

An Extraction Algorithm for Motion Parameters of A Laboratory Mouse by Model Matching and Particle Filtering
-
摘要: 实验小鼠是一种变形体对象,现有方法难以从连续视频图像中同时提取出运动轨迹和体态细节.本文采用模板匹配和粒子滤波的目标跟踪方法求解这一问题.提出了一种几何体部件模型,在引入小鼠移动速率的基础上给出了其运动状态方程,以二值化前景像素与几何部件模型间的差异度方程为观测模型,以状态方程及相互独立的多维随机变量为运动模型,从而建立起基本粒子滤波算法.与逐帧差分识别方法的对比实验研究表明,所提出的模型与实验小鼠形体相似,能够达到视频在线提取的计算效率.新方法在强噪声干扰条件下解决了运动轨迹和体态同时精确估计,并有效避免了首尾识别混淆及虚影干扰等困境,从而为后续生物学行为分析提供依据.Abstract: Laboratory mouse is a kind of deformable object. Existing methods can hardly extract motion trajectories and posture details simultaneously from those continuous recorded videos. An object tracking method based on model matching and particle filtering is adopted to solve this problem. A geometry based part model and its motion state function involving moving velocity are proposed. A model-observation difference function is established as the observation model by comparing the foreground pixels in the binary image and the geometry part model. A basic particle filter is built with this observation function and the motion state function with multi-stochastic variables which follow an independent distribution. Comparison is made between the proposed method and the classical frame-differencing method, which proves that the novel part model is analogous with a physical mouse in shape and supports real-time extracting rate and high computing efficiency. The novel method is able to estimate precisely both motion trajectories and posture states, and avoid effectively the faults of head-tail confusion and reflection disturbance. Therefore the novel method provides a trust worthy means for later behavioral analysis for biologists.
-
Key words:
- Object tracking /
- particle filter /
- part model /
- laboratory mouse /
- posture
1) 本文责任编委 吕金虎 -
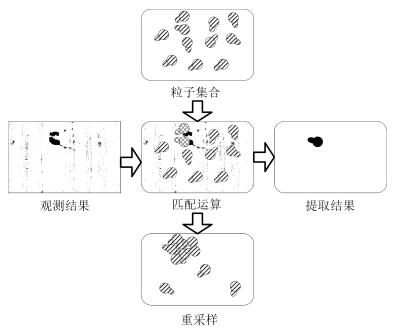
图 1 用于小鼠目标跟踪的模板匹配及粒子滤波方法
Fig. 1 Model matching and particle filtering method applied to the object tracking of a laboratory mouse
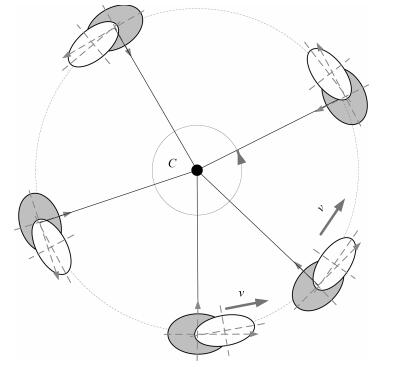
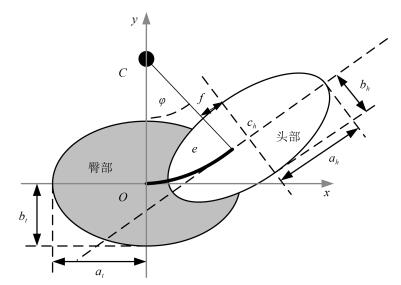
图 3 小鼠以恒定的体态曲率 $\rho$ 及移动速率 $v$ 的匀速圆周运动
Fig. 3 Uniform circular motion of a mouse with constant curvature $\rho $ and constant moving velocity $v$
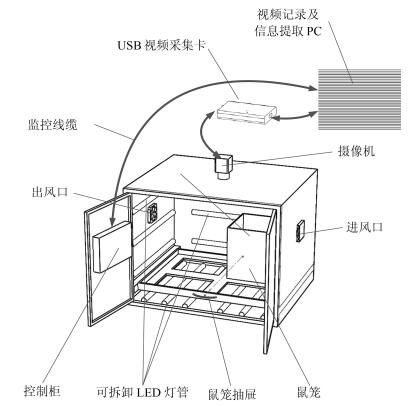
图 4 带有视频跟踪的小鼠行为学实验装置
Fig. 4 Experimental device for behavior analysis of mice with video tracking
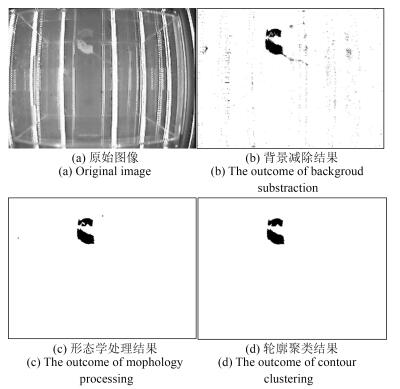
图 6 背景减除及后续的图像预处理过程示例
Fig. 6 An example of the background subtraction and the followed image preprocessing
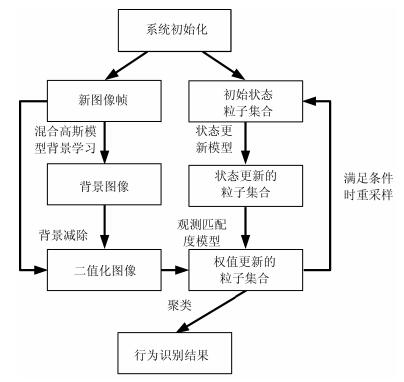
图 7 图像预处理与粒子滤波的小鼠运动参数提取流程图
Fig. 7 Flow chart of the parameters for behavior analysis based on image preprocessing and particle filter
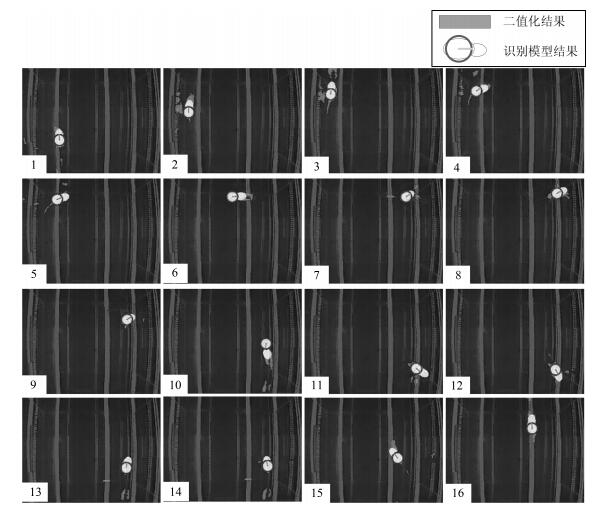
图 8 蓝光照射条件下的一段小鼠目标跟踪结果
