

-
摘要: 本文在现有脉冲控制理论的基础上, 针对离散时滞系统, 提出了一种扩展脉冲控制的数学描述方法.基于该描述方法, 推导出脉冲控制扩展定理.该扩展定理的合理应用不仅可以有效避免执行器饱和特性的影响, 而且可以分析执行器存在响应时间时系统的稳定性.进一步研究发现, 当系统存在Neimark-Sacker分岔时, 依据扩展定理设计的控制器可以有效提高系统的临界分岔参数.Abstract: This paper presents a mathematical description of extended impulsive control for discrete time-delay systems according to the impulsive control theory. Based on this mathematical description, the stability theorem of extended impulsive control is derived. The extension theorem not only avoids the influence of actuator saturation, but also can be used to analyze the stability of the system when the actuator has response time. Further research findings show that the controller designed according to extension theorem can greatly improve the critical bifurcation parameter of a system.
-
Key words:
- Extended impulsive control /
- discrete time-delay systems /
- actuator saturation /
- actuator response time
1) 本文责任编委 贺威 -
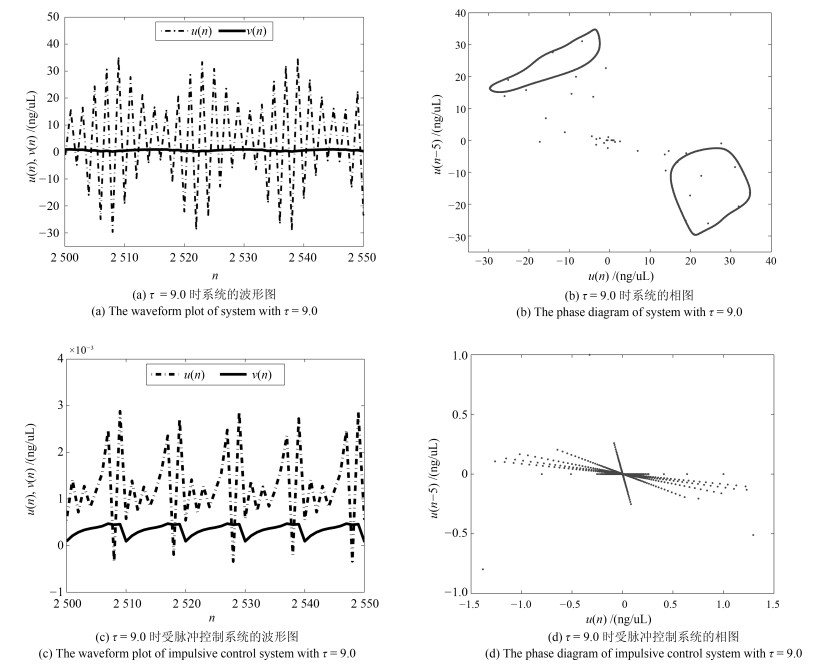
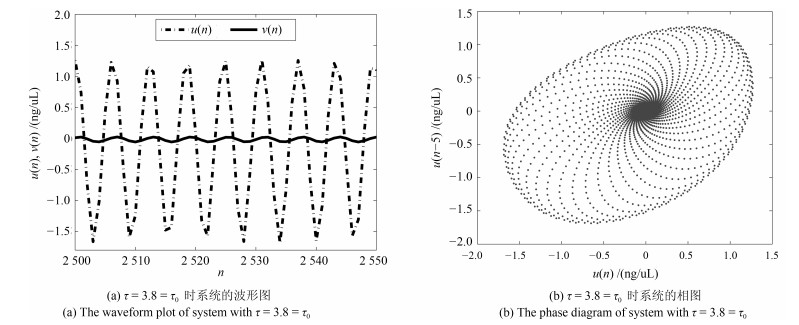
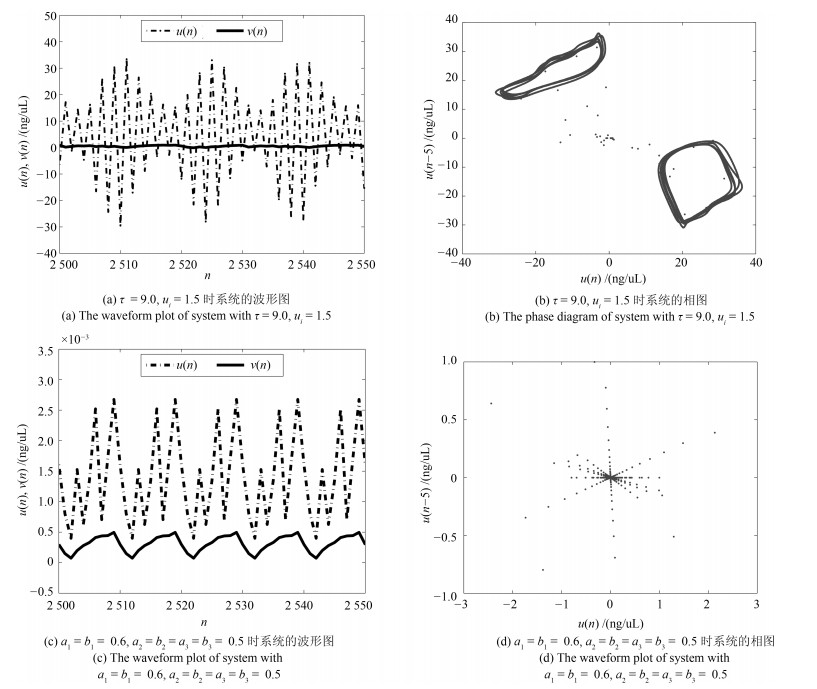
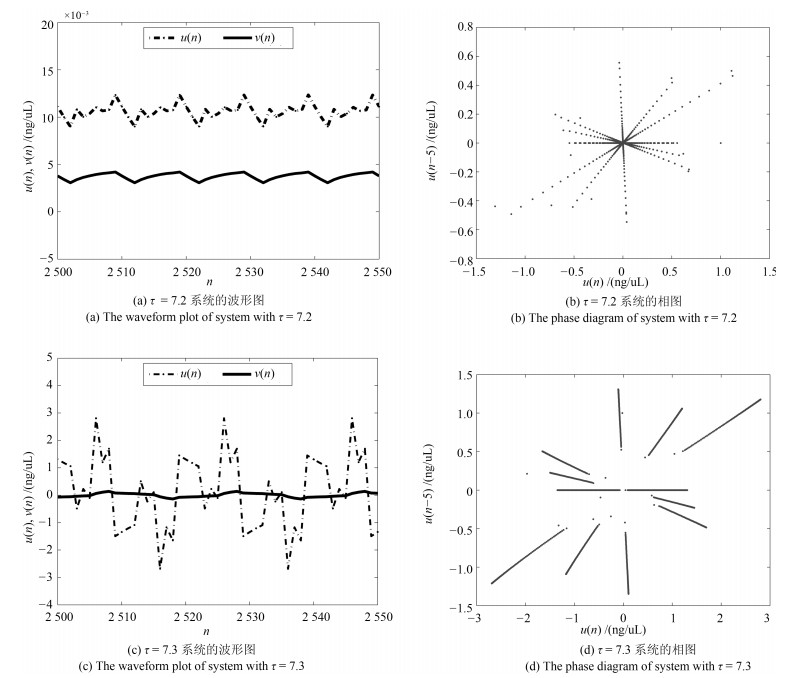
图 3 传统脉冲控制镇定系统的分岔
Fig. 3 Conventional impulsive control the Neimark-Sacker bifurcation
-
[1] Lakshmikantham V, Bainov D D, Simeonov P S. Theory of Impulsive Differential Equations. Singapore: World Scientific, 1989. [2] Yang X S, Lam J, Ho D W C, Feng Z G. Fixed-time synchronization of complex networks with impulsive effects via nonchattering control. IEEE Transactions on Automatic Control, 2017, 62(11): 5511-5521 doi: 10.1109/TAC.2017.2691303 [3] Rakkiyappan R, Velmurugan G, George J N, Selvamani R. Exponential synchronization of Lur'e complex dynamical networks with uncertain inner coupling and pinning impulsive control. Applied Mathematics and Computation, 2017, 307: 217-231 doi: 10.1016/j.amc.2017.02.041 [4] Zhu Q X, Song B. Exponential stability of impulsive nonlinear stochastic differential equations with mixed delays. Nonlinear Analysis: Real World Applications, 2011, 12(5): 2851-2860 doi: 10.1016/j.nonrwa.2011.04.011 [5] Long S J, Xu D Y. Global exponential stability of non-autonomous cellular neural networks with impulses and time-varying delays. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(6): 1463-1472 doi: 10.1016/j.cnsns.2012.10.015 [6] 苏晓明, 张品, 祝君宇.广义时变脉冲系统的时域稳定.自动化学报, 2016, 42(2): 309-314 doi: 10.16383/j.aas.2016.c150284Su Xiao-Ming, Zhang Pin, Zhu Jun-Yu. Finite-time stability of linear time-varying descriptor impulse systems. Acta Automatica Sinica, 2016, 42(2): 309-314 doi: 10.16383/j.aas.2016.c150284 [7] Yang T. Impulsive Control Theory. Berlin, Heidelberg: Springer-Verlag, 2001. [8] Zhang L, Yang X S, Xu C, Feng J W. Exponential synchronization of complex-valued complex networks with time-varying delays and stochastic perturbations via time-delayed impulsive control. Applied Mathematics and Computation, 2017, 306: 22-30 doi: 10.1016/j.amc.2017.02.004 [9] Ai Z D, Chen C C. Asymptotic stability analysis and design of nonlinear impulsive control systems. Nonlinear Analysis: Hybrid Systems, 2017, 24: 244-252 doi: 10.1016/j.nahs.2016.10.003 [10] Jiang X W, Ding L, Guan Z H, Yuan F S. Bifurcation and chaotic behavior of a discrete-time Ricardo-Malthus model. Nonlinear Dynamics, 2013, 71(3): 437-446 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=153d7e803be74d253e30d2512aba68d0 [11] Yue D D, Guan Z H, Chen J, Ling G, Wu Y H. Bifurcations and chaos of a discrete-time model in genetic regulatory networks. Nonlinear Dynamics, 2017, 87(1): 567-586 doi: 10.1007/s11071-016-3061-1 [12] Cao J Z, Jiang H J. Hopf bifurcation analysis for a model of single genetic negative feedback autoregulatory system with delay. Neurocomputing, 2013, 99: 381-389 doi: 10.1016/j.neucom.2012.07.021 [13] Ouannas A, Odibat Z, Shawagfeh N, Alsaedi A, Ahmad B. Universal chaos synchronization control laws for general quadratic discrete systems. Applied