

Finite-time Standoff Tracking Control of Moving Target by Means of Backstepping for Non-holonmic Robot
-
摘要: 以二维运动目标的环航跟踪为背景,在非完整机器人速度受限情形下,设计了一类以规定环绕速率沿固定半径跟踪目标的控制器.首先,由极坐标系下的环航系统模型,利用反步法给出了一种使系统达到渐近稳定的控制器.进一步,考虑机器人在有限时间内达到跟踪要求的工程需求,利用饱和函数和Lyapunov稳定性理论,设计了一种使机器人运动轨迹在有限时间内收敛到期望轨迹的有限时间饱和控制器.最后,数值算例验证了所提控制律的有效性.Abstract: To realize the standoff tracking of a moving target with the prescribed radius and circular velocity, this paper presents the control strategies that enable the trajectory of non-holonomic robot to converge to the desired circule with speed constraints. A controller in the polar coordinate system is proposed by means of the backstepping technique, which realizes the asymptotic convergence of the desired motion trajectory. Then, by using the finite-time Lyapunov stability theorem and saturated function, a control law is developed to ensure both relative distance and circular velocity convergences to the prescribed values in a finite time. Finally, simulation results verify the effectiveness of the proposed control laws.
-
Key words:
- Standoff tracking /
- non-holonomic robot /
- backstepping /
- input saturation /
- finite-time stability
1) 本文责任编委 朱纪洪 -
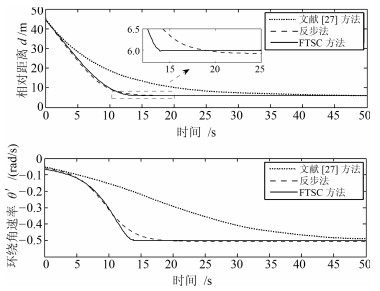
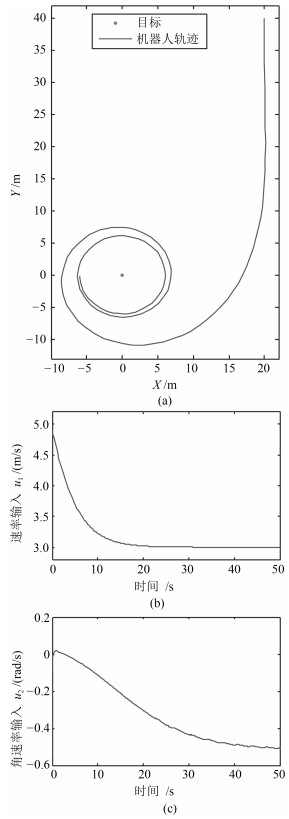
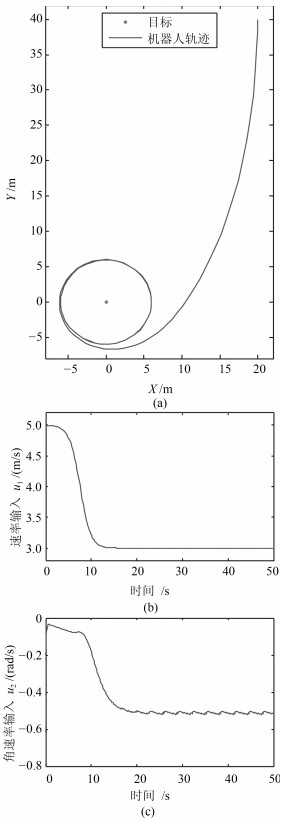
图 5 三种控制方法对静止目标的环航跟踪结果对比
Fig. 5 Standoff tracking a static target with different control strategies
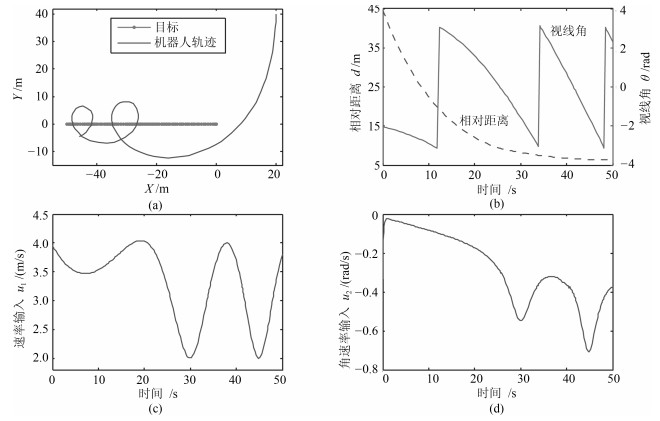
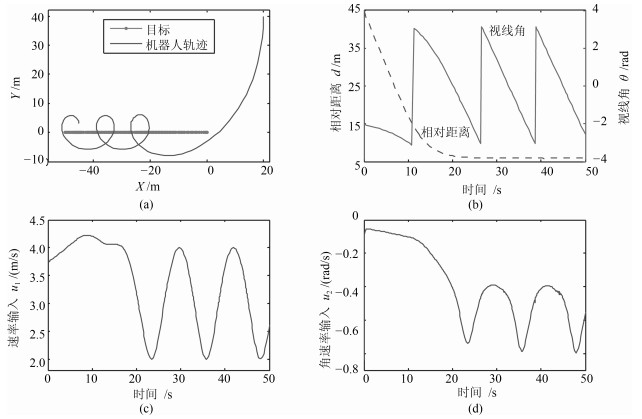
图 7 反步法对匀速目标的环航跟踪
Fig. 7 Standoff tracking a constant velocity target using backstepping
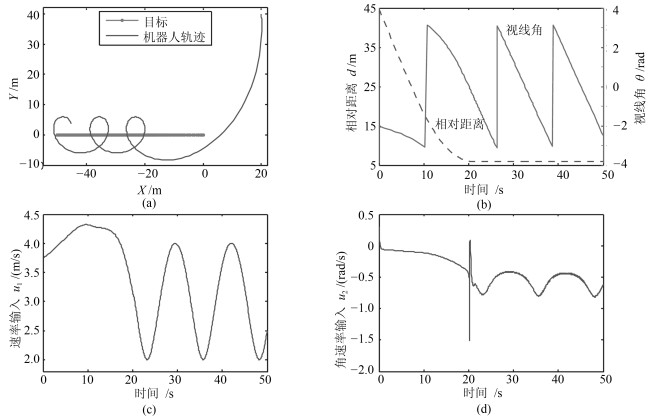
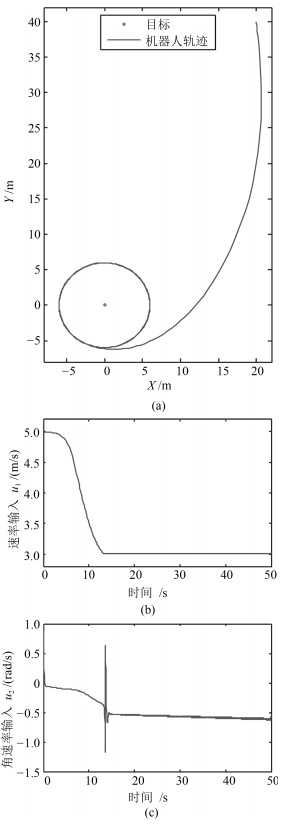
图 8 有限时间饱和控制方法对匀速目标的环航跟踪
Fig. 8 Standoff tracking a constant velocity target using FTSC
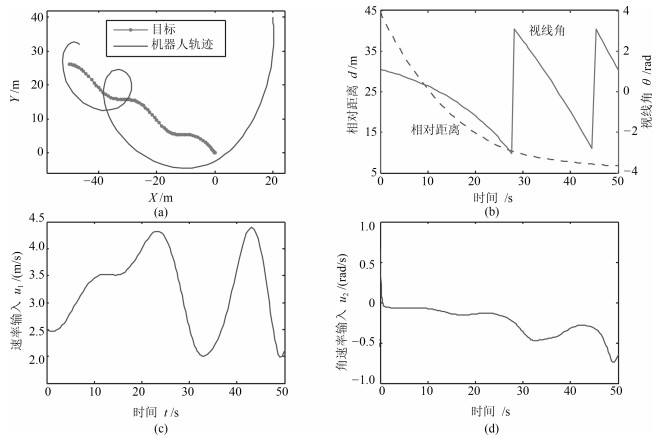
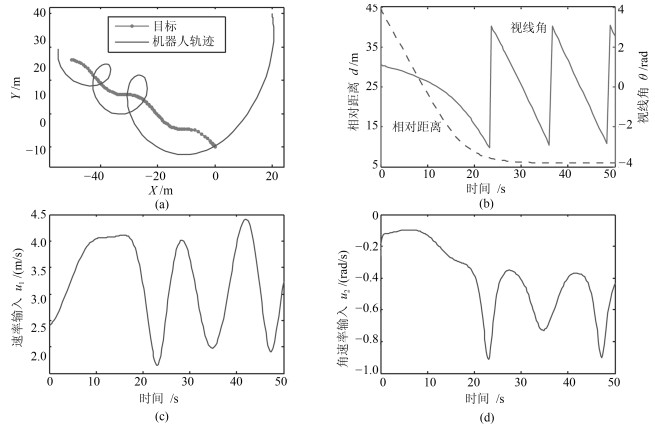
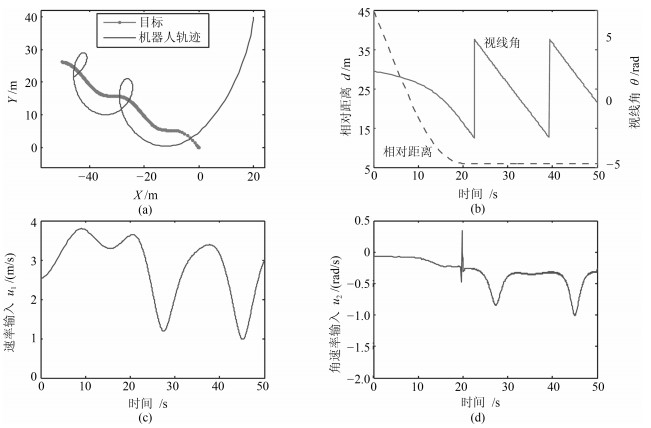
图 10 反步法对变速目标的环航跟踪
Fig. 10 Standoff tracking a time-varying velocity target using backstepping
-