Fig. 8 One piece of the object tracking result of a mouse in the blue illuminating condition
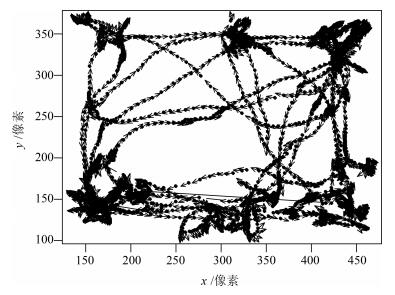
图 9 模板匹配及粒子滤波方法在三种不同光照条件下所提取的实验小鼠整体运动轨迹提取结果
Fig. 9 The extracting result of the moving trajectory of the laboratory mouse in three different illuminating conditions using model matching and particle filtering
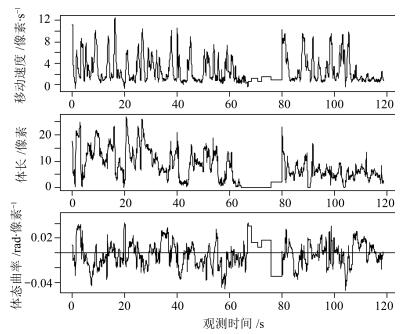
图 10 模板匹配及粒子滤波算法所提取的移动速度、体长变化及体态曲率结果
Fig. 10 The extracting result of the motion speed, body length variation and body curvature using model matching and particle filtering
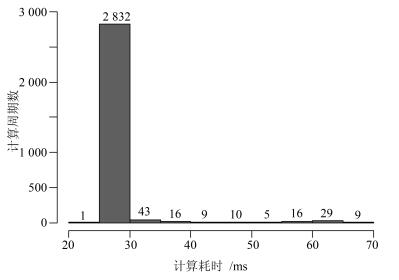
图 11 单周期运动参数提取算法计算耗时直方图
Fig. 11 Histogram of the computing time consumption of the motion parameter extraction algorithm for a single cycle
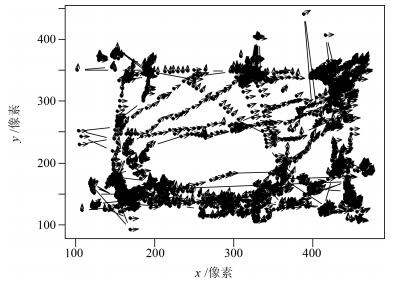
图 12 采用帧间差分法在三种光照条件下所提取的目标小鼠整体运动轨迹提取结果
Fig. 12 The extracting result of the moving trajectory of the object mouse in three different illuminating conditions using frame differencing method
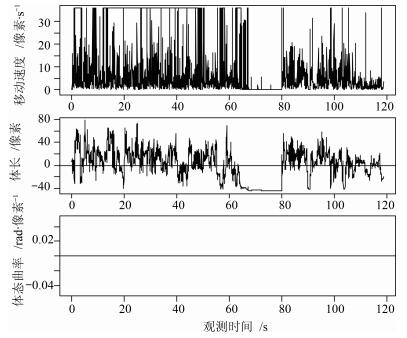
图 13 帧间差分法所提取的移动速度、体长变化及体态曲率结果
Fig. 13 The extracting result of the motion speed, body length variation, and body curvature using frame differencing method
1: Function Particle_filter $\chi _t $ , $z_{t+1}$ 2: $\bar {\chi }_{t+1} \leftarrow \emptyset,\chi _{t+1} \leftarrow \emptyset $ 3: For $m = 1:M$ 4: 以 ${\rm {\pmb X}}_{t+1}^{[m]} \sim p({\rm {\pmb X}}_{t+1} \vert {\rm {\pmb X}}_t )$ 采样获得 ${\rm {\pmb X}}_{t+1}^{[m]} $ 5: 计算权重 $w_{t+1}^{[m]} \mbox{=}p(z_{t+1} \vert {\rm {\pmb X}}_{t+1}^{[m]} )$ 6: $\bar {\chi }_{t+1} =\bar {\chi }_{t+1} +\left\langle {{\rm {\pmb X}}_{t+1}^{[m]} ,w_{t+1}^{[m]} } \right\rangle $ 7: End for 8: 依据 $\bar {\chi }_{t+1} $ 重采样生成 $\chi _{t+1} $ 9: Return $\chi _{t+1} $ 10: End function  下载: 导出CSV
下载: 导出CSV
表 2 实验小鼠状态变量及模型差异度 $r$ 的正态分布参数
Table 2 Parameters of the normalized distribution for the state variables and model-observation difference $r$ of a laboratory mouse
变量 单位 均值 $\mu $ 标准差 $\sigma $ 位置 $x$ 像素 $0.00$ $3.00 $ 位置 $y$ 像素 $0.00$ $3.00 $ 姿态角 $\theta $ rad $0.00$ $0.09 $ 速度 $v$ 像素 $\cdot \text{s}^{-1}$ $0.00$ $25.00 $ 体态伸长 $e$ 像素 $0.00$ $3.00 $ 体态曲率 $\rho $ $\text{rad}\cdot$ 像素 $^{-1}$ $0.00$ $0.01 $ 模型差异度 $r$ 1 $0.00$ $1.00 $
下载: 导出CSV
-
[1] 尚玉昌.动物行为学.北京:北京大学出版社, 2005.Shang Yu-Chang. Animal Ethology. Beijing:Peking University Press, 2005. [2] Dell A I, Bender J A, Branson K, Couzin I D, de Polavieja G G, Noldus L P J J, Pérez-Escudero A, Perona P, Straw A D, Wikelski M, Brose U. Automated image-based tracking and its application in ecology. Trends in Ecology & Evolution, 2014, 29(7):417-428 https://www.researchgate.net/publication/263087352_Automated_image-based_tracking_and_its_application_in_ecology [3] Jhuang H, Garrote