

Distribution of Zero-effort Miss Distance Estimation Errors in Continuous-time Controlled System With Mode Mismatch
-
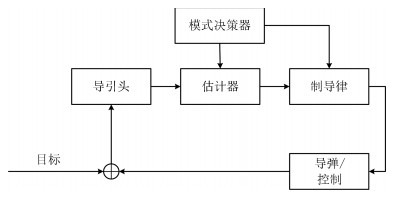
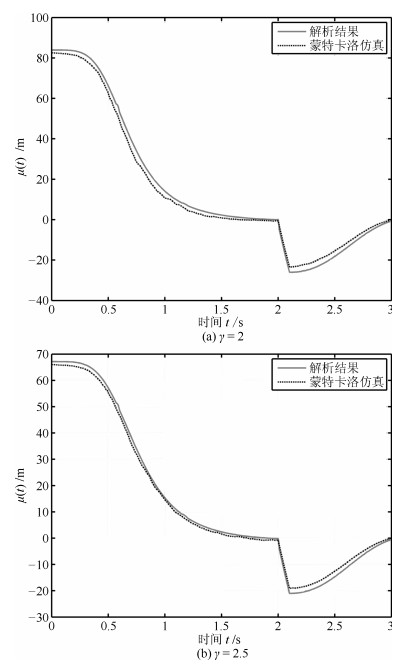
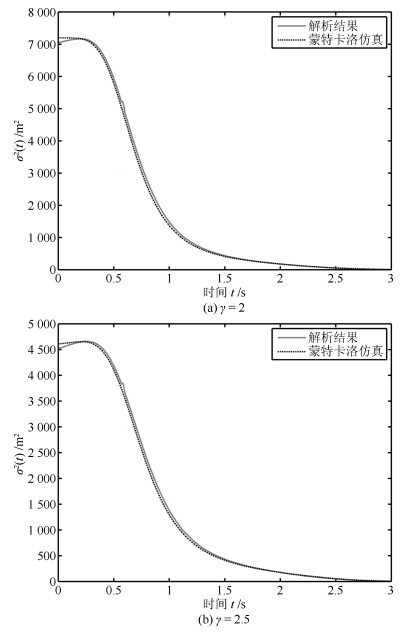
摘要: 针对大机动目标拦截中零控脱靶量(Zero-effort miss distance,ZEM)估计误差分布的求解问题,在线性估计器与独立模式辨识器的配置下,提出了一种解析求解方法.在存在固定的模式辨识延迟下,ZEM的估计误差服从有偏的高斯分布.最后,通过与蒙特卡洛仿真的比较,验证了本文方法的正确性.Abstract: For the problem of solving the error distribution of zero-effort miss distance (ZEM) in highly maneuvering target interception, an analytical approach is proposed for the configuration of a linear estimator and a separate mode decision-maker. In the case of a fixed mode decision delay, the error of ZEM follows a biased Gaussian distribution. Finally, the correctness of the proposed method is verified by comparison with Monte Carlo simulation.1) 本文责任编委 倪茂林
-
表 1 仿真参数
Table 1 Simulation parameters
参数类型 参数名称 单位 值(范围) 弹目参数 ${V_p}$ m/s 2 300 ${V_e}$ m/s 2 700 $a_p^{\max}$ g 30 $a_e^{\max}$ g 12, 15 ${\tau _p}$ s 0.2 ${\tau _e}$ s 0.2 观测参数 T s 0.01 ${\sigma _\theta }$ mrad 5 ${\sigma _a }$ $\rm m/{\rm s}^2$ 1 场景参数 $r_0$ m 15 000 ${\phi_p}(0)$ rad 均匀分布($-\pi /18, \pi /18$) ${\phi_e}(0)$ rad $ > \pi /2$且满足碰撞三角形 ${u _p}(0)$ g 0 ${a_p}(0)$ g 0 ${a_e}(0)$ g $a_e^{\max}$ 目标机动方式 - 随机乒乓 估计器参数 $s_w$ $\rm g^2\rm{/Hz}$ 1 $t_{sw}$ s 2 $\Delta t$ s 0.1 初始状态 - ${{\hat {\pmb x}}_0} = {[0, 0, 0, 0]^{\rm T}}$ 初始估计误差 - ${{\tilde {\pmb x}}_0} = {[0, 0, a_e^{\max}, 0]^{\rm T}}$ 初始估计协方差 - ${{{\tilde P}}_0} = \left[{\begin{array}{*{20}{c}} 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0\\ 0 & 0 &{{{(a_e^{\max})}^2}}& 0\\ 0 & 0 & 0 & 0 \end{array}} \right]$  下载: 导出CSV
下载: 导出CSV
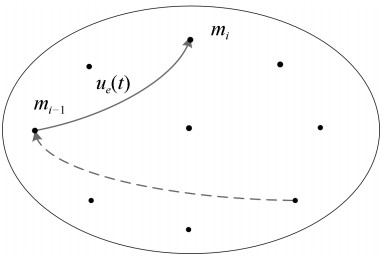
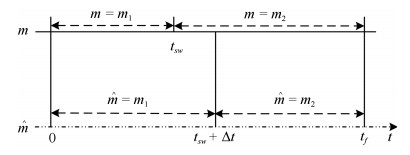
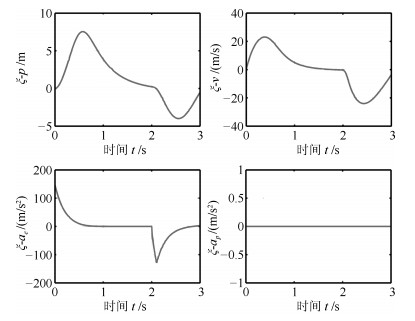
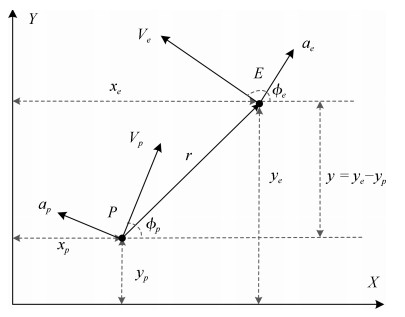
符号说明 $P$ 导弹 $E$ 目标 $\tau_p$, $\tau_e$ 导弹和目标控制系统的时间常数 $a_p^{\max}, a_e^{\max}$ 导弹和目标最大横向加速度 ${V_p}, {V_e}$ 导弹和目标的飞行速度 ${u_p}, {u_e}$ 导弹和目标的横向加速度指令 $r$ 弹目相对距离 ${t_{sw}}$ 目标模式切换时刻 $t$ 仿真时间 ${t_f}$ 终止时刻 g 重力加速度, $9.8\rm m/{\rm{s}^2}$ $m$ 目标的运动模式 ${m_1}, {m_2}$ 目标在模式切换时刻前后的运动模式 $\Delta m$ 目标运动模式改变量, $\Delta m = {m_2} - {m_1}$ $T$ 离散采样时间间隔 ${\sigma _\theta }$ 测角精度 ${\sigma _a}$ 导弹加速度测量精度 ${s_w}$ 目标指令加速度误差的功率谱密度 $\Delta t$ 目标运动模式辨识延迟 ${\tilde {\pmb x}}$ 状态估计误差 ${\pmb \xi }, {\Sigma}$ 状态估计误差的均值和方差 $\eta (t)$ ZEM估计误差 $\mu, {\sigma ^2}$ ZEM估计误差的均值和方差
下载: 导出CSV
-
