

Prescribed Performance Finite-time H∞ Tracking Control for a Class of p-normal Form Nonlinear Systems
-
摘要: 针对一类带有外部扰动的非严格反馈p规范型非线性系统, 在一种新的预设性能控制思想的基础上, 结合加幂积分技术、H∞ 控制理论及神经自适应技术, 提出了一种自适应神经预设性能有限时间H∞ 跟踪控制器的设计方法. 所设计的控制器能够保证系统的跟踪误差被有限时间性能函数约束, 并在任意给定的停息时间内收敛到平衡点的一个预先给定的邻域内, 且能够抑制外部扰动对系统的影响. 特别地, 该停息时间与系统初始状态无关. 两个仿真例子验证了所设计控制器的有效性和优越性.Abstract: Based on a new prescribed performance control thought, a design method of adaptive neural prescribed performance finite-time H∞ tracking controller is proposed for a class of non-strict feedback p-normal form nonlinear systems with external disturbances by combining the adding a power integer technique, the H∞ control theory with the neural adaptive technology. The designed controller can guarantee that the tracking error of the system is constrained by a finite-time performance function, and the tracking error can converge to a predetermined neighborhood of the equilibrium within the arbitrarily given settling time. And the impact of external disturbances on the system can be attenuated. Specially, the settling time is irrelevant to the initial states of the system. Two simulation examples show the effectiveness and advantage of the proposed method.
