

-
摘要: 为解决机器人动力学模型未知问题并提升系统鲁棒性,本文基于扰动观测器,考虑动力学模型未知的情况,设计了一种自适应神经网络(Neural network,NN)跟踪控制器.首先分析了机器人运动学和动力学模型,针对模型已知的情况,提出了刚体机械臂通用模型跟踪控制策略;在考虑动力学模型未知的情况下,利用径向基函数(Radial basis function,RBF)神经网络设计基于全状态反馈的自适应神经网络跟踪控制器,并通过设计扰动观测器补偿系统中的未知扰动.利用李雅普诺夫理论证明所提出的控制策略可以使闭环系统误差信号半全局一致有界(Semi-globally uniformly bounded,SGUB),并通过选择合适的增益参数可以将跟踪误差收敛到零域.仿真结果证明所提出算法的有效性并且所提出的控制器在Baxter机器人平台上得到了实验验证.Abstract: For solving uncertainties of robotic dynamics and improving system robustness, an adaptive neural network (NN) tracking control is proposed considering uncertainties of robotic dynamics. Firstly, the kinematic model and dynamic model of robots are addressed. When the dynamics of the robots are known, a model-based tracking control strategy is proposed. Then, considering that the robotic dynamics are unknown, an adaptive radial basis function (RBF) neural network tracking control is proposed based on full state feedback to solve uncertainties. Disturbance observer is designed to counteract to unknown disturbance. By utilizing the Lyapunov direct method and the back-stepping method, all error signals are shown to be semi-globally uniformly bounded (SGUB). By choosing proper parameters, the tracking error can converge to a small neighborhood of zero. Simulation results and experiment results on Baxter robot are carried out to show the effectiveness of proposed method.1) 本文责任编委 魏庆来
-
图 1 3旋转关节自由度机器人Robotic toolbox中的模型
Fig. 1 Model of 3 revolute joint robot in robotic toolbox
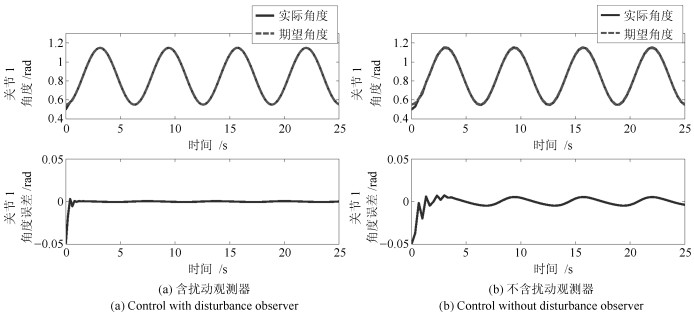
图 6 关节1含扰动观测器和不加扰动观测器角度跟踪控制
Fig. 6 Joint 1 angle tracking control with and without disturbance observer
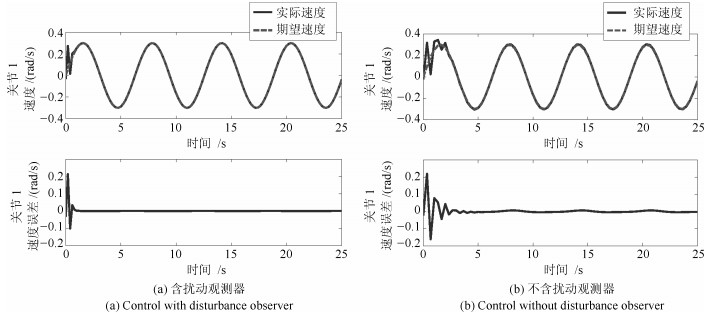
图 7 关节1含扰动观测器和不加扰动观测器速度跟踪控制
Fig. 7 Joint 1 velocity tracking control with and without disturbance observer
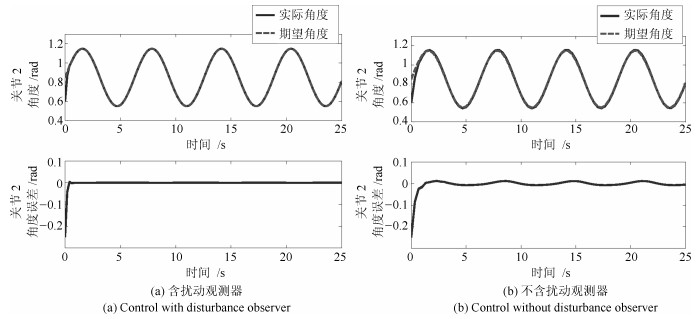
图 8 关节2含扰动观测器和不加扰动观测器角度跟踪控制
Fig. 8 Joint 2 angle tracking control with and without disturbance observer
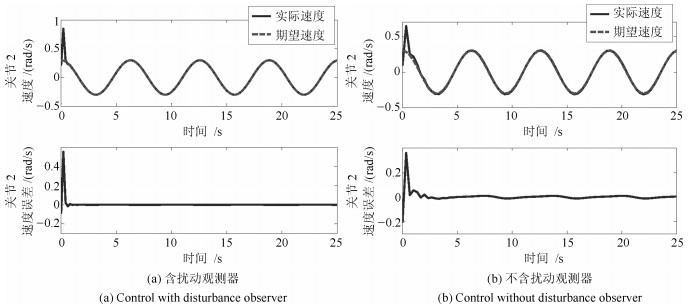
图 9 关节2含扰动观测器和不加扰动观测器速度跟踪控制
Fig. 9 Joint 2 velocity tracking control with and without disturbance observer
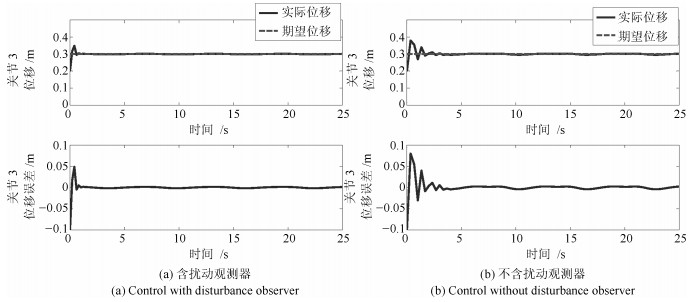
图 10 关节3含扰动观测器和不加扰动观测器角度跟踪控制
Fig. 10 Joint 3 angle tracking control with and without disturbance observer
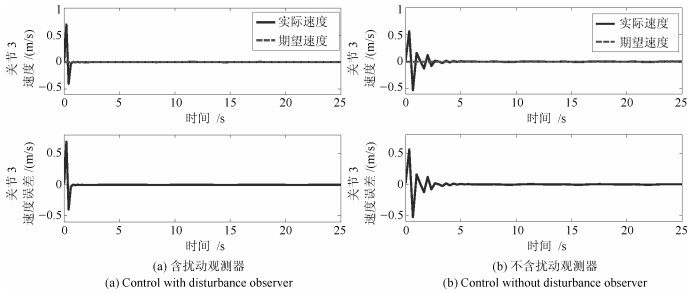
图 11 关节3含扰动观测器和不加扰动观测器速度跟踪控制
Fig. 11 Joint 3 velocity tracking control with and without disturbance observer
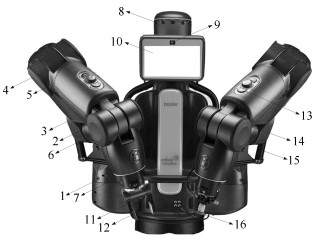
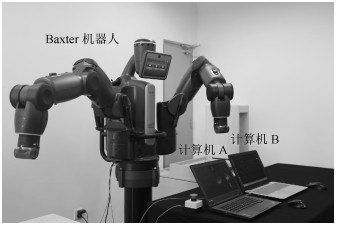
图 16 机器人系统结构: 1.肩$S_0$关节; 2.肩$S_1$关节; 3.肘$E_0$关节; 4.肘$E_1$关节; 5.腕$W_0$关节; 6.腕$W_1$关节; 7.腕$W_2$关节; 8.声纳传感器; 9.面部摄像头; 10.显示屏; 11.末端摄像头; 12.末端抓手; 13.操作旋钮; 14.柔性关节; 15.肩关节支撑弹簧; 16.吸盘