Mathematical Modelling, 2017, 45: 636-641 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7d376a18122845cc7edb70f1ef7a9473 [14] Salman S M, Yousef A M, Elsadany A A. Stability, bifurcation analysis and chaos control of a discrete predator-prey system with square root functional response. Chaos, Solitons and Fractals, 2016, 93: 20-31 doi: 10.1016/j.chaos.2016.09.020 [15] Din Q. Global stability and Neimark-Sacker bifurcation of a host-parasitoid model. International Journal of Systems Science, 2017, 48(6): 1194-1202 doi: 10.1080/00207721.2016.1244308 [16] 刘峰.基于脉冲控制的分叉与混沌系统研究[博士学位论文], 华中科技大学, 中国, 2008Liu Feng. Study on Bifurcation and Chaos System with Impulsive Control [Ph.D. dissertation], Huazhong University of Science and Technology, China, 2008 [17] Zhang Y, Sun J T, Feng G. Impulsive control of discrete systems with time delay. IEEE Transactions on Automatic Control, 2009, 54(4): 830-834 http://d.old.wanfangdata.com.cn/Periodical/xtkxysx201801009 [18] Wu S C, Li C D, Liao X F, Duan S K. Exponential stability of impulsive discrete systems with time delay and applications in stochastic neural networks: a Razumikhin approach. Neurocomputing, 2012, 82: 29-36 doi: 10.1016/j.neucom.2011.09.029 [19] Liu F, Guan Z H, Wang H O, Li Y Q. Impulsive control of bifurcations. Mathematics and Computers in Simulation, 2009, 79(7): 2180-2191 doi: 10.1016/j.matcom.2008.12.003 [20] Zheng Y A, Nian Y B, Liu Z R. Impulsive control for the stabilization of discrete chaotic system. Chinese Physics Letters, 2002, 19(9): 1251-1253 doi: 10.1088/0256-307X/19/9/310 [21] Liu F, Yin X, Zhang Z, Sun F L. Stability and neimark-sacker bifurcation analysis in a genetic network with delay. Journal of Advanced Computational Intelligence and Intelligent Informatics, 2017, 21(2): 278-283 doi: 10.20965/jaciii.2017.p0278 -

 下载:
下载:
 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 2138
- HTML全文浏览量: 638
- PDF下载量: 217
- 被引次数: 0