[1] Deghat M, Shames I, Anderson B D O, Yu C B. Localization and circumnavigation of a slowly moving target using bearing measurements. IEEE Transactions on Automatic Control, 2014, 59(8):2182-2188 doi: 10.1109/TAC.2014.2299011 [2] Deghat M, Xia L, Anderson B, Hong Y G. Multi-target localization and circumnavigation by a single agent using bearing measurements. International Journal of Robust and Nonlinear Control, 2015, 25(14):2362-2374 doi: 10.1002/rnc.v25.14 [3] Shames I, Dasgupta S, Fidan B, Anderson B D O. Circumnavigation using distance measurements under slow drift. IEEE Transactions on Automatic Control, 2012, 57(4):889-903 doi: 10.1109/TAC.2011.2173417 [4] Boccia A, Adaldo A, Dimarogonas D V, Bernardo M D, Johansson K. H. Tracking a mobile target by multi-robot circumnavigation using bearing measurements. In: Proceedings of the 56th IEEE Conference on Decision and Control. Melbourne, Australia: IEEE, 2017. 1076-1081 [5] 莫立坡, 于永光.多智能体系统的有限时间旋转环绕控制.自动化学报, 2017, 43(9):1665-1672 http://www.aas.net.cn/CN/abstract/abstract19143.shtmlMo Li-Po, Yu Yong-Guang. Finite-time rotating encirclement control of multi-agent systems. Acta Automatica Sinica, 2017, 43(9):1665-1672 http://www.aas.net.cn/CN/abstract/abstract19143.shtml [6] 张春燕, 戚国庆, 李银伢, 盛安冬.一种基于有限时间稳定的环绕控制器设计.自动化学报, 2018, 44(11):2056-2067 http://www.aas.net.cn/CN/abstract/abstract19387.shtmlZhang Chun-Yan, Qi Guo-Qing, Li Yin-Ya, Sheng An-Dong. Standoff tracking control of moving target with finite-time stabilization. Acta Automatica Sinica, 2018, 44(11):2056-2067 http://www.aas.net.cn/CN/abstract/abstract19387.shtml [7] Park S. Guidance law for standoff tracking of a moving object. Journal of Guidance, Control, and Dynamics, 2017, 40(11):2948-2955 doi: 10.2514/1.G002707 [8] Deghat M, Davis E, See T, Shames I, Anderson, B D O, Yu C B. Target localization and circumnavigation by a non-holonomic robot. In: Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura, Algarve, Portugal: IEEE, 2012. 