[1] Shinar J, Turetsky V. Three-dimensional validation of an integrated estimation/guidance algorithm against randomly maneuvering targets. Journal of Guidance, Control, and Dynamics, 2014, 32(3):1034-1039 doi: 10.2514/1.40542 [2] Shinar J, Shima T. Nonorthodox guidance law development approach for intercepting maneuvering targets. Journal of Guidance, Control, and Dynamics, 2002, 25(4):658-666 doi: 10.2514/2.4960 [3] Shinar J, Turetsky V. Meeting the challenges of modern interceptor guidance by non-conventional approaches. In: Proceedings of the 17th Mediterranean Conference on Control and Automation. Thessaloniki, Greece: IEEE, 2009. 1563-1568 http://ieeexplore.ieee.org/document/5164770/ [4] Shinar J, Oshman Y, Turetsky V. On the need for integrated estimation/guidance design for hit-to-kill accuracy. In: Proceedings of the 2003 American Control Conference. Denver, CO, USA: IEEE, 2003, 1: 402-407 [5] Witsenhausen H S. Separation of estimation and control for discrete time system. Proceedings of the IEEE, 1971, 59(11):1557-1566 doi: 10.1109/PROC.1971.8488 [6] Alexandre P. Multiple Model Estimation and Detection for Adaptive Guidance of Hybrid Systems [Master dissertation], McGill University, Canada, 2004. [7] Glizer V Y, Turetsky V, Shinar J. Terminal cost distribution in discrete-time controlled system with disturbance and noise-corrupted state information. International Journal of Applied Mathematics, 2012, 42(1):52-59 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_9728187a2dae195516565edae35386af [8] Shinar J, Glizer V Y, Turetsky V. Distribution of terminal cost functional in continuous-time controlled system with noise-corrupted state information. In: Proceedings of the 27th Convention of Electrical & Electronics Engineers in Israel. Eilat, Israel: IEEE, 2011. 1-5 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=6377008 [9] Shinar J, Glizer V Y, Turetsky V. Terminal state distribution of continuous-time system with random disturbance and noise-corrupted information. International Journal of Applied Mathematics, 2015, 45(2):77-84 [10] Glizer V Y, Turetsky V, Shinar J. Distribution of terminal cost functional in discrete-time controlled system with noise-corrupted state information. In: Proceedings of the 2012 IEEE 27th Convention of Electrical & Electronics Engineers in Israel (IEEEI). London, UK: IEEE, 2012. [11] Moldavskaya E, Shinar J. Distribution of the zero-effort miss distance estimation error in interception problems. Applied Mathematics and Computation, 2015, 269:217-231 doi: 10.1016/j.amc.2015.07.073 [12] Shinar J, Turetsky V, Oshman Y. New logic-based estimation/guidance algorithm for improved homing against randomly maneuvering targets. In: Proceedings of the 2014 AIAA Guidance, Navigation and Control Conference. Providence, Rhode Island: AIAA, 2004. 