Fig. 16 The system structure of Baxter robot: 1. shoulder joint $S_0$; 2. shoulder joint $S_1$; 3. elbow joint $E_0$; 4. elbow joint $E_1$; 5. wrist joint $W_0$; 6. wrist joint $W_1$; 7. wrist joint $W_2$; 8. sonar sensor; 9. facial camera; 10. screen; 11. end-effector camera; 12. gripper; 13. operating knob; 14. flexible joint; 15. $S_1$ shoulder support spring; 16. sucker
表 1 Baxter机器人D-H参数和连杆质量
Table 1 D-H parameter and link mass of Baxter robot
Link $\theta$ $d$ (m) $a$ (m) $\alpha$ (rad) $m$ (kg) 1 $\theta_1$ 0.2703 0.069 $-\frac{\pi}{2}$ 5.70044 2 $\theta_2$ 0 0 $\frac{\pi}{2}$ 3.22698 3 $\theta_3$ 0.3644 0.069 $-\frac{\pi}{2}$ 4.31272 4 $\theta_4$ 0 0 $\frac{\pi}{2}$ 2.07206 5 $\theta_5$ 0.3743 0.01 $-\frac{\pi}{2}$ 2.24665 6 $\theta_6$ 0 0 $\frac{\pi}{2}$ 1.60979 7 $\theta_7$ 0.2295 0 0 0.54218  下载: 导出CSV
下载: 导出CSV
表 2 Baxter机器人PD控制参数
Table 2 PD control parameter of Baxter robot
Joint P D $S_0$ 50.01 2.5 $S_1$ 60 1.3 $E_0$ 15.1 2.5 $E_1$ 14 3 $W_0$ 25.2 3 $W_1$ 12 10 $W_2$ 12.3 10
下载: 导出CSV
-
[1] He W, Li Z J, Chen C L P. A survey of human-centered intelligent robots:issues and challenges. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):602-609 doi: 10.1109/JAS.2017.7510604 [2] Li Y N, Ge S S. Human-robot collaboration based on motion intention estimation. IEEE/ASME Transactions on Mechatronics, 2014, 19(3):1007-1014 doi: 10.1109/TMECH.2013.2264533 [3] Li H Y, Chen Z R, Wu L G, Lam H-K. Event-triggered control for nonlinear systems under unreliable communication links. IEEE Transactions on Fuzzy Systems, 2017, 25(4):813-824 doi: 10.1109/TFUZZ.2016.2578346 [4] 侯增广, 赵新刚, 程龙, 王启宁, 王卫群.康复机器人与智能辅助系统的研究进展.自动化学报, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtmlHou Zeng-Guang, Zhao Xin-Gang, Cheng Long, Wang Qi-Ning, Wang Wei-Qun. Recent advances in rehabilitation robots and intelligent assistance systems. Acta Automatica Sinica, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtml [5] 贺威, 丁施强, 孙长银.扑翼飞行器的建模与控制研究进展.自动化学报, 2017, 43(5):685-696 http://www.aas.net.cn/CN/abstract/abstract19047.shtmlHe Wei, Ding Shi-Qiang, Sun Chang-Yin. Research progress on modeling and control of flapping-wing air vehicles. Acta Automatica Sinica, 2017, 43(5):685-696 http://www.aas.net.cn/CN/abstract/abstract19047.shtml [6] 魏庆来, 张化光, 刘德荣, 赵琰.基于自适应动态规划的一类带有时滞的离散时间非线性系统的最优控制策略.