E, Yu X L, Khilnani V, Poggio T, Steele A D, Serre T. Automated home-cage behavioural phenotyping of mice. Nature Communications, 2010, 1(6):Article No.68 https://dspace.mit.edu/openaccess-disseminate/1721.1/64492 [4] Ishii H, Ogura M, Kurisu S, Komura A, Takanishi A, Iida N, Kimura H. Development of autonomous experimental setup for behavior analysis of rats. In:Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, USA:IEEE, 2007. 4152-4157 [5] Salem G, Dennis J, Krynitsky J, Garmendia-Cedillos M, Swaroop K, Malley J D, Pajevic S, Abuhatzira L, Bustin M, Gillet J P, Gottesman M M, Mitchell J B, Pohida T J. SCORHE:a novel and practical approach to video monitoring of laboratory mice housed in vivarium cage racks. Behavior Research Methods, 2014, 47(1):235-250 doi: 10.3758/s13428-014-0451-5.pdf [6] Noldus L P J J, Spink A J, Tegelenbosch R A J. EthoVision:a versatile video tracking system for automation of behavioral experiments. Behavior Research Methods, Instruments, & Computers, 2001, 33(3):398-414 doi: 10.3758/BF03195394 [7] Rantalainen T, Silvennoinen M, Kainulainen H, Sievänen H. Vertical ground reaction force measurements and video measurements provide comparable estimates of distance moved by mice during artificial light and dark periods. Journal of Neuroscience Methods, 2011, 197(1):104-108 doi: 10.1016/j.jneumeth.2011.02.010 [8] Dielenberg R A, Halasz P, Day T A. A method for tracking rats in a complex and completely dark environment using computerized video analysis. Journal of Neuroscience Methods, 2006, 158(2):279-286 doi: 10.1016/j.jneumeth.2006.05.024 [9] Zurn J B, Jiang X H, Motai Y. Video-based tracking and incremental learning applied to rodent behavioral activity under near-infrared illumination. IEEE Transactions on Instrumentation and Measurement, 2008, 56(6):2804-2813 https://www.researchgate.net/publication/3094058_Video-Based_Tracking_and_Incremental_Learning_Applied_to_Rodent_Behavioral_Activity_Under_Near-Infrared_Illumination [10] Pistori H, Odakura V V V A, Monteiro J B O, Gonçalves W N, Roel A R, de Andrade Silva J. Mice and larvae tracking using a particle filter with an auto-adjustable observation model. Pattern Recognition Letters, 2010, 31(4):337-346 doi: 10.1016/j.patrec.2009.05.015 [11] 张敏, 张恒义, 郑筱祥.基于轮廓曲率和谱系聚类的大鼠体态自动识别.