-
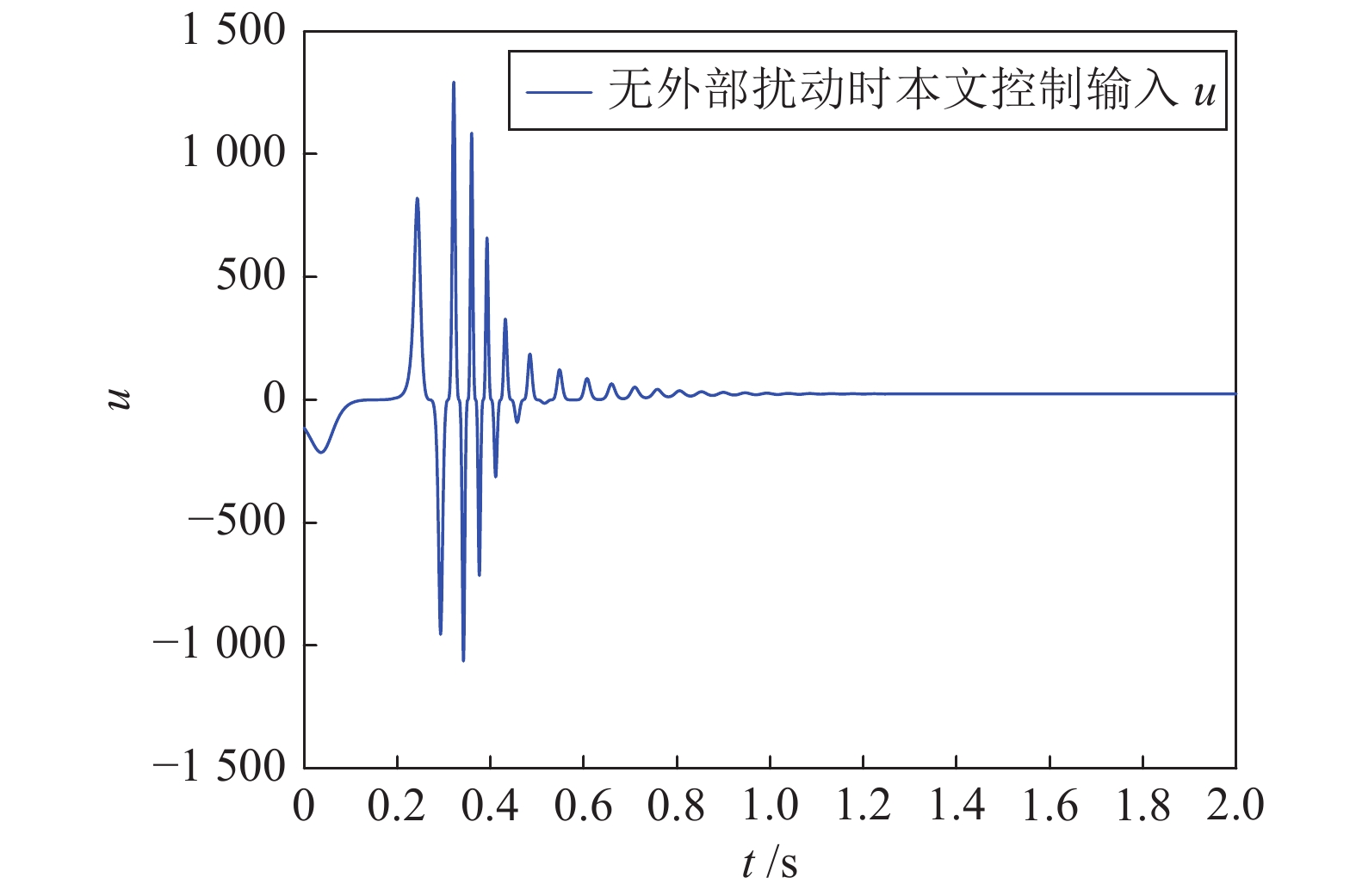
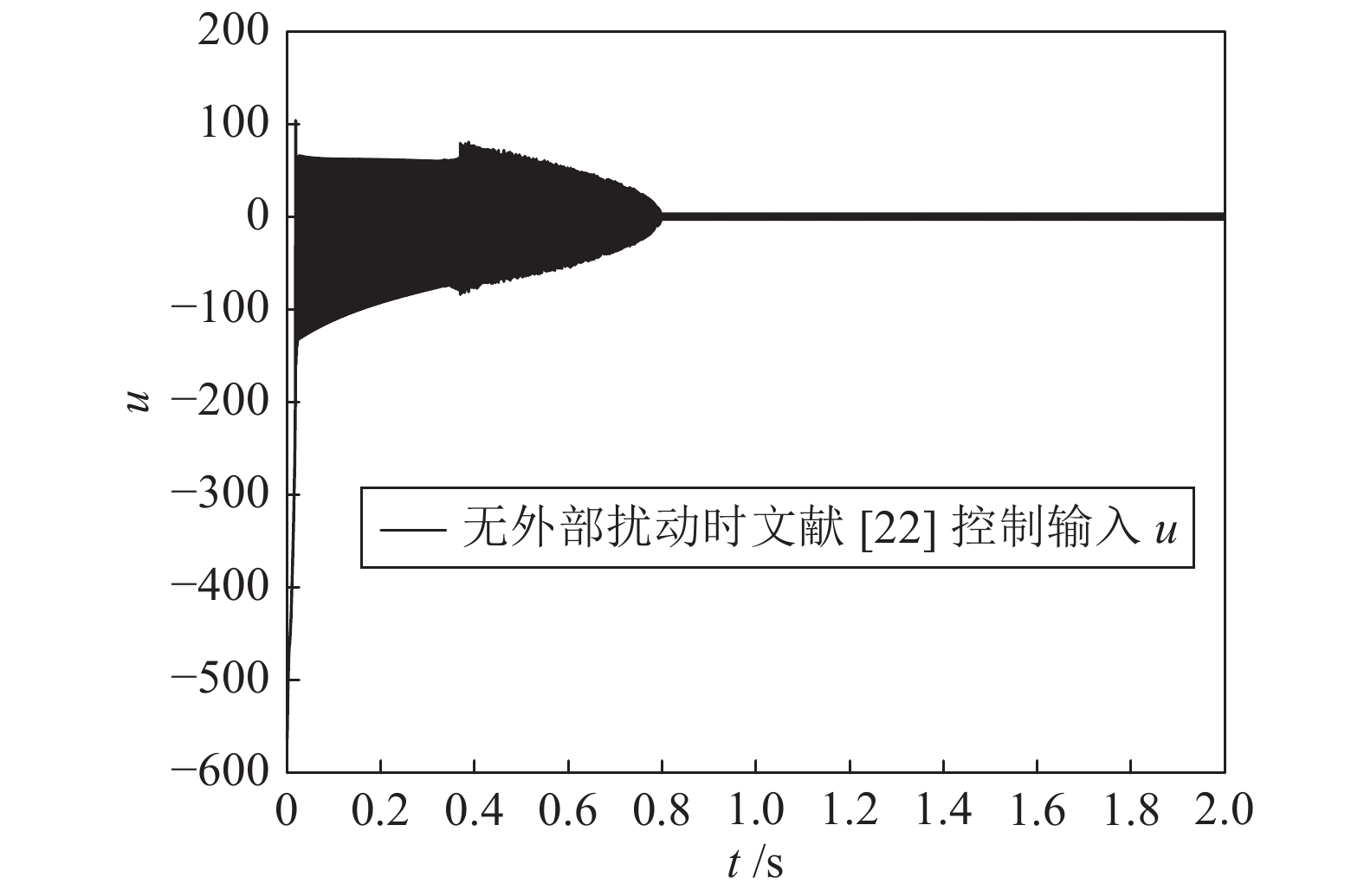
图 4 无外部扰动时本文的控制输入
$u$ Fig. 4 Control input
$u$ of this paper without external disturbance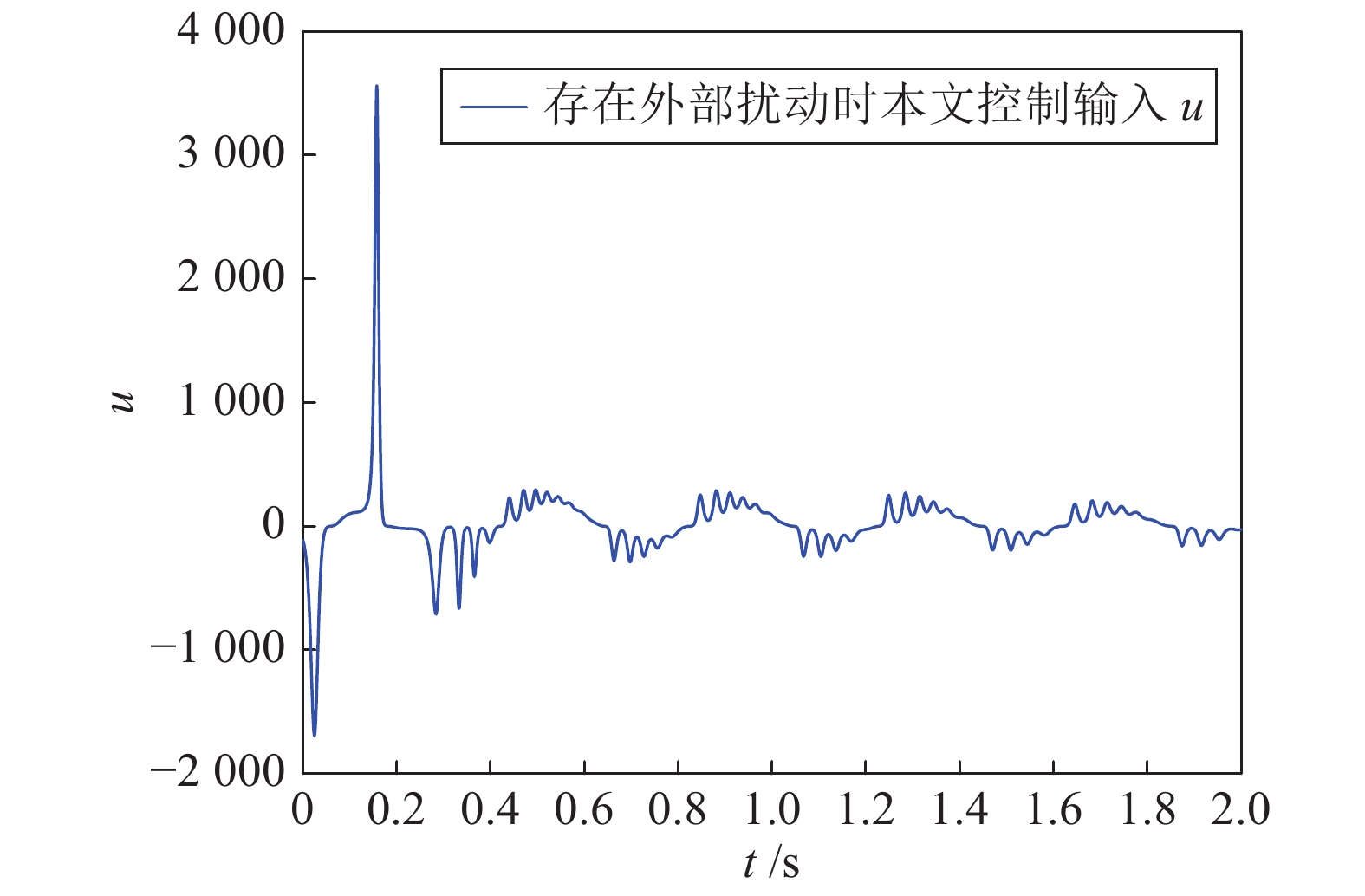
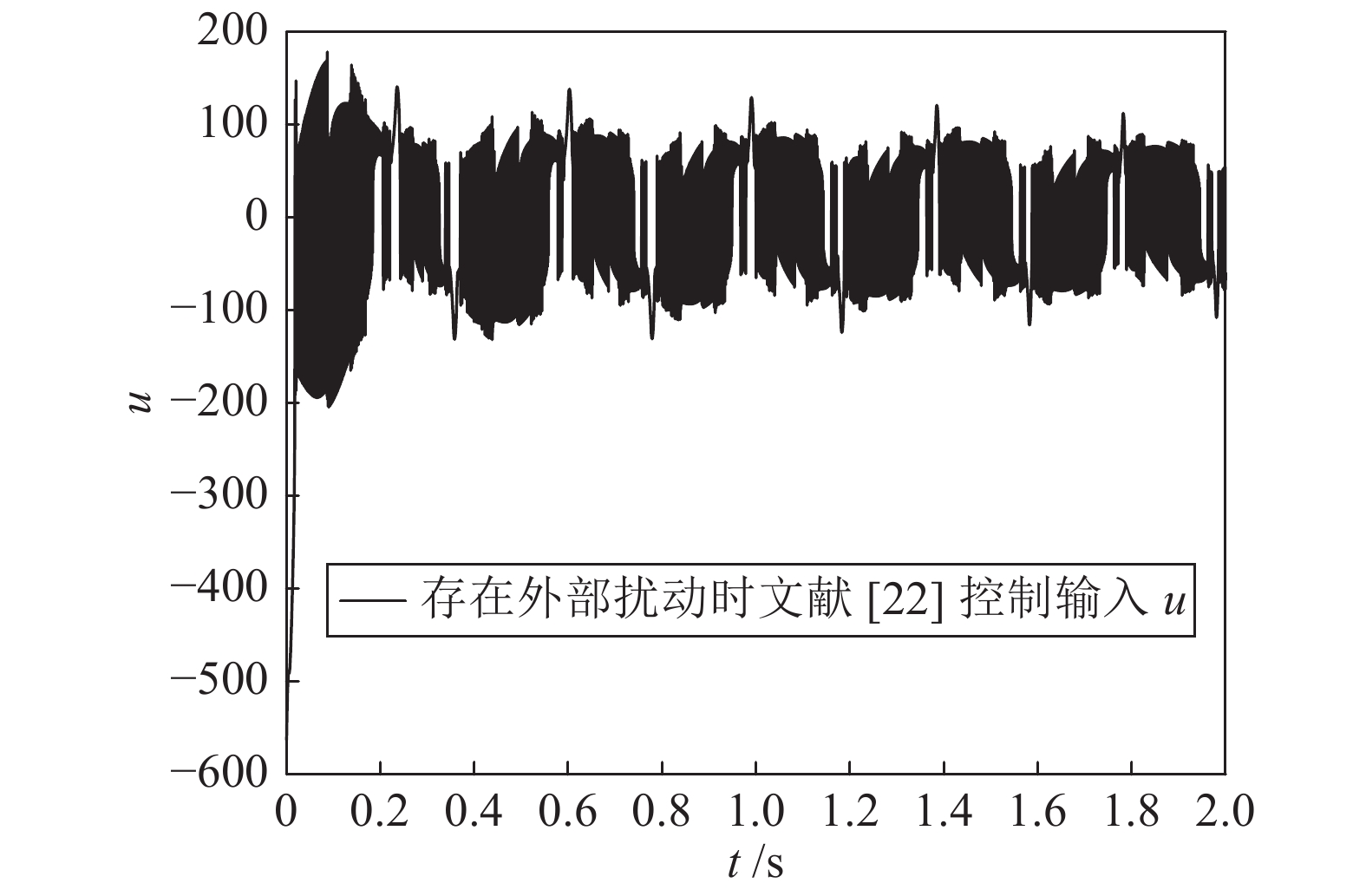
图 7 存在外部扰动时本文的控制输入
$u$ Fig. 7 Control input
$u$ of this paper with external disturbance -
[1] 耿志勇. 基于庞特里亚金极小值原理的多运载体有限时间编队控制. 自动化学报, 2017, 43(1): 40-59Geng Zhi-Yong. Finite time formation control for multiple vehicles based on pontryagin’s minimum principle. Acta Automatica Sinica, 2017, 43(1): 40-59(in Chinese) [2] Mo L P, Yu Y G. Finite-time rotating encirclement control of multi-agent systems. Acta Automatica Sinica, 2017, 43(9): 183-190 [3] Liu H, Shen Y, Zhao X D. Finite-time stabilization and boundedness of switched linear system under statedependent switching. Journal of the Franklin Institute, 2013, 350(3): 541-555 doi: 10.1016/j.jfranklin.2012.12.014 [4] Zheng S Q, Li W J. Fuzzy finite time control for switched systems via adding a barrier power integrator. IEEE Transactions on Cybernetics, 2018, (99): 1-14 [5] 李小华, 刘洋, 刘晓平. 一类扩展结构大系统的分散有限时间鲁棒关联镇定. 