自动化学报, 2010, 36(1):121-129 http://www.aas.net.cn/CN/abstract/abstract13638.shtmlWei Qing-Lai, Zhang Hua-Guang, Liu De-Rong, Zhao Yan. An optimal control scheme for a class of discrete-time nonlinear systems with time delays using adaptive dynamic programming. Acta Automatica Sinica, 2010, 36(1):121-129 http://www.aas.net.cn/CN/abstract/abstract13638.shtml [7] Xu B, Shi Z K, Yang C G, Sun F C. Composite neural dynamic surface control of a class of uncertain nonlinear systems in strict-feedback form. IEEE Transactions on Cybernetics, 2014, 44(12):2626-2634 doi: 10.1109/TCYB.2014.2311824 [8] 铁林, 蔡开元, 林岩.双线性系统可控性综述.自动化学报, 2011, 37(9):1040-1049 http://www.aas.net.cn/CN/abstract/abstract17527.shtmlTie Lin, Cai Kai-Yuan, Lin-Yan. A survey on the controllability of bilinear systems. Acta Automatica Sinica, 2011, 37(9):1040-1049 http://www.aas.net.cn/CN/abstract/abstract17527.shtml [9] 沈飞, 曹志强, 徐德, 周超.基于Kane方法的机器海豚动力学建模及速度优化方法.自动化学报, 2012, 38(8):1247-1256 http://www.aas.net.cn/CN/abstract/abstract13554.shtmlShen Fei, Cao Zhi-Qiang, Xu De, Zhou Chao. A dynamic model of robotic dolphin based on Kane method and its speed optimization method. Acta Automatica Sinica, 2012, 38(8):1247-1256 http://www.aas.net.cn/CN/abstract/abstract13554.shtml [10] Modares H, Ranatunga I, Lewis F L, Popa D O. Optimized assistive human-robot interaction using reinforcement learning. IEEE Transactions on Cybernetics, 2016, 46(3):655-667 doi: 10.1109/TCYB.2015.2412554 [11] 孙富春, 孙增圻, 张钹.基于观测器的机械手神经网络自适应控制.自动化学报, 1999, 25(3):295-302 http://www.aas.net.cn/CN/abstract/abstract16725.shtmlSun Fu-Chun, Sun Zeng-Qi, Zhang Bo. Observer-based adaptive control for robot trajectory tracking using neural networks. Acta Automatica Sinica, 1999, 25(3):295-302 http://www.aas.net.cn/CN/abstract/abstract16725.shtml [12] Li Y N, Ge S S. Impedance learning for robots interacting with unknown environments. IEEE Transactions on Control Systems Technology, 2014, 22(4):1422-1432 doi: 10.1109/TCST.2013.2286194 [13] He W, Dong Y T. Adaptive fuzzy neural network control for a constrained robot using impedance learning. IEEE Transactions on Neural Networks and Learning Systems, 2017, 29(4):1174-1186 [14] De Santis A, Siciliano B, De Luca A, Bicchi A. An atlas of physical human-robot interaction. Mechanism and Machine Theory, 2008, 43(3):253-270 doi: 10.1016/j.mechmachtheory.2007.03.003 [15] Liu Y J, Tong S C, Li D J, Gao Y. Fuzzy adaptive control with state observer for a class of nonlinear discrete-time systems with input constraint. IEEE Transactions on Fuzzy Systems, 2016, 24(5):1147-1158 doi: 10.1109/TFUZZ.2015.2505088 [16] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP:parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1):1-5 