浙江大学学报(工学版), 2006, 40(3):524-527, 532 https://www.wenkuxiazai.com/doc/86e34c07227916888486d75c.htmlZhang Min, Zhang Heng-Yi, Zheng Xiao-Xiang. Automatic recognition of rat's postures based on contour curvature and hierarchical clustering analysis. Journal of Zhejiang University (Engineering Science), 2006, 40(3):524-527, 532 https://www.wenkuxiazai.com/doc/86e34c07227916888486d75c.html [12] de Chaumont F, Coura R D S, Serreau P, Cressant A, Chabout J, Granon S, Olivo-Marin J C. Computerized video analysis of social interactions in mice. Nature Methods, 2012, 9(4):410-417 doi: 10.1038/nmeth.1924 [13] Shi Q, Miyagishima S, Fumino S, Konno S, Ishii H, Takanishi A. Development of a cognition system for analyzing rat's behaviors. In:Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics (ROBIO). Tianjin, China:IEEE, 2010. 1399-1404 [14] Branson K, Belongie S. Tracking multiple mouse contours (without too many samples). In:Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA, USA:IEEE, 2005:1039-1046 [15] Farah R, Langlois J M P, Bilodeau G. Catching a rat by its edglets. IEEE Transactions on Image Processing, 2013, 22(2):668-678 doi: 10.1109/TIP.2012.2221726 [16] de Andrade Silva J, Gonçalves W, Machado B, Pistori H, de Souza A S, de Souza K P. Comparison of shape descriptors for mice behavior recognition. In:Proceeding of Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications. Berlin Heidelberg, Germany:Springer, 2010. 370-377 [17] Wu Y, Lim J, Yang M H. Online object tracking:a benchmark. In:Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition. Portland, OR, USA:IEEE, 2013. 2411-2418 [18] Smeulders A W M, Chu D M, Cucchiara R, Calderara S, Dehghan A, Shah M. Visual tracking:an experimental survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 36(7):1442-1468 https://www.researchgate.net/profile/Rita_Cucchiara/publication/258924422_Visual_Tracking_An_Experimental_Survey/links/0f31752e12b97368b7000000.pdf [19] Li X, Hu W M, Shen C H, Zhang Z F, Dick A, Van Den Hengel A. A survey of appearance models in visual object tracking. ACM Transactions on Intelligent Systems and Technology, 2013, 4(4):Article No.58 https://arxiv.org/pdf/1303.4803.pdf [20] Thrun S, Burgard W, Fox D. Probabilistic Robotics. Cambridge, UK:MIT Press, 2006. [21] 李天成, 范红旗, 孙树栋.粒子滤波理论、方法及其在多目标跟踪中的应用.自动化学报, 2015, 41(12):1981-2002 http://www.aas.net.cn/CN/abstract/abstract18773.shtmlLi Tian-Cheng, Fan Hong-Qi, Sun Shu-Dong. Particle filtering:theory, approach, and application for multi-target tracking. Acta Automatica Sinica, 2015, 41(12):1981-2002 http://www.aas.net.cn/CN/abstract/abstract18773.shtml [22] Hartigan J A, Wong M A. Algorithm as 136:a K-means clustering algorithm. Journal of the Royal Statistical Society. Series C (Applied Statistics), 1979, 28(1):100-108 [23] Bruyninckx H. Open robot control software:the OROCOS project. In:Proceedings of the 2001 IEEE International Conference on Robotics and Automation. Seoul, South Korea:IEEE, 2001:2523-2528 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 1908
- HTML全文浏览量: 405
- PDF下载量: 605
- 被引次数: 0