控制与决策, 2015, 30(11): 1967-1973Li Xiao-Hua, Liu Yang, Liu Xiao-Ping. Decentralized finite-time robust connective stabilization for a class of large-scale systems with expanding construction. Control and Decision, 2015, 30(11): 1967-1973(in Chinese) [6] Wang Z, Li S H, Fei S M. Finite-time tracking control of a nonholonomic mobile robot. Asian Journal of Control, 2009, 11(3): 344-357 doi: 10.1002/asjc.v11:3 [7] Du H B, Li S H, Qian C J. Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Transactions on Automatic Control, 2011, 56(11): 2711-2717 doi: 10.1109/TAC.2011.2159419 [8] Tian B L, Lu H C, Zuo Z Y, Zong Q, Zhang Y P. Multivariable finite-time output feedback trajectory tracking control of quadrotor helicopters. International Journal of Robust and Nonlinear Control, 2017, 28(1): 281-295 [9] Huang S P, Xiang Z R. Finite-time output tracking for a class of switched nonlinear systems. International Journal of Robust and Nonlinear Control, 2017, 27(6): 1017- 1038 doi: 10.1002/rnc.v27.6 [10] 陈明, 张士勇. 基于Backstepping的非线性系统预设性能鲁棒控制器设计. 控制与决策, 2015, 30(5): 877-881Chen Ming, Zhang Shi-Yong. Prescribed performance robust controller design for nonlinear systems based on backstepping. Control and Decision, 2015, 30(5): 877-881(in Chinese) [11] Guan Z Y, Ma Y P, Zheng Z W, Guo