扰特性,是线性滤波技术的发展与延伸,并具有良好的理论意义和实际应用前景,可作为经典控制理论的有益补充.数学分析、仿真实验和实际应用的结果进一步证实了文中所述方法的正确性和有效性.
针对经典微分方法存在显著的干扰放大效应和非线性微分方法的不足,提出了一种新型线性微分方法.文中分析了对象阶跃激励响应和正弦激励响应的内在关联.指出了在一定的条件下,可通过对象的正弦激励响应获取对象阶跃激励响应的微分信号.并给出了一种点频滤波器能够实现阶跃激励到正弦激励的转换方法.进而由点频滤波器和一种新型正弦跟踪滤波器等构建了一种新型微分信号提取的逻辑回路结构.文中提出的方法具有良好的抗噪声干扰特性,是线性滤波技术的发展与延伸,并具有良好的理论意义和实际应用前景,可作为经典控制理论的有益补充.数学分析、仿真实验和实际应用的结果进一步证实了文中所述方法的正确性和有效性.






2017, 43(3): 486-492.
doi: 10.16383/j.aas.2017.c150827
摘要:
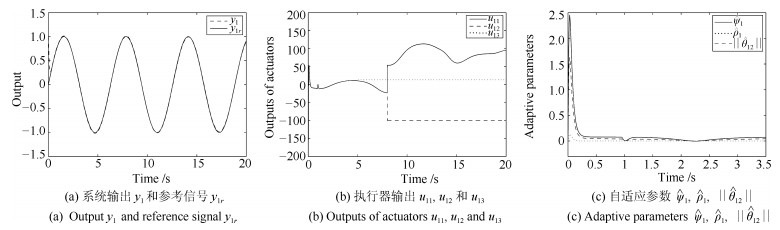
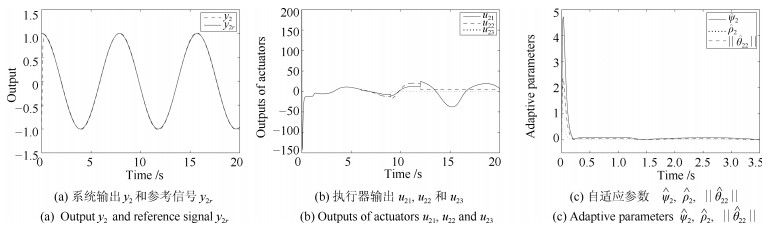
针对一类不确定非线性时滞关联大系统,提出了一种基于时滞代换的自适应分散容错控制方案.该方案采用模糊逻辑系统作为逼近器,提出了时滞代换的方法处理系统未知时滞关联函数,并结合自适应技术处理代换误差和逼近误差.与现有方法相比,本文方法能在线补偿所有四种类型的执行器故障,系统控制器的设计也不再依赖于时滞假设条件,同时还可保证闭环系统所有信号全局一致最终有界.仿真结果进一步验证了本文方法的有效性.
针对一类不确定非线性时滞关联大系统,提出了一种基于时滞代换的自适应分散容错控制方案.该方案采用模糊逻辑系统作为逼近器,提出了时滞代换的方法处理系统未知时滞关联函数,并结合自适应技术处理代换误差和逼近误差.与现有方法相比,本文方法能在线补偿所有四种类型的执行器故障,系统控制器的设计也不再依赖于时滞假设条件,同时还可保证闭环系统所有信号全局一致最终有界.仿真结果进一步验证了本文方法的有效性.