doi: 10.1109/JAS.2017.7510310 [17] Tong S C, Wang T, Li Y M, Chen B. A combined backstepping and stochastic small-gain approach to robust adaptive fuzzy output feedback control. IEEE Transactions on Fuzzy Systems, 2013, 21(2):314-327 doi: 10.1109/TFUZZ.2012.2213260 [18] Liu Y J, Tong S C. Adaptive NN tracking control of uncertain nonlinear discrete-time systems with nonaffine dead-zone input. IEEE Transactions on Cybernetics, 2015, 45(3):497-505 doi: 10.1109/TCYB.2014.2329495 [19] Chen C L P, Wen G X, Liu Y J, Wang F Y. Adaptive consensus control for a class of nonlinear multiagent time-delay systems using neural networks. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(6):1217-1226 doi: 10.1109/TNNLS.5962385 [20] 韩红桂, 乔俊飞, 薄迎春.基于信息强度的RBF神经网络结构设计研究.自动化学报, 2012, 38(7):1083-1090 http://www.aas.net.cn/CN/abstract/abstract13727.shtmlHan Hong-Gui, Qiao Jun-Fei, Bo Ying-Chun. On structure design for RBF neural network based on information strength. Acta Automatica Sinica, 2012, 38(7):1083-1090 http://www.aas.net.cn/CN/abstract/abstract13727.shtml [21] Ding S B, Wang Z S, Zhang H G. Event-triggered stabilization of neural networks with time-varying switching gains and input saturation. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(10):5045-5056 doi: 10.1109/TNNLS.2017.2787642 [22] Narendra K S, Parthasarathy K. Identification and control of dynamical systems using neural networks. IEEE Transactions on Neural Networks, 1990, 1(1):4-27 doi: 10.1109/72.80202 [23] Yang C G, Jiang Y M, Li Z J, He W, Su C Y. Neural control of bimanual robots with guaranteed global stability and motion precision. IEEE Transactions on Industrial Informatics, 2017, 13(3):1162-1171 doi: 10.1109/TII.2016.2612646 [24] He W, Dong Y T, Sun C Y. Adaptive neural impedance control of a robotic manipulator with input saturation. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 46(3):334-344 doi: 10.1109/TSMC.2015.2429555 [25] Li Z J, Ge S S, Ming A G. Adaptive robust motion/force control of holonomic-constrained nonholonomic mobile manipulators. IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics), 2007, 37(3):607-616 doi: 10.1109/TSMCB.2006.888661 [26] Li Z J, Su C Y, Wang L Y, Chen Z T, Chai T Y. Nonlinear disturbance observer-based control design for a robotic exoskeleton incorporating fuzzy approximation. IEEE Transactions on Industrial Electronics, 2015, 62(9):5763-5775 doi: 10.1109/TIE.2015.2447498 [27] Chen M. Robust tracking control for self-balancing mobile robots using disturbance observer. IEEE/CAA Journal of Automatica Sinica, 2017, 4(3):458-465 doi: 10.1109/JAS.2017.7510544 [28] Fu Z J, Xie W F, Rakheja S, Na J. Observer-based adaptive optimal control for unknown singularly perturbed nonlinear systems with input constraints. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1):48-57 doi: 10.1109/JAS.2017.7510322 [29] Li H Y, Shi P, Yao D Y, Wu L G. Observer-based adaptive sliding mode control for nonlinear markovian jump systems, Automatica, 2016, 64:133-142 doi: 10.1016/j.automatica.2015.11.007 [30] Xu B. Disturbance observer-based dynamic surface control of transport aircraft with continuous heavy cargo airdrop. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 47(1):161-170 doi: 10.1109/TSMC.2016.2558098 [31] Chen W H, Ballance D J, Gawthrop P J, O'Reilly J. A nonlinear disturbance observer for robotic manipulators. IEEE Transactions on Industrial Electronics, 2000, 47(4):932-938 doi: 10.1109/41.857974 [32] Yang J, Li S H, Yu X H. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Transactions on Industrial Electronics, 2013, 60(1):160-169 doi: 10.1109/TIE.2012.2183841 [33] Chen M, Ge S S. Adaptive neural output feedback control of uncertain nonlinear systems with unknown hysteresis using disturbance observer. IEEE Transactions on Industrial Electronics, 2015, 62(12):7706-7716 doi: 10.1109/TIE.2015.2455053 [34] Li Y N, Yang C G, Ge S S, Lee T H. Adaptive output feedback NN control of a class of discrete-time MIMO nonlinear systems with unknown control directions. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(2):507-517 doi: 10.1109/TSMCB.2010.2065223 [35] Ge S S, Wang C. Adaptive neural control of uncertain MIMO nonlinear systems. IEEE Transactions on Neural Networks, 2004, 15(3):674-692 doi: 10.1109/TNN.2004.826130 [36] Ju Z F, Yang C G, Ma H B. Kinematics modeling and experimental verification of baxter robot. In: Proceedings of the 33rd Chinese Control Conference (CCC). Nanjing, China: IEEE, 2014. 8518-8523 [37] Yang C G, Ganesh G, Haddadin S, Parusel S, Albu-Schaeffer A, Burdet E. Human-like adaptation of force and impedance in stable and unstable interactions. IEEE Transactions on Robotics, 2011, 27(5):918-930 doi: 10.1109/TRO.2011.2158251 [38] Yang C G, Wang X Y, Cheng L, Ma H B. Neural-learning-based telerobot control with guaranteed performance. IEEE Transactions on Cybernetics, 2017, 47(10):3148-3159 doi: 10.1109/TCYB.6221036 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 3295
- HTML全文浏览量: 796
- PDF下载量: 1468
- 被引次数: 0