N. Prescribed performance control for automatic carrier landing with disturbance. Nonlinear Dynamics, 2018, 94(2): 1-15 [12] Wang M, Wang C, Liu X P. Dynamic learning from adaptive neural control with predefined performance for a class of nonlinear systems. Information Sciences, 2014, 279: 874-888 doi: 10.1016/j.ins.2014.04.038 [13] Jing Y W, Liu Y, Zhou S W. Prescribed performance finite-Time tracking control for uncertain nonlinear systems. Journal of Systems Science and Complexity, 2018. DOI: 10.1007/s11424-018-7287-5 [14] Zhang J X, Yang G H. Prescribed performance faulttolerant control of uncertain nonlinear systems with unknown control directions. IEEE Transactions on Automatic Control, 2018, 62(12): 6529-6535 [15] Liu Y, Liu X P, Jin Y W. Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance. Information Sciences, 2018, 468: 29-46 doi: 10.1016/j.ins.2018.08.029 [16] Yang B, Lin W. Homogeneous observers, iterative design, and global stabilization of high-order nonlinear systems by smooth output feedback. IEEE Transactions on Automatic Control, 2004, 49(7): 1069-1080 doi: 10.1109/TAC.2004.831186 [17] Zhang H B, Feng G, Dang C Y. An approach to H∞ control of a class of nonlinear