1227-1232 [9] Matveev A S, Semakova A A, Savkin A V. Range-only based circumnavigation of a group of moving targets by a non-holonomic mobile robot. Automatica, 2016, 65:76-89 doi: 10.1016/j.automatica.2015.11.032 [10] Milutinović D, Casbeer D, Cao Y C, Kingston D. Coordinate frame free dubins vehicle circumnavigation using only range-based measurements. International Journal of Robust and Nonlinear Control, 2017, 27(16):2937-2960 doi: 10.1002/rnc.v27.16 [11] Matveev A S, Semakova A A, Savkin A V. Tight circumnavigation of multiple moving targets based on a new method of tracking environmental boundaries. Automatica, 2017, 79:52-60 doi: 10.1016/j.automatica.2017.01.041 [12] Cao Y C. UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements. Automatica, 2015, 55:150-158 doi: 10.1016/j.automatica.2015.03.007 [13] 张民, 田鹏飞, 陈欣.一种无人机定距盘旋跟踪制导律及稳定性证明.航空学报, 2016, 37(11):3425-3434 http://d.old.wanfangdata.com.cn/Periodical/hkxb201611020Zhang Min, Tian Peng-Fei, Chen Xin. UAV guidance law for circumnavigating and tracking ground target and its stability proof. Acta Aeronautica et Astronautica Sinica, 2016, 37(11):3425-3434 http://d.old.wanfangdata.com.cn/Periodical/hkxb201611020 [14] Lawrence D A. Lyapunov vector fields for UAV flock coordination. In: Proceedings of the 2nd AIAA Unmanned Unlimited Conference, Workshop, & Exhibit. San Diego, California: AIAA, 2003. [15] Chen H D, Chang K C, Agate C S. UAV path planning with tangent-plus-Lyapunov vector field guidance and obstacle avoidance. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2):840-856 doi: 10.1109/TAES.2013.6494384 [16] Frew E W, Lawrence D A, Morris S. Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields. Journal of Guidance, Control, and Dynamics, 2008, 31(2):290-306 doi: 10.2514/1.30507 [17] Zhu S Q, Wang D W, Low C B. Ground target tracking using UAV with input constraints. Journal of Intelligent & Robotic Systems, 2013, 69(1-4):417-429 [18] Oh H, Turchi D, Kim S, Tsourdos A, Pollini L, White B. Coordinated standoff tracking using path shaping for multiple UAVs. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1):348-363 doi: 10.1109/TAES.2013.110712 [19] Xiong J, Niu Y F. Guidance law for multi-UAVs collaborative ground target tracking under obstacle environment. In: Proceedings of the 29th Chinese Control and Decision Conference (CCDC). Chongqing, China: IEEE, 2017. 7219-7223 [20] Zheng R H, Lin Z Y, Fu M Y, Sun D. Distributed control for uniform circumnavigation of ring-coupled unicycles. Automatica, 2015, 53:23-29 doi: 10.1016/j.automatica.2014.11.012 [21] Yu X, Liu L. Cooperative control for moving-target circular formation of nonholonomic vehicles. IEEE Transactions on Automatic Control, 2017, 62(7):3448-3454 doi: 10.1109/TAC.2016.2614348 [22] Summers T H, Akella M R, Mears M J. Coordinated standoff tracking of moving targets:control laws and information architectures. Journal of Guidance, Control, and Dynamics, 2009, 32(1):56-69 doi: 10.2514/1.37212 [23] Oh H, Kim S, Tsourdos A, White B A. Decentralised standoff tracking of moving targets using adaptive sliding mode control for UAVs. Journal of Intelligent & Robotic Systems, 2014, 76(1):169-183 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=8d3519f32dc4f16364eab42f8f48a4a5 [24] Oh H, Kim S, Tsourdos A. Road-map-assisted standoff tracking of moving ground vehicle using nonlinear model predictive control. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2):975-986 doi: 10.1109/TAES.2014.130688 [25] Yu X, Liu L. Distributed circular formation control of ring-networked nonholonomic vehicles. Automatica, 2016, 68:92-99 doi: 10.1016/j.automatica.2016.01.056 [26] Arranz L B, Seuret A, De Wit C C. Translation control of a fleet circular formation of AUVs under finite communication range. In: Proceedings of the 48th IEEE Conference on Decision and Control, Held Jointly With the 28th Chinese Control Conference. Shanghai, China: IEEE, 2009. 8345-8350 [27] Miao Z Q, Wang Y N, Fierro R. Cooperative circumnavigation of a moving target with multiple nonholonomic robots using backstepping design. Systems & Control Letters, 2017, 103:58-65 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a4ab10154fe6cfd41dd6386784d05da7 [28] 杨晨, 程盈盈, 都海波, 王金平, 何怡刚. Buck型变换器自适应有限时间降压控制算法研究.