1-17 doi: 10.2514/6.2004-4886 [13] Dionne D, Michalska H, Shinar J, et al. Decision-directed adaptive estimation and guidance for an interception endgame. Journal of Guidance, Control, and Dynamics, 2015, 29(4):970-980 doi: 10.2514/1.16050 [14] Shinar J, Turetsky V, Oshman Y. Integrated estimation/guidance design approach for improved homing against randomly maneuvering targets. Journal of Guidance, Control, and Dynamics, 2007, 30(1):154-161 doi: 10.2514/1.22916 [15] 范红旗.主动寻的制导中机动目标运动模式辨识技术博士学位论文, 国防科学技术大学, 中国, 2008.Fan Hong-Qi. Technology on Maneuvering Target Motion Mode Identification in Active Homing Guidance [Ph. D. dissertation], National University of Defense Technology, China, 2008. [16] Author(s) Zhu Y L, Fan H Q, Fan J P, Lu Z Q, Fu Q. Target turning maneuver detection using high resolution doppler profile. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 762-779 http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=6129669 [17] Bizup D F, Brown D E. Maneuver detection using the radar range rate measurement. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1):330-336 doi: 10.1109/TAES.2004.1292169 [18] Hughes E J, Leyland M. Target manoeuvre detection using radar glint. Electronics Letters, 1998, 34(17):1695-1696 doi: 10.1049/el:19981188 [19] Fan H Q, Zhu Y L, Fu Q. Impact of mode decision delay on estimation error for maneuvering target interception. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1):702-711 doi: 10.1109/TAES.2011.5705700 [20] Turetsky V, Shinar J. Missile guidance laws based on pursuit-evasion game formulations. Automatica, 2003, 39(4):607-618 doi: 10.1016/S0005-1098(02)00273-X [21] 李运迁, 齐乃明.基于零控脱靶量的大气层内拦截弹制导律.宇航学报, 2010, 31(7):1768-1774 doi: 10.3873/j.issn.1000-1328.2010.07.011Li Yun-Qian, Qi Nai-Ming. A zero-effort miss distance-based guidance law for endoatmoshperic interceptor. Journal of Astronautics, 2010, 31(7):1768-1774 doi: 10.3873/j.issn.1000-1328.2010.07.011 [22] Blair W D, Watson G A, Kirubarajan T, Bar-Shalom Y. Benchmark for radar allocation and tracking in ECM. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(4):1097-1114 doi: 10.1109/7.722694 [23] Li X R, He C. Model-set design, choice, and comparison for multiple-model estimation. In: Proceedings of SPIE 3809 International Symposium on Optical Science, Engineering, and Instrumentation. Denver, CO, USA: SPIE, 1999. 501-513 http://spie.org/x648.xml?product_id=364047 [24] Baram Y, Sandell N. An information theoretic approach to dynamical systems modeling and identification. IEEE Transactions on Automatic Control, 1978, 23(1):61-66 doi: 10.1109/TAC.1978.1101690 -

 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 2071
- HTML全文浏览量: 208
- PDF下载量: 820
- 被引次数: 0