stochastic systems. Circuits Systems & Signal Processing, 2012, 31(1): 127-141 [18] Yang H, Wang Z D, Shu H S, Alsaadi E, Hayat T. Almost sure H∞ sliding mode control for nonlinear stochastic systems with markovian switching and timedelays. Neurocomputing, 2016, 175(PA): 392-400 [19] Li X H, Liu X P. Backstepping-based decentralized adaptive neural H∞ control for a class of large-scale nonlinear systems with expanding construction. Nonlinear Dynamics, 2017, 90(2): 1373-1392 doi: 10.1007/s11071-017-3733-5 [20] 陆国平, 郑毓蕃. 一类非线性不确定系统的鲁棒H∞控制. 自动化学报, 1999, 25(3): 388-392Lu Guo-Ping, Zheng Yu-Fan. Robust H∞ control for nonlinear systems with parameter uncertainty. Acta Automatica Sinica, 1999, 25(3): 388-392(in Chinese) [21] 柴琳, 费树岷, 辛云冰. 一类带未知输入时滞的多时滞非线性系统的对时滞参数的自适应H∞控制. 自动化学报, 2006, 32(2): 237-245Chai Lin, Fei Shu-Min, Xin Yun-Bing. Adaptive H∞ control for a class of nonlinear time-delay systems with uncertain input delay. Acta Automatica Sinica, 2006, 32(2): 237-245(in Chinese) [22] Liu Y, Liu X P, Jing Y W, et al. Design of finite-time H∞ controller for uncertain nonlinear systems and its application. International Journal of Control, 2018, DOI: 10.1080/00207179.2018.1466060 [23] Huang J S, Wen C