自动化学报, 2016, 42(2):315-320 http://www.aas.net.cn/CN/abstract/abstract18821.shtmlYang Chen, Cheng Ying-Ying, Du Hai-Bo, Wang Jin-Ping, He Yi-Gang. An adaptive finite-time control algorithm for buck converter systems. Acta Automatica Sinica, 2016, 42(2):315-320 http://www.aas.net.cn/CN/abstract/abstract18821.shtml [29] 周映江, 王莉, 孙长银.一类非线性系统的全局渐近稳定和有限时间镇定.自动化学报, 2013, 39(5):664-672 http://www.aas.net.cn/CN/abstract/abstract17924.shtmlZhou Ying-Jiang, Wang Li, Sun Chang-Yin. Global asymptotic and finite-time stability for nonlinear systems. Acta Automatica Sinica, 2013, 39(5):664-672 http://www.aas.net.cn/CN/abstract/abstract17924.shtml [30] 丁世宏, 李世华.输入饱和下的非线性积分系统的全局有限时间镇定.自动化学报, 2011, 37(10):1222-1231 http://www.aas.net.cn/CN/abstract/abstract17611.shtmlDing Shi-Hong, Li Shi-Hua. Global finite-time stabilization of nonlinear integrator systems subject to input saturation. Acta Automatica Sinica, 2011, 37(10):1222-1231 http://www.aas.net.cn/CN/abstract/abstract17611.shtml [31] Polyanin A D, Manzhirov A V. Handbook of Mathematics for Engineers and Scientists. Boca Raton:CRC Press, 2006. [32] Hong Y G. Finite-time stabilization and stabilizability of a class of controllable systems. Systems & Control Letters, 2002, 46(4):231-236 http://cn.bing.com/academic/profile?id=cb6e9460ddaeb0317d5aeae431d087f3&encoded=0&v=paper_preview&mkt=zh-cn [33] Bhat S P, Bernstein D S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Transactions on Automatic Control, 1998, 43(5):678-682 doi: 10.1109/9.668834 [34] Qian C J, Li J. Global output feedback stabilization of upper-triangular nonlinear systems using a homogeneous domination approach. International Journal of Robust and Nonlinear Control, 2006, 16(9):441-463 doi: 10.1002/(ISSN)1099-1239 [35] Khalil H K. Nonlinear Systems (Third Edition). Upper Saddle River, NJ, USA:Prentice Hall, 2002. -

 下载:
下载:
 点击查看大图
点击查看大图
计量
- 文章访问数: 2845
- HTML全文浏览量: 364
- PDF下载量: 605
- 被引次数: 0