Y, Wang W, Song Y D. Design of adaptive finite-time controllers for nonlinear uncertain systems based on given transient specifications. Automatica, 2016, 69(C): 395-404 [24] Sanner R M, Slotine J J E. Gaussian networks for direct adaptive control. IEEE Transactions on Neural Networks. 1992, 3(6): 837-863 doi: 10.1109/72.165588 [25] Su Y M, Chen B, Lin C, Wang H H, Zhou S W. Adaptive neural control for a class of stochastic nonlinear systems by backstepping approach. Information Sciences, 2016, 369: 748-764 doi: 10.1016/j.ins.2016.06.010 [26] Drogomir S S. Some Gronwall Type Inequalities and Applications. New York: Nova Science Publishers, 2003. [27] Gao F Z, Wu Y Q. Global state feedback stabilisation for a class of more general high-order non-linear systems. IET Control Theory and Applications. 2014, 8(16): 1648-1655 doi: 10.1049/iet-cta.2014.0175 [28] Matoba S, Nakamura N, Nakamura H, Nishitani H. Robust finite-time control of robot manipulators. In: Proceedings of the 18th World Congress The International Federation of Automatic Control, Milano, Italy: IFAC, 2011. 11863−11868 -



 下载:
下载:


















 点击查看大图
点击查看大图
图(10)
计量
- 文章访问数: 1072
- HTML全文浏览量: 321
- PDF下载量: 245
